Przeszukaj forum
Pokazywanie wyników dla tagów 'RPi'.
Znaleziono 10 wyników
-

Czy kiedyś będzie kurs FORBOT o Raspberry Pi Pico (albo W)?
Marcelsky opublikował temat w Dyskusje o FORBOT.pl
Czy kiedyś będzie kurs FORBOT z mikrokontrolerem Raspberry Pi Pico (lub wersja W)? Przykładowe części: - wyświetlacz LCD - enkoder obrotowy - różne czujniki - diody LED - moduł RFID - matryca przycisków 4x4 - moduł przekaźnika - itp. Podobało mi się jak dobry był kurs elektroniki, a teraz dobrze by było wejść w mikrokontrolery. Pi Pico też jest tańsze niż np. Arduino Uno co pozwalało by na dodaniu więcej części do zestawu. Przepraszam, jeżeli ten temat nie pasuję do tej kategorii. -
Cześć, mam pomyśł na nowy kurs. Co powiecie na kurs RPi Pico? Myślę, że są osoby, które są zainteresowane tym tematem. 🙂
-
Hej, mam pewien problem ze zrobieniem łączności miedzy RPi a Arduino. Wymaganie są 3 rzeczy: komunikacja musi być dwukierunkowa oraz musi się odbywać bezprzewodowo oraz jeżeli Wi-Fi to w sieci lokalnej Cała komunikacja jest bardzo prosta: Rpi wysyła sygnał do Arduino, on rozpoznaje i wykonuje pewną sekwencje, gdy ją zakończy, ma wysłać sygnał o tym do Rpi. niestety połączenie fizyczne nie wchodzi w grę całość jest od siebie oddalone co prawda o 4 metry, ale nie ma jak poprowadzić przewodów. Może ktoś już robił coś takiego i może podzielić się swoim doświadczeniem. Jak na razie wyklarowały mi się następujące pomysły: 1) Użycie dwóch esp8266-01 i połączenie przez TX RX, komunikacja miedzy nimi przez np ESP-NOW 2) Użycie dwóch nrf24l01 3) Podłączenie do Arduino Esp8266 i komunikowanie sie przez stronę www(Esp hostuje stronę) 4) Użycie podczerwieni (nie wiem czy to zdało by egzamin) Nie chcę specjalnie skomplikować całego procesu, a mam wrażenie, że te moje pomysły do tego doprowadzą.
