W artykule Różne zastosowania podczerwieni – przegląd rozwiązań wspominałem, że mam zamiar opublikować więcej materiałów. W tym tekście postaram się wykorzystać zebrane informacje w praktyce. W artykule zostanie wykorzystany oscyloskop stworzony w domowych warunkach, który może okazać się przydatny również do innych zastosowań.
W amatorskich konstrukcjach nieraz można spotkać się z zastosowaniem pilota. Dzięki niemu możemy uruchamiać swojego robota z pewnej odległości (przydatne na zawodach), przełączać tryby pracy albo po prostu zdalnie nim sterować. Praktycznie wszystkie tego typu konstrukcje korzystają z pilotów w standardzie RC5. Nic dziwnego, w końcu Atmel udostępnił gotowy program do odczytywania tego kodu.
Ostatnio, gdy sam miałem potrzebę zastosowania sterowania na pilota, mój wybór także padł na RC5. Poszedłem na giełdę i kupiłem za 2 zł pierwszy lepszy pilot Philipsa (wcześniej gdzieś przeczytałem, że większość pilotów tej firmy korzysta z RC5, a po co przepłacać i czekać na dostawę w internecie). Oczywiście nie trudno się domyślić, że zakupiony sprzęt nie działał tak, jak bym tego oczekiwał. Postanowiłem nie poddawać się i rozkodować nowo nabytego pilota. Wynikami swojej pracy dzielę się na łamach tego artykułu.
Jak rozpoznać standard nadawania?
Pierwszym krokiem było poznanie istniejących sposobów kodowania. Co nieco napisałem o nich w poprzednim artykule. Dowiedziałem się, że istnieją dwa główne sposoby kodowania -manchester i kodowanie długością impulsu.
Pojedyncza ramka danych, poza kodem wciśniętego przycisku, niesie również kod urządzenia oraz pomocnicze bity startu, stopu, toggle czy pauzy.
Poza tym kody pilotów pracują na różnych częstotliwościach, takich jak:
36kHz
38kHz
40kHz
56kHz
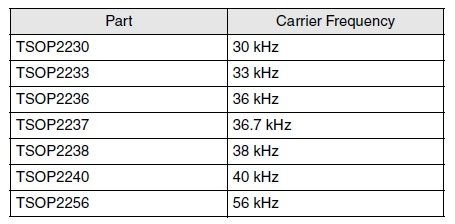
Niektóre starsze rozwiązania w ogóle nie używają modulacji częstotliwościowej. Do odczytania zmodulowanego sygnału używane są scalone dekodery, takie jak popularne TSOPy. Różne modele tego układu zostały stworzone do odczytywania popularnych częstotliwości kodowania. Poniżej tabela modeli TSOP22xx Vishaya:
Należy pamiętać, że czujnik odbiera pewien zakres częstotliwości w otoczeniu nominalnej.
Im szersze pasmo, tym łatwiej czujnikowi odebrać dane z innego pasma np. z 38kHz zamiast z 36kHz.
Zwykle jest to zjawisko negatywne, ponieważ możemy w ten sposób odbierać zakłócenia z innych pilotów. W tym jednak wypadku, jest to zjawisko pożądane, ponieważ łatwiej będzie nam odczytać ramkę danych z pilota, nie dysponując dokładnie tym modelem czujnika, co trzeba. Poniżej wykres z noty katalogowej tego samego czujnika TSOP22xx, obrazujący siłę generowanego sygnału przez poszczególne częstotliwości w odniesieniu do nominalnej:
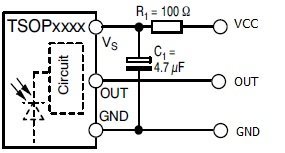
Ważne jest odpowiednie filtrowanie zakłóceń w takim czujniku. Najlepiej postępować zgodnie z zaleceniami producenta. Poniżej schemat sugerowany przez producenta czujników TSOP:
Zaczynamy testy
Pierwszym zadaniem jest więc określenie, na jakiej częstotliwości działa nasz pilot. Możliwe, że jest na to łatwiejszy sposób, ja jednak wybrałem dość toporne rozwiązanie. Postanowiłem zbudować na płytce stykowej prosty układ z czujnikiem, mikrokontrolerem i kilkoma diodami:
Schemat układu
Układ ten będzie potrzebny praktycznie do wszystkich testów. We wszystkich programach używam wewnętrznego rezonatora 4MHz. Przewidziałem w schemacie wyjście UARTa, co będzie później bardzo przydatne przy debugowaniu.
