mcwo82
-
Zawartość
94 -
Rejestracja
-
Ostatnio
-
Wygrane dni
3
Osiągnięcia użytkownika mcwo82
")





-

Jakie silniki do mini sumo z poradniki zamiast Pololu ?
mcwo82 odpisał w temacie użytkownika EasyPeasy_ • Zupełnie zieloni
Trochę odświeżę wątek. Ostatnie moje minisumo zrobiłem w 2014 roku, kiedy królowały silniki pololu. Co teraz jest takim 'must have' żeby mieć szansę na podium? Jakiś czas temu kojarzę że ktoś polecał silniczki z firmy faulhaber, ale nie pamiętam modelu. A może jeszcze jakieś inne? -
Minisumo StealthMamut - niewidzialny robot MiniSumo
mcwo82 odpisał w temacie użytkownika mcwo82 • Projekty - DIY roboty
@Treker @jas123 Dzięki! 🙂 @ethanak Dzięki za odpowiedź. Mam pytanie, co rozumiesz przez zmiana kształtu obudowy? Wydaje mi się, że wybrany przez nas kształt jest blisko optymalnego... Odnośnie czujników to w czasach jak robot był budowany to królowały sharpy GP2Y0D340K i nie było nic lepszego pod względem dokładności i szybkości. Btw. tak na szybko spojrzałem i widzę że te VL53L1X też nie są tak szybkie jak sharpy. Pozdrawiam. Maciek -
Minisumo StealthMamut - niewidzialny robot MiniSumo
mcwo82 opublikował temat w Projekty - DIY roboty
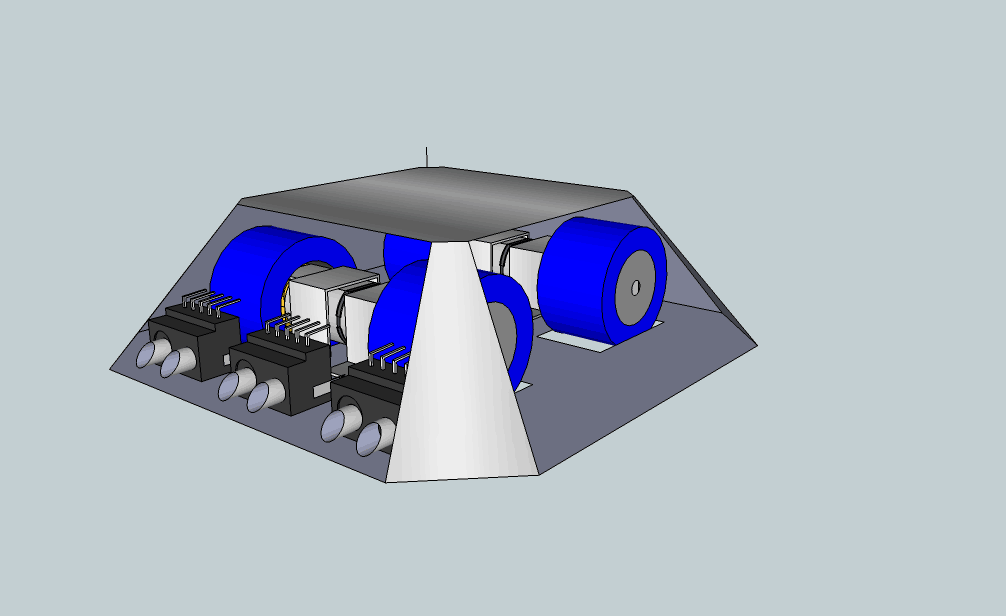
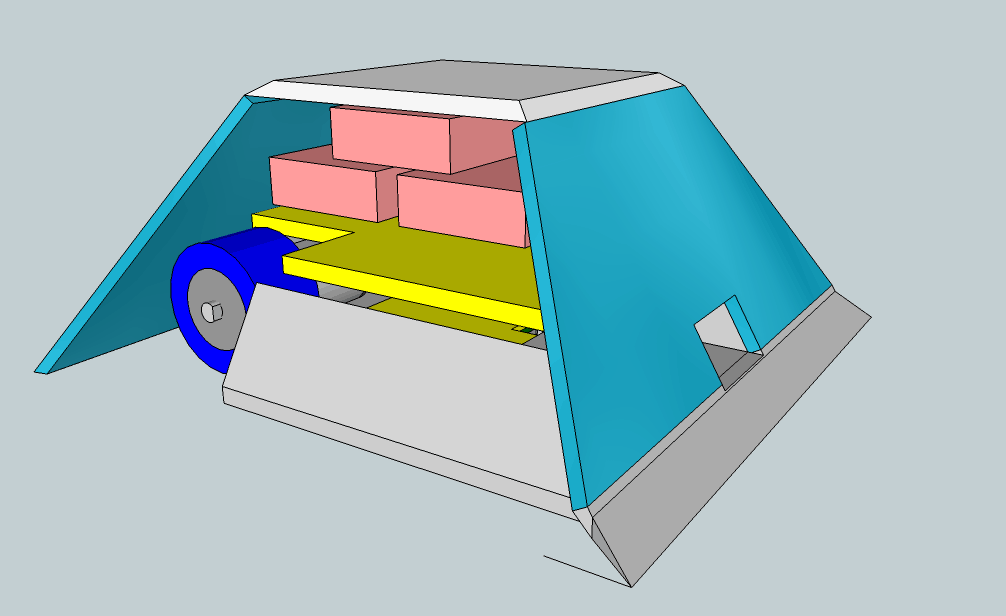
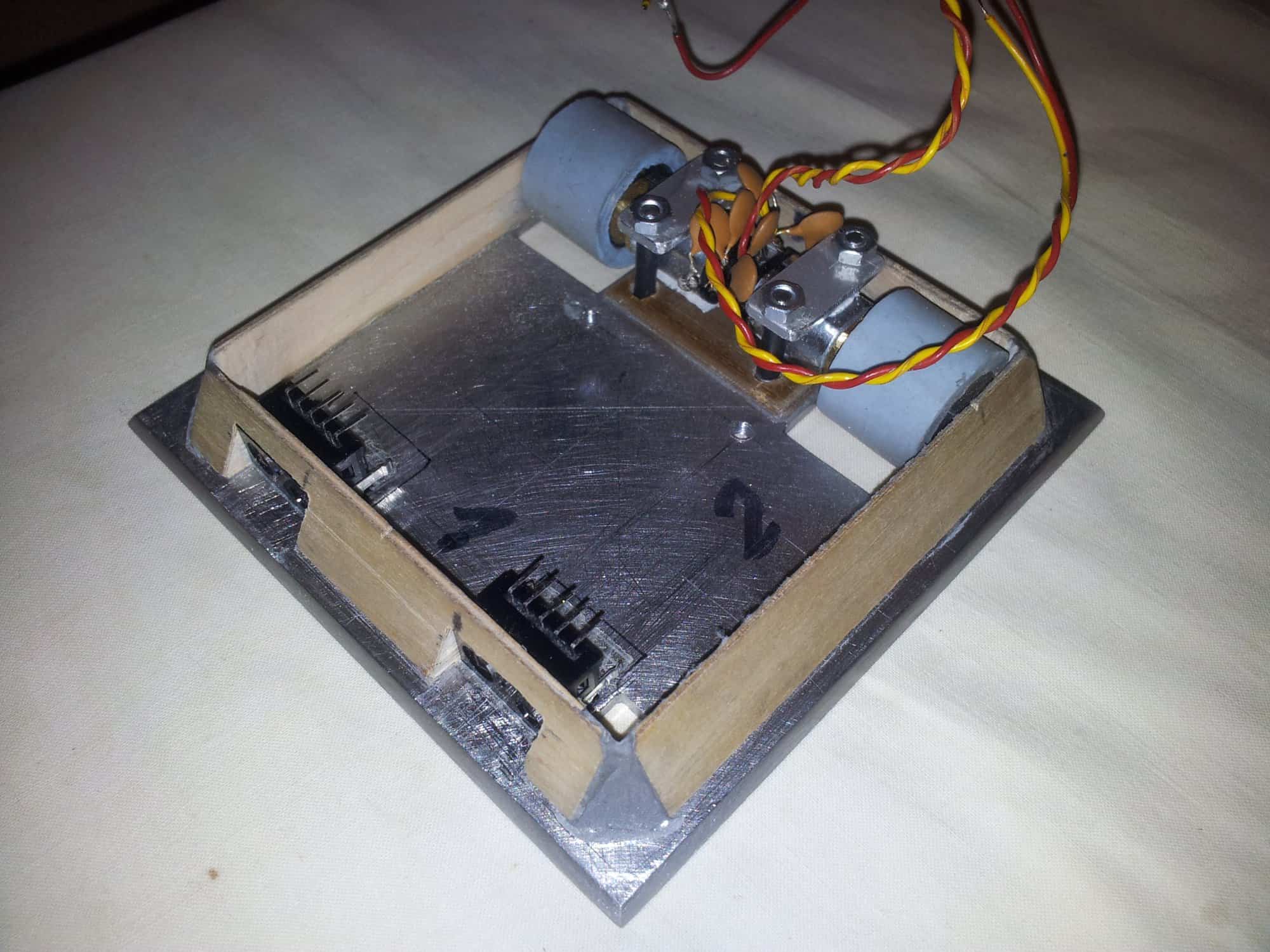
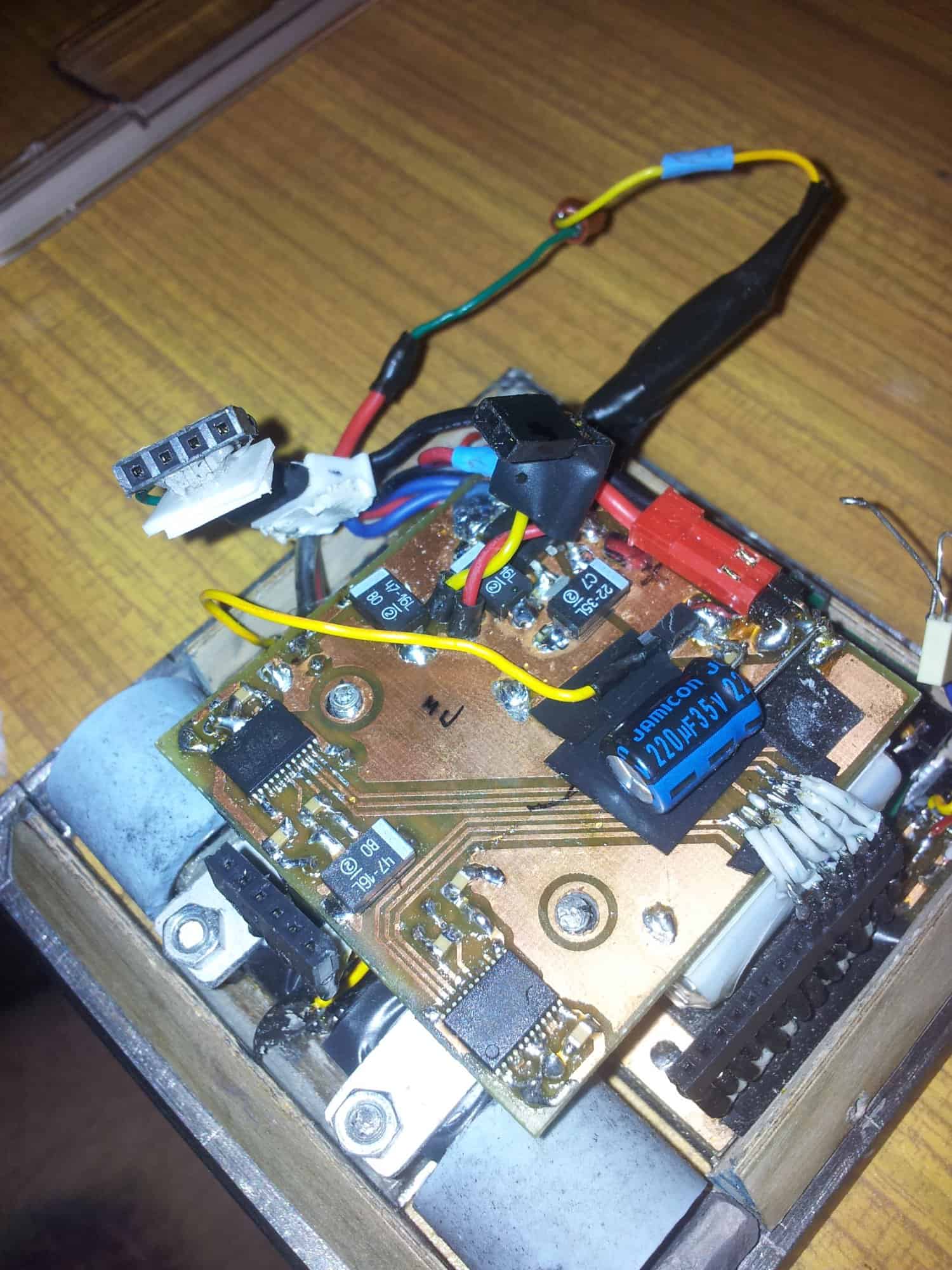
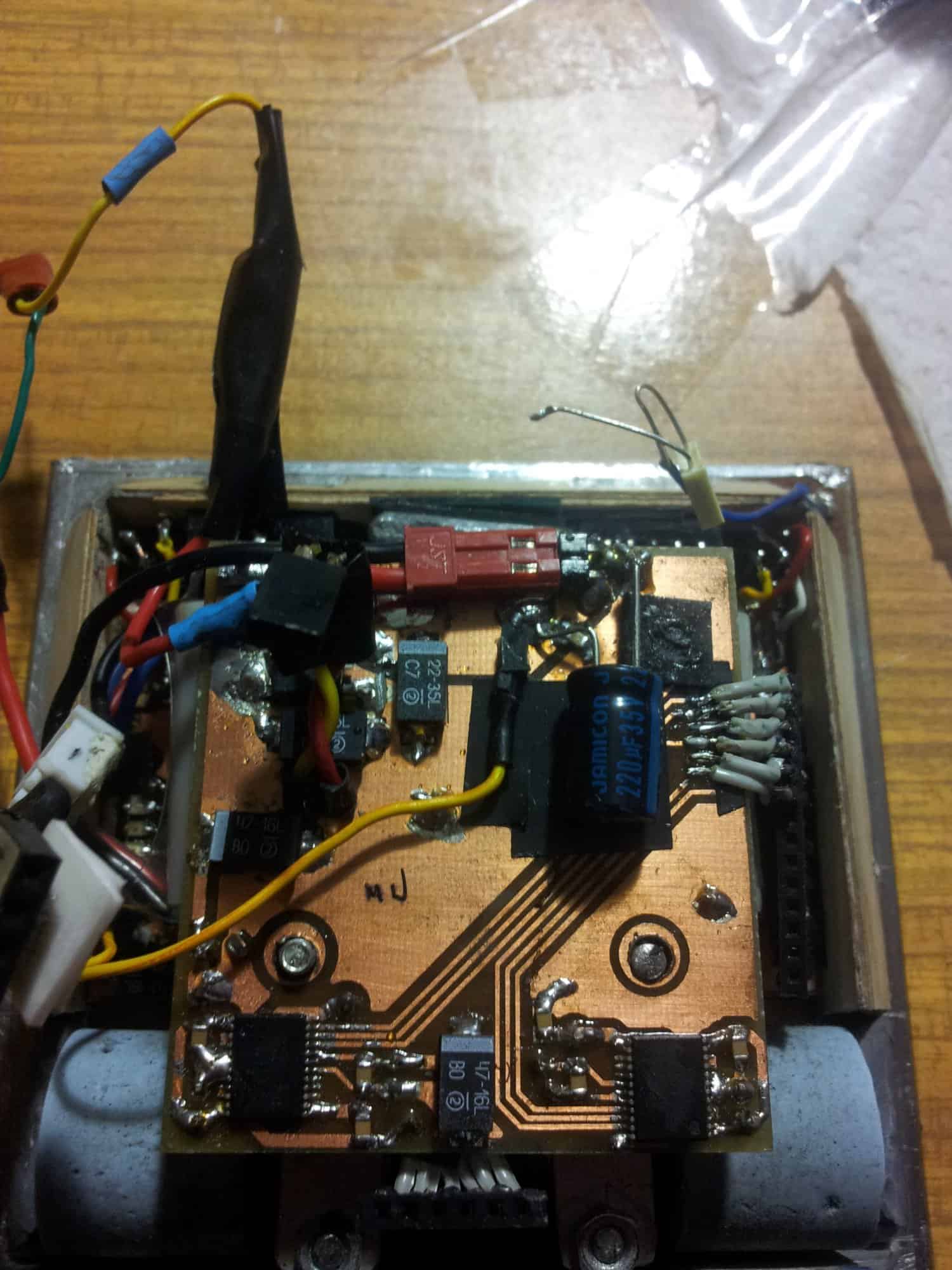
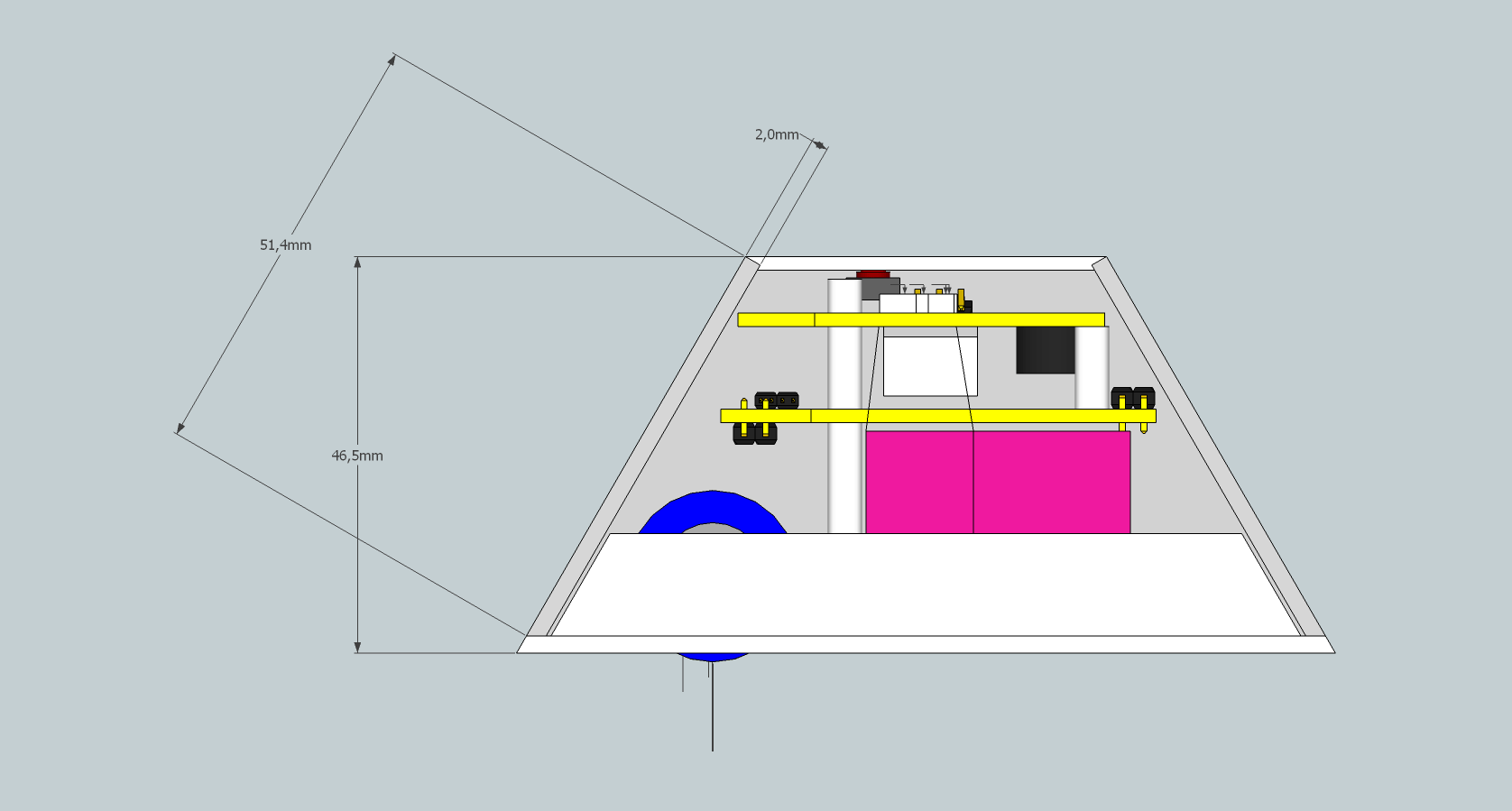
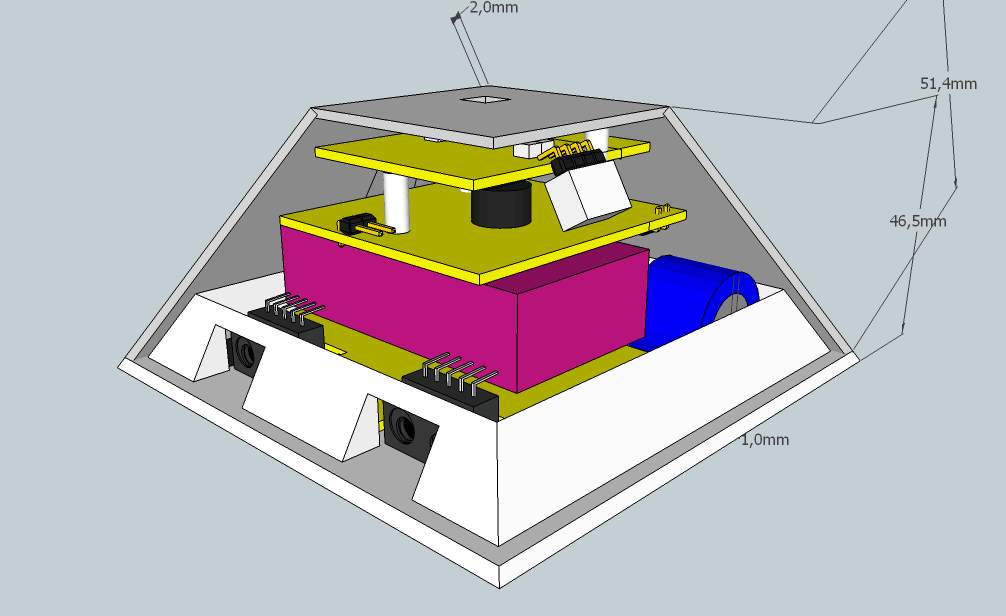
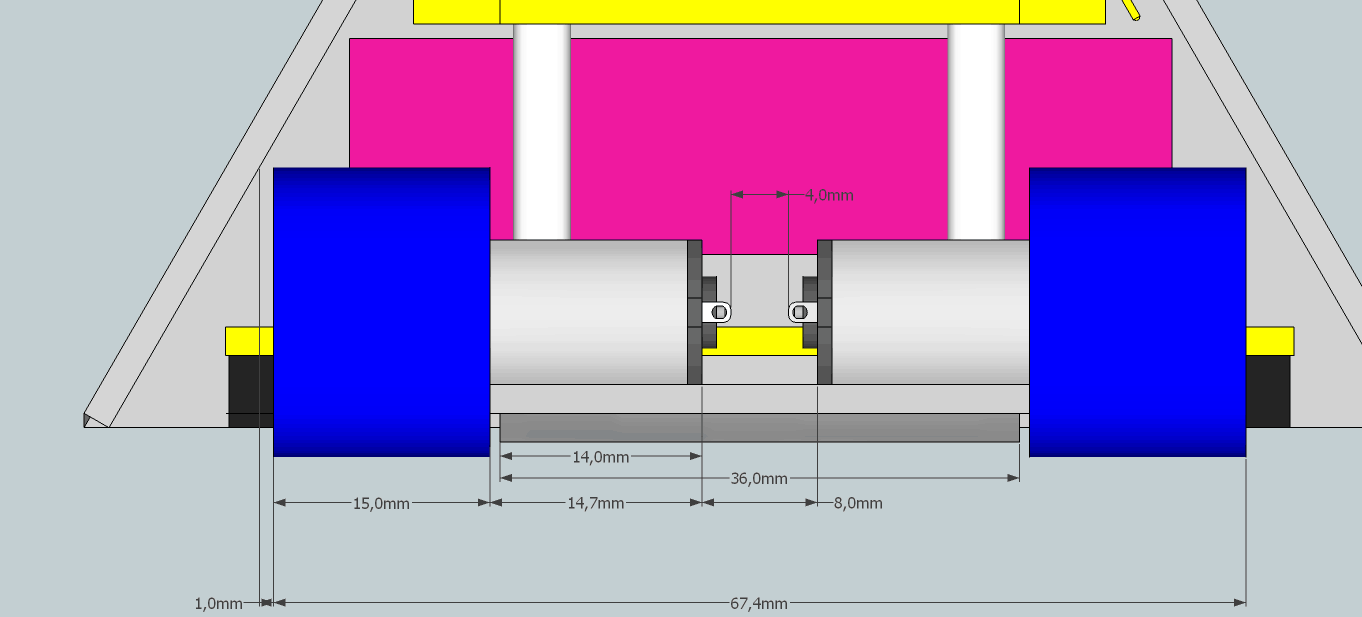
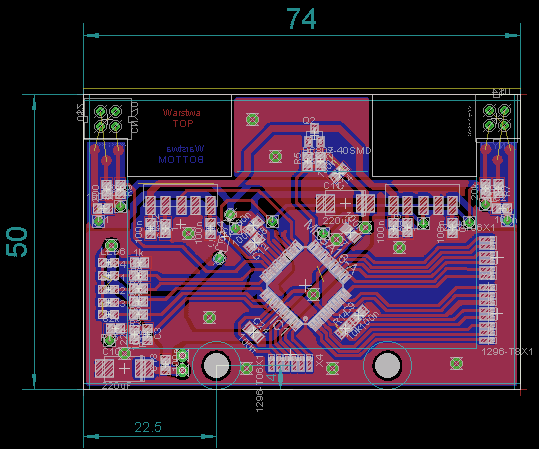
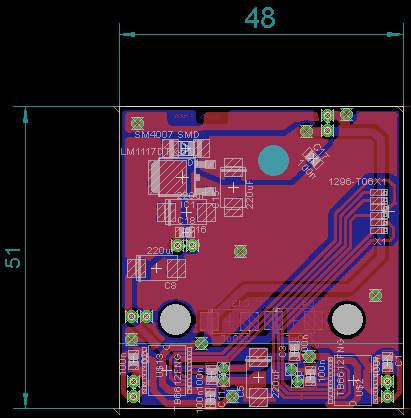
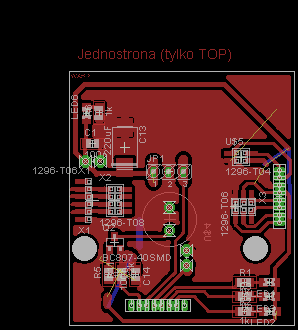
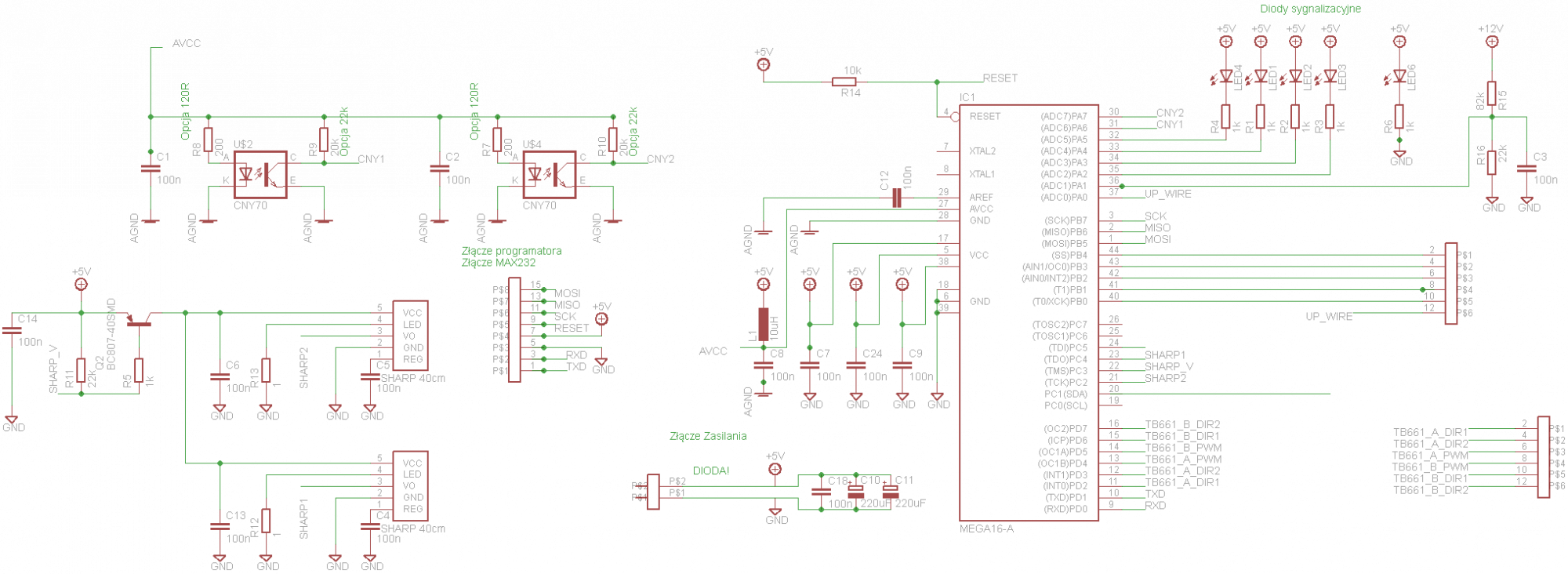
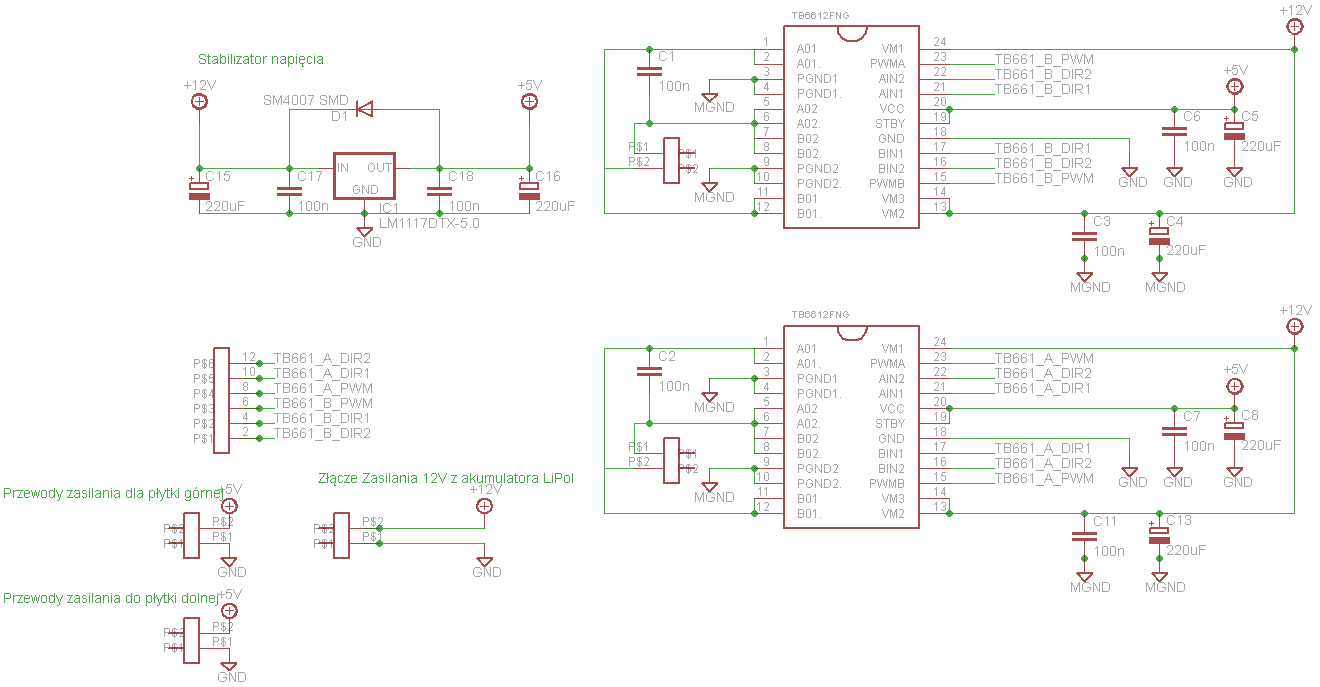
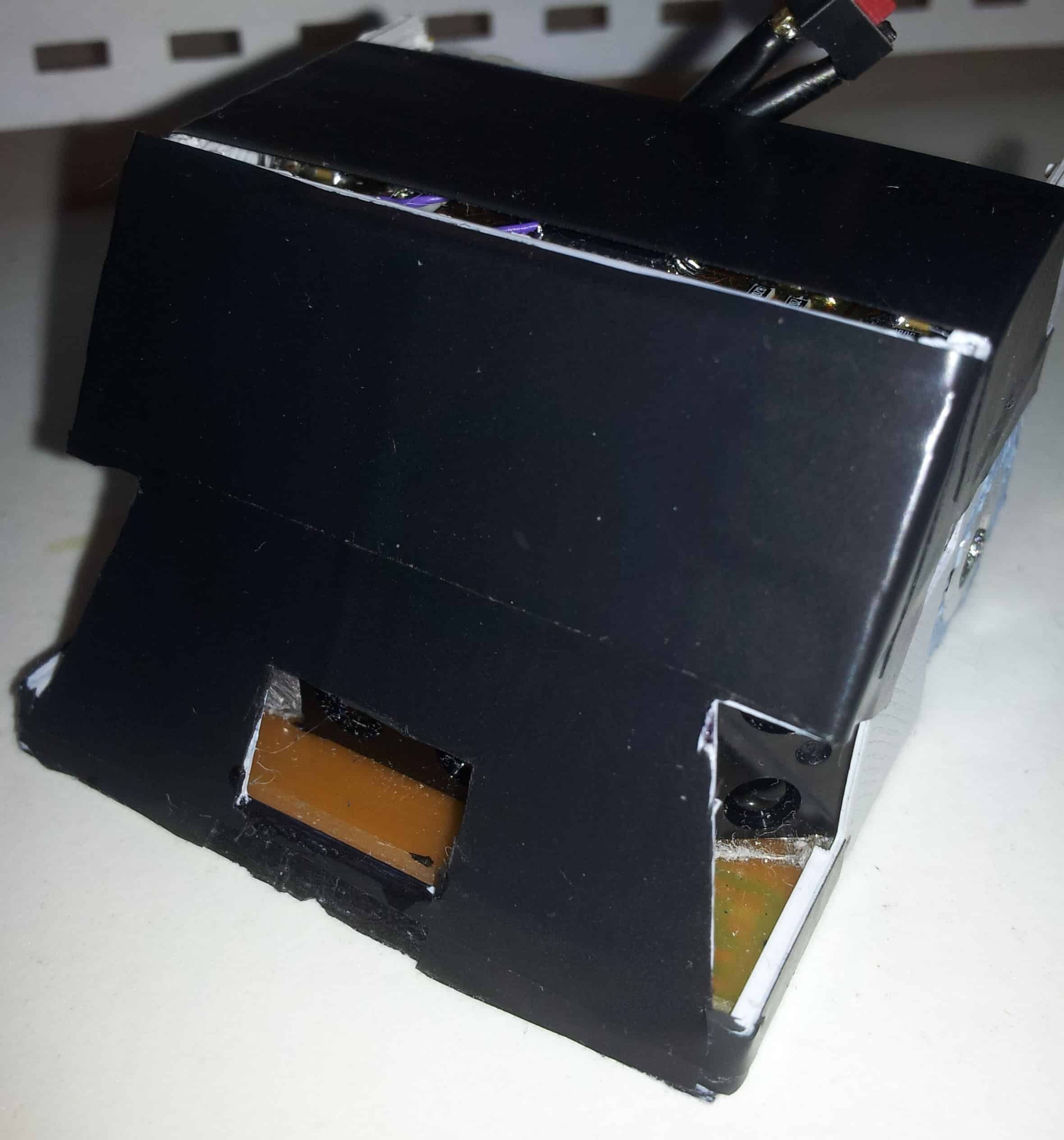
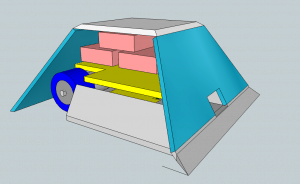
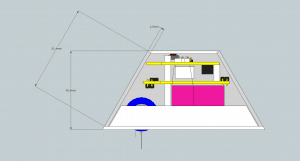
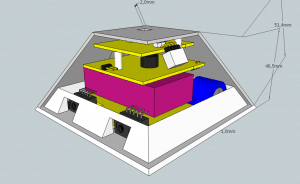
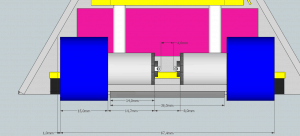
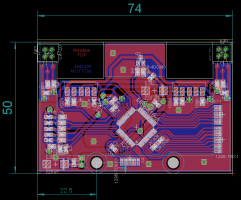
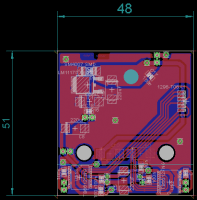
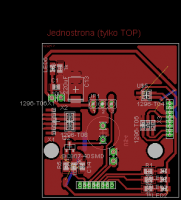
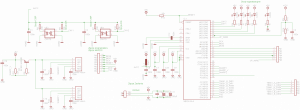
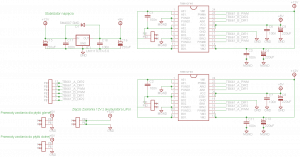
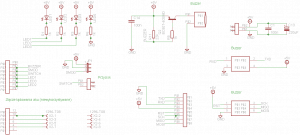
StealthMamut to nasz drugi robot minisumo. Robot startował na zawodach ze zmiennym szczęściem. Ale miał swoje chwile chwały 😊 Największe sukcesy to 2 miejsce w Rzeszowie oraz 1 miejsce na RA w 2014 roku. Od konceptu do realizacji U początku całej koncepcji znalazł się pomysł, żeby zbudować robota, który będzie słabo wykrywalny przez czujniki przeciwnika, czyli technologia znana jako Stealth 😊 Pierwsze testy polegały na sprawdzeniu sposobu reakcji czujników Sharp (najpopularniejsze) gdy skierujemy je pod kątem ok. 45 stopni na lustro. Zgodnie z przewidywaniem promienie były odbijane przez lustro i czujnik lustra nie wykrywał. Zrozumieliśmy, więc że robot z obudową w kształcie piramidy z luster ustawionych pod kątem będzie odbijał promienie czujników i będzie teoretycznie w 100% niewidoczny. Pierwszy