-
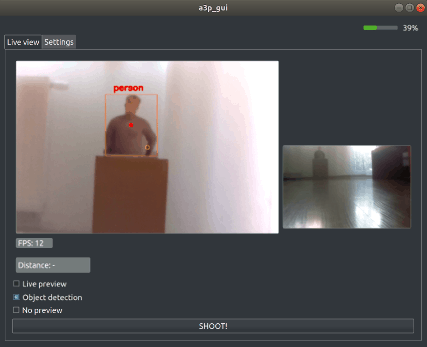
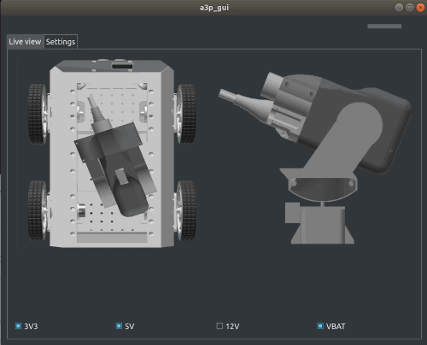
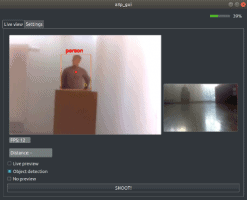
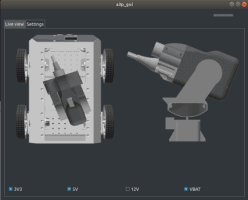
Cześć! Przedstawiam wam mój owoc lockdownu. Robot a3p jest czterokołową platformą wyposażoną w obrotową wieżyczkę z działkiem na sprężone powietrze, który przy wykorzystaniu openCV jest w stanie rozpoznawać i namierzać rozmaite cele. Mechanika Większość części została wykonana z PLA w technologii FDM przez Janka @Holgin, któremu serdecznie dziękuję. Montaż całej konstrukcji nośnej wymaga tylko 2 śrub. Reszta części montowana jest na wcisk (jaskółczy ogon). Konstrukcja jest prawidłowo sztywna oraz niewrażliwa na drgania mechaniczne, co świadczy o dobrej precyzji wykonania części. Koła montowane są na przesuwnych płytkach, co pozwala na regulację prześwitu. Konstrukcja kół zapewnia robotowi minimalną amortyzację. Warto wspomnieć o oponach, które również zostały wykonane na drukarce 3D (fiberflex). Minimalna szybkość druku i kolejne zerwania spowodowały, że był to zdecydowanie najtrudniejszy element do wykonania. Elektronika Platforma zasilana jest pojedynczą baterią LiPo 4S. Na potrzeby projektu wykonany został dedykowany moduł zarządzania mocą. Płytka oparta jest o STM32 i pozwala na selektywne włączanie 4 sekcji zasilania (3v3, 5v, 12v i vbat). Moduł dokonuje róznież pomiaru napięcia każdego ogniwa baterii oraz mierzy prąd płynący przez sekcję vbat (tam podłączone są silniki). Za projekt PCB ponownie dziękuję @Holgin. Za kontrolę peryferiów odpowiadają 2 raspberry pi (3B+ dla pojazdu, Zero W dla wieżyczki). Każde koło napędzane jest szczotkowym silnikiem DC (12V, 90RPM). Ruch wieżyczki realizowany jest za pomocą silnika