Napisałem prosty program, który ma zwiększać wartość wyświetlaną na LEDach za każdym razem, kiedy wykryje stan wysoki na wejściu czujnika. Liczyłem, że pilot będzie pracował na 36kHz, co okazało się zgodne z prawdą. W przeciwnym wypadku musiałbym testować czujniki na inne częstotliwości.
Warto wiedzieć, że zdecydowana większość pilotów działa na 36kHz lub 38kHz. Dotyczy to zarówno znanych marek, jak i taniej chińszczyzny.
Duże koncerny posiadają wiele standardów kodowania i używają nieraz kilku częstotliwości, np. Sony używa czasem częstotliwości 40kHz. Może testowana przeze mnie próbka nie była reprezentatywna, ale kody wszystkich pilotów jakie miałem można było odczytać za pomocą czujnika TSOP2236.
Interpretacja ramki danych
Kiedy już wiemy, że dysponujemy czujnikiem odczytującym dane z pilota, możemy przejść do głównego punktu programu. Naszym zadaniem będzie rozszyfrowanie ramki danych z pilota oraz określenie kodu poszczególnych przycisków.
Prosty oscyloskop
Do śledzenia przebiegów generowanych przez czujnik najlepiej użyć oscyloskopu. Tutaj pojawia się poważny problem. Profesjonalne oscyloskopy są bardzo drogie i mało kto może sobie na nie pozwolić. Jednak rozwiązanie jest prostsze, a przede wszystkim tańsze niż mogłoby się wydawać. Jedyne czego potrzebujemy to... starego kabla od słuchawek. Poza tym musimy zainstalować program Soundcard Oscilloscope. Dzięki niemu możemy używać przetwornika analogowego-cyfrowego naszej karty dźwiękowej jako wejścia oscyloskopu, natomiast przetwornika cyfrowo-analogowego jako generatora przebiegów.
Program umożliwia również tworzenie wykresów XY oraz śledzenie przebiegów w dziedzinie częstotliwości. Kabel od słuchawek przecinamy w odległości kilkudziesięciu centymetrów od wtyczki tak, aby można go było łatwo podłączyć do komputera i płytki testowej. Następnie ręką rozdzielamy dwie żyły inożykiemzdejmujemyz każdej z nich izolację.
W każdej żyle powinna się znajdować kolejna warstwa izolacji, zawierająca przewód sygnałowy oraz nieizolowany przewód masy.
Wtyczka natomiast zawiera wyprowadzenia zgodne z poniższym obrazkiem:
Na odsłonięte nożem przewody warto założyć drucik i rurkę termokurczliwą. W ten sposób otrzymamy prowizoryczną sondę oscyloskopu.
Nie można jednak za jej pomocą badać wszystkich przebiegów. Karta dźwiękowa jest przystosowana do napięć nie większych niż 2V. Dlatego, jeśli chcemy badać sygnały o wyższym napięciu, musimy koniecznie skorzystać z dzielnika napięcia.
Przed podłączeniem sondy do komputera należy się upewnić, za pomocą miernika, czy masy układu i karty dźwiękowej się zgadzają oraz czy maksymalne napięcie na pewno nie przekracza 2V. Nieprzestrzeganie tych zasad może spowodować uszkodzenie karty dźwiękowej, a w ekstremalnych wypadkach nawet całego komputera.
