Kursy • Poradniki • Inspirujące DIY • Forum





Wpisy z kategorii: Mechanika, strona 4
Roboty kroczące – konstrukcja mechaniczna
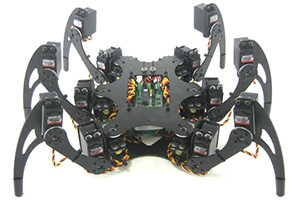
Roboty kroczące zyskują ostatnio coraz większą popularność. Z konstrukcji budowanych tylko w ośrodkach badawczych stały się urządzeniami komercyjnymi oraz budowanymi amatorsko.
W artykule omówione zostały podstawy, związane z konstrukcją mechaniczną robotów kroczących.
Roboty kroczące – teoria i podstawy projektowania
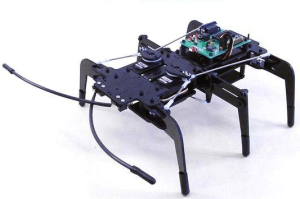
Projektując robota kroczącego, konstruktor musi odpowiedzieć sobie na wiele pytań. Wiąże się to między innymi z założeniami konstrukcyjnymi.
Część z nich jest natury ogólnej, część musi jednak być szczegółowa. W artykule opisałem najważniejsze zagadnienia związane z projektowaniem robotów mobilnych kroczących.
Przekładnie mechaniczne w robotyce
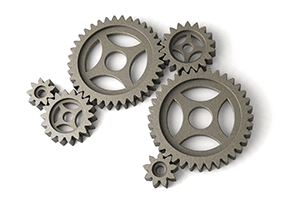
We wszystkich niemal konstrukcjach robotów mamy do czynienia z przekładniami. Wyjątkami są tu roboty budowane na silnikach krokowych oraz lekkie konstrukcje, których silniki mają wystarczająco duży moment.
Dobry konstruktor powinien jednak w swoich robotach stosować odpowiednie przekładnie.
Jak zrobić przekładnię do robota?
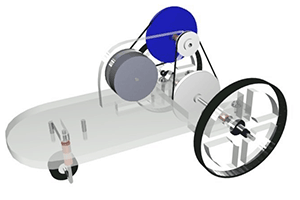
Hobbyści budując roboty często napotykają problem: skąd wziąć silnik z przekładnią? W mniejszych konstrukcjach przeważnie używane są serwomechanizmy modelarskie.
Osobiście do tego celu wykorzystuję części mechaniczne ze zużytych sprzętów elektronicznych (magnetofonów, magnetowidów, napędów CD-ROM do PC itp).

Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