krokowego (obrót) oraz serwa modelarskiego (góra-dół). Zakres ruchów to 360° w poziomie oraz 40° w pionie. Działko pneumatyczne zostało zaadaptowane z gotowego chińskiego airsoftu (napęd to szczotkowy silnik DC). Kamery to: Raspberry Pi Camera v2 (przód) oraz IR-CUT OV5647 (wieżyczka). Odległość do celu mierzona jest poprzez analizę odległości oraz kąta pomiędzy 2 plamkami lasera. Realizowane jest to za pomocą dwóch wskaźników laserowych i pozwala mierzyć dystans w zakresie 1-4 m. Oprogramowanie Komunikacja pomiędzy modułami oparta jest o framework ROS (Melodic). Za analizę obrazu odpowiedzialna jest biblioteka OpenCV. Robot może rozpoznawać obiekty dzięki gotowym sieciom ssd_mobilenet_v2 lub yolov3. Do wykrywania prostych okręgów wykorzystana została transformacja kołowa Hougha. Robot jest kontrolowany za pomocą desktopowego GUI (Qt5). W zakładce Live view widoczny jest obraz z obu kamer, aktualna liczba klatek dla kamery wieżyczki oraz odległość do celu. Możliwa jest tutaj zmiana trybu kamery oraz wydanie rozkazu strzału. W zakładce Settings mamy kontrolę nad sekcjami zasilania oraz możemy podejrzeć aktualną pozycję wieżyczki względem ramy robota. Kod projektu można znaleźć tutaj. Kod modułu zarządzania mocą tutaj. Zachęcam do pytań i oceny projektu. Pozdrawiam, Tomek
- 5 odpowiedzi
-
- 15
-

-

-
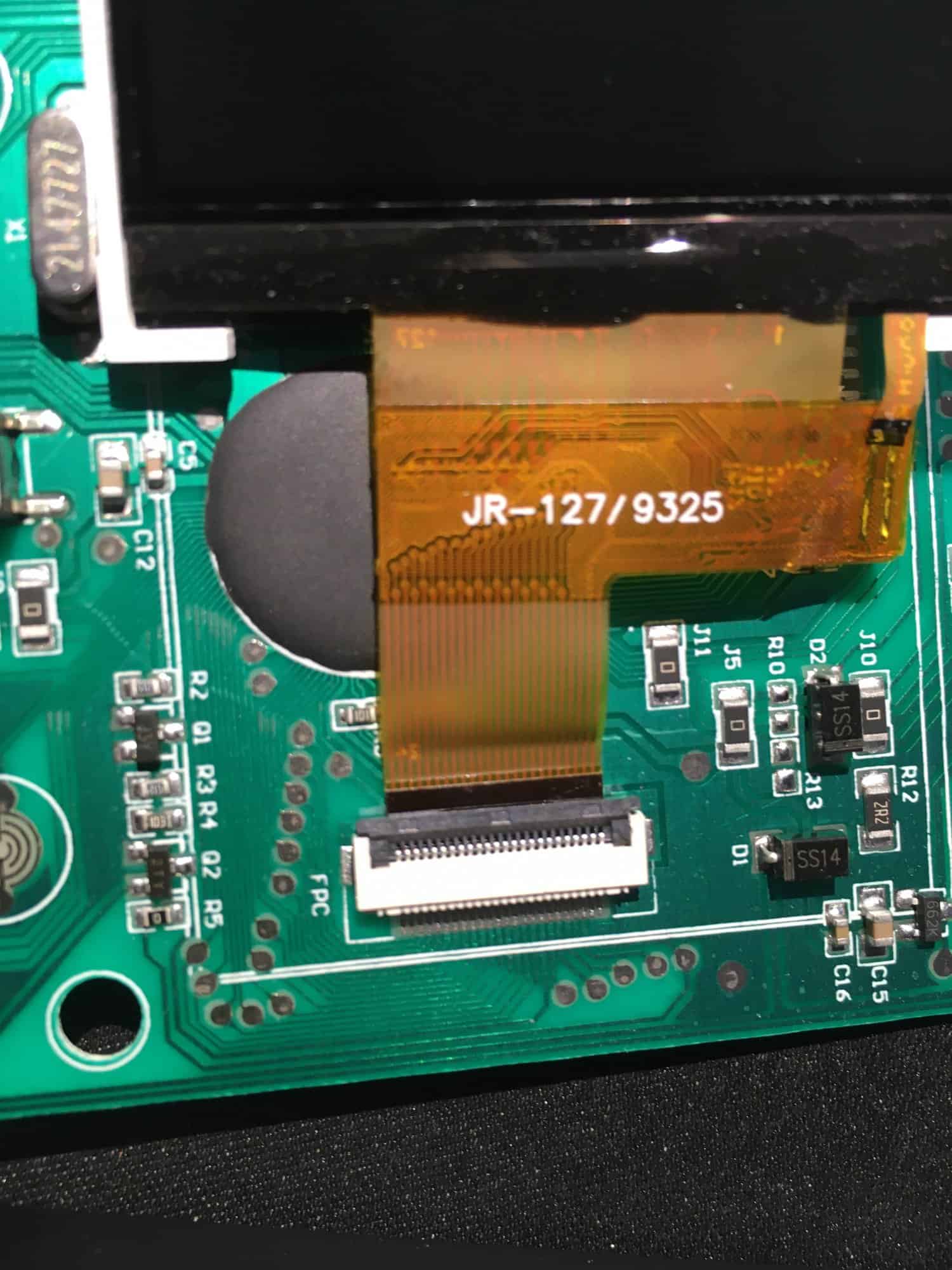
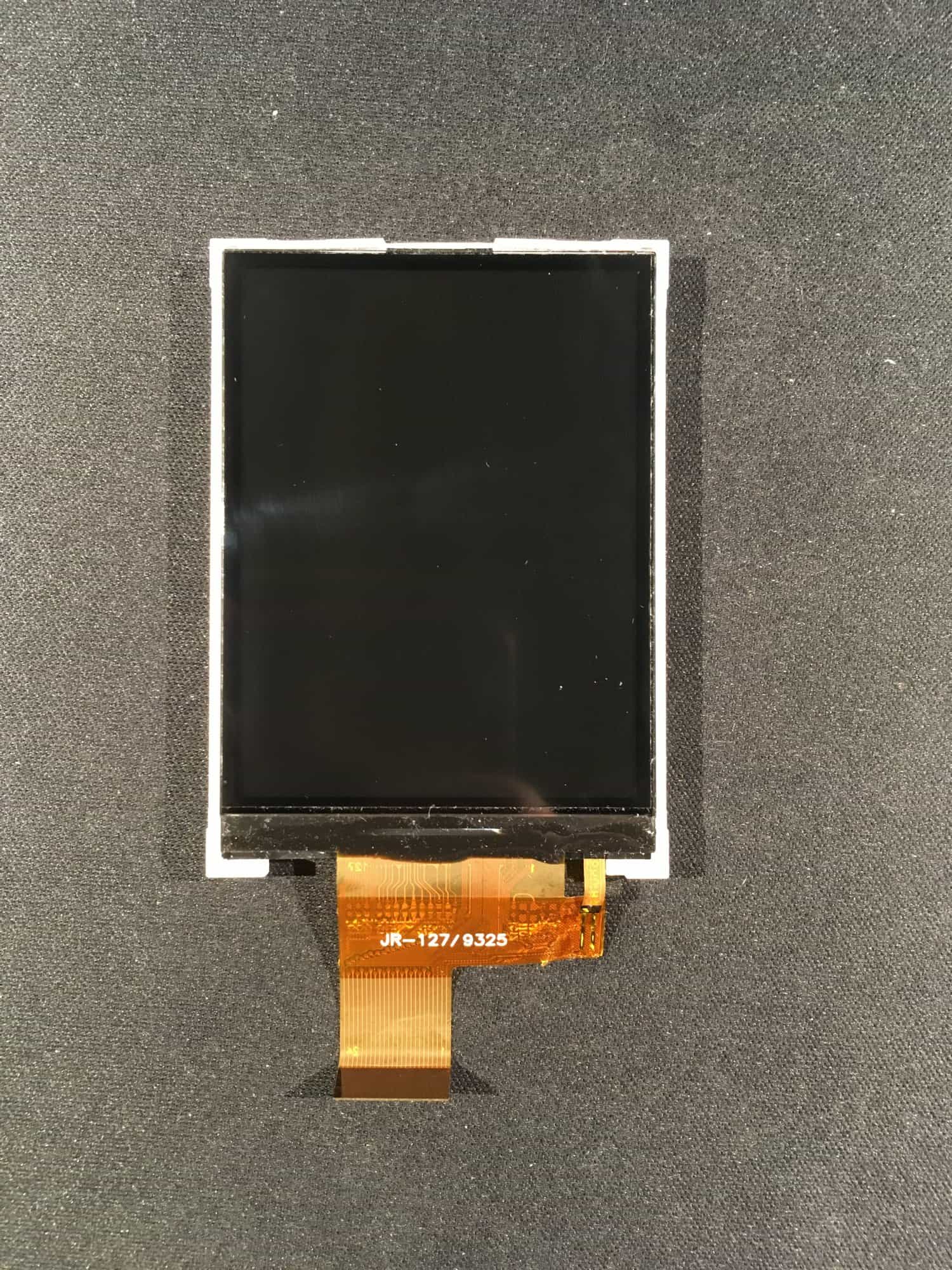
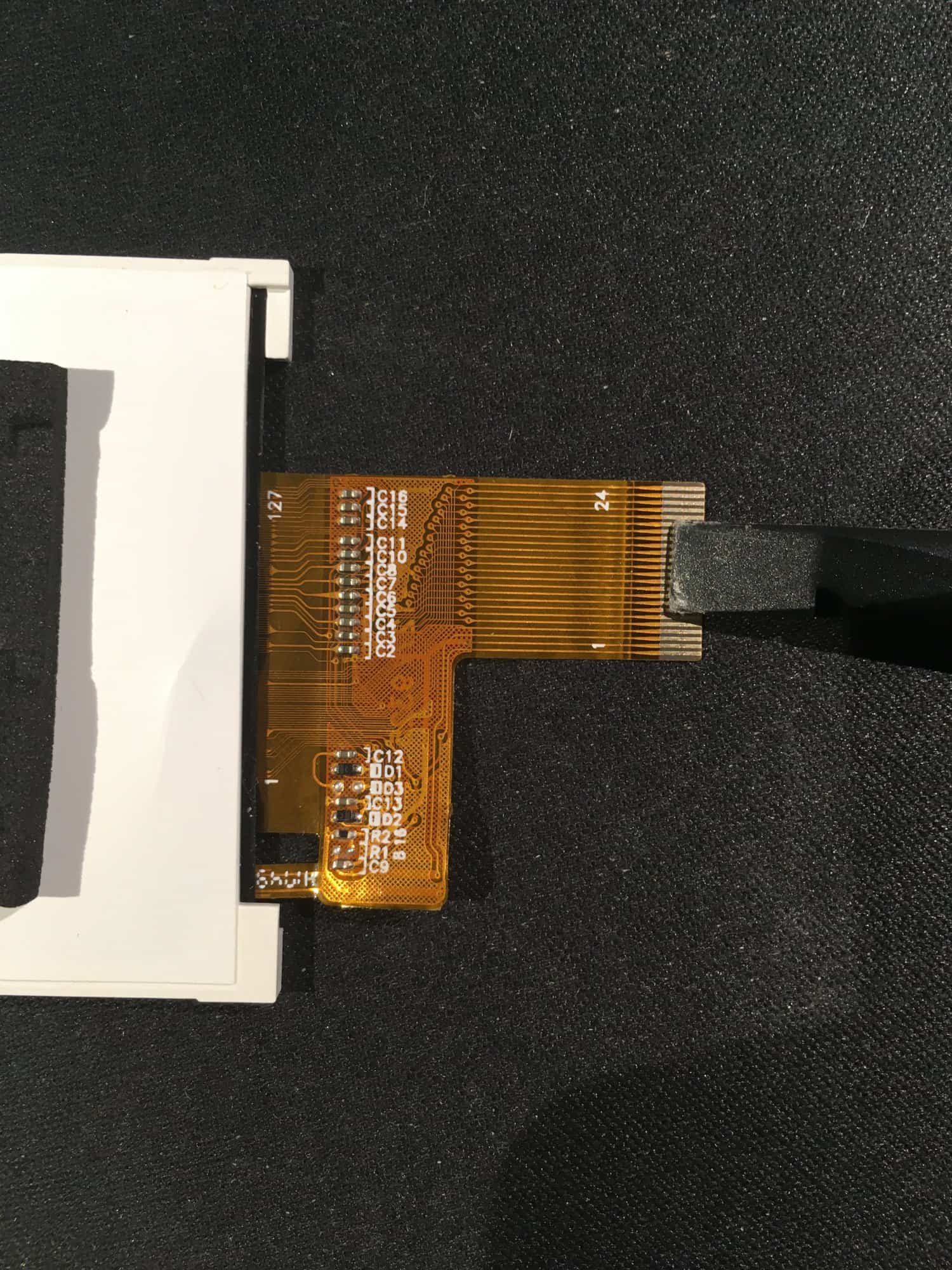
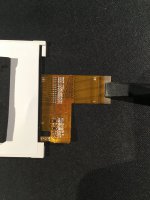
Cześć, Zdobyłem się na ambitny plan stworzenie konsolki przenośnej na bazie RPi0 (coś pokroju projektu GameBoy Zero), postanowiłem trochę zaoszczędzić kupując już taką gotową konsolkę (klona z technologią NES on a chip), żeby ew. na wyciągać z niej jak najwięcej