Używanie oscyloskopu
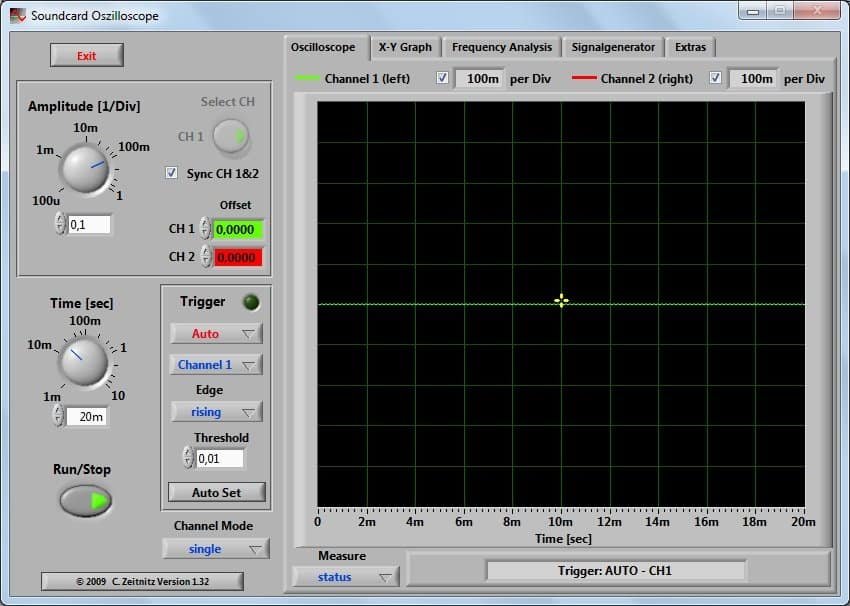
Domyślnym wejściem naszego oscyloskopu jest gniazdo mikrofonu, natomiast wyjściem generatora jest gniazdo słuchawkowe. Karta dźwiękowa jest przystosowana do generowania/odbierania przebiegów o częstotliwościach z zakresu słyszalności ludzkiego ucha, czyli w zakresie około 20-22000 Hz. Obsługa programu jest bardzo prosta.
Poniżej okno główne:
Pokrętłami Amplitude i Time skalujemy osie, za pomocą wartości Offset przesuwamy wartość początkową przebiegu na osi Y dla poszczególnych kanałów. W ramce Trigger możemy ustawić tryby wyzwalania. Dostępne opcje to:
Auto - przebieg jest wyświetlany cały czas na ekranie, nawet jeśli nie zostanie przekroczony próg wyzwalania.
Normal - za każdym razem, gdy próg zostanie przekroczony, pojawia się nowy przebieg.
Single - po wciśnięciu przycisku Run/Stop wyświetlany jest pierwszy przebieg po przekroczeniu progu wyzwalania.
Niżej można wybrać kanał, dla którego ustalamy warunki wyzwalania, rosnące lub opadające zbocze przebiegu(edge) oraz próg (threshold), jaki musi przekroczyć zbocze, aby zostało zarejestrowane przez oscyloskop.
W lewym dolnym rogu wykresu pojawia nam się przycisk Save, który zapisuje przebiegi zarówno w formie obrazka, jak i pliku csv. Dzięki temu dane z oscyloskopu można następnie analizować za pomocą przeznaczonych do tego programów.
Niektórzy mogą się dziwić, jak sprzętem odbierającym częstotliwości do 22kHz mamy zbadać sygnał o częstotliwości 36kHz.
Częstotliwość modulująca 36kHz służy tylko do przenoszenia sygnału, natomiast odczytywane przez czujnik dane mają kilkanaście razy mniejszą częstotliwość.
Dlatego właśnie za pomocą oscyloskopu z karty dźwiękowej można również bez problemu zbadać przebiegi zmodulowane częstotliwością 56kHz.
