Przeszukaj forum
Pokazywanie wyników dla tagów 'Microsumo'.
Znaleziono 6 wyników
-
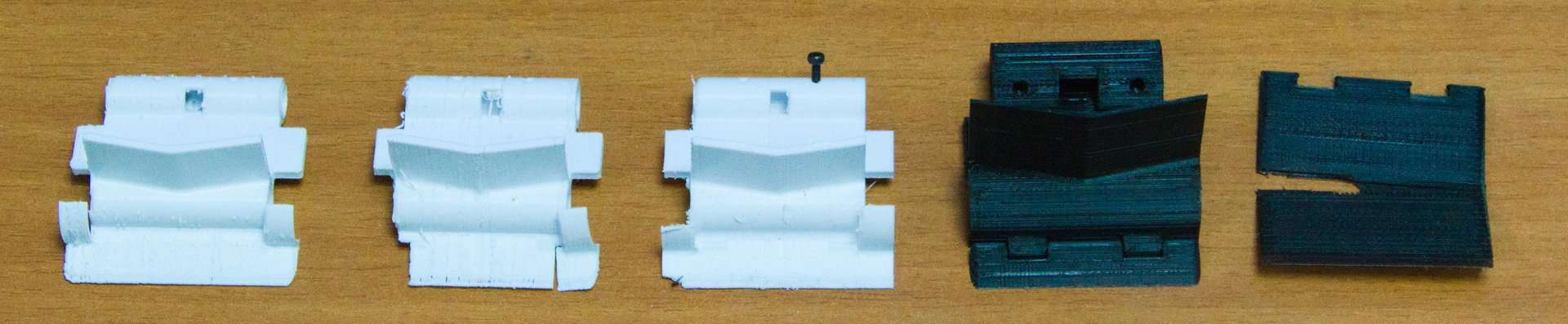
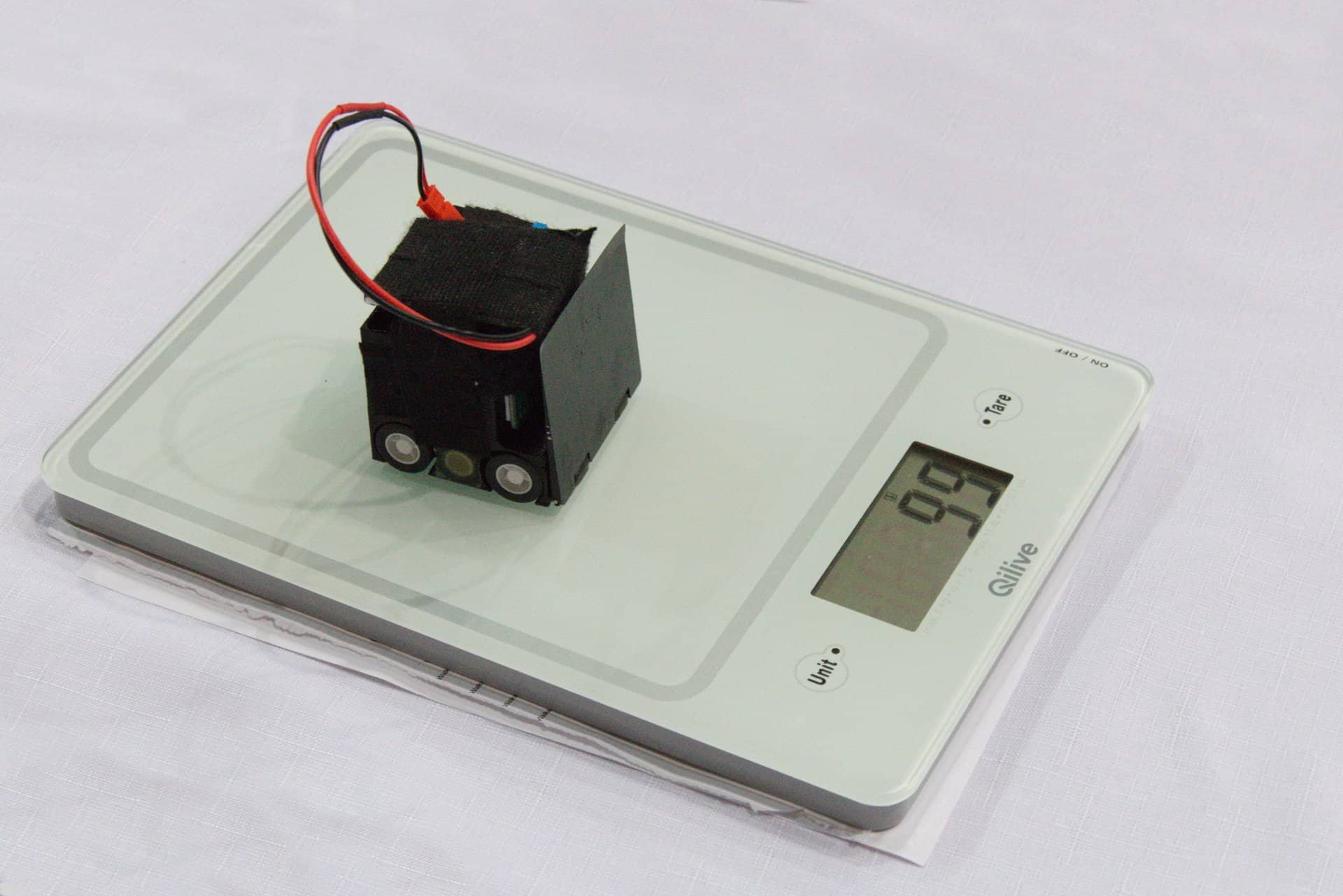
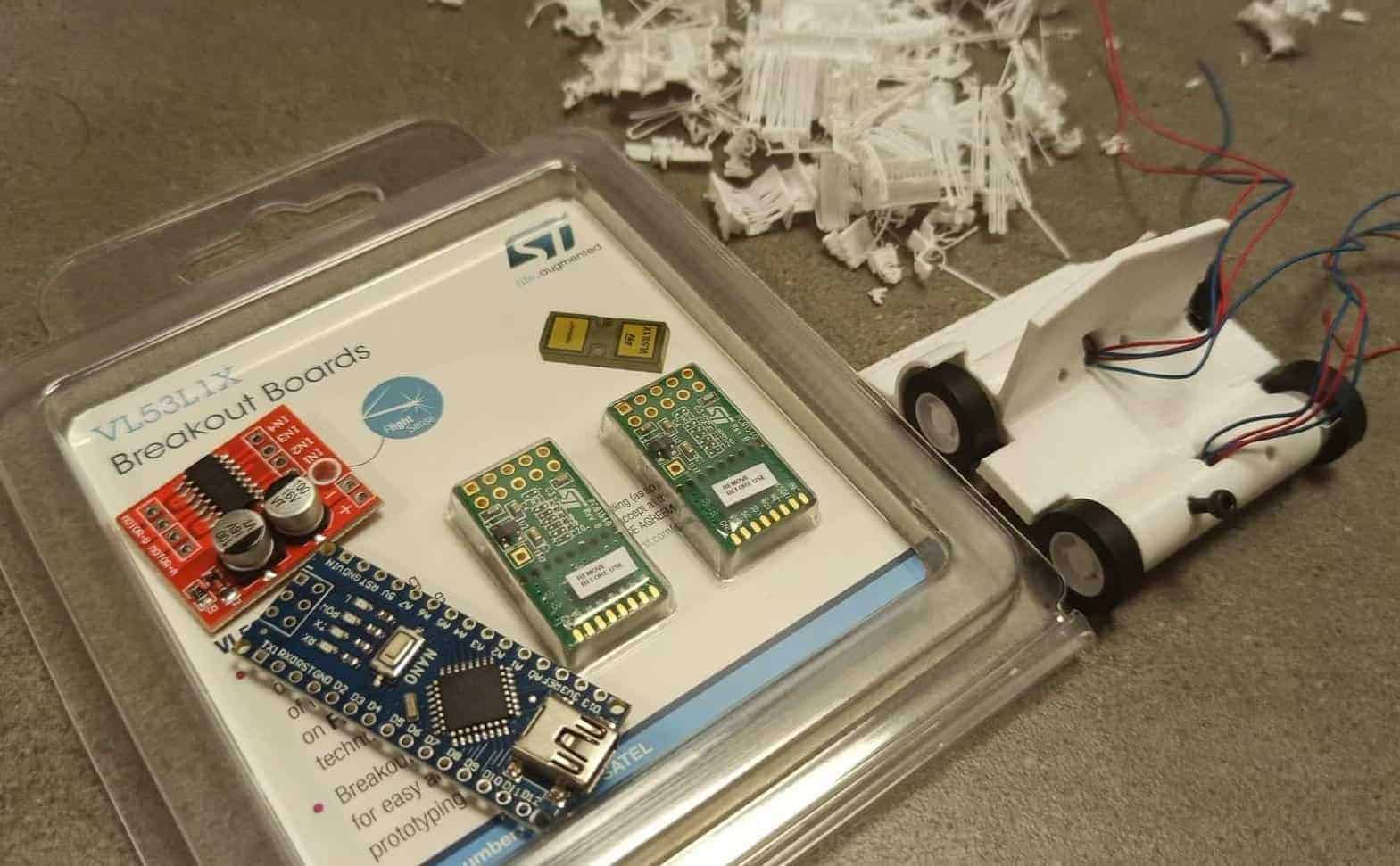
Zgodnie z nazwą ten robot nie miał powstać. Jego historia zaczyna się w maju 2019 roku. Został mi wtedy przyznany przez Wydział Elektroniki Mikrosystemów i Fotoniki Politechniki Wrocławskiej grant na realizację robota kategorii nanosumo. Postawiłem sobie jako deadline na pierwszy działający prototyp Robocomp 2019. Wtedy myślałem że to dużo czasu. Niestety koła zębate biurokracji wolne są, Digikey nie miało kluczowej części a na mój brak czasu i problemy z nim zarządzaniem już na łamach tego forum narzekałem. Złożyło się to na brak funkcjonalnej wersji czegokolwiek na tydzień przed konkursem. Na szczęście w zamówieniu było trochę modułów a w moich szufladach jeszcze więcej. No i druk 3d uratował dzień jak zawsze: Jako napęd robota posłużyły cztery silniki sub-micro 26:1. Cztery silniki dają sporą mechaniczną przewagę w *sumo ponieważ pozwalają na przeniesienie przez koła praktycznie całej masy robota, a jak wiadomo Td = µN. Do tego zamontowałem opadający pług który dociążyłem około połowy wysokości metalową ośką 1mm co podniosło jego środek ciężkości. Okazał się bardzo skuteczny, szczególnie przeciwko robotowi z stałym pługiem dość daleko od