części które bym mógł podłączyć do RPi0. Największym problemem na jaki natrafiłem a zarazem mnie zaintrygował jest wyświetlacz 2.8" który jest podłączony 24 pinowym złączem do płytki drukowanej tej konsolki. Trochę szperałem i jedyne co znalazłem to że prawdopodobnie ekran jest na sterowniku ILI9341 (na aliexpres znalazłem coś bardzo podobnego do tego co posiadam : https://bit.ly/2yaePuz , oraz : https://bit.ly/3audRrx ten jest mniejszy ale ma dokładnie takie same wyprowadzenia i lepiej opisane) Szukam jak można by było ten ekran podłączyć do rpi, czy można by było to zrobić bezpośrednio czy trzeba zdobyć jakiś konwerter żeby to podłączyć ? Zdjęcia ekranu i kawałka płyty do której jest podłączony : https://imgur.com/a/PpQhvwo Dzięki za wszelką pomoc 😁


-

Raspberry - podstawowe informacje, dobór rozwiązań do projektu
Magdalenaa opublikował temat w Raspberry Pi
Cześć To mój pierwszy wpis na forum, 😊 rok temu zaczęłam studia na politechnice, naukę rozpoczęłam od mikrokontrolerow AVR. Dziś już wiem, że chce kontynuować naukę polegajac na raspberry niestety nie mam o nich kompletnie żadnej wiedzy. Mam plan wykonać projekt obrony pracy w oparciu o ten minikomputer dlatego chciałabym przez najbliższy rok poznać go dość dobrze ☺moim planem jest stworzenie programu zaawansowanego graficznie który będzie się otwierał automatycznie po uruchomieniu malinki. Zaawansowany graficznie czyli program wspierający obsługę wysokiej rozdzielczosci animacji. Stosowanie wlasnych obiektow takich jak progres bar, przyciski itp. ( nie chce korzystac z default'owych ze wzgledu na bardzo nieatrakcyjny wyglad 😐). Wiem tez ze konieczna bedzie wspolpraca malinki z UARTem. ponieważ wielu z Was ma wielkie doświadczenie proszę na początek o poradę w kilku