Pomiary
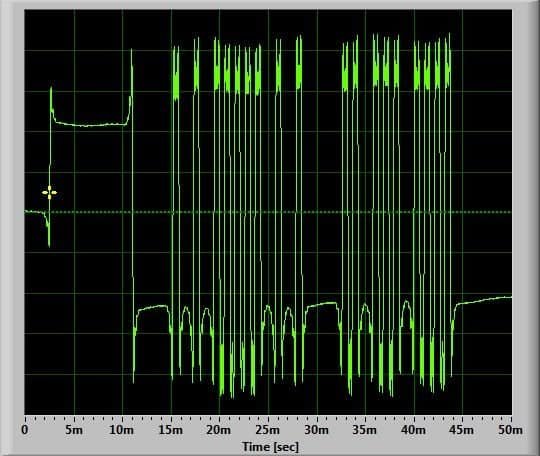
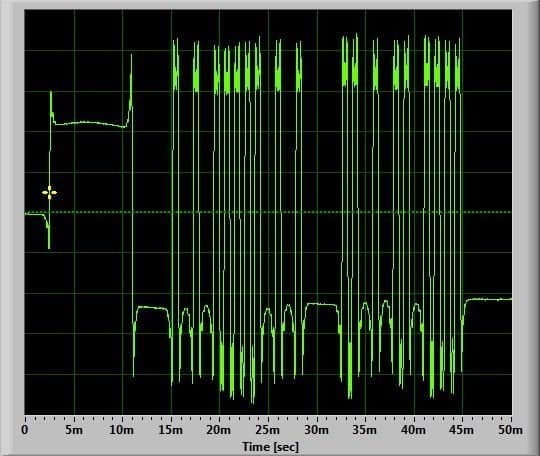
Po podłączeniu czujnika zgodnie z zaleceniami producenta oraz poprowadzeniu wyjść OUT i GND do sondy oscyloskopu, mogłem rozpocząć badanie przebiegów. Oscyloskop ustawiłem w trybie single, a próg wyzwalania podniosłem na tyle, aby nie łapał śmieci. Poniżej przebieg dla klawisza "1":
Jedna rzecz nieco mnie zdziwiła. Otóż TSOP2236 domyślnie wskazuje stan wysoki, a do niskiego przechodzi kiedy otrzymuje daną. Z wykresu na oscyloskopie wynika natomiast, że jest odwrotnie. Po szybkim sprawdzeniu za pomocą miernika doszedłem do wniosku, że oscyloskop pokazuje odwrócone wartości.
Nie wiem, dlaczego tak się dzieje. Trzeba pamiętać, że to tylko prosta namiastka prawdziwego oscyloskopu, więc należy sobie jakoś radzić. W końcu czasy trwania poziomów logicznych są ok, a zmiana polaryzacji nie jest specjalnie kłopotliwa.
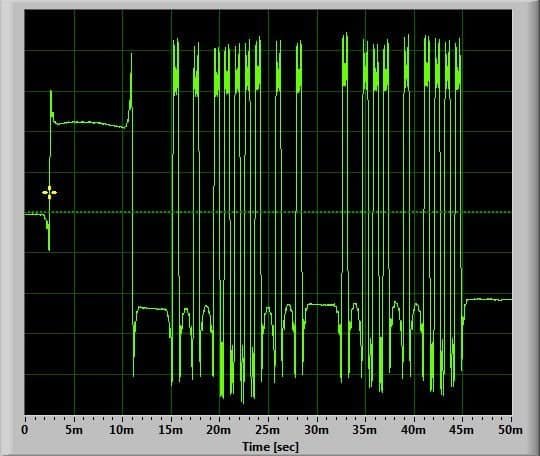
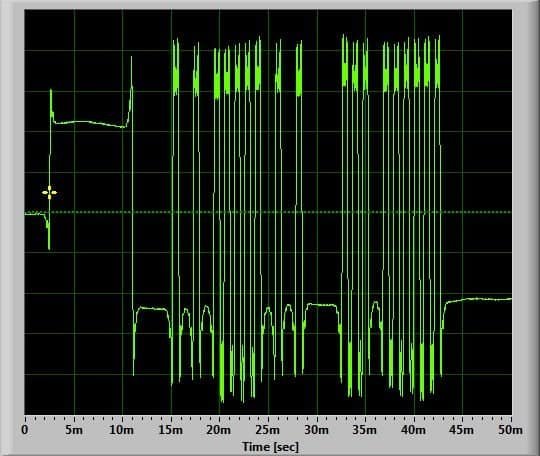
Dla porównania zapisałem przebiegi dla przycisków 2, 3, 4:
Interpretacja oscylogramów
Jak widzimy na przebiegach, każdy sygnał zaczyna się od dwóch długich impulsów. Następnie jest kilka dużo krótszych i kolejny długi. Do tego momentu każda ramka danych wygląda tak samo.
Różnią się dopiero ostatnią serią krótkich impulsów. Jeżeli porównamy te obserwacje ze znanymi kodami do pilotów, możemy dojść do wniosku, że początkowe długie sygnały służą do inicjalizacji. Następna seria krótkich impulsów to kod systemu, dlatego jest identyczny dla każdego przycisku.