ziemi z którym walczyłem w półfinale. Aby ciężar wyniósł jak najbliżej 100g w robocie umieściłem około 30 nakrętek M5 bo akurat były pod ręką. Początkowo silnikami miał sterować chiński moduł opisywany jako mini-L298N do którego dokumentacja prawdopodobnie nie istnieje ale po tym jak nie zadziałał od ręki wymieniłem go na 2x Pololu DRV8838. Prawdopodobnie źle go podłączyłem (autopsja w planach) przez co na jednym silniku nie działała praca w tył. Zostało to "rozwiązane" programowo. Sercem robota było Arduno Pro Micro (wybrane ze względu na to że leżało pod ręką) zasilane przez przetwornicę step-up do USB poddaną subtelnej modyfikacji kombinerkami z pojedynczej celi LiPo (która zasilała też mostek H bezpośrednio). No i ostatecznie jedyna ciekawa rzecz w tym robocie - VL53L1X-SATEL - breakouty do świetnych czujników odległości TOF od ST. Zdążyłem tylko wstępnie ogarnąć ich możliwości ale wydają sioę bardzo obiecujące. Niestety zupełnie nie widziały robota przeciwnika (wydrukowanego 3D) w finale, przyczyny zostaną zbadane. Kod powstał w autobusie do Krakowa i strefie dla zawodników. Jest napisany w bardzo nieeleganckim Arduino C++. Jego logika składa się z 3 if-ów. Działa. W "najbliższym" czasie powinny się pojawić worklog do nanosumo bo tam planuję sporo ciekawsze rozwiązania jak customowe elastyczne PCB. Pewnie jeszcze tu wrócę i trochę poprawię.