kwestiach: 1. Czy lepiej kupić mailnke wersji 4 czy 3 ? Pomijając koszty, osobiście myślę że lepiej kupić bardziej przyszlosciowa płytkę wiec skłaniam się ku najnowszej wersji. Niestety większość informacji na forach dotyczy wersji 3 i obawiam się czy oby na pewno wszystkie informacje będą kompatybilne z najnowszym projektem. 2. Jaki system operacyjny zastosować do swojego projektu i jakie są ich plusy /minusy. Początkowo myślałam o windowsie chociaż Internet mówi tylko o wadach tego systemu. Szkoda bo dość dobrze radzę sobie w Visual studio i znam ten system dość dobrze. Mimo wszystko chętnie uczę się nowych rzeczy wiec jeśli waszym zdaniem Windows się nie nadaje to proszę mówić o tym wprost 😄 3. Najważniejsze... w jakim programie / środowisku należy pisać programy na raspberry Tak aby idealnie nadawały się do mojego projektu. Jak wspomnialam wcześniej dobrze czuje się w Visual studio, mam też trochę wiedzy na temat języka C, C#. Może da się to jakoś wykorzystać? z góry dziękuję za waszą pomoc i jestem wdzięczna za zaangażowanie 😊 -
Dzień Dobry Forumowicze! Problem dotyczy zarówno mikrokontrolera, jak i RPi, więc mam nadzieje że nie będzie problemu związanego z nieodpowiednim działem. Od kilku dni borykam się bezskutecznie z pewnym problemem, a prezentuje się on następująco: Potrzebuję wymienić dane poprzez SPI między Raspberry Pi Zero W (Master), a Atmegą64(Slave). Atmega zasilana przez 5V na własnoręcznie zaprojektowanej płytce (z konwerterem poziomów logicznych 3,3V-5V na MOSFET'ach). Generalnie elektrycznie wszystko jest sprawne i sprawdzone kilkukrotnie, więc to odpada. Jestem w stanie zaprogramować AVR'a przez RPi za pośrednictwem SPI właśnie (na RPi Rasbian w wersji 9), z wykorzystaniem AVRDUDE. Problem jaki się