Ostatnia seria krótkich impulsów, która jest różna dla każdego przycisku musi zawierać kody komend. Długości poszczególnych ramek różnią się od siebie, więc mamy do czynienia z kodowaniem za pomocą długości impulsu. Przyjrzyjmy się teraz seriom krótkim.
Jak widać, składają się z 9 stanów niskich (pamiętamy o wadzie oscyloskopu) o takiej samej długości oraz ośmiu stanów wysokich, których długość przybiera jedną z dwóch wartości. Nie wiemy, czy producent założył sobie dłuższy impuls jako 1 czy 0, ale tak naprawdę nas to nie obchodzi. Możemy przypisać te wartości po swojemu i odczytywać tak, jak nam wygodnie. Ja przyjąłem, że 0 to krótki sygnał, a 1 to długi.
Następnym krokiem jest poznanie dokładnych zależności czasowych. W tym celu posłużyłem się Matlabem, ale nada się do tego każdy program do obróbki danych, nawet zwykły Excel. Wyznaczyłem punkty początku i końca każdego rodzaju impulsu i obliczyłem czasy ich trwania. Operację powtórzyłem na kilku przebiegach aby mieć pewność, że nie popełniłem błędu. Następnie odczytałem kody każdego przycisku i zapisałem sobie wszystkie informacje o moim pilocie:
Częstotliwość modulacji: 36kHz
Ramka danych:
bit startu 1: 8ms LOW
bit startu 2: 4ms HIGH
osiem bitów systemu
bit przerwy: 4ms HIGH
osiem bitów komendy
koniec informacji: HIGH do otrzymania kolejnej ramki
Kodowanie bitów systemu i komendy:
sygnał low: 422us
sygnał high "0": 422us
sygnał high "1": 1.6ms
Między ósmym bitem danych, a przerwą lub końcem występuje jeszcze jeden sygnał low 422us.
kod systemu: 11000011
Lista komend:
0 - 11110000
1 - 01001000
2 - 01101000
3 - 10011000
4 - 00100000
5 - 00110000
6 - 00011010
7 - 01110000
8 - 10010000
9 - 00111000
power - 00011000
mute - 01011000
prog - 01100000
audio - 11101000
sys - 01010000
lnb - 10111000
up - 11011000
down - 11001000
left - 01000000
right - 00111001
store - 11111000
next - 10101000
fav - 10001000
hv - 11010000
tone - 01111000
radio - 00000000
tvsat - 10100000
lock - 00101000
Dla pewności postanowiłem jeszczesprawdzić przebiegiza pomocą prostego programu, napisanego w asemblerze, wykorzystującego USART do kontroli poprawności odczytywanych danych. Jego zadaniem jest odczytanie stanu pinu w przerwaniu timera, dodanie go do bufora odczytu, a po uzbieraniu ośmiu bitów wysłanie ich do PC.
Co ciekawe, wcześniej próbowałem sprawdzać pin w pętli, a nie w przerwaniu lub używać przerwania zewnętrznego, a nie timera. Okazywało się wtedy, że wartość przy zmianie przez jakiś czas oscyluje, powodując efekt podobny do drgania styków przy switchach, tylko oczywiście trwający o wiele krócej.
Na szczęście sprawdzanie w przerwaniu timera co 64us całkowicie wyeliminowało ten problem, a na odczycie z terminala wyniki są zgodne z oczekiwaniami. Oto odczyt z terminala w kodzie szesnastkowym dla jednej ramki danych:
Poszczególne fragmenty przebiegu z oscyloskopu można łatwo dopasować do odpowiadających im ciągów zer i jedynek na terminalu. Dzięki temu mam pewność, że mikrokontrolerowi uda się odczytać ramkę danych bez żadnych zakłóceń. Poniżej kod programu w asemblerze. Jeśli ktoś nie zna tego języka, to i tak nie powinien mieć problemu ze zrozumieniem dzięki komentarzom i dokumentacji Atmela:
Assembly (x86)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
.include"m16def.inc";definicje dla atmegi 16
;deklaracje nazw rejestrow pomocniczych
.defA=r16
.deflicz=r17
.defbuf=r18
;USART tylko transmisja, 9600baud 8bitów even parity
movA,buf;a nastepnie skopiowanie buf do bufora UART
outUDR,A
clrlicz;i wyzerowanie licznika
reti
Program dekodujący
Teraz kolej na napisanie pełnego kodu do dekodera pilota. Tutaj po raz kolejny wybrałem asemblera z kilku powodów. Po pierwsze, będzie to prosta aplikacja, wykorzystująca głównie operacje na rejestrach, a takie pisze się w asemblerze bardzo przyjemnie.