projekt powstał w sketchupie na wiosnę 2013 i był to 4 kołowy robot, z 4 silnikami, 3 czujnikami Sharp GP2Y0D340K. Bryła robota byłą w kształcie ściętego ostrosłupa o podstawie ośmiokąta. Projekt ten był ciekawy, natomiast bardzo trudny w realizacji. Dlatego zawiesiliśmy prace i pomysł musiał dojrzeć. Pod koniec 2013 roku koncepcja zaczęła się krystalizować. Pierwszym krokiem było uproszczenie projektu o następujące założenia: Robot 2 kołowy z dwoma silnikami – dzięki temu było dużo więcej miejsca oraz odpadał problem docisku noża pojawiający się przy 2 osiach Tylko 1 czujnik przeciwnika Powstał kolejny projekt w Sketchupie, oraz film animowany prezentujący koncepcje: Aby projekt można było urzeczywistnić, kluczową sprawą było znalezienie dostawcy odpowiednich luster. Stanęło na lustrach z plexi z firmy Audioplex. Były one w miarę łatwe w obróbce i wytrzymalsze niż lustra szklane. Zakupiliśmy arkusz luster i okazał się on odpowiedni do naszych potrzeb. Gdy mieliśmy już materiał wykonany prototyp obudowy z zakupionych „luster”, tak aby sprawdzić skuteczność koncepcji Stealth. Okazało się, że koncepcja stealtch działa 😊 Oczywiście w praktyce prototyp nie był w 100% niewidzialny – szczególnie na krawędziach. Natomiast był na tyle niewidzialny że technologię uznaliśmy za wartą przeniesienia na prawdziwego robota. Robot został stworzony w rekordowo krótkim czasie kilku tygodni. Bardzo pomogły doświadczenia z poprzednimi robotami. W pierwszych kilku zawodach robot borykał się z chorobami wieku dziecięcego (zarówno mechanicznie jak i program), ale po kolei wszystko zostało dopracowane i mógł stanąć w szranki z najlepszymi. Projekt 3D Robot był od początku do końca szczegółowo zaprojektowany w 3D w programie SketchUp.. Względem projektu z końca 2013 dodaliśmy dodatkowy czujnik (w sumie 2 czujniki) oraz został wybrany akumulator (Dualsky). Zostało też zaprojektowane całe wnętrze tak aby sprawdzić czy wszystkie części na pewno się mieszczą. Po dopracowaniu projektu ogólnego, dolna stalowa podstawa została zaprojektowana w programie Inventor. Elektronika Podstawowe elementy wykorzystane w układzie to: Procesor Atmega 16 - sterowanie całym robotem 2 czujniki 40 cm Sharp GP2Y0D340K - czujniki przeciwnika ustawione na wprost. 2 czujniki linii – CNY70 - do wykrywania linii oczywiście. TB6612– dwa mostki dla silników głównych, sterowany sygnałami PWM z procesora Stabilizator napięcia LM1117 dla zapewnienia 5V zasilania dla układów. Ze względu na kształt robota, podzieliliśmy elektronikę na 3 płytki. Dla oszczędzenie miejsca zastosowaliśmy w większości elementy typu SMD. Płytka główna wypełnia przestrzeń w obudowie i jest bazą dla procesora oraz zapewnia złącza dla czujników linii. Diody na tej płytce wykorzystywane były tylko do celów testowych. W pierwotnej koncepcji zasilanie czujników miało być wyłączane w pewnych fazach walki tak aby czujniki nie emitowały wiązki i tym samym zdradzały pozycji. Okazało się jednak, że