-
MESS czyli Mały Elektroniczny Spychacz Sześcianów to moja pierwsza konstrukcja, która jest zarówno moim pierwszym projektem w technologii powierzchniowej. Prace nad robotem trwały nieco ponad tydzień, a całkowity koszt jego budowy to około 80zł. Algorytm sterujący został napisany w języku C. Wymiary nieznacznie przekraczają regulaminowe 5x5x5 i 100g wagi, jednak robot nie został zbudowany do startowania w zawodach. Jego zadaniem jest cieszyć oko radząc sobie bez problemu ze spychaniem przeszkód ( głównie małych papierowych sześcianów 4x4x4cm) z powierzchni ringu. 1.Konstrukcja mechaniczna Szkielet robota tworzą dwie płytki laminatu które jednocześnie pełnią funkcję obwodów drukowanych. Pomiędzy nimi umieszczone zostały dwa przerobione serwomechanizmy Redox S90 tak, aby ich wały wyjściowe znajdowały się w jednej osi. Konieczne było wycięcie części plastikowej obudowy serwomechanizmu w celu zrealizowania zamierzonych wymiarów robota. Koła MESS`a to popularne koła Pololu 32x7mm, które zostały delikatnie wyfrezowane w celu umieszczenia w nich orczyków od wspomnianych serwomechanizmów. 2. Elektronika i zasilanie Dolna płytka szkieletu zawiera dwa czujniki odbiciowe CNY70 służące do wykrywania białej linii granicznej ringu i niezbędne do ich obsługi elementy pasywne. Płytka posiada cztery wyprowadzenia dzięki którym łączy się z główną płytką sterującą górną( zasilanie i sygnały napięciowe od każdego z czujników ). Mózgiem robota jest mikrokontroler atmega8A w obudowie TQPF32 , a za wysterowanie silników odpowiedzialny jest podwójny mostek H TB6612. Na górnej płytce znajdują się ponad to wyprowadzenia ISP, wyprowadzenia pinów UART’a co daje możliwość debugowania w terminalu, przycisk uruchamiający pętle główną robota, czerwona dioda led i garstka niezbędnych elementów pasywnych do filtracji zasilania. Wykrywaniem przeszkód do zepchnięcia zajmuje się cyfrowy czujnik odległości SHARP GP2Y0D340K, generujący przerwania zewnętrzne procesora na zbocze opadające. MESS zasilany jest z pakietu Li-Pol Dualsky 7.4V 220mAh 25C, a za doprowadzenie odpowiedniego napięcia zasilającego logikę robota odpowiada stabilizator LDO LM1117 w obudowie TO252. 3. Zdjęcia 4.Film
.thumb.JPG.0610c7ecbfde7c52ab3240f35b99e7ec.JPG)
-
Wstęp MicroMamut to nasz drugi robot. Tym razem postawiliśmy na kategorie MicroSumo. Założenia dla robota były takie by był w miarę szybki i oparty o czujniki Sharpa GP2Y0D340K. Jest to pierwszy nasz robot z elektroniką zbudowaną w technologii SMD. Najwiekszym wyzwaniem dla robota było zmieszczenie wszystkich elementów w ramach wymiarów 5x5x5 cm. Robot został złożony na 3 godziny przez zawodami Robotic Arena 2013, ale od razu zajął tam 3cie miejsce. Później na większości zawodów, na których startował też plasował się na podium. Lista sukcesów w sezonie 2013/2014: III miejsce na Robotic Arena 2013 II miejsce na T-BOT 2014 I miejsce na Robomaticon 2014 II miejsce na ROBO~motion 2014 I miejsce na ROBOXY 2014 Projektowanie Robot został zaprojektowany przy pomocy programu SketchUP. Dzięki wykorzystaniu tego programu udało się w miarę wszystko upakować zgodnie z zamierzeniami. Dodatkowo obudowa zaprojektowana w programie została wydrukowana na drukarce 3D co przyspieszyło prace. Schemat i płyki Robot ma trzy płytki które poza miescem na elektronikę stanowią także poziome elementy konstrukcyjne robota. Dolna płytka jest podstawą robota do której przytwierdzone są silniki. Dodatkowo przylutowane są do niej czujniki linii. Połączona jest ona kablami z górną płytką. Średnia płytka jest podstawą dla akmulatorów. Zawiera ona stabilizator liniowy oraz mostek H. Jest połączona kablami z płytą górną. Górna płytka jest płytką, na której znajduje się procesor. Zbiera ona sygnały z pozostałych płytek oraz z czujników. Znajdują się też na niej diody oraz są do niej przytwierdzone moduł startowy oraz przyciski. Dodatkowo ma ona wyprowadzone złącze programatora oraz układu debugu przez RS-232. Projekt schematu i płytki zostały wykonane w Eaglu. Płytki zostały wykonane na zlecenie. Elektronika Podstawowe elementy wykorzystane w układzie to: 1. Procesor Atmega 16 - sterowanie całym robotem 2. 