Po drugie, będę mógł dokładnie prześledzić działanie programu w debuggerze AVR Studio 4 i szybciej znaleźć ewentualne błędy. Ponadto, podczas pisania mogę ściągnąć niektóre fragmenty z noty aplikacyjnej Atmela, dotyczącej RC5. Pod spodem gotowy kod z opisem w komentarzach:
Assembly (x86)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
.include"m16def.inc";definicje dla atmegi 16
;deklaracje nazw rejestrow
.DEFtmp=r16;rejestr tymczasowy
.DEFtimerL=r17;trzy liczniki do obslugi przerwania T0
.DEFtimerH=r18
.DEFtimertemp=r19
.DEFsystem=r0;rejestr przechowujacy kod systemu
.DEFcommand=r1;rejestr przechowujacy kod komendy
.DEFstan=r20;pomocniczy rejestr przechowujacy aktualny stan PIN.D2
;konfiguracja timera T0
.EQUTIMSKconf=(1<<TOIE0)
.EQUTCCR0conf=(1<<CS00)
.CSEG
.ORG0x00
jmpRESET;skok do obslugi resetu
.ORG0x12
jmpT0_OVF;skok do obslugi przerwania T0
.ORG0x100
;obsluga resetu - poczatek programu
RESET:
;inicjalizacja stosu
lditmp,low(RAMEND)
outspl,tmp
lditmp,high(RAMEND)
outsph,tmp
;pullup na PD2
lditmp,0x04
outPORTD,tmp
;PORT C - wyswietla na linijce diod odczytany bajt, wyjscie, poczatkowe wartosci H
sertmp
outDDRC,tmp
outPORTC,tmp
;konfiguracja timera
lditmp,TCCR0conf
outTCCR0,tmp
lditmp,TIMSKconf
outTIMSK,tmp
;aktywacja przerwan globalnych
sei
;poczatek funkcji dekodujacej, reset timerow
detect:
clrtimerH
clrtimertemp
detect1:
clrtimerL
;sprawdzenie czy jest idle przez 7.5ms (timingi dla taktowania 4MHz)
idle:
cpitimerH,8;sprawdzenie czy minelo 131ms
brshdetect;jak nie to wracamy do poczatku
sbrsstan,0;sprawdzenie stanu pinu
rjmpdetect1
cpitimerL,100;sprawdzenie czy stan sie utrzymuje przez 7.5ms
brloidle;jezeli nie to wracamy do detecta
;wykrycie poczatku bitu startu
clrtimerH
start:
cpitimerH,8
brshdetect;jezeli startu nie ma przez 131ms to wracamy do poczatku
sbrcstan,0;jezeli na pinie jest 1 to petla, jak nie to algorytm idzie dalej
rjmpstart
clrtimerL
;wykrycie stanu niskiego trwajacego 9.6ms
start1:
cpitimerL,150
brshdetect;jezeli 0 trwa dluzej niz 9.6ms albo krocej niz 4ms to error
sbrsstan,0;jezeli nie ma 0 na PD2 to powrot do start1
rjmpstart1
cpitimerL,50
brlodetect
clrtimerL
;wykrycie stanu wysokiego przez 4ms
start2:
cpitimerL,100
brshdetect;jezeli trwa dluzej niz 6ms albo krocej niz 2.5 to error
sbrcstan,0
rjmpstart2
cpitimerL,20
brlodetect
;poczatek odczytywania systemu
system_init:
clrsystem
clrtmp
;kolejny bit systemu
sys_next:
clrtimerL
;odczytanie sygnalu LOW
sys_low:
cpitimerL,12
brshdetect;jezeli dluzej niz 760us to od nowa
sbrsstan,0;jezeli nie pojawia sie 0 to powrot do sys_low
rjmpsys_low
clrtimerL;jezeli pomyslnie odczytano low to zerujemy timer
cpitimerL,15;jezeli dlugi high to wpisujemy 1 na ostatni bit systemu
brlosys_end;jezeli nie to zostanie zero
incsystem
sys_end:
cpitmp,8; jezeli licznik mniejszy niz 8 to wracamy do odczytu kolejnego bitu