przy obecnym tempie walk dużo ważniejsza jest świadomość sytuacyjna niż jakikolwiek niewielki efekt wyłączenia czujników. Schemat głównej płytki poniżej: Środkowa płytka jest bazą dla mostków dla silników oraz stabilizatora. Schemat poniżej: W końcu górna płytka jest tylko bazą dla złącza programatora, przycisków, diod oraz głośnika. Ciekawa jest geneza wykorzystania głośnika. Ze względu na górną obudowę, która jest także z lustra nie widać na zewnątrz żadnych diod. Tak wiec aby wybrać program startowy używamy przycisku po naciśnięciu którego liczba piknięć głośnika mówi jaki program został wybrany. Oczywiście obecnie większość robotów ma tak nisko czujniki że nie omiata wiązką górnej powierzchni, ale 1 lub dwa takie się zdarzały. Dodatkowo użycie u góry lustra poprawia estetykę całego robota. Schemat górnej płytki poniżej: Generalnie elektronika spełnia dobrze swoje zadania, chodź można było na pewno jeszcze bardziej upchać elementy oraz zastosować lepsze taśmy to łączenia sygnałów pomiędzy poszczególnymi płytkami. Płytki PCB Płytki zostały wykonane w Eaglu. Ich wykonanie zostało zlecone do firmy, która wykonuje PCB, a lutowanie było już po naszej stronie. Najtrudniejszym elementem było przylutowanie procesora oraz mostków, ale udało się to zrobić. Łączenie pomiędzy płytkami zostało wykonane na taśmach z goldpinami i jest to chyba najgorzej wykonany element robota. Płytki zostały osadzone na 2 długich śrubach przytwierdzonych do podłoża. Zasilanie Zdecydowaliśmy się na zasilanie 11,1 V z 3 celowego pakietu Dualsky 400 mAh. Odpowiednie napięcie dla układów elektronicznych (5V) zapewnia stabilizator liniowy. Jeśli chodzi o silniki to PWM tak dobiera napięcie średnie aby ich nie spalić (max 9V). Mechanika Podstawa robota wykonana jest z stalowej blachy i stanowi oparcie dla ścian obudowy z luster. Niestety ze względu na problemy technologiczne elementy podpierające lustra prościej nam było zrobić z balsy, przez co podstawa jest trochę za lekka i trzeba było próbować dociążyć robota dodatkowymi odważnikami z ołowiu. Niestety udało się to tylko połowicznie ponieważ nie było tyle miejsca. Cięższy materiał do dociążenia (np. iryd czy osm, czyli metale o większej gęstości) jest niestety cenowo poza zasięgiem. Silniki główne to Pololu 30:1. Są one bardzo dobre dla tego robota, ponieważ jest on przez to szybki i może wykonywać zwody i manewry okalające szczególnie w pierwszej części walki. Niestety w zwarciu przegrywają z silnikami 50:1. Koła sami odlewamy koła z silikonu co bardzo dobrze wpływa na przyczepność robota. Niestety sama wymiana kół jest trudna dlatego nie zawsze są czas i chęci na zrobienie tego przed zawodami co skutkuje gorszymi parametrami podczas walk. Obudowa typu Stealth W praktyce obudowa typu stealth nie jest tak idealna, jak w założeniach. Można jednak powiedzieć, żę w miarę dobrze spełnia swoją rolę. Niestety są elementy, które ułatwiają lokalizacje robota: Otwory na czujniki Metalowa podstawa (kilka mm od podłogi) 2 śruby po bokach przytrzymujące obudowę Dodatkowo w trakcie walk w kilku miejscach lustra zostały porysowane przez noże innych robotów. Naprawienie tego wymagało by wymiany obudowy, ale jest to bardzo czasochłonne wiec nie zostało to nigdy zrealizowane. Program Program bazuje na programie z moich poprzednich robotów – FlyingMamut oraz MicroMamut. Został stworzony jest w oparciu o konkretne reguły odpowiadające staną czujników oraz stanowi logiki. Na podstawie stanu czujników i stanu obecnego ustalany jest stan następny. Program został napisany w języku C. Używałem WinAVR. Programuję przez USBAsp. Do debugowania programu używam złącza RS-232, którego moduł z układem MAX232 podpisany jest dodatkowo do robota. W toku prac i testów program został rozwinięty o specjalne manewry używane przy starcie robota do walki, tak aby korzystając z „niewidzialności” mógł zajść przeciwnika od tyłu. Niestety część robotów używa najprawdopodobniej algorytmów „na ślepo” atakujących w najbardziej prawdopodobne miejsce gdzie będzie nasz robot, a na małej planszy 77cm nie ma dużego pola manewru. Z powyższego powodu dobrze szło naszemu robotowi na planszy 144 cm na zawodach Robotic Arena we Wrocławiu. Dodatkowym mankamentem jest to, że gdy nasz robot ustawia się przodem to jest bardziej widoczny dla przeciwnika. Podsumowanie Jesteśmy bardzo zadowoleni z tego robota szczególnie, dlatego że udało się wprowadzić do zawodów kolejnego po FlyingMamucie robota, który nie bazuje tylko i wyłącznie na czystej sile i mocnym, ostrym klinie. Oprócz dobrej zdolności do walki, nasz robot jest też jednym z robotów o najczystszej formie i najlepszym designie (zewnętrznym). Dużym komplementem dla nas było to, gdy jeden z sędziów na pierwszych zawodach tego robota w Wałbrzychu powiedział „Nie myślałem jeszcze jakiś robot zaskoczy mnie w zawodach Minisumo”. Sukcesy tego robot sprawiły, że cały czas myślimy nad kolejnym nietypowym robotem, który mógłby walczyć o zwycięstwo 😉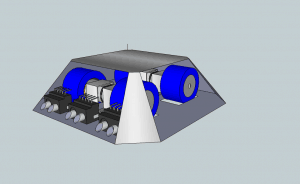






-
[Kupię] Kupię Sharp GP2Y0D340K oraz moduł startowy
mcwo82 opublikował temat w Sprzedam/Kupię/Zamienię/Praca
Cześć, jakby ktoś miał na zbyciu to kupię jeden lub kilka Sharpów GP2Y0D340K. Kupię też moduł startowy do xSumo. Pozdr. Maciek -
Robotic Tournament - Rybnik, 17.03.2018
mcwo82 odpisał w temacie użytkownika Komentator • Zawody/Konkursy/Wydarzenia
Cześć, na gorąco napiszę co mi się podobało a co nie na wczorajszych zawodach: ➕ fajnie zorganizowane zawody, wszystko poza kwestią harmognoramu było dopracowane i przemyślane ➕ międzynarodowa obsada, bardzo dużo robotów ➕ sprawna organizacja rejestracji ➕ przestronna strefa serwisowa ➕ pomocni organizatorzy ➕ dobrze działający system informatyczny -> jasna informacja o składzie grup i wynikach ➕ komentarze na żywo z niektórych walk ➕ dobre nagłośnienie słyszane dobrze w całym budynku ➕ użycie modułów startowych i start tyłem w konkurencjach w konkurencjach xSumo ➕ dobrej jakości plansze do xSumo ➕ fajne fajne statuetki i nagrody ➕ woda dostępna w strefie serwisowej oraz drożdżówki ➕ transmisja na żywo + wyświetlanie walk na telebimach ➕ tłumaczenie po angielsku dla zawodników z zagranicy ➖ nie dotrzymany harmonogram - zawody rozciągnęły się o 3 godziny (szczegóły poniżej) ➖ oddalona strefa serwisowa - wiem że to wynika z układu budynku no ale nie było to do końca wygodne szczególnie przy awariach tuż przed walką ➖ brak miejsca (np. dedykowanego stołu) w pobliżu plansz na postawienie robotów - jak ktoś ma więcej robotów to na prawdę takie miejsce by się przydało. Korzystaliśmy ze stołów sędziów, ale było to mniej wygodne. ➖ dekoracja na samym końcu, po 20.00, niektórzy musieli czekać 6 godzin. Odnośnie harmonogramu, myślę że główną przyczyną jest to, że było kilku zawodników, którzy mają kilka-kilkanaście robotów w wielu kategoriach i nie mogli być we wszystkich miejscach na raz. Sam nie jestem bez winy, bo wystawiałem 3 roboty. Nie wiem do końca jak to rozwiązać, ale myślę może warto rozważyć takie pomysły: * rozgrywanie poszczególnych konkurencji o określonych godzinach bez możliwości zmiany * takie ułożenie harmonogramu żeby nie konkurencje nie kolidowały, lub żeby część nie kolidowała - typu xSumo nie kolidują ze sobą, xLego ze sobą. LFy chyba można zrobić kiedy się chce. * wymóg aby gdy dana drużyna wystawia więcej robotów na każdego robota (lub max 2-3) przypadał jeden operator, tak aby nie blokować na wzajem konkurencji Jeszcze raz wielkie dzięki dla organizatorów. Do zobaczenia za rok 🙂 Pozdr. Maciek -
[Zawody] RoboticArena 2014 - 06.12.2014, Wrocław
mcwo82 odpisał w temacie użytkownika Treker • Zawody/Konkursy/Wydarzenia
Moje podsumowanie zawodów: Generalnie zawody były bardzo dobrze zorganizowane. Widać że organizatorzy się postarali. Zostały pozytywne rzeczy z poprzedniech edycji zawodów, a prawie wszystkie błędy udało się wyeliminować. ➕ fajne miejsce na zawody - lepsze niż poprzedni budynek ➕ użycie modułów startowych i start tyłem w konkurencjach w konkurencjach xSumo (może to oczywistość ale jeszcze nie wszyscy organizatorzy to wiedzą wiec piszę z myślą głownie o nich 😃 ) ➕ walki na większych ringach w xSumo - walki są ciekawsze na dużych ringach ➕ dobrej jakości plansze do xSumo, dodatkowo plus za to że plansze były ustawione na stołach - dzięki temu łatwiejszy dostęp ➕ fajne fajne statuetki i dyplomy (wypisywane tak jak chciał uczestnik) ➕ dobrze działający system informatyczny -> jasna informacja o składzie grup i wynikach ➕ komentowane walki finałowe ➕ dekoracja niedługo po skończonych walkach ➕ przestronna strefa serwisowa wyposażona we wszystko co potrzeba ➕ dotrzymany harmonogram ➕ sprawna organizacja rejestracji ➕ pomocni organizatorzy ➕ wysoki poziom sędziowania ➕ w miarę dobre nagłośnienie, wspierane przez ręczny megafon w razie potrzeby ➖ brak czegokolwiek do picia w budynku. Trzeba było biegać po okolicy, myślę że woda dla zawodników byłaby