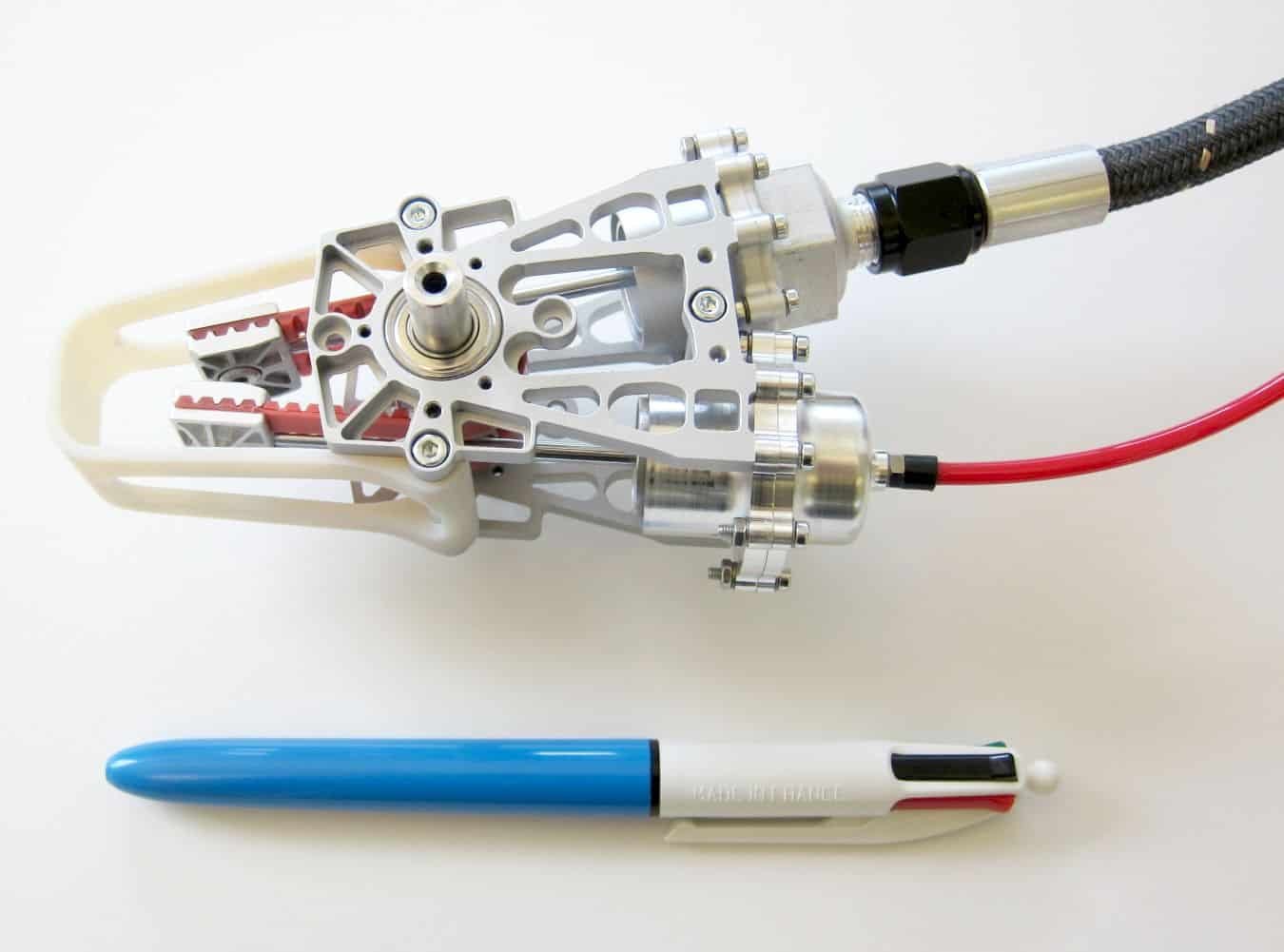
Zaletą tego rozwiązania jest m.in. fakt, że kończyny robota mogą być cienkie i lekkie, ponieważ nie muszą zawierać silników ani serwomechanizmów, a nawet żadnych części metalowych. Współczynnik tarcia jest bardzo niski, a konserwacja urządzenia jest łatwa i szybka.