3 czujniki 40 cm Sharp GP2Y0D340K - czujniki przeciwnika, jeden patrzący na wprost i dwa ustawione pod kątem 30 st. 3. 3 czujniki linii - KTIR0711S - do wykrywania linii oczywiście. 4. TB6612- dwukanałowy mostek H dla silników, sterowany sygnałami PWM z procesora 5. Stabilizator napięcia lm1117 dla zapewnienia 5V zasilania dla układów. Generalnie elektronika spełnia dobrze swoje zadania, dzięki zastosowaniu technologii powierzchniowej udało się zaoszczędzić dość dużo miejsca. Zasilanie Zdecydowaliśmy się na zasilanie 7,4V z dwóch cel. Aby odpowiednio upakować układy i dobrze rozłożyć ciężar wykorzystaliśmy dwa ogniwa jednocelowe z których poprzez odpowiednie połączenie został stworzony pakiet dwucelowy. Mechanika Jak wspomniano wcześniej podstawa robota to dolna płytka elektroniczna. Silniki to kultowe Pololu 30:1. Ponieważ są one dosyć dużo i nie mieszczą się w jednej osi na szerokość, trzeba było znaleźć sposób na odpowiednie ich ułożenie. Zdecydowaliśmy się na ułożenie silników jeden za drugim i przekazanie napędu jednego z nich na oś za pomocą kół zębatych. Było to trudne technicznie ale zapewnia dobre właściwości jezdne robota. Koła zostały odlane z silikonu. Wszystkie płytki elektroniczne połączone są przewodami na stałe. Rezygnacja ze złącz to duża oszczędność miejsca, utrudnia to jednak mocno prace konserwujące robota. Obudowa została wykonana w technologii druku 3D, i ze względu na dostęp do robota jest sklejona taśmą klejącą zamiast klejem. Przednia obudowa pełni funkcję "noża", nie jest ona jednak w tym zbyt efektywna. Robot dociążony jest odważnikami z ołowiu zaprojektowanymi w 3D i odlewanymi specjalnie dla niego, oraz dodatkowo dwoma odważnikami stalowymi na przedniej obudowie. Pomimo tego ma tendencje do przewracania się na tył. W maju 2014 robot przeszedł gruntowny przegląd, i zostały wymienione przewody wewnętrzne które powodowały czasami przerwy w działaniu. Problemy były związane bardzo krótkim czasem budowy, ale zostały już rozwiązane. Program Początkowo program był bardzo prosty. Na przełomie 2013 i 2014 program został przepisany na nowszy, bardziej czytelny i dający większe możliwości rozwoju. Obydwa programy bazują na programie z robota FlyingMamut. Program stworzony jest w oparciu o konkretne reguły odpowiadające staną czujników oraz stanowi logiki. Na podstawie stanu czujników i stanu obecnego ustalany jest stan następny. Program został napisany w języku C. Używałem WinAVR. Programuję przez USBAsp. Do debugowania programu używam złącza RS-232, którego moduł z układem MAX232 podpisany jest dodatkowo do robota. Podsumowanie Robot jest kolejnym etapem w naszej przygodzie z robotami sumo. Tym razem podeszliśmy do tematu już bardziej profesjonalnie i korzystaliśmy z projektowania 3D oraz technologii SMD. Robot świetnie spisywał się przez cały sezon 2013/2014, choć pod koniec sezonu zaczął już częściej przegrywać z innymi konstrukcjami. Zaletami robota jest jego szybkość oraz dobre czujniki. Wadami są złe rozłożenie wagi oraz brak noża. Robot po małych ulepszeniach będzie startował dalej ponieważ ma jeszcze potencjał. W planie jest kolejna konstrukcja microsumo bazująca na doświadczeniach z tego robota.

