Artykuł ten omawia użycie krańcówek oraz microswitchy w robotyce.
Jest to stosunkowo tania i prosta metoda na zapewnienie konstrukcji podstawowego kontaktu z otoczeniem np.: przez wykrywanie przeszkód i skuteczne ich omijanie.
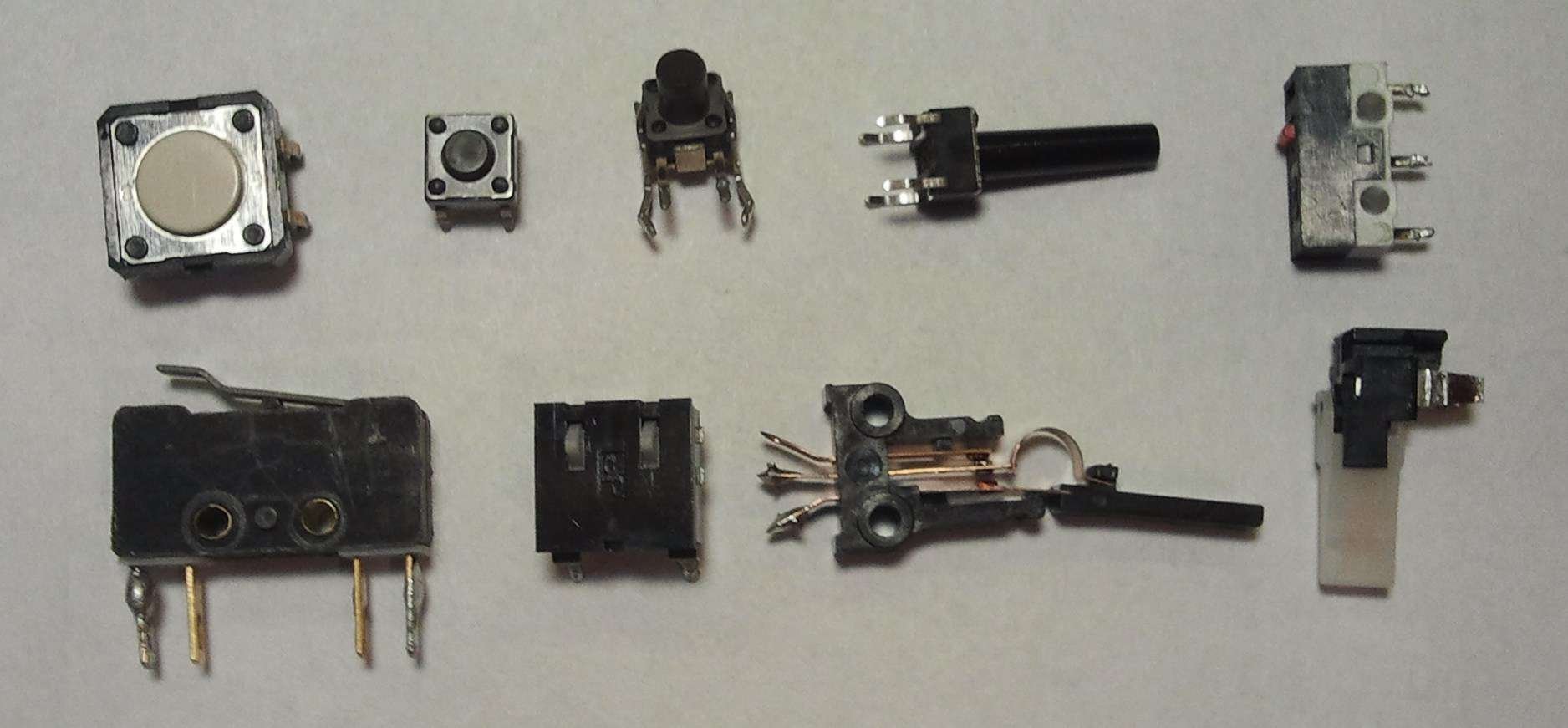
Microswitch, czujnik krańcowy lub po prostu przycisk; określenia te odnoszą się do prostego czujnika, który składa się przynajmniej z 2 blaszek stanowiących bazę oraz jednej, która pod wpływem działającej siły mechanicznej styka lub rozwiera wyprowadzenia.
Przykłady microswitchy.