rozwiązaniem. ➖ relatywnie oddalona strefa serwisowa - wiem że to wynika z układu budynku no ale nie było to do końca wygodne szczególnie przy awariach tuż przed walką ➖ brak miejsca (np. dedykowanego stołu) w pobliżu plansz na postawienie robotów - jak ktoś ma więcej robotów to na prawdę takie miejsce by się przydało. Korzystaliśmy ze stołów sędziów, ale było to mniej wygodne. Na koniec parę rzeczy których nie mogę nazwać na pewno minusami ale można by się nad nimi zastanowić: - wideo na telebimach - jakiś poczęstunek dla zawodników - konkurencja Sumo Standard Jeszcze raz wielkie dzięki dla organizatorów. Do zobaczenia za rok 🙂 Pozdr. Maciek -
[Zawody] RoboticArena 2014 - 06.12.2014, Wrocław
mcwo82 odpisał w temacie użytkownika Treker • Zawody/Konkursy/Wydarzenia
Hejka, szukam transportu z okolic Katowic/Gliwic na RA 2014. Nie jedzie ktoś przypadkiem ze śląska lub tranzytem i nie ma wolnego miejsca? 🙂 Dorzucam się oczywiście do kosztów. Pozdr. Maciek -
[Zawody] Festiwal Robotyki ROBOCOMP 2014 - 25.10.14, Kraków
mcwo82 odpisał w temacie użytkownika Treker • Zawody/Konkursy/Wydarzenia
Kojarzę tylko w moich kategoriach. W Sumo Standard stawiły się 3 roboty, były jeszcze 2 które przez problemy techniczne się nie pojawiły na ringu. MicroSumo - 5 robotów MiniSumo - tutaj było najwięcej, ile dokłądnie nie kojarze ale chyba 4 grupy po 6. Przy czym ok 10 robotów przywieźli Litwini, którzy też zgarnęli całe podium. Pozdr. M. -
[Zawody] Festiwal Robotyki ROBOCOMP 2014 - 25.10.14, Kraków
mcwo82 odpisał w temacie użytkownika Treker • Zawody/Konkursy/Wydarzenia
Moje podsumowanie zawodów: ➕ fajne miejsce na zawody ➕ finały na auli z transmisją na telebimach ➕ poczęstunek ➕ fajni sponsorzy i fajne nagrody ➕ koszulki dla zawodników ➕ dobrej jakości plansze do xSumo ➕ medale i fajne dyplomy (z nazwiskami i nazwą robota) ➖ brak modułów startowych w konkurencjach xSumo ➖ start przodem w konkurencjach xSumo ➖ problemy organizacyjne ogólne jak i te związane z wizytą gubernatora (o której było wiadomo wcześniej) ➖ czytanie robotów po numerach a nie po nazwach. Co przy organizacyjnie jest ok, ale jednak po to wymyślamy ciekawe nazwy robotom, żeby przy wywołaniu czy przy prezentacji przez walką jednak były po nazwie 🙂 Generalnie, mimo niedociągnięć było bardzo fajnie. Dzięki dla organizatorów za poświęconą pracę no i do zobaczenia za rok 🙂 -
[Zawody] Festiwal Robotyki ROBOCOMP 2014 - 25.10.14, Kraków
mcwo82 odpisał w temacie użytkownika Treker • Zawody/Konkursy/Wydarzenia
Czy w kategoriach sumo będą moduły startowe? -
@zuba1 Nie sprawdzałem na ile walk dokładnie ale na pewno na kilkanaście rund spokojnie, ponieważ walki trwają zazwyczaj kilka sekund. Akumulator są malutkie (110 mAh) wiec staram się je doładowywać jak najczęśniej @Gelten Może źle widać ale zębatka jest jak najbardziej nałożona na wał przedniego silnika. Koło które widać jest zespolone z drugą zębatką. Generalnie chodziło o to żeby wszystko jakoś pomieścić. Dodatkowo płytki stanową też "szkielet" robota wraz z obudową zapewniając sztywność. Btw. jak masz jakieś pomysły jak inaczej to upchać to chętnie usłyszę - może będziemy robić kolejną wersję uSumo 🙂