pojawia, to przy próbie wymiany danych między nimi. AVR'a programuje w C, natomiast RPi w Pythonie (kody programów niżej). Polega on na tym, że biblioteka Python'a SpiDev, jako sygnał ChipSelect podaje stan wysoki, podczas gdy ATMEGA wymaga podczas tej komunikacji stanu niskiego. Atmega nie posiada możliwości zmiany trybu na taki, aby czytała stan wysoki, a biblioteka SpiDev z kolei, nie ma funkcjonalności podania stanu niskiego. Chciałem to obejść poprzez podpięcie nóżki Atmegi pod zupełnie inną nóżkę RPi i ręcznego wysterowywania tej nóżki przed nadaniem paczki danych, jednak to nie działa - nie wiem jednak dlaczego. Nie używałem nigdy wcześniej SPI, więc finalnie nie jestem nawet pewien gdzie leży problem - czy w kodzie Slav'a, Mastera czy zupełnie gdzie indziej. Slave (C, Amtega64): #define F_CPU 1000000UL #include<avr/io.h> #include<util/delay.h> #include<avr/interrupt.h> #define ustaw(bajt, nr_bitu) (bajt |=(1<<nr_bitu)) #define skasuj(bajt, nr_bitu) (bajt &=~(1<<nr_bitu)) #define sprawdz(bajt, nr_bitu) ((bajt &(1<<nr_bitu))&&1) #define sleep(czas) for (int i=0; i<(czas); i++) _delay_ms(1) int data=500; void init_spi(void) { DDRB=(1<<PB3); //MISO - output SPCR=(1<<SPE)|(1<<SPIE); //SPI_ON & Interrupt SPDR=0; } uint8_t rec_spi(void) { while (!(SPSR & (1<<SPIF))) ; return SPDR; //return data register } int main(void) { sei(); init_spi(); DDRC |=1<<PC3; //LED'y DDRC |=1<<PC4; DDRC |=1<<PC5; while (1) { ustaw(PORTC, PC4); sleep(data); skasuj(PORTC, PC4); sleep(data); } } ISR (SPI_STC_vect) { data = rec_spi(); ustaw(PORTC,PC5); } Master (Python, RPi): import RPi.GPIO as GPIO import spidev import time GPIO.setmode(GPIO.BCM) GPIO.setup(7, GPIO.OUT) GPIO.output(7, GPIO.HIGH) spi = spidev.SpiDev() spi.open(0, 0) print('Open