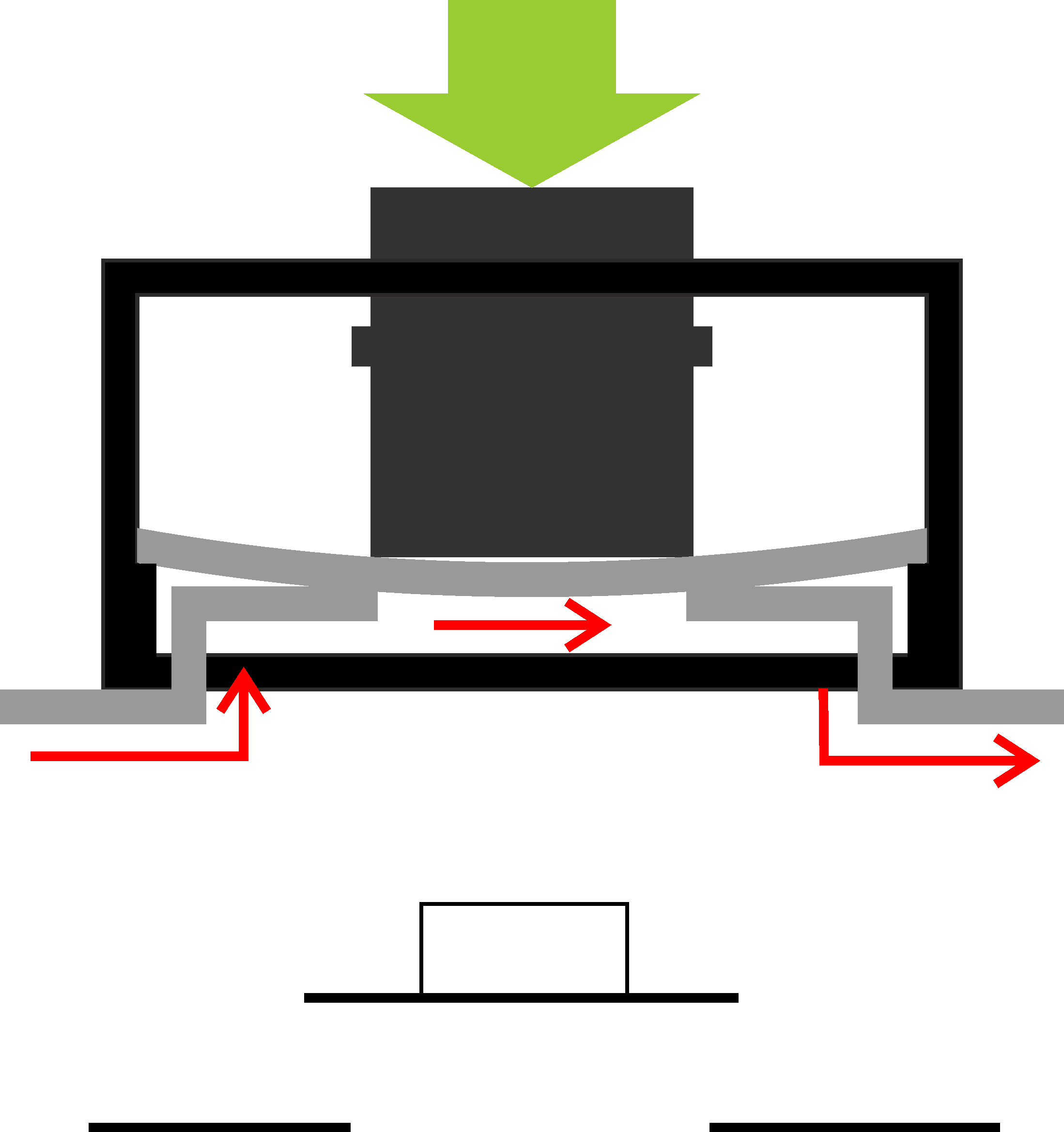
Schematycznie microswitch można przedstawić następująco:
Zasada działania microswitcha.
Takie przyciski najłatwiej skojarzyć z klawiaturą w telefonie, komputerze, zamkiem cyfrowym lub z myszką, którą najpewniej masz pod ręką. W ogólności microswitche są tam, gdzie do układu cyfrowego należy wprowadzić jakieś informacje.