Z drugiej strony pojawiły się też nowe wyzwania, np. ciągłe sprawdzanie ciśnienia płynów.
Przewody hydrauliczne doprowadzane do siłownika są elastyczne, a pozycja przekładni może być zmieniona bez udziału mechanizmu (np. ręcznie), co gwarantuje bezpieczeństwo. Siłownik waży 120 g, a stosunek momentu obrotowego do masy jest korzystniejszy niż w przypadku tradycyjnych konstrukcji.
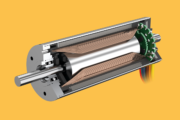
Siłownik. Czarna rurka zawiera wodę, a czerwona powietrze.
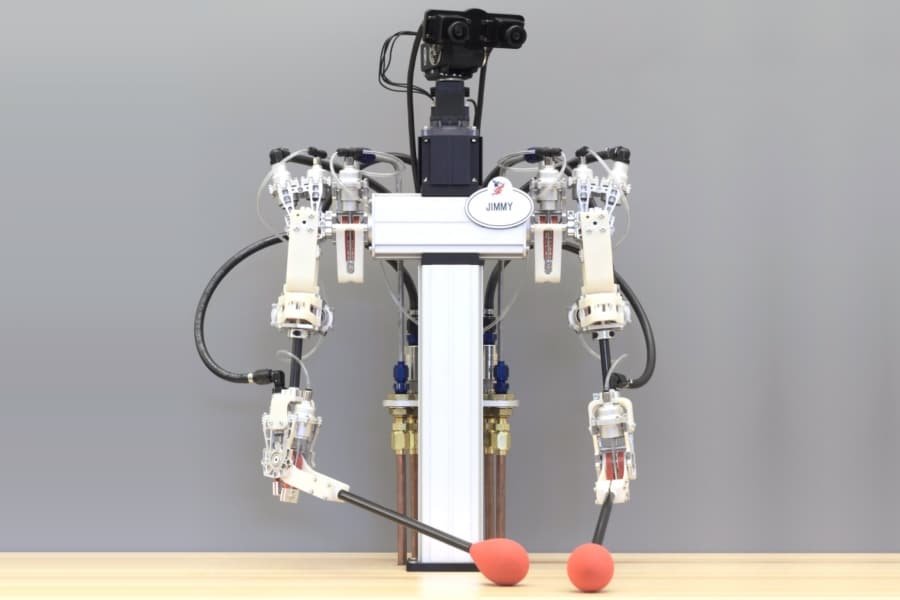
Na razie do obsługi Jimmy'ego niezbędny jest człowiek-operator. Replika robota poruszana przy pomocy ruchów rąk i głowy służy jako urządzenie sterujące. Rurki z wodą i powietrzem przekazują siły w obie strony.
Człowiek nie tylko kontroluje ramiona robota, ale także odczuwa poprzez dotyk, gdy maszyna czegoś dotknie. Na głowie robota znajduje się także kamera stereo, która przekazuje obraz operatorowi.
W przyszłości człowieka zastąpić mogą silniki oraz odpowieni system kontroli, a Jimmymoże stać się całkowicie autonomiczny.
Szybki, a zarazem płynny i delikatny dotyk robota oznacza, że nie musi on unikać kontaktu z człowiekiem. Co więcej, może być celowo użyty np. w medycynie. Nie znamy jeszcze przyszłych zastosowań maszyny, ale można założyć, że nie ograniczą się one do rozrywki w Disneylandzie.
Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.


















Trwa ładowanie komentarzy...