brlosys_next
;odczytanie ostatniego stanu niskiego po odczytaniu systemu
sys_end2:
clrtimerL
cpitimerL,12
brshdetect;jezeli dluzej niz 760us to od nowa
sbrsstan,0
rjmpsys_end2
clrtimerL
;do tego momentu na pewno dobrze dziala
;wykrycie stanu wysokiego przez 4ms
przerwa:
cpitimerL,100
brshdetect;jezeli trwa dluzej niz 6ms albo krocej niz 2.5 to error
sbrcstan,0
rjmpprzerwa
cpitimerL,20
brlodetect
;odczytywanie command takie samo jak w wypadku stanu tylko z zamienionymi nazwami
command_init:
clrcommand
clrtmp
;kolejny bit systemu
com_next:
clrtimerL
;----------------------
com_low:
cpitimerL,12
brshdetect;jezeli dluzej niz 760us to od nowa
sbrsstan,0
rjmpcom_low
clrtimerL;jezeli pomyslnie odczytano low to zerujemy timer
;sygnal high i odczytanie "0" albo "1"
com_high:
cpitimerL,40
brshkoniec
sbrcstan,0
rjmpcom_high
lslcommand
inctmp
cpitimerL,15;jezeli dlugi high to wpisujemy 1 na ostatni bit systemu
brlocom_end;jezeli nie to zostanie zero
inccommand
com_end:
cpitmp,8
brlocom_next
;odczytanie ostatniego stanu niskiego po odczytaniu systemu
com_end2:
clrtimerL
cpitimerL,12
brshkoniec;jezeli dluzej niz 760us to od nowa
sbrsstan,0
rjmpcom_end2
clrtimerL
;----------------------
;po poprawnym odczycie zwrocenie na linijke led wartosci command
outPORTC,command
;powrot do poczatku programu
koniec:
jmpdetect
T0_OVF:
clrstan;jezeli w czasie przerwania pd2 jest High to stan = 0xFF
sbicPIND,2;w przeciwnym razie 0x00
serstan
inctimerL;zwiekszenie wartosci timerow
inctimertemp
brnet0_koniec;jezeli timertemp==0 to zwiekszenie timerH
inctimerH;timerH pracuje 256 razy wolniej niż timerL i timertemp
t0_koniec:
reti;powrot z przerwania
Po napisaniu części odczytujących kolejne fragmenty ramki, warto dopisać linijki zapalające diody, w celu sprawdzenia, czy wszystko robimy poprawnie.
Łatwiej debugować na bieżąco, niż później męczyć się z szukaniem błędów. Mój program przeszedł właśnie taki proces debugowania, co pozwoliło mi dość szybko uporać sięz nim.
Program działa bez zarzutu, wykrywa wszystkie kody przycisków dokładnie tak, jak w opisanej wyżej specyfikacji. Ma on jednak pewne wady. Mimo korzystania z przerwań, dalej używane jest również odpytywanie w pętli. Poza tym trudno byłoby używać go jako funkcji w innym programie, jeżeli każde odczytanie przycisku zajmowałoby kilkadziesiąt milisekund, podczas których procesor nie może się zajmować niczym innym.
W większych projektach asembler jednak nie jest tak poręczny i przydałoby się również dysponować kodem w C. Dlatego właśnie napisałem bibliotekę danego pilota w tym języku. Mogę jej teraz z powodzeniem używać jako fragment większego projektu.
Biblioteka w C
Wykonuje ona wszystkie operacje w przerwaniu. Mimo że przerwanie wydaje się bardzo rozbudowane, składa się z wielu instrukcji warunkowych i tak naprawdę każda możliwa ścieżka wykonuje się dość szybko.