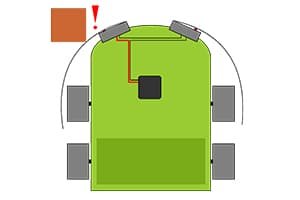
W jaki więc sposób użyć tego drobnego czujnika w robotyce? Często ludzie tworząc wynalazki sięgają do wzorców z przyrody (tzw. biomimetyzm). W tym przypadku podobne „czujniki” istniały dawno przed wynalezieniem microswitcha, a są nimi zwierzęce wąsy (wibrysy - receptory czuciowe wrażliwe na dotyk). Podobnie można wyposażyć robota w wąsy, które pod wpływem nacisku zwierałyby styki, dostarczając informacji o zderzeniu się robota z przeszkodą, jak na poniższej ilustracji:
Zastosowanie czujników krańcowych w robocie mobilnym.
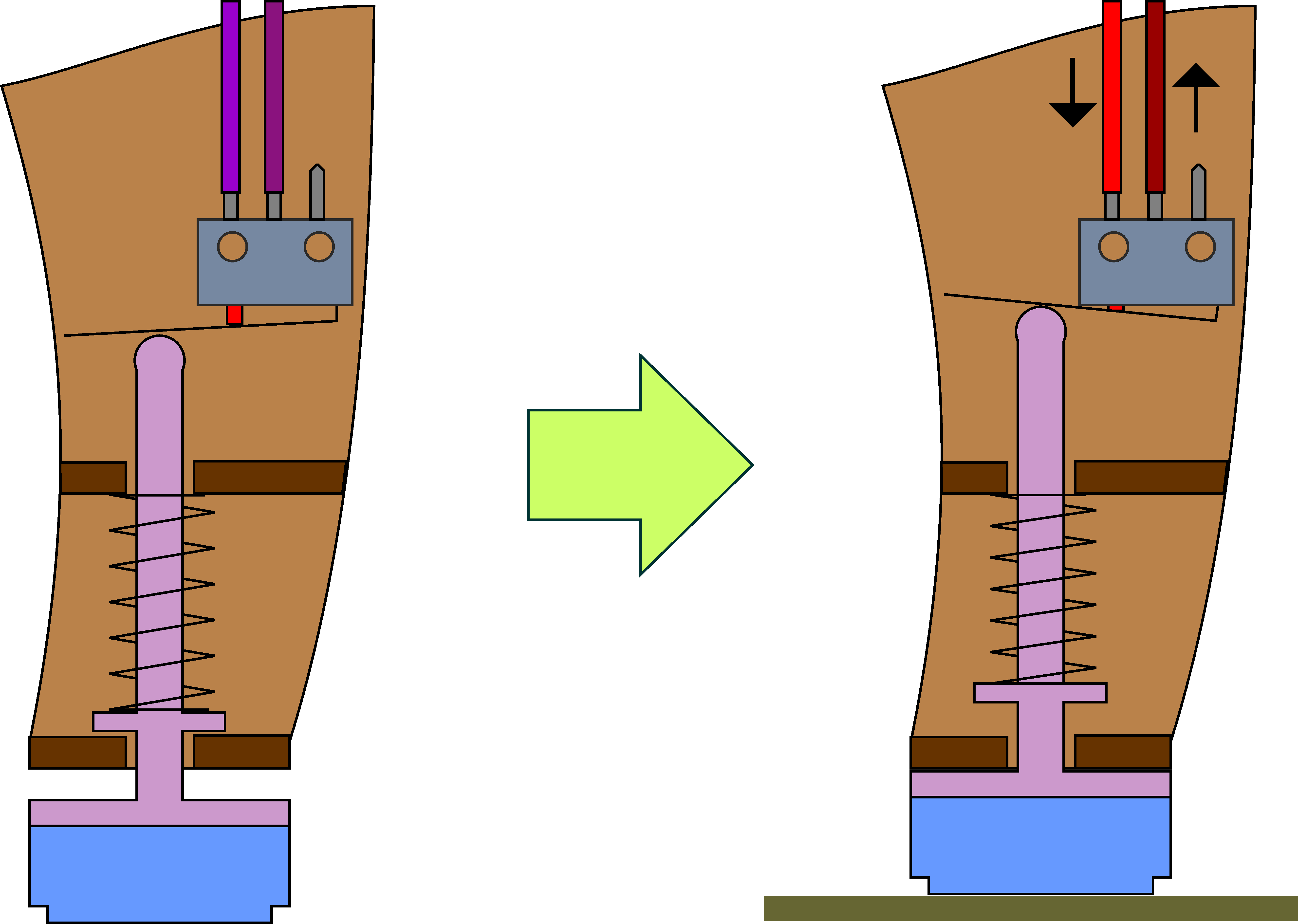
Innym zastosowaniem (bardzo popularnym) jest umieszczenie czujników krańcowych w każdym z odnóży robota kroczącego. Robot może rozróżnić czy stopa (efektor) aktualnie znajduje się na podłożu czy wisi w powietrzu. Dzięki takim informacjom robot podejmuje decyzje, czy należy dalej sięgać w dół, a jeżeli nie jest to możliwe (odnóże robota osiągnęło tzw. punkt nieosobliwości) to znaczy, że w terenie jest jakaś wyrwa i trzeba ją obejść.
