Dzisiejsze konstrukcje robotów posiadają wiele sensorów monitorujących otoczenie jak również pracę samego urządzenia. Według autora projektu nadal mało rozwiązań pozwala jednak na "zobaczenie prawdziwego świata". Rozwiązaniem tego problemu ma być Hicat.livera.
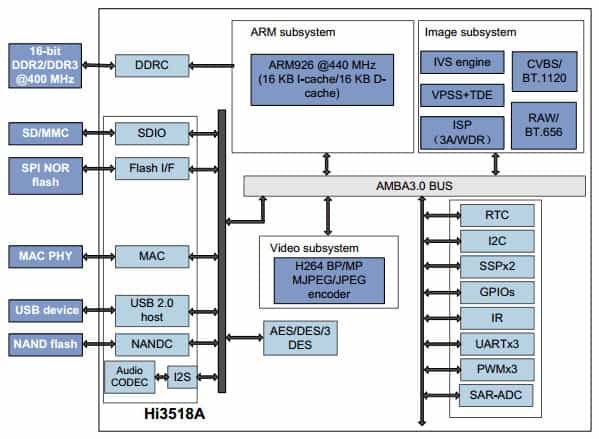
Wspomniany projekt, to płytka prototypowa, która wyposażona jest w układ Hi3518 firmy Hisilicon oraz jedno-rdzeniowy procesor ARM926 taktowany częstotliwością 440 MHz. Dodatkowo na płytce znajduje się dobrze znany (z Arduino) mikrokontroler ATmega32U4 firmy Atmel.
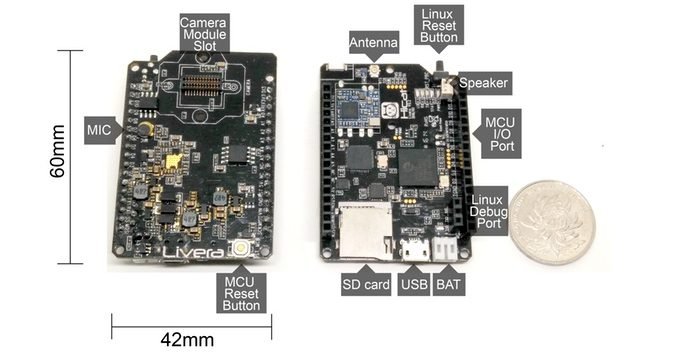
Opis najważniejszych elementów Hicat.livera
Płyta posiada 512MB/1GB pamięci RAM DDR3 (w zależności od konfiguracji) oraz 4GB pamięci flash eMMC. Nie mogło zabraknąć wyprowadzeń: GPIO, PWM, UART, I2C i SPI. Łączność Wi-Fi zapewnia układ MT7601 firmy Mediatek.
Oprócz wspomnianych interfejsów na płytce znajduje się port micro-USB, slot na kartę microSD, akcelerometr-żyroskop (MPU-6050), mikrofon oraz głośnik. Układ posiada złącze modułu kamery Omnivision OV9712.
Całość obsługiwana jest przez dystrybucję Linuxa, która umożliwia uruchomienie biblioteki OpenCV służącej do przetwarzania obrazu.
Przykład wykorzystania kamery z Hicat.livera
Wymiary płytki wynoszą ~60x42 mm. Cena układu zaczyna się od 49$. Do tej pory zebrano ponad 30 tys. dolarów, więc cel zbiórki został już osiągnięty.
Autor: Jacek Piechociński Redakcja: Damian Szymański
Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.


















Trwa ładowanie komentarzy...