


falaat
-
Zawartość
8 -
Rejestracja
-
Ostatnio
Osiągnięcia użytkownika falaat
")




-
Czym chcesz sterować predykcyjnie, od tego też będzie zależała literatura ?
-
Konkurs na projekt z mikrokontrolerem STM32
falaat odpisał w temacie użytkownika Treker • Zawody/Konkursy/Wydarzenia
Tym bardziej że np w konkursie Analog Devices: http://www.mikrokontroler.pl/content/konkurs-uniwersytecki-firmy-analog-devices Konkurs podzielony został na dwie kategorie, nazwane: „Design Contest” i „Lab/Learning Academic Contest”. W pierwszej kategorii „Design Contest” pracami konkursowymi mogą być projekty urządzeń wykorzystujące układy elektroniczne firmy Analog Devices. Zgłoszenia konkursowe powinny zawierać krótki opis (abstrakt) projektu oraz spis użytych w projekcie układów firmy Analog Devices. Nie ma wymogu pełnej dokumentacji. Pewnie Kamami szuka inspiracji, ale pełna dokumentacja to pójście na skróty. -
Konkurs na projekt z mikrokontrolerem STM32
falaat odpisał w temacie użytkownika Treker • Zawody/Konkursy/Wydarzenia
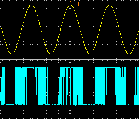
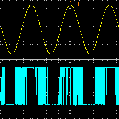
Witam, nie podoba mi się w zasadach tego konkursu to że muszę udostępniać pełna jego dokumentację. Szkoda, że organizatorowi nie wystarczy dokładny opis, zdjęcia, idea działania filmik. Byłem współautorem jednego urządzenia na STM32F1 (Elektryczny pojazd balansujący, taki ala segweay), i jednego autorem tj. Falownik napięcia na STM32F4. Napracowałem się przy tym i szkoda mi udostępniać kod programu i pcb. To tylko moja opinia. Czy każdy z was używa do konfiguracji biblioteki standardowe? -
Jeśli chodzi reg. P to z zasady jego działania wynika, że charakteryzuje się ustalonym uchybem, czyli Twoje symulacje są poprawne. Przecież żeby uchyb osiągnął zerową wartość to na wyjściu regulatora także było by 0 czyli żadna energia nie była by dostarczana do obiektu regulacji. Uchyb ustalony dla przebiegów liniowych usunie regulator PI, a dla liniowo narastających regulator PID. Nie istnieje złota recepta, że "Regulator PID sprawdza się wszędzie". PID nie nadaje sie wszędzie, ponieważ z racji posiadania członu różniczkującego D, może wzbudzać oscylacje w obiekcie regulacji. Przykładem są silniki indukcyjne sterowane metodą wektorową DFOC, w obwodach regulacji prądów stosuje się tam regulatory typu PI, a nie PID bo wzbudzały by one oscylacje. A do symulacji polecam Simulinka.
-
[Dla początkujących] Akumulatory litowo-polimerowe, Li-po, Lipol - kompendium
falaat odpisał w temacie użytkownika KD93 • Artykuły użytkowników
Dzięki za odpowiedź. Ja doskonale zdaję sobie sprawę, że to zależy od pojemności C. Nie mogę też zwiększać pojemności C w nieskończoność. Na razie to są moje tylko takie dywagacje. Pojazd pobiera prądy po 30 A na silnik czyli razem 60A więc pewnie nawet nie znajdę takich baterii. Chciałbym w przyszłości zastąpić akumulatory ołowiowe czymś bardziej pojemnym i pozwalającym na szybsze naładowanie. -
[Dla początkujących] Akumulatory litowo-polimerowe, Li-po, Lipol - kompendium
falaat odpisał w temacie użytkownika KD93 • Artykuły użytkowników
Wypadało by pewnie w takim razie połączyć tą diodę i super kondensator. Z tym, że dla bezpieczeństwa jeśli silnik będzie się znajdował dosyć długi czas w pracy generatorowej istnieje prawdopodobieństwo, że przekroczy się napięcie na jego zaciskach, stąd pomyślałem, że warto było by w tym czasie przekazać tą energię do bateri LI-POL. Wtedy unikało by się doładowywania baterii przy zwykłych nawrotach,ale jeśli napięcie na super kondensatorze wzrośnie ponad pewną wtedy energia jest przekazywana do baterii. Czy jest to dopuszczalne ? Jeśli taki sposób nie jest dopuszczalny to trzeba by zmarnować ta energię na ciepło tak jak w falownikach z mostkiem diodowym. Poniżej wstawiam schemat: Dławik został wstawiony by ograniczyć chwilowy prąd ładowania. Przykładowe symbole elementów są przypadkowe. -
[Dla początkujących] Akumulatory litowo-polimerowe, Li-po, Lipol - kompendium
falaat odpisał w temacie użytkownika KD93 • Artykuły użytkowników
Witam, czy poprzez łącznie tych akumulatorów w większe pakiety można nimi zasilać większe silniki elektryczne? W zasadzie chodzi mi o to czy te litowo-polimerowe baterie wytrzymają zwroty energii przy hamowaniu lub nawrotach ? Dzięki za odpowiedź -
[KwikStik K40] Czy warto kupić ten zestaw?
falaat odpisał w temacie użytkownika byxu • Mikrokontrolery
Witam, w tym zestawie mikrokontroler K40 nie ma wbudowanego FPU, to okrojona wersja Cortex M4F. Ja używam aktualnie STM32F4Discovery, który ma na pokładzie mkrokontroler STM32F407VG z rdzeniem M4F czyli z wbudowanym FPU.