-
Wstęp MicroMamut to nasz drugi robot. Tym razem postawiliśmy na kategorie MicroSumo. Założenia dla robota były takie by był w miarę szybki i oparty o czujniki Sharpa GP2Y0D340K. Jest to pierwszy nasz robot z elektroniką zbudowaną w technologii SMD. Najwiekszym wyzwaniem dla robota było zmieszczenie wszystkich elementów w ramach wymiarów 5x5x5 cm. Robot został złożony na 3 godziny przez zawodami Robotic Arena 2013, ale od razu zajął tam 3cie miejsce. Później na większości zawodów, na których startował też plasował się na podium. Lista sukcesów w sezonie 2013/2014: III miejsce na Robotic Arena 2013 II miejsce na T-BOT 2014 I miejsce na Robomaticon 2014 II miejsce na ROBO~motion 2014 I miejsce na ROBOXY 2014 Projektowanie Robot został zaprojektowany przy pomocy programu SketchUP. Dzięki wykorzystaniu tego programu udało się w miarę wszystko upakować zgodnie z zamierzeniami. Dodatkowo obudowa zaprojektowana w programie została wydrukowana na drukarce 3D co przyspieszyło prace. Schemat i płyki Robot ma trzy płytki które poza miescem na elektronikę stanowią także poziome elementy konstrukcyjne robota. Dolna płytka jest podstawą robota do której przytwierdzone są silniki. Dodatkowo przylutowane są do niej czujniki linii. Połączona jest ona kablami z górną płytką. Średnia płytka jest podstawą dla akmulatorów. Zawiera ona stabilizator liniowy oraz mostek H. Jest połączona kablami z płytą górną. Górna płytka jest płytką, na której znajduje się procesor. Zbiera ona sygnały z pozostałych płytek oraz z czujników. Znajdują się też na niej diody oraz są do niej przytwierdzone moduł startowy oraz przyciski. Dodatkowo ma ona wyprowadzone złącze programatora oraz układu debugu przez RS-232. Projekt schematu i płytki zostały wykonane w Eaglu. Płytki zostały wykonane na zlecenie. Elektronika Podstawowe elementy wykorzystane w układzie to: 1. Procesor Atmega 16 - sterowanie całym robotem 2. 3 czujniki 40 cm Sharp GP2Y0D340K - czujniki przeciwnika, jeden patrzący na wprost i dwa ustawione pod kątem 30 st. 3. 3 czujniki linii - KTIR0711S - do wykrywania linii oczywiście. 4. TB6612- dwukanałowy mostek H dla silników, sterowany sygnałami PWM z procesora 5. Stabilizator napięcia lm1117 dla zapewnienia 5V zasilania dla układów. Generalnie elektronika spełnia dobrze swoje zadania, dzięki zastosowaniu technologii powierzchniowej udało się zaoszczędzić dość dużo miejsca. Zasilanie Zdecydowaliśmy się na zasilanie 7,4V z dwóch cel. Aby odpowiednio upakować układy i dobrze rozłożyć ciężar wykorzystaliśmy dwa ogniwa jednocelowe z których poprzez odpowiednie połączenie został stworzony pakiet dwucelowy. Mechanika Jak wspomniano wcześniej podstawa robota to dolna płytka elektroniczna. Silniki to kultowe Pololu 30:1. Ponieważ są one dosyć dużo i nie mieszczą