Mechanika takiej stopy wygląda w następujący sposób:
Zastosowanie czujników krańcowych w robocie kroczącym.
Podłączenie
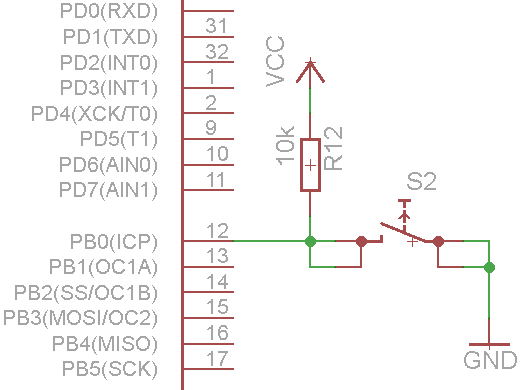
Przełączniki są łatwe w obsłudze, od strony technicznej wymagają jedynie rezystorów oraz jednego kondensatora. Przykładowa realizacja czujnika na bazie microswitcha przedstawiona jest na poniższym schemacie wykonanym w programie EAGLE, którego kurs został wcześniej opublikowany.
Połączenie microswitcha z pull-upem w układzie z mikrokontrolerem.
Ktoś mógłby zapytać do czego jest rezystor połączony z przyciskiem. Jego użycie nie jest przypadkowe, a nawet konieczne. W stanie nieaktywnym, gdyby przełącznik był rozwarty, wejście mikrokontrolera zbierałoby szumy i stan na nim byłby przypadkowy.
Rezystor sprawia, że gdy microswitch jest rozwarty występuje na wejściu stan wysoki, a gdy zostaje zwarty, stan przechodzi w niski (połączenie Pull-up).
Poniżej zamieszczam program w języku C, który realizuje obsługę przycisku. Po wciśnięciu microswitcha (podpiętego do PB0 bez rezystora, gdyż zastosowano programowy Pull-up), stan na pinie przechodzi na niski, co zostaje sprawdzone w nieskończonej pętli.Gdy warunek zostaje spełniony zapalana jest dioda (podpięta do PB1 anodą, a katodą przez rezystor do masy), w przeciwnym razie dioda zostaje wygaszona.
C
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
#include <avr/io.h>
DDRB&= ~(1<<PB0);//Przycisk jako wejście
PORTB|=(1<<PB0);//Wewnętrzny pull-up
DDRB|=(1<<PB1);//LED jako wyjście
PORTB&= ~(1<<PB1);//LED wyłączona
while(1){
if(!(PINB& (1<<PB0))) {
PORTB |= (1<<PB1);//LED włączona
}else{
PORTB&= ~(1<<PB1);//LED wyłączona
}
}
Załączam także program napisany w Bascom'ie.
Visual Basic
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
$regfile="m8def.dat"
$crystal=1000000
PRZYCISK AliasPortb.0
LED AliasPortb.1
Config PRZYCISK=Input
Config LED=Output
SetPRZYCISK
Reset LED
Do
IfPINB.0=0Then
SetLED
EndIf
IfPINB.0=1Then
Reset LED
EndIf
Loop
End
Drgania styków i ich eliminacja
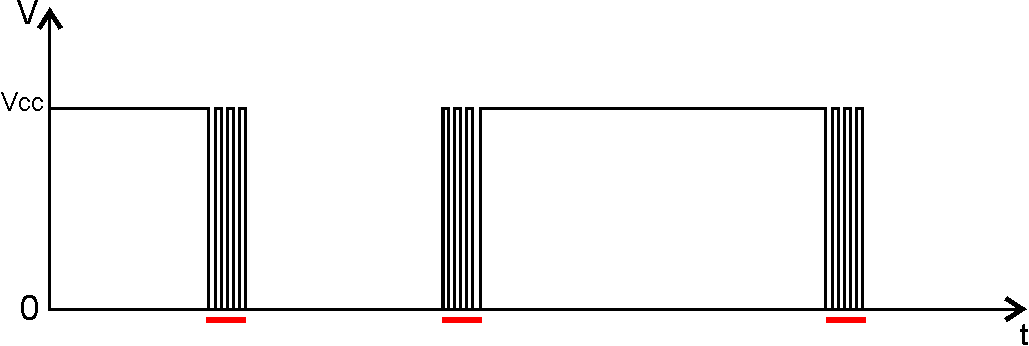
Microswitche i krańcówki są elementem mechanicznym, zatem warunki fizyczne silnie na nie oddziałują np.: śniedź, zużycie mechaniczne, wilgoć, sprężystość metalu, odkształcenia. Wszystko to sprawia, że podczas zmian stanu przełącznika powstają niechciane zakłócenia (drgania styków), które zamiast ładnego przebiegu prostokątnego tworzą przebieg widoczny poniżej:
Uproszczony przebieg zmian stanów na przycisku z uwzględnienie „drgań styków”.
