Ważący 100 g Salto, to najzwinniejszy na świecie mechaniczny robot bez uwięzi. Zwinność w tym przypadku odnosi się nie tylko do wysokości pojedynczego skoku, ale także do częstotliwości skoków wykonywanych jeden po drugim.
Przykładowo, galago potrafi skakać na wysokość 1,7 m, co 0,78 s, a zatem jego zwinność wynosi 2,2 m/s. W przypadku Salto jest to 1,7 m/s – skacze on na wysokość 1 m, co 0,58 s.
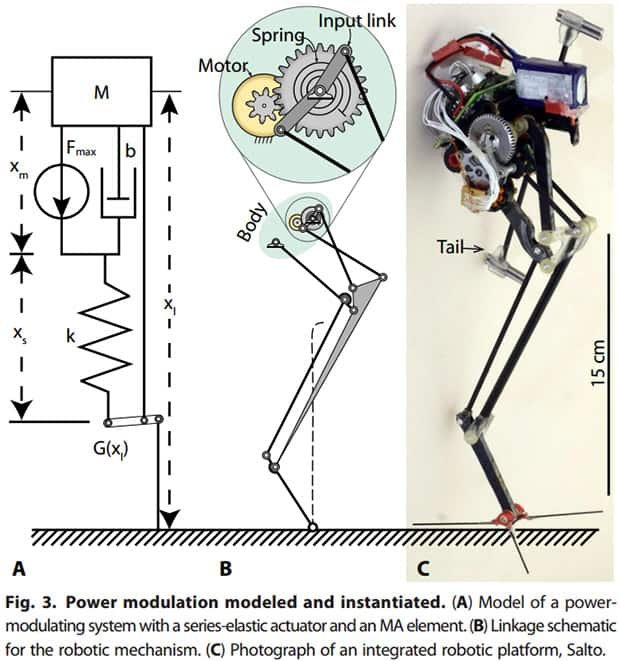
Robot posiada siłownik liniowy, pozwalający m.in. na modulację mocy. Dzięki elastycznemu elementowi energia może być magazynowana przez długi czas, a potem szybko uwolniona.
System modulacji mocy w robocie Salto: (A) model, (B) schemat, (C) fotografia.
U zwierzęcia funkcję sprężystego elementu pełnią mięśnie i ścięgna. Jednak nie tylko one są powodem zwinności galago. Budowa nogi oraz technika skoku sprawiają, że moc dodatkowo zwiększa się nawet 15 razy.
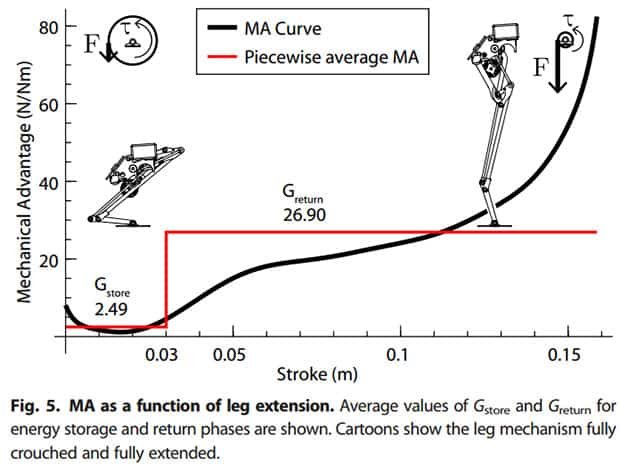
Przełożenie mechaniczne podczas rozprostowywania nogi.
Dzieje się tak dzięki temu, że przełożenie mechaniczne jest niskie, gdy robot (lub zwierzę) przykuca i rozpoczyna skok, a potem nagle rośnie, gdy noga prostuje się.
Im dłuższy kontakt z powierzchnią przed wybiciem się, tym lepszy rezultat.
W przypadku Salto wystarcza dodatkowe 60 milisekund.
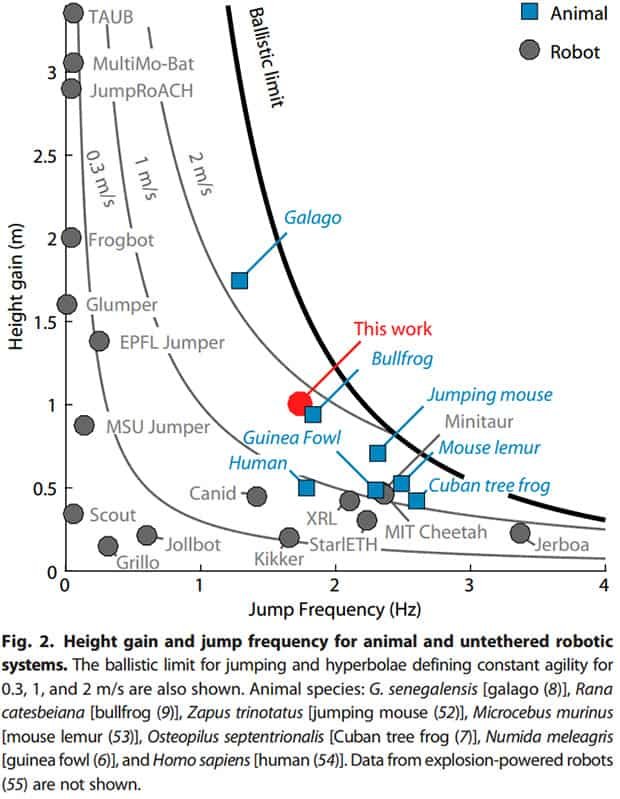
Wysokość i częstotliwość skoków robotów i zwierząt (m.in. galago i człowieka). Salto plasuje się na poziomie żaby ryczącej.
Na razie robot posiada jedną nogę. Ma także niewiele sensorów i nie przystosowuje się samodzielnie do różnych powierzchni. M.in. te zagadnienia, a także koordynacja kilku kolejnych skoków, będą przedmiotem pracy konstruktorów w przyszłości.
Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.

















Trwa ładowanie komentarzy...