Kursy • Poradniki • Inspirujące DIY • Forum





Wpisy z kategorii: Programowanie, strona 3
Roboty MicroMouse – 5 metod przeszukiwania labiryntu
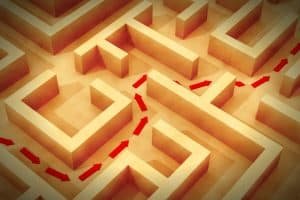
MicroMouse to rodzaj zawodów, w których nasz robot (mysz) ma za zadanie w jak najkrótszym czasie rozwiązać labirynt.
Rozwiązanie labiryntu, to jego przeszukanie oraz odnalezienie najkrótszej (bądź najszybszej – nie zawsze są one równoważne) drogi z kwadratu startowego (narożnik labiryntu) do jego środka.
OpenCV – #4 – Rozpoznawanie pisma
W tej części kursu zajmiemy się rozpoznawaniem cyfr. Opisałem jeden z algorytmów służących do klasyfikacji obiektów K-Nearest Neighborhood.
Zamieszczone tutaj informacje pokazują podstawy dotyczące systemów uczących się i klasyfikacji obiektów.
Intel Edison, czyli Internet Rzeczy dla każdego(?)

Coraz częściej słyszymy o IoT, czyli Internecie Rzeczy. Jednak, czy każdy zdaje sobie sprawę, co kryje się pod tym zwrotem?
W artykule opisałem część moich spostrzeżeń, na które zwróciłem uwagę podczas testów jednej z najpopularniejszych platform dedykowanych IoT!
Tworzenie aplikacji Android – #4 – Sterowanie robotem

Tym razem zagłębimy się dokładniej w możliwości naszego środowiska. Konkretnie, zajmiemy się bardziej algorytmicznymi aspektami programów.
W przykładach wykorzystamy zmienne, warunki oraz pętle. Następnie dane z akcelerometru wyślemy przez Bluetooth do telefonu.
Jak zaimplementować regulator PID dla silnika z enkoderem?

W artykule przedstawię proces projektowania regulatora PID do kontroli prędkości silnika DC wyposażonego w enkoder.
Najpierw zajmiemy się identyfikacją modelu silnika. Następnie dostroimy dla niego regulator PID, po czym sprawdzimy go w praktyce.
Sprawdź jak (tanio) zbudować robota z systemem Linux!

Od jakiegoś czasu na forum pojawiają się artykuły omawiające praktyczne wykorzystanie większych mikrokontrolerów w robotyce.
Przez większe, rozumiem procesory Cortex-Ax, ARM9 lub ARM11. Niewątpliwą zaletą takich układów jest możliwość wykorzystania systemu operacyjnego z komputerów PC (np.: Linuxa).
Filtr Kalmana w praktyce – 3 przykłady z kodami!
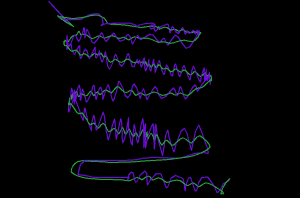
W artykule, postaram się opisać w prosty sposób filtr Kalmana. Zostanie tutaj podana minimalna dawka teorii, którą musimy dysponować aby zrozumieć jak działa filtr oraz jak go stosować.
Mam nadzieję, że udało mi się przedstawić to zagadnienie w sposób łatwy do zrozumienia.
Wszystko, co musisz wiedzieć, aby uruchomić PWM

W artykule chciałbym wytłumaczyć inicjalizację i wykorzystanie sprzętowego PWM-u w robotach, np. do sterowania prędkością silników.
Pamiętam, że jako początkujący miałem z tym duży problem. Znałem zasadę działania PWM, ale nie wiedziałem jak to połączyć z resztą programu.
OpenCV – #3 – Detekcja i rozpoznawanie twarzy
W tej części zajmiemy się detekcją twarzy w OpenCV. Za pomocą funkcji, które dostarcza nam biblioteka możemy zrobić to w prosty sposób.
Dodatkowo możemy wykryć szereg innych cech takich jak oczy, usta, nos, uszy itp.

Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