Przerwanie jest zorganizowane jako zbiór stanów, w których aktualnie może się znajdować układ. Za każdym razem są w nim sprawdzane warunki przejścia do innego stanu i jeśli zostaną spełnione, przy następnym przerwaniu układ znajdzie się w kolejnym stanie. Oczywiście nie ma najmniejszego problemu, żeby przeskalować program dla innych wartości oscylatora.
Jak widać, za pomocą prostych narzędzi i odrobiny wiedzy dotyczącej kodowania pilotów, udało mi się przystosować do własnych celów sygnał z nieznanego pilota.
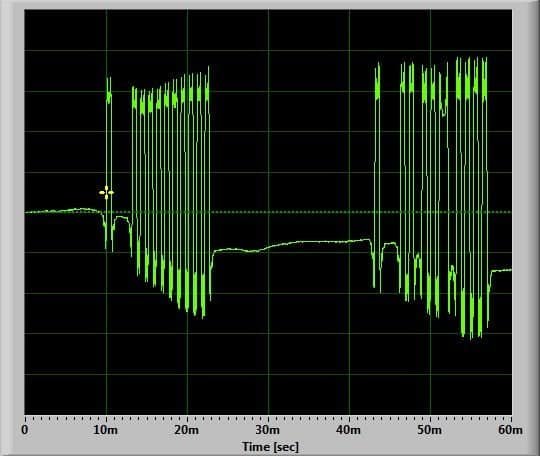
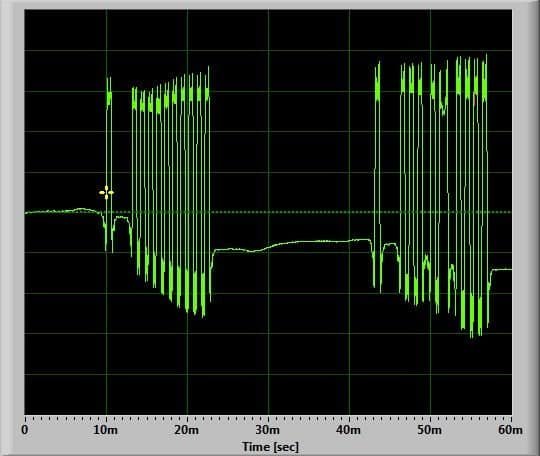
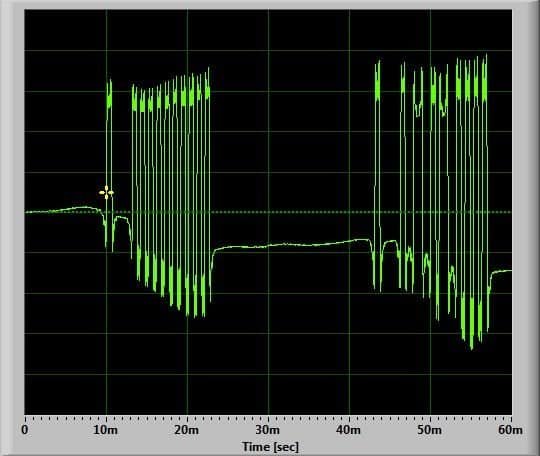
Stosując podobne techniki można uporać się z każdym innym kodowaniem. Na zakończenie przeanalizujmy jeszcze przebieg z innego pilota do telewizora, jaki akurat miałem w domu. Nie będę już się w niego zagłębiać, ale proces dekodowania przebiegałby podobnie jak wyżej.
Na przebiegach widać wyraźnie część z kodem systemu, 20ms przerwy i kod komendy.
Każda z części zaczyna się dwoma sygnałami inicjalizującymi. Poza tym widzimy, że wszystkie przebiegi są tej samej długości, czyli mamy do czynienia z kodowaniem Manchester.
W kodzie systemu wszystkie bity mają tę samą wartość, natomiast w kodach komend dobrze widać, które bity mają inne wartości. Dekodując kod typu Manchester warto posiłkować się notą dotyczącą kodu RC5.
Innym sposobem jest odczytywanie połówek bitów, a następnie programowa zamiana ciągów 01 i 10 na odpowiednie wartości. Zostawiam to już jednak do samodzielnych eksperymentów.
Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.






















Trwa ładowanie komentarzy...