-
Cześć, chciałabym przedstawić swoją konstrukcję - robota klasy microsumo. Zaczynał swoją karierę już w Wiedniu, jednak dopiero teraz znalazłam czas na opisanie go na tym forum. Na początek parę słów o nazwie Go. Wzięła się ona stąd, że wcześniej planowałam zbudować robota klasy sumo, jednak koło naukowe odrzuciło mój wniosek. Sumo miało nazywać się Godzilla. Po zmniejszeniu rozmiaru robota zmniejszeniu uległa też nazwa robota. 🙂 Jeśli chodzi o mnie, to jestem studentką Automatyki i Robotyki na Politechnice Wrocławskiej, a swoją przygodę z kołem naukowym KoNaR zaczęłam półtora roku temu. Go powstawał od czerwca zeszłego roku i zajmował już wysokie miejsca na zawodach w Polsce. W planach mam stworzenie podobnej konstrukcji, mając na uwadze wszystkie poprzednie błędy i potknięcia, które nierzadko przytrafiały mi się jako początkującej. 1. Konstrukcja mechaniczna Projekt mechaniczny wykonałam w programie Autodesk Inventor. Biblioteki niektórych części, na przykład silników znalazłam na forum elektroda.pl, resztę zaprojektowałam sama. Podwozie jest wykonane z mosiądzu (w celu obniżenia środka ciężkości), a do niego przyczepiony jest pług. Przyznam, że ta część konstrukcji była wyzwaniem. Jak zmieścić zawiasy mając do wykorzystania zaledwie 2 mm miejsca? Po długich poszukiwaniach znalazłam odpowiednie zawiasy modelarskie, bardzo cieniutkie, które sprawdzają się idealnie. Pochyła przednia ścianka obudowy pozwala na stabilne oparcie pługu, ale krzywizna jest na tyle mała, aby po gwałtownym skręcie ten mógł opaść. Pomimo maksymalnego upakowania elementów uważam, że ta część konstrukcji posiada swoją zaletę. W prawie wszystkich walkach pług zdołał opaść i robot skierowany na przeciwnika zawsze "zabierał" go ze sobą. Na początku pług miał długość 45 mm, bo "zawsze można skrócić". Niestety, w Wiedniu okazało się, że po wypchnięciu przeciwnika, a raczej w trakcie wypychania dotykał on podłoża, co powodowało wygraną przeciwnika. Nie przejęłam się tym za bardzo, ponieważ to i tak były pierwsze zawody Go. W tej chwili pług jest długości około 25 mm i sprawdza się doskonale. Dalsza część konstrukcji to koła Pololu o średnicy 32 mm. Nie jest to najlepsze rozwiązanie, ponieważ mogły być dużo mniejsze, ale nie pomyślałam o tym, aby znaleźć kogoś, kto by mi takie felgi wytoczył. Opony były odlewane z poliuretanu, żeby miały lepszą przyczepność. Obudowa robota to wyfrezowane kawałki laminatu z otworami na czujniki. Nadają one Go wygląd creepera. Najgorsze i najbardziej beznadziejne rozwiązanie, którego absolutnie nie polecam to składanie robota w "kanapkę". Cztery śruby mocowały do podwozia 2 płytki z elektroniką oraz silniki. Złożyłam robota raz i mam szczęście, że jeszcze nic się nie zepsuło na tyle, aby to rozkładać ponownie. Jakość wykonania ręcznie robionych obejm z laminatu jest słaba na tyle, że wszystko wchodzi dosłownie na wcisk, jest krzywe i trzeba całą tę "kanapkę" stabilizować i podtrzymywać podkładkami i nakrętkami , których wkręcenie zajmuje wieczność. Silniki zostały przylutowane do płytek z laminatu. W silnikach Pololu HP z przekładnią 50:1 zastosowano patent z odwróconą przekładnią, przez co można je było umieścić obok siebie. Obie płytki z elektroniką zostały połączone długimi goldpinami. Oczami robota jest pięć cyfrowych sharpów GP2Y0D340K - 40-centymetrowych czujników odległości. Dodatkowo, w podwoziu zamontowano 4 czujniki białej linii KTIR0711S, ale ostatecznie ograniczyłam się do dwóch z przodu (trzeci się zepsuł, a czwarty nie działał ...). Każdy z czujników odbiciowych był przylutowany do osobnej płytki o wymiarach 4x9 mm, które robiłam własnoręcznie. Z główną płytką są połączone kablami. Na wierzchu widoczny jest też konarowy moduł startowy bezpośrednio przylutowany do goldpinów, a także dociążenie z postaci płatków ołowiu bezpośrednio przyklejone do czujnika. Nie jest to zbyt eleganckie rozwiązanie, ale powstało na szybko na ostatnich zawodach. Waga robota to 98g. 2. Elektronika Schemat stworzony został w programie Altium Designer. Całością zarządza mikrokontroler ATmega88. Do sterowania silnikami wykorzystałam popularny podwójny mostek H - TB6612. Jak już wcześniej wspomniałam, czujniki znajdują się na osobnych płytkach, natomiast na głównej są tylko złącza. Poza tymi od czujników jest też złącze do programowania i zasilające. Silniki są zasilane bezpośrednio z baterii. Natomiast cała logika oraz czujniki są zasilane ze stabilizowanego 5V. Wykorzystałam w tym celu 2 stabilizatory: MCP1825S-5002E/DB (czujniki) oraz TC1185-5.0VCT713. Robot jest bardzo szybki i wiele razy uciekał z ringu, dlatego wygodnym jest zdalne włączanie go, a zwłaszcza wyłączanie. Wadą jest brak komunikacji z robotem - przeoczyłam wyprowadzenie złącza do UARTa. Ponieważ miejsca pomiędzy podwoziem a silnikami jest bardzo mało (8 mm) dopiero po paru miesiącach udało mi się zakupić ogniwa Li-Polymer o wymiarach 3x15x20 mm sztuka i napięciu 3.6V. Pojemność 120mAh jest wystarczająca do stoczenia 3 walk po 3 rundy. 3. Oprogramowanie Kod programu został oparty o program CeBOTów - robotów microsumo stworzonych jako prezentacja KoNaRu na targach CeBIT 2013. Autorem programu jest Bartosz Wawrzacz (Baton). Nie ma w nim niczego skomplikowanego, po prostu algorytm: "znajdź i wypchnij, a jeśli zobaczysz białą linię - uciekaj". 4. Podsumowanie i wnioski Budowa Go nauczyła mnie budowy robota od podstaw - od obsługi programów typu Altium Designer lub Autodesk Inventor po praktyczne zastosowanie elektroniki, czego nie uczą nas na studiach. Robienie czegoś tak małego było sporym wyzwaniem. Na początku projektowania musiałam sobie zrobić sześcian o boku 5 cm z papieru, żeby uświadomić sobie skalę przedsięwzięcia. Jestem bardzo zadowolona też z tego, że moja konstrukcja pomimo wielu błędów i pomyłek jest w stanie mierzyć się z innymi i w dodatku wygrywać. Moje najbliższe cele to dopracować projekt i zbudować nowego robota tej samej klasy. A później może spróbować zmniejszyć jeszcze rozmiar, może w nanosumo. Albo femtosumo, żeby Felek miał z kim walczyć. Sukcesy Go to jak na razie: RobotChallenge 2013 (Wiedeń)- 1/8 finału - poniżej najważniejsza finałowa walka, widać na niej, że pług jest ewidentnie zbyt długi, przez co Go przegrał. Robo~motion 2013 (Rzeszów) - 2. miejsce Walka z ruchomym przeciwnikiem: Z nieruchomym też daje radę: A tutaj jeszcze widać, że niezbyt boi się białej linii, co też muszę poprawić: Robocomp 2013 (Kraków) - 1. miejsce, ale muszę przyznać, że konkurenci nie dopisali. Będę wdzięczna za wszelkie uwagi. 🙂
-
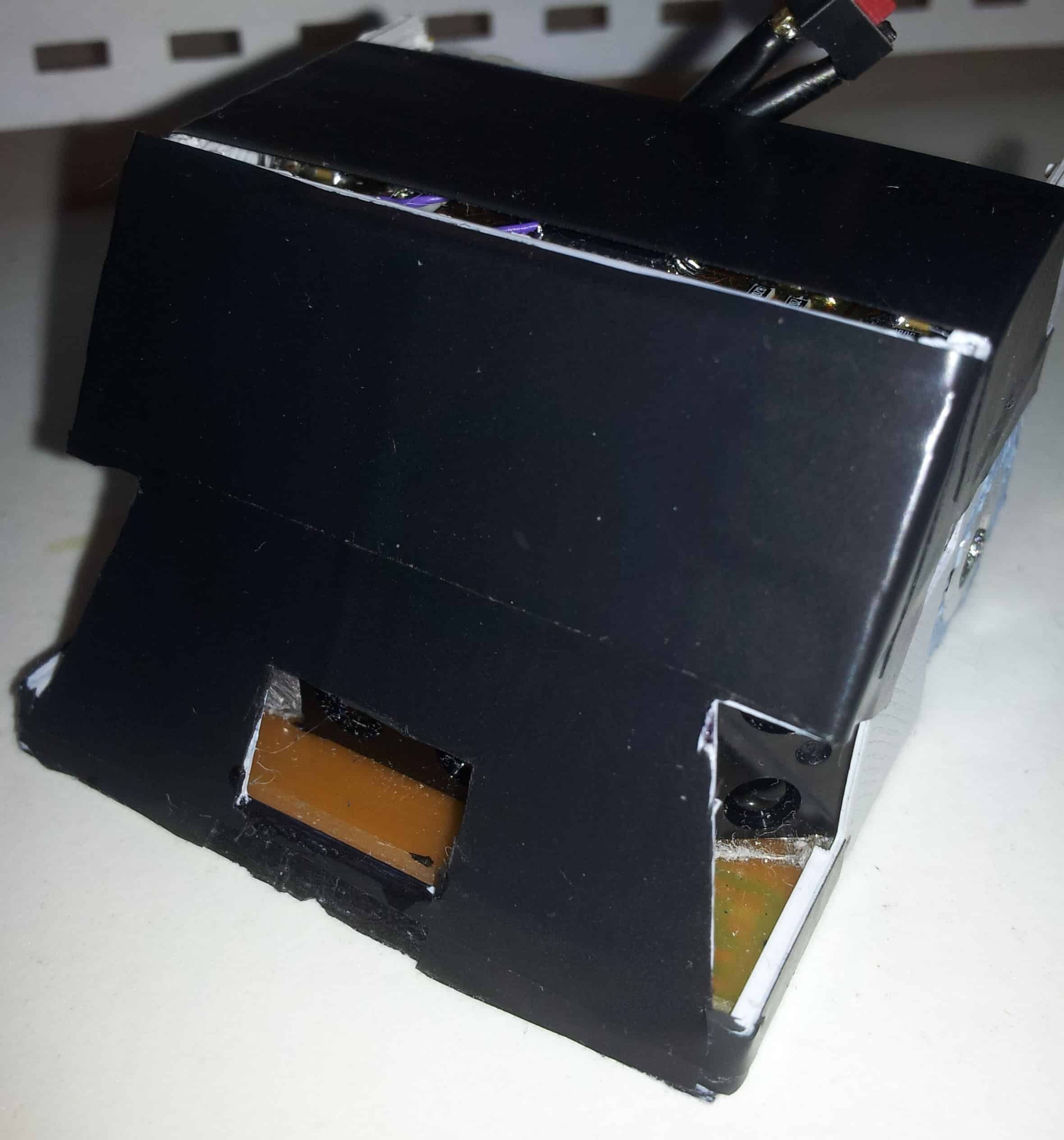
Witam wszystkich, chciałbym Wam pokazać moją drugą, oficjalną konstrukcję. Krótka charakterystyka: 1. Wymiary: 50x50x47mm (bez górnych kabli) 2. Waga: około 98 gram 3. Zasilanie: 7,4V li-pol 4. Brak elementów smd 5. Czas budowy: koniec czerwca - początek września 6. Koszt budowy (elementów): 50 - 100zł (w zależności jak na to spojrzeć) Robot w sensie projektowym i konstrukcyjnym jest gotowy ale musiałem przerwać prace nad algorytmem walki z powodu zmielenia jednej z zębatek w napędzie. Wrzuciłem filmik sprzed awarii i po, a także działanie czuników. Algorytm będę dokańczał wkrótce, gdy zdobędę źródło zębatek. Zdjęcia: Tył Przód Lewy bok Prawy bok Góra Spód Widoki ogólne W pudełku o boku wewnętrznym 50mm: Filmy: Test pchania, oba napędy działały, sterowane podwójnie modulowaną falą z pilota (dlatego tak wolno): Bączki na jednym sprawnym napędzie + test czujników białej lini: Test czujników ruchu: Przy budowie robota kierowałem się dwoma motywami - chęć pokazania, że można to zrobić stosunkowo tanio i skutecznie, drugi - pomoc w rozpowszechnieniu tej "zapomnianej" i niedocenianej na forum klasy. Wg. moich szacunków budowa robota sumo tej klasy wychodzi dużo taniej niż jego więksi bracia (a może nawet mniejsi), nie mniej jednak wymaga od twórcy trochę wprawy i pomysłowości. Wkrótce filmiki z całkiem sprawnym robotem. Czekam niecierpliwie na Wasze komentarze!

-
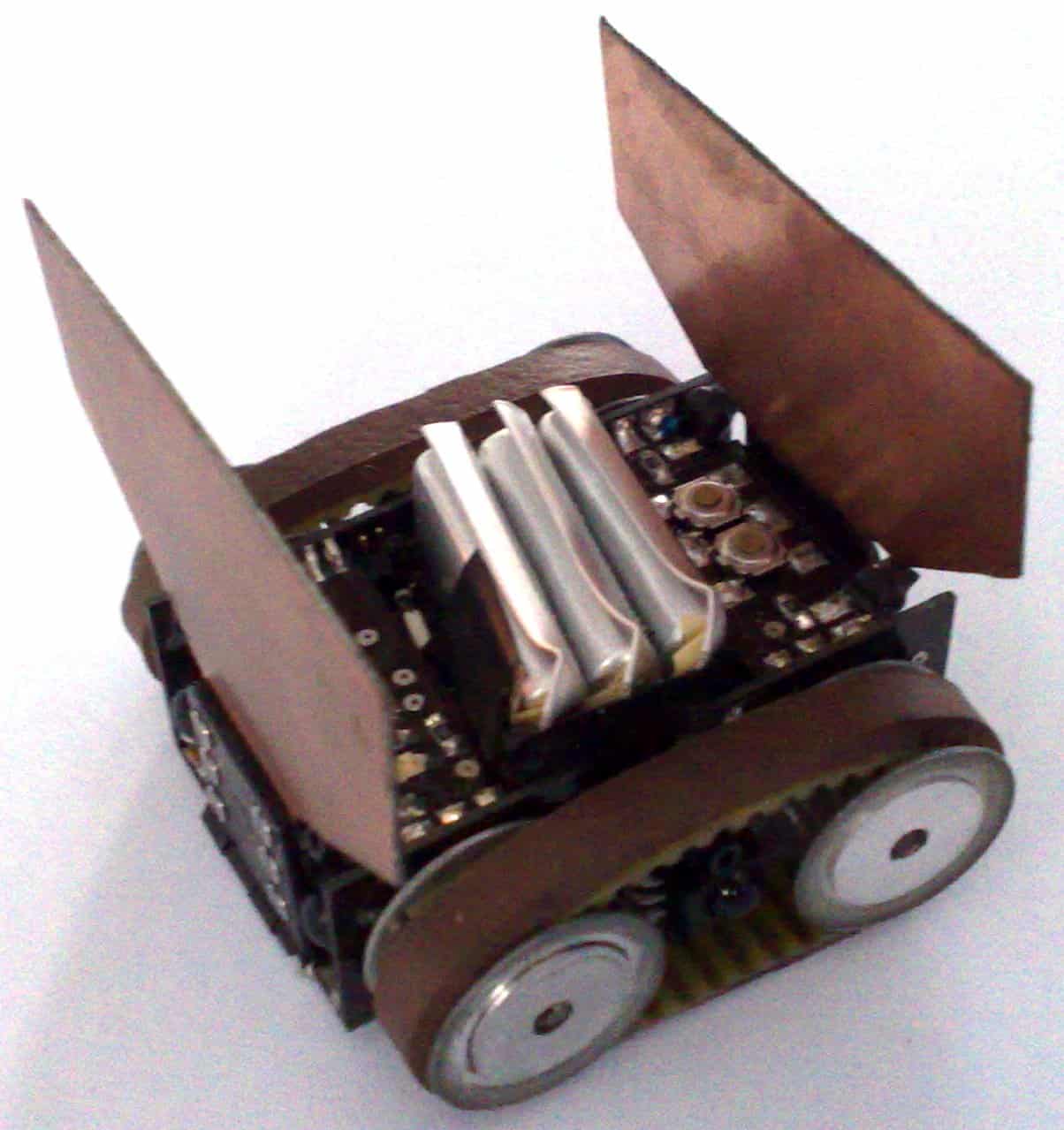
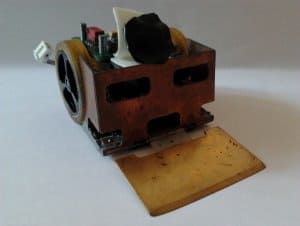
Przedstawiam mojego robota mikrosumo Destroyer. Robot powstał na początku 2009 roku z myślą o udziale w największych międzynarodowych zawodach robotów w Europie Robotchallenge w Wiedniu. Klasa mikrosumo jest jedną z najmniejszych klas robotów sumo biorących udział w zawodach. Prezentowany przeze mnie robot jest jednym z najlepszych robotów w Polsce i Europie co potwierdzają wyniki zawodów przedstawione na końcu postu. Projekt: Klasa mikrosumo narzuca ograniczenia wymiarów robota: 5cm x 5cm x 5cm. W klasie tej w przeciwieństwie do większych klas robotów sumo ograniczona jest wysokość robota. Waga robota ograniczona jest do 100gram. Projekt robota powstał w programie Autodesk Inventor. Rama robota wykonana jest z płytek drukowanych zlutowanych ze sobą "na kant". Robot napędzany jest dwoma niewielkimi silnikami prądu stałego z przekładniami. Jeden silnik napędza jedną gąsienicę a drugi drugą. Robot jest zaprojektowany tak, że może atakować przeciwnika zarówno przodem jak i tyłem. Mechanika: O mechanice nie będę dużo pisał, większość wyjaśniają zdjęcia poniżej. Robot po złożeniu i z trzema ogniwami (tak jak na zdjęciu) ważył niecałe 80 gram. W obecnej wersji zasilanie stanowi tylko jedno ogniwo, a w miejsce dwóch pozostałych ogniw (między silnikami) wstawiona została sztabka ołowiu i teraz robot waży 98gram. Elektronika: Dla bardziej zaawansowanych użytkowników, na schemacie robota nie będzie nic odkrywczego. Robot powstał gdy dopiero zaczynałem swoją przygodę z robotyką 🙂. Dla mniej zaawansowanych użytkowników polecam zapoznanie się opisem działania poniżej: „Mózgiem” robota jest procesor ATmega16L. Na płytce drukowanej znajdują się: złącze programatora ISP (jest to lista „goldpinów” w rastrze 1,27mm), cztery czujniki linii zbudowane na bazie transoptorów odbiciowych KTIR0711S, dwa mostki H Si9986CY sterujące silnikami. Dzielnik napięcia zbudowany jest z diody i rezystora, służy on do odczytywania za pomocą przetwornika ADC napięcia akumulatora i chronienia go przed nadmiernym rozładowaniem. Dwa mikroswitche i cztery diody LED służą do sygnalizacji pracy robota. W tym miejscu muszę zaznaczyć, że na schemat wkradł się błąd. Dwie diody LED podłączone są do wejść XTAL, które w mikrokontrolerze ATmega16 nie mają możliwości pracy jako PORT I/O, w