W praktyce efekt ten zaobserwować najlepiej na prostym przykładzie. Wyobraź sobie program, który ma zliczać wciśnięcia przycisku (czujnika). Każde wciśnięcie, ma zwiększyć wartość zmiennej licznikowej o 1. Jeśli układ nie będzie zabezpieczony przed drganiami styków, po jednokrotnym "kliknięciu" przyciskiem zmienna zostanie zwiększona, nie raz, a kilka. Dlaczego? Spójrz na powyższy wykres. Mikrokontroler sprawdza stan swoich wejść baaaardzo szybko. Bez problemu będzie mógł policzyć zakłócenia jako osobne wciśnięcia przycisku.
Jest to efekt niepożądany, możliwa jest jego eliminacja w dwojaki sposób:
sprzętowa,
programowa.
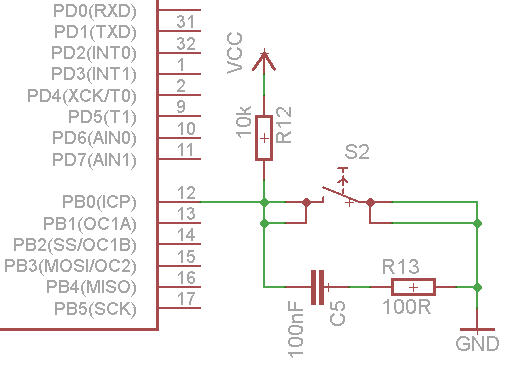
Sprzętowa eliminacja polega na wstawieniu pomiędzy nóżki krańcówki rezystora około 100 Ohm oraz kondensator o pojemności około 100nF. Zakłócenia powstałe podczas drgania styków charakteryzują się dużą częstotliwością, co wymaga użycia kondensatora o niewielkiej pojemności. Na schemacie poniżej przedstawiono sprzętową eliminację drgań styków:
Podstawowy sposób na sprzętową niwelację drgań styków.
Powyższy schemat jest jedną z możliwych implementacji filtru RC.
Programowa eliminacja drgań polega na sprawdzeniu stanu wejścia i odczekaniu, krótkiego czasu (20- 80ms) aż drgania ustaną. Realizację w dowolnym języku należy wykonać zgodnie z poniższym algorytmem:
C
1
2
3
4
5
6
7
8
9
10
if(WcisnietoPrzycisk){
_delay_ms(20);//Czekamy 20ms
if(WcisnietoPrzycisk){
//Wciśnięto przycisk
//Wykonujemy właściwą akcję
}else{
//Fałszywy alarm, drgania styków
}
}
Podsumowanie
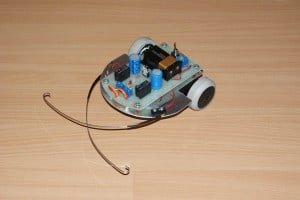
Nawet proste i tanie elementy mogą być wykorzystane w roli czujników. Podłączenie dwóch krańcówek z odpowiednimi "wąsami" wystarczy, do stworzenia prostego robota, który będzie omijał przeszkody. Nie można zapomnieć, że microswitche są też idealnym interfejsem do komunikacji z robotem (wybór ustawień, start, stop). Co najważniejsze, w obu przypadkach trzeba być świadomym występowania drgań styków, ponieważ mogą one prowadzić do nieprzewidywalnych zachowań.
Przykładowy robot z dwiema krańcówkami w roli czujników (kliknij, aby przeczytać opis):
Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.

















Trwa ładowanie komentarzy...