SPI') #GPIO.output(7, GPIO.LOW) data = 0xAA try: while True: print('Sending..') GPIO.output(7, GPIO.LOW) spi.xfer([data], 50000, 100, 8) # spi.writebytes([250]) GPIO.output(7, GPIO.HIGH) print('complete') time.sleep(2) #end while except KeyboardInterrupt: # sleep(0.1) spi.close() GPIO.cleanup() Na masterze (RPi) próbowałem ustawiać różne tryby (spi.mode), różne prędkości, próbowałem z spi.writebytes oraz z spi.xfer. Wszystko bez skutku. Na Atmedze, mrugam diodą co pół sekundy. Próbowałem osiągnąć taki efekt, by wysłać liczbę 250 i ustawić ją jako czas mrugania, co zauważyłbym jako szybsze mruganie diody. Próbowałem też zapalić inną diodę w przerwaniu od SPI - wszystko bezskutecznie. SPI w FuseBitach jest aktywne. Połączenia elektryczne są poprawne, przy czym Atmegowski SS jest podłączony do 7 pinu RPi. Byłbym bardzo wdzięczny za wszelką pomoc i sugestie. Pozdrawiam.
-
Witajcie! Z góry chciałbym podkreślić iż jestem JESZCZE zielony w całej tematyce Raspberry Pi. Nie mniej jednak wiedzę zbieram, robie kursy i staram się rozwijać. Malinkę kupiłem celem budowy skanera do taśmy filmowej 8mm i 16mm. Projekty znalazłem na GitHub i w innych źródłach. Wszystko byłoby pięknie ładnie gdyby nie potrzeba obiektywu makro do kamery Rpi V2, który ciężko znaleźć... Czy macie może jakieś źródła/dojścia gdzie mógłbym dostać kompatybilny obiektyw do Rpi Cam. v2 z regulacją ostrości który umożliwi skan klatki filmowej od rozmiaru 8,00mm x 3,30mm do 16,00mm x 7,50mm?
-
Czy ktoś instalował na RPi Windows 10 loT? Jak to można zrobić?
-
Chciałem podłączyć RPi przewodem Ethernet do PC, który jest przez WiFi podłączony do routera. Tworzę ssh, sprawdzam czy jest, przekładam do RPi, odpalam jak to jest w opisie kursu i nie mam łączności. Proszę o podpowiedź.