się w jednej osi na szerokość, trzeba było znaleźć sposób na odpowiednie ich ułożenie. Zdecydowaliśmy się na ułożenie silników jeden za drugim i przekazanie napędu jednego z nich na oś za pomocą kół zębatych. Było to trudne technicznie ale zapewnia dobre właściwości jezdne robota. Koła zostały odlane z silikonu. Wszystkie płytki elektroniczne połączone są przewodami na stałe. Rezygnacja ze złącz to duża oszczędność miejsca, utrudnia to jednak mocno prace konserwujące robota. Obudowa została wykonana w technologii druku 3D, i ze względu na dostęp do robota jest sklejona taśmą klejącą zamiast klejem. Przednia obudowa pełni funkcję "noża", nie jest ona jednak w tym zbyt efektywna. Robot dociążony jest odważnikami z ołowiu zaprojektowanymi w 3D i odlewanymi specjalnie dla niego, oraz dodatkowo dwoma odważnikami stalowymi na przedniej obudowie. Pomimo tego ma tendencje do przewracania się na tył. W maju 2014 robot przeszedł gruntowny przegląd, i zostały wymienione przewody wewnętrzne które powodowały czasami przerwy w działaniu. Problemy były związane bardzo krótkim czasem budowy, ale zostały już rozwiązane. Program Początkowo program był bardzo prosty. Na przełomie 2013 i 2014 program został przepisany na nowszy, bardziej czytelny i dający większe możliwości rozwoju. Obydwa programy bazują na programie z robota FlyingMamut. Program stworzony jest w oparciu o konkretne reguły odpowiadające staną czujników oraz stanowi logiki. Na podstawie stanu czujników i stanu obecnego ustalany jest stan następny. Program został napisany w języku C. Używałem WinAVR. Programuję przez USBAsp. Do debugowania programu używam złącza RS-232, którego moduł z układem MAX232 podpisany jest dodatkowo do robota. Podsumowanie Robot jest kolejnym etapem w naszej przygodzie z robotami sumo. Tym razem podeszliśmy do tematu już bardziej profesjonalnie i korzystaliśmy z projektowania 3D oraz technologii SMD. Robot świetnie spisywał się przez cały sezon 2013/2014, choć pod koniec sezonu zaczął już częściej przegrywać z innymi konstrukcjami. Zaletami robota jest jego szybkość oraz dobre czujniki. Wadami są złe rozłożenie wagi oraz brak noża. Robot po małych ulepszeniach będzie startował dalej ponieważ ma jeszcze potencjał. W planie jest kolejna konstrukcja microsumo bazująca na doświadczeniach z tego robota.

-
Tolo, zgodzę się że wiele robotów na to się teraz nastawia, ale nie wszystkie, zobacz np FlyingMamuta . Wydaje mi się że jest jeszcze dużo pola w tej konkurencji na różnego rodzaju typu innowacje. Jak dobrze pójdzie to na następny sezon pokażemy kolejny nowy pomysł 🙂
-
Opolski Festiwal Robotów 2014
mcwo82 odpisał w temacie użytkownika ProeXtreme • Zawody/Konkursy/Wydarzenia
O, super. Jaka cena? -
Opolski Festiwal Robotów 2014
mcwo82 odpisał w temacie użytkownika ProeXtreme • Zawody/Konkursy/Wydarzenia
Pytanie do organizatorów: czy moduły startowe do xSumo będzie można wypożyczyć jak na większości zawodów? Nie widzę infrormacji na stronie