Przeszukaj forum
Pokazywanie wyników dla tagów 'STM32F103C8T6'.
Znaleziono 3 wyniki
-

STM32F103 + CAN -> procek nie wypuszcza ramki z banków FIFO
amilo_pa opublikował temat w Mikrokontrolery
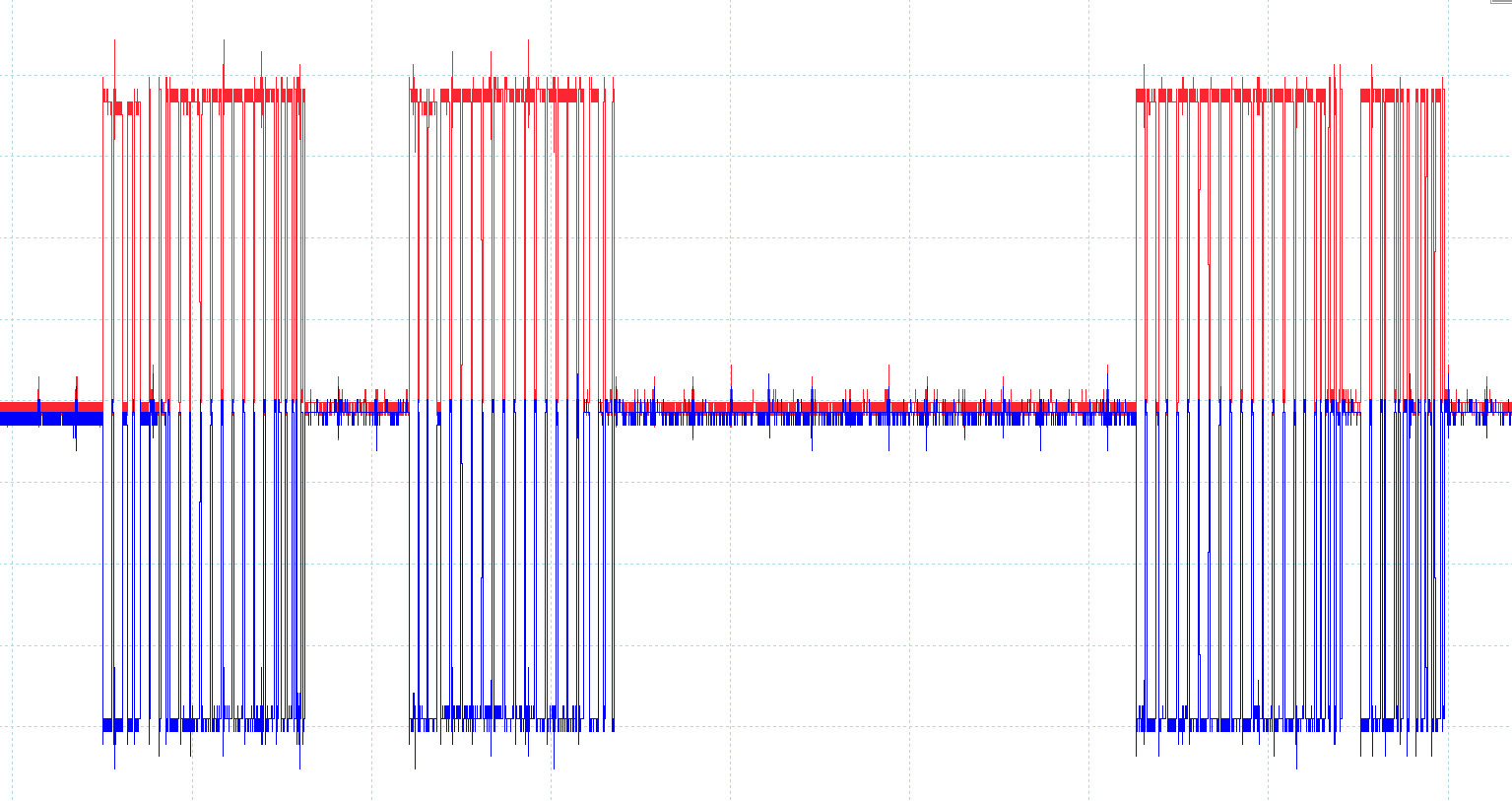
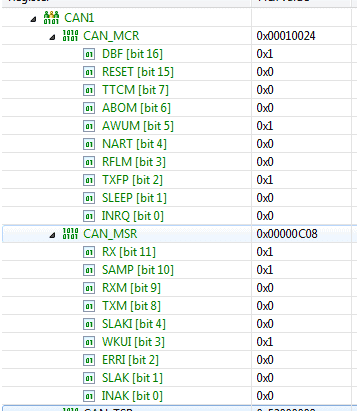
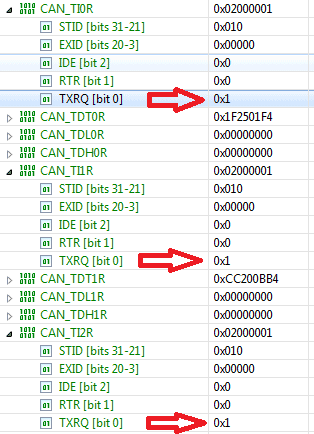
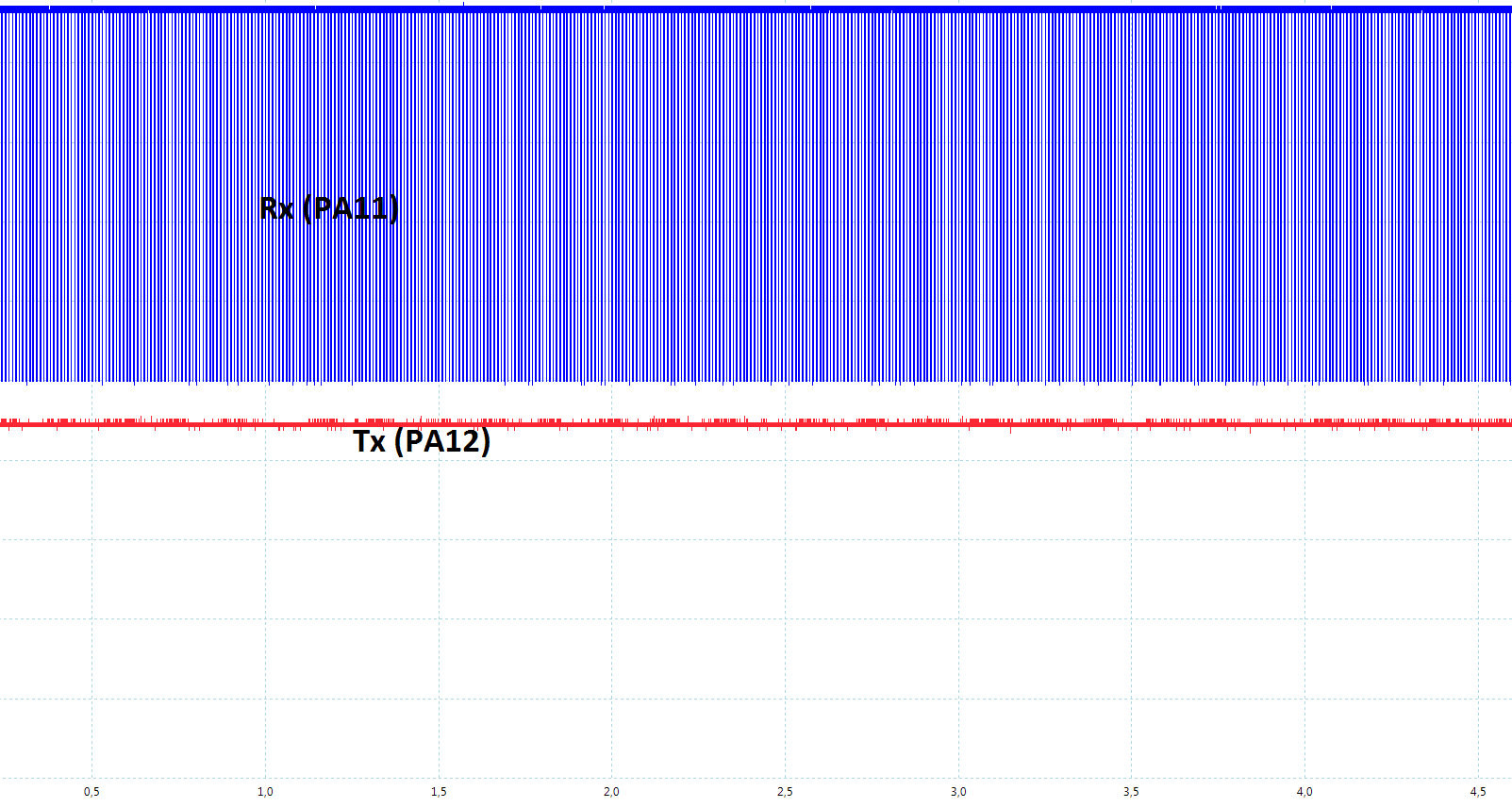
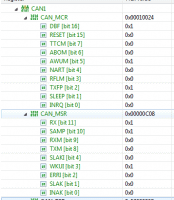
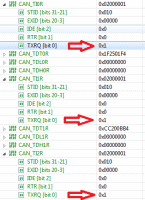
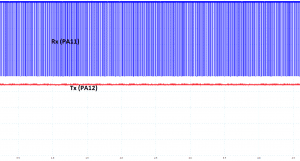
Hej wszystkim, Mam mały problem z zaimplementowaniem protokołu CAN na STM32F103 (tzw bluepillu). Ale po kolei. Mam Bluepilla podłączonego poprzez PA11 (CAN_Rx) i PA12 (CAN_Tx) do transceivera CJMCU-1051 (wejscia CRX -> PA11 i CTX -> PA12 ). Sygnały CANL oraz CANH wychodzące z transceivera) mam połączone z magistralą CAN na któej są już dwie nody i komunikują się ze sobą z baudratem = 500kBps (po sieci biegają 4 ramki): Więc sieