Przeszukaj forum
Pokazywanie wyników dla tagów 'Node.js'.
Znaleziono 2 wyniki
-
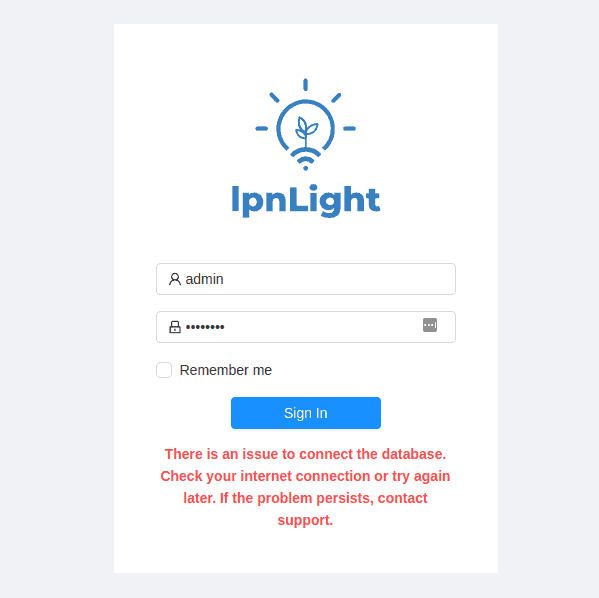
Firma LPN Plant poszukuję osoby do współpracy, która podejmie się naprawy problemu: Opis produktu LPN Light to inteligentny system oświetlenia zewnętrznego LED połączony z możliwościami Internetu Rzeczy. W pełni zdalny system, w którym każdy z elementów komunikuje się ze sobą bezprzewodowo, pozwala przełączać oraz sterować jasnością lamp w czasie rzeczywistym. Stack technologiczny: PostgreSQL, ChirpstackOS, GraphQL, Hasura, Node.js, React.js, Docker Opis problemu Po aktualizacji oprogrogramowania (z wykorzystaniem kontenerów w Dockerze) na urządzeniu klienta (do wersji 1.3.3), system ma problemy z połączeniem z bazą danych, a przez to blokuje możliwość zalogowania się do panelu dashboardu i sterowania lampami. Dokumenty wdrożeniowe oraz dotychczasowe wyniki zostaną udostępnione po podpisanu umowy NDA. Kontakt: careers@lpnplant.io tel: 790 573 075
-

Robot na Raspberry Pi z kamerą sterowany przez sieć
Programista3 opublikował temat w Projekty - DIY roboty
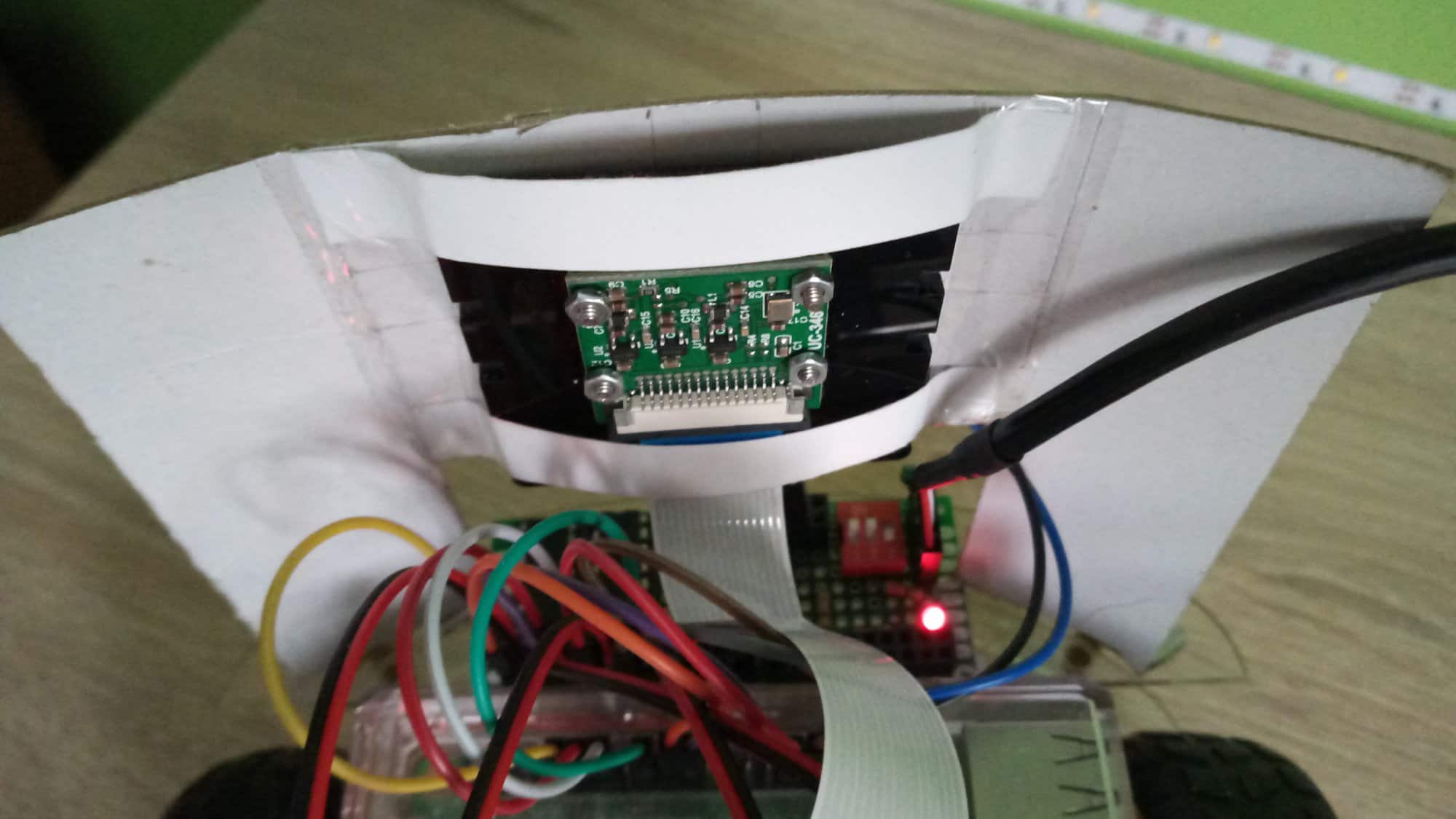
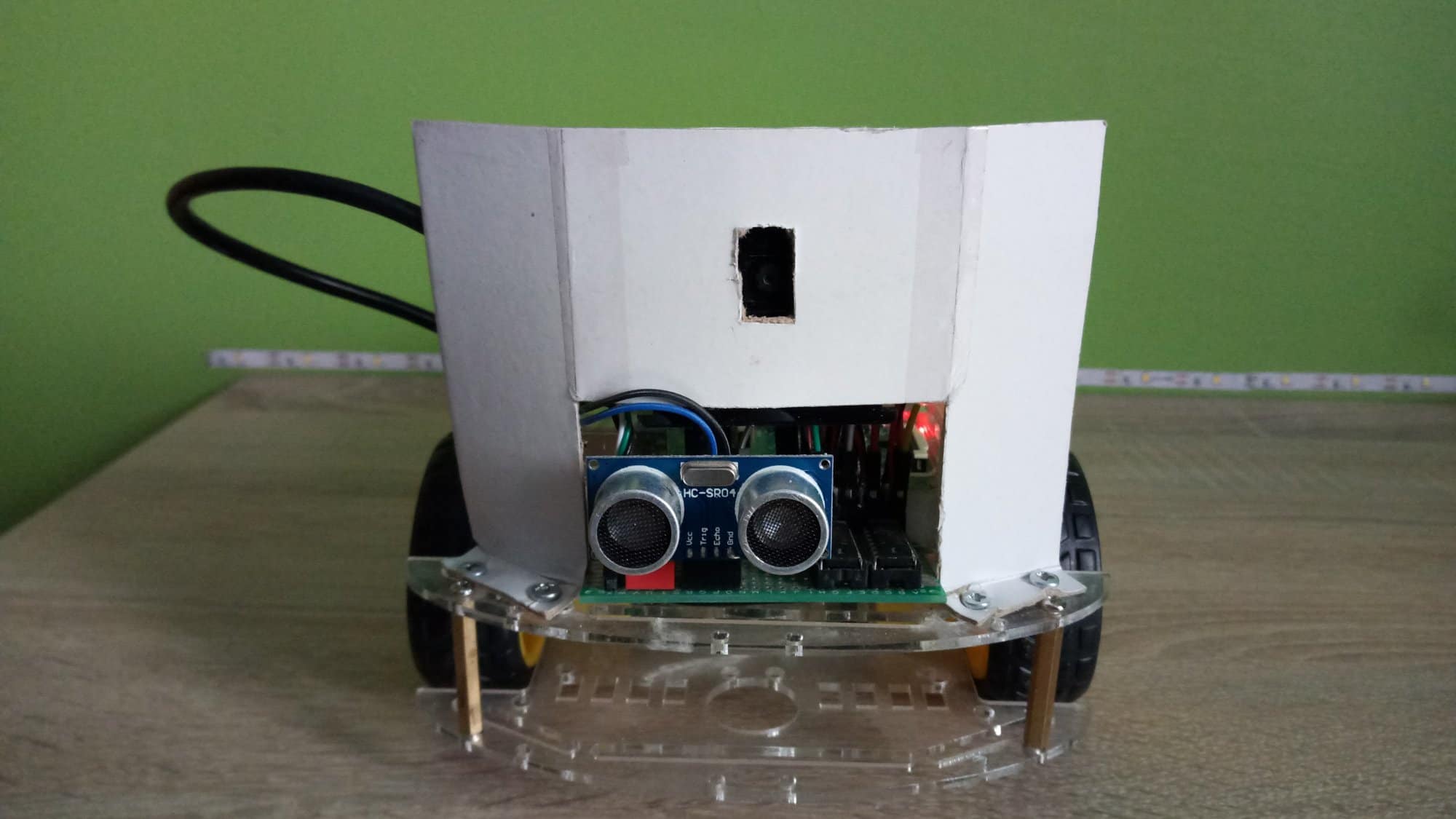
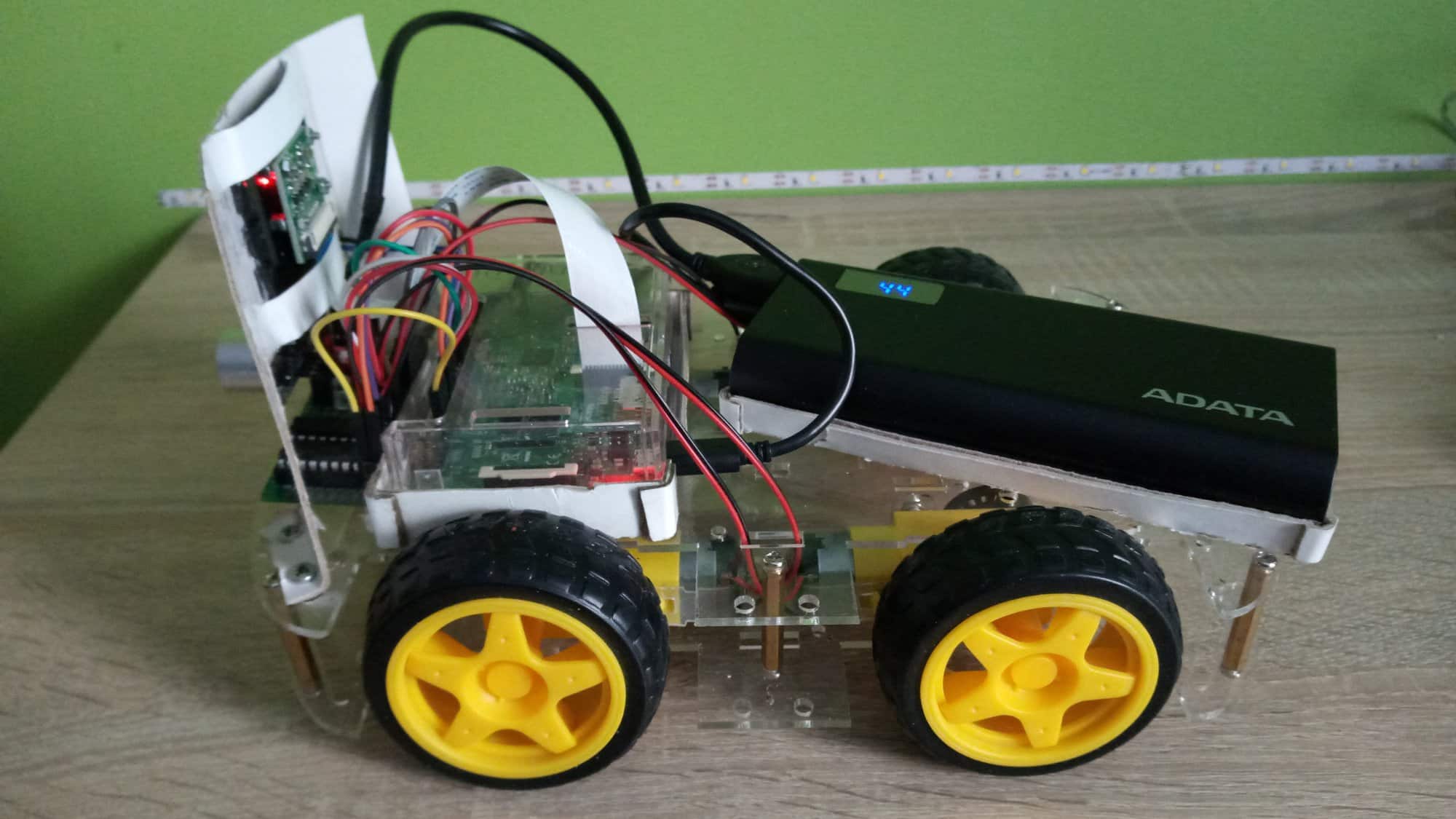
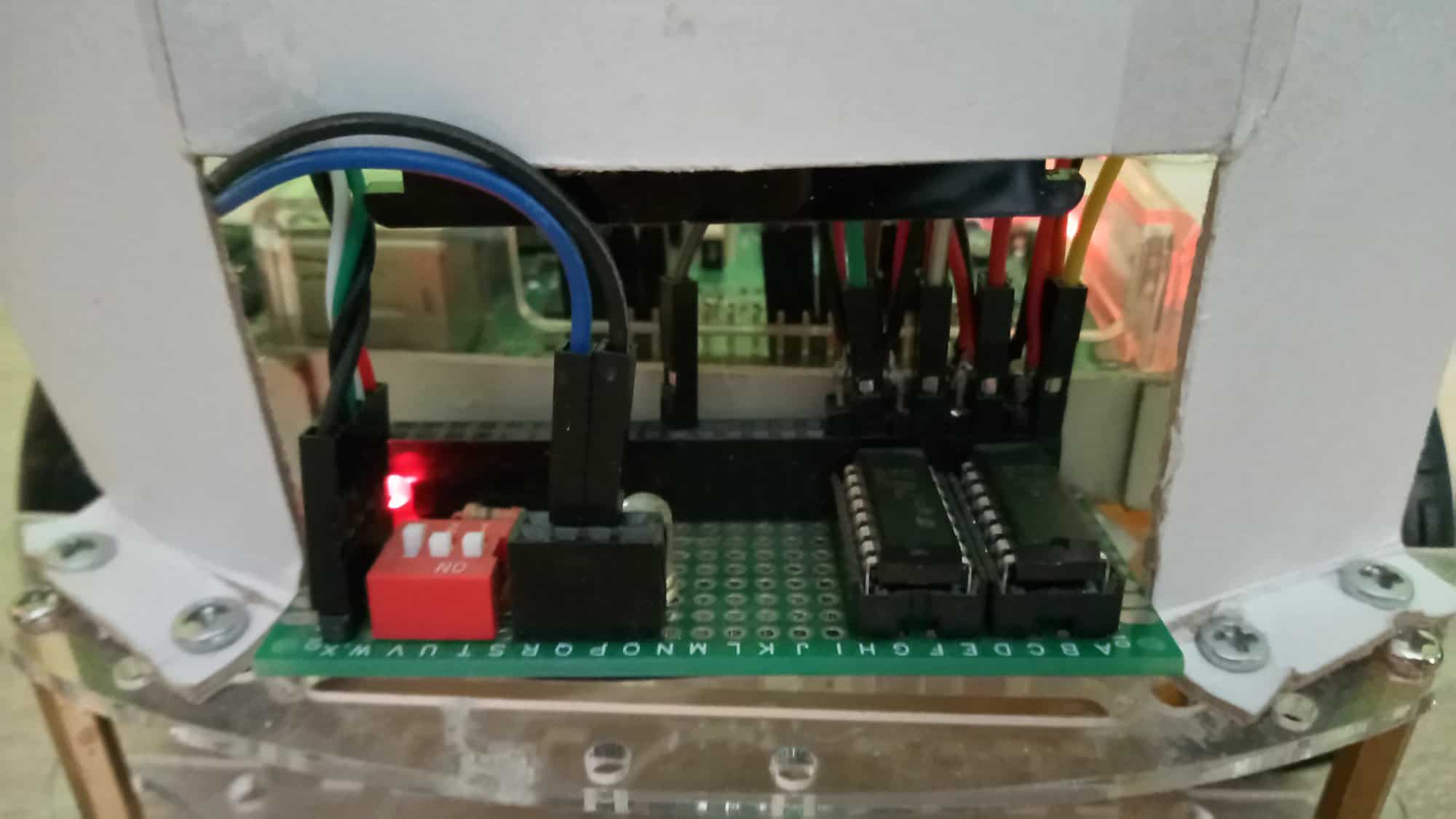
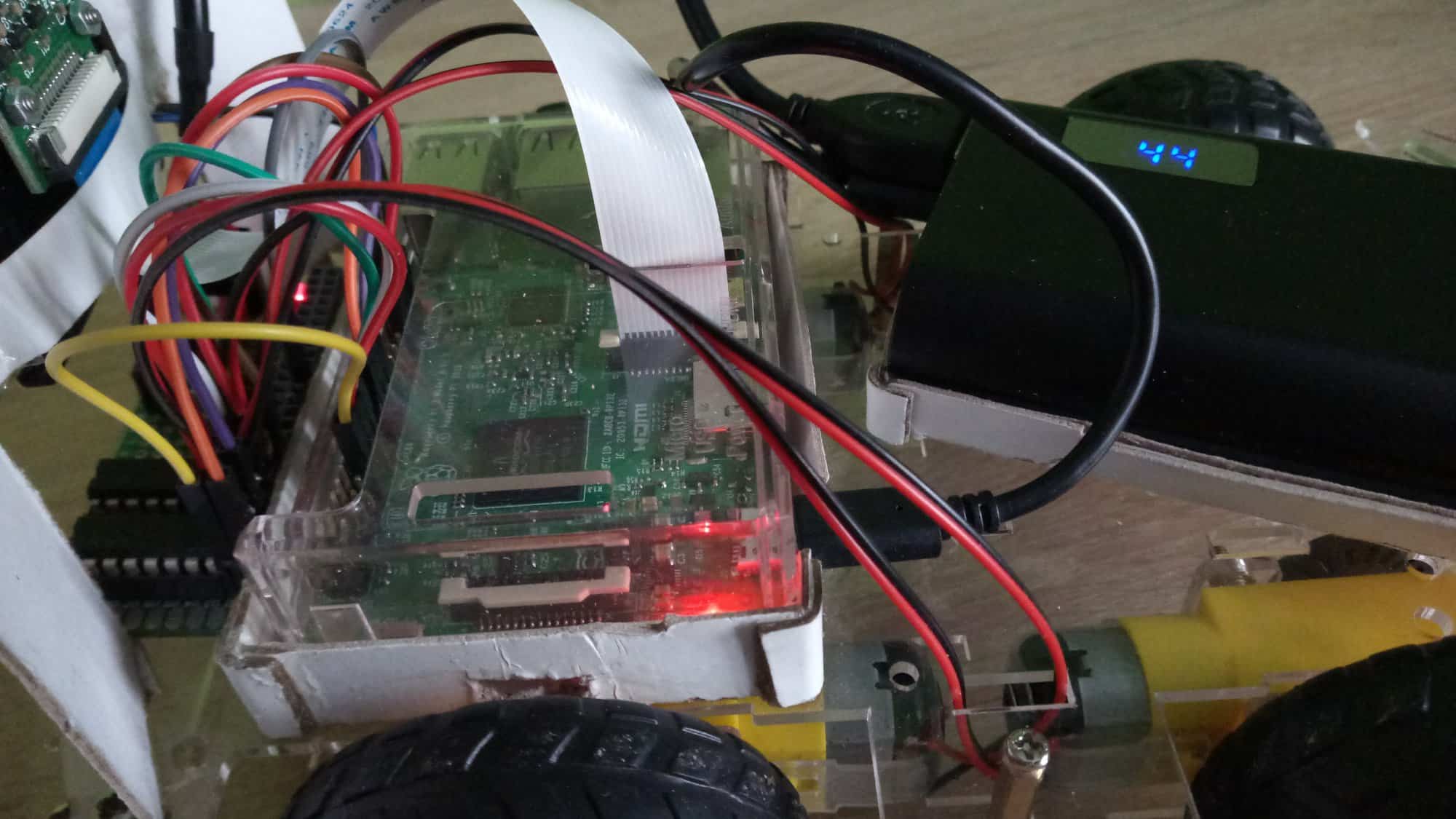
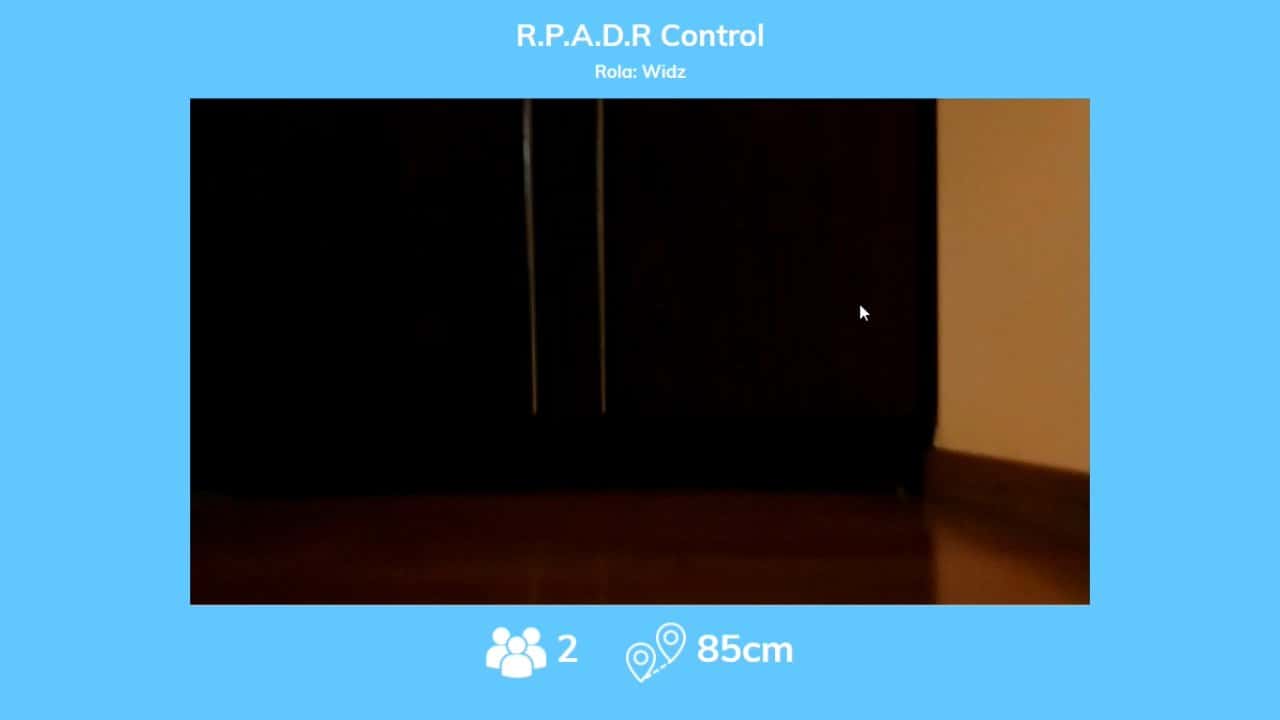
Chciałbym przedstawić swój kolejny projekt. Jest nim 4-kołowy robot oparty na Raspberry Pi. Robot posiada kamerę i ultradźwiękowy czujnik odległości oraz jest zasilany z powerbanka. Jako wygodną metodę sterowania robotem wybrałem sterowanie przez przeglądarkę www. Raspberry Pi łączy się z wifi i każde urządzenie w tej sieci może sterować robotem. Konstrukcja Podstawowe części z których składa się robot to: Raspberry Pi 3 model B 4-kołowe podwozie robota Kamera ArduCam dla Raspberry Pi Ultradźwiękowy czujnik odległości HC-SR04 Power Bank ADATA 12500mAh sterowniki silników L293D Raspberry Pi oraz powerbank umieszczone są na zrobionych własnoręcznie kartonowych podstawkach przykręconych do podwozia. Kamera również umieszczona jest na kartonowej konstrukcji. Robot zasilany jest z dwóch gniazd USB (jedno dla Raspberry Pi, drugie dla pozostałej elektroniki). Powerbank 12500mAh jest w stanie zapewnić kilka godzin pracy robota na jednym ładowaniu. Kamera oraz czujnik odległości umieszczony jest na przodzie robota. Sterowanie przez przeglądarkę www Sterowanie robotem odbywa się poprzez Node.js. Obraz z kamery streamowany jest za pomocą modułu raspivid-stream z wykorzystaniem WebSocketów na porcie 3000. Pozostała komunikacja odbywa się za pomocą socket.io na porcie 80. Serwer kontroluje klientów w taki sposób, że w danym momencie tylko jeden z nich może sterować robotem (według kolejności połączenia z serwerem). Pozostali klienci mogą tylko oglądać obraz transmitowany z kamery. Do sterowania wykorzystywana jest klawiatura (WSAD lub strzałki). Serwer przesyła do klientów również informację o odległości z czujnika ultradźwiękowego co sekundę. Widok z poziomu operatora: Widok z poziomu widza: Kod jest dość prosty. Po stronie serwera jest to podstawowe wykorzystanie modułu raspivid-stream i odczytu z czujnika odległości za pomocą modułu pigpio oraz trochę bardziej skomplikowane użycie socket.io do komunikacji i rpi-gpio do odpowiedniego sterowania silnikami. Po stronie klienta jest to głównie komunikacja za pomocą socket.io oraz obsługa zdarzeń klawiatury. Pliku projektu znajdują się w załączniku. Prezentacja wideo RaspberryPi_robot.rar