przeciwieństwie do wyprowadzeń XTAL w ATmedze8, którą omyłkowo się zasugerowałem. Scalone odbiorniki podczerwieni TSOP32156 wraz z nadawczymi diodami IR tworzą czujniki wykrywania przeciwnika. Za pośrednictwem diod wysyłane są paczki 8 impulsów podczerwieni o częstotliwości 56kHz. Gdy światło podczerwone odbije się od przeszkody (robota przeciwnika) i dotrze z powrotem do odbiornika podczerwieni, to zgodnie z notą katalogową, odbiornik zmieni stan na nóżce OUT z wysokiego na niski i dzięki temu robot jest w stanie wykryć robota przeciwnika. Diody IR muszą być osłonięte, aby światło przez nie emitowane nie padało bezpośrednio na odbiornik, a dopiero po odbiciu od przeszkody. Muszą być również umieszczone pod odpowiednim kątem, aby światło nie odbijało się od powierzchni ringu. Poza tym na płytce znajdują się kondensatory filtrujące napięcie zasilania. Jest to bardzo ważne, ponieważ w pobliżu znajdują się silniki, które w trakcie pracy emitują zakłócenia elektromagnetyczne. Całość elektroniki oraz silniki zasilane są bezpośrednio z akumulatora zbudowanego z trzech połączonych równolegle ogniw litowo-polimerowych o napięciu 3,7V i pojemności 250mAh. Ponieważ napięcie zasilania wynosi zaledwie 3,7V (nominalnie), wszystkie elementy zostały dobrane tak, aby mogły pracować przy takim napięciu. Program: Pełny kod źródłowy programu został umieszczony w załączniku. W tym miejscu muszę zaznaczyć, że nie polecam wzorować się na moim programie innym użytkownikom. Program powstawał gdy dopiero zaczynałem się uczyć programować mikrokontrolery i jest on napisany bardzo nieelegancko 🙂. Zachęcam natomiast do zapoznania się z algorytmem walki. Ten kto to zrobi przekona się jak prosty i banalny może być algorytm sterujący robotem który od dwóch lat jest najleoszym robotem w Europie. Nie posiadam niestety, żadnych filmów z zawodów ani filmów przedstawiających robota w działaniu. Na youtube można obejrzeć kilka walk na filmikach z Robotchallenge Osiągnięcia: 2. miejsce na Robotchallenge 2009 1. miejsce na Robotchallenge 2010 Wyniki 2010 1. miejsce na Robotchallenge 2011 Wyniki 2011 1. miejsce na Robocomp 2011 Relacja Artykuł na temat robota ukazał się w miesięczniku Elektronika dla wszystkich:EdW 4/2010 Płytki robota można kupić w sklepie AVT: Sklep AVT - płytki program.txt

- 5 odpowiedzi
-
- 23
-





.JPG.931a83ea62e5067634d32b1deecfc743.JPG)