Kiedy Kiloboty debiutowały w 2011 roku było ich tylko 25. W 2013 liczba ta zwiększyła się do 100. Jednak dopiero teraz nazwa KILObotów ma sens, teraz jest ich ponad tysiąc.
Pojedynczy Kilobot kosztuje 14 dolarów, porusza się wibrując nóżkami, a do komunikacji wykorzystuje podczerwień.
W robotyce roju zwykle spotyka się niewielkich ilości robotów: 5, 10, czasami 100. Grupa Kilobotów liczy 1024 osobników. Niestety generuje to problemy, które przy mniejszych grupach są pomijalne. Jednak z drugiej strony przy tej ilości robotów awaria jednego nie jest problematyczna.
Konstruktorzy musieli rozwiązać kilka elementarnych problemów. Pierwszym z nich było ładowanie wszystkich robotów. Dostarczanie energii do każdego z osobna zajęłoby zbyt dużo czasu. Naukowcy ładują więc wszystkie Kiloboty na raz – skupiając je pomiędzy dwiema metalowymi płytami, przez które przepuszczany jest prąd.
Natomiast jeśli chodzi o programowanie, to gotowy wsad jest przesyłany pomiędzy jednostkami przez podczerwień.
Rozwiązania te są genialne w swej prostocie, szczególnie że dodawanie kolejnych osobników nie tworzy nowych problemów!
Wykorzystanie potęgi roju
Co można zrobić z tak wielkim rojem? Sprawdźcie poniższą prezentacje:
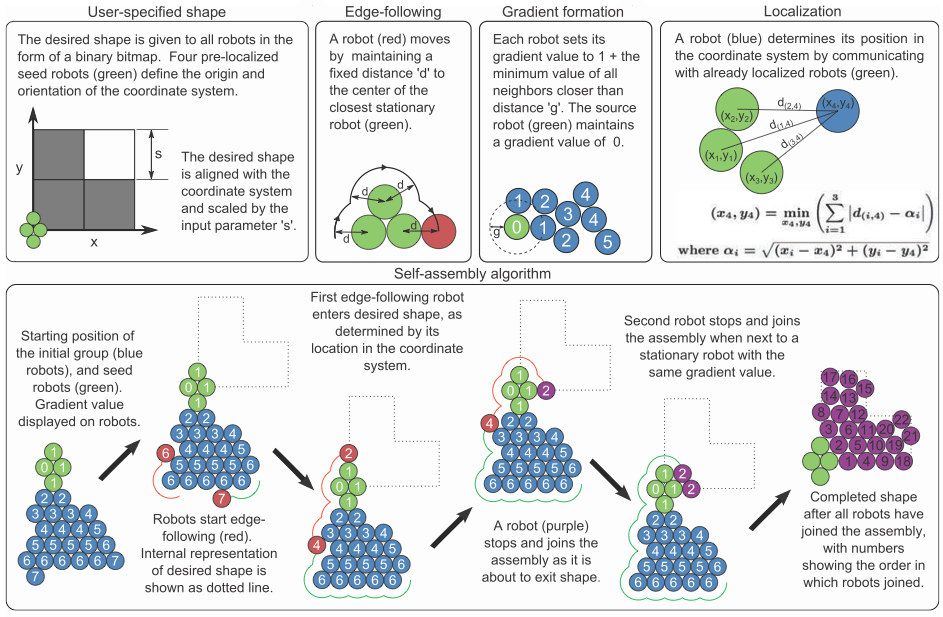
Roje żywych stworzeń organizują się w oparciu o zbiory prostych zasad. Na przykład w ławicach, ryby starają się trzymać jak najbliżej tych z przodu, jednocześnie skręcając w stronę najbliższego sąsiada z boku. Z Kilobotami jest podobnie – algorytm za pomocą którego tworzą różnorakie figury oparty jest na poniższym zestawie funkcji:
Poruszanie się wzdłuż krawędzi – osiągnięte poprzez mierzenie odległości między robotem poza krawędzią, a robotami tę krawędź stanowiącymi
Formacja gradientu – robot-źródło może wygenerować informację o wartości gradientu wzrastającej podczas rozchodzenia się przez rój, dając każdemu robotowi geodezyjną odległość od źródła
Lokalizacja – roboty potrafią określić swoje koordynaty poprzez pomierzone odległości i komunikację z sąsiednimi jednostkami
Z tego wszystkiego najtrudniejsza i najważniejsza jest lokalizacja. Kiloboty rozpoznają jak daleko są ich sąsiedzi po ilości odebranego światła podczerwonego. Nie wiedzą jednak, skąd światło to pochodzi. Aby dokładnie określić swoje położenie, rój polega na grupie źródłowej, będącej punktem odniesienia. Jak to wszystko działa pokazuje poniższy schemat:
Jak sami mogliście zauważyć, mimo licznych problemów wszystko działa doskonale. Teraz czekamy na większe roje Kilobotów! Jakie macie propozycje na dalszą rozbudowę tej grupy? Zwiększenie ilość robotów, zmniejszenie ich rozmiarów?
Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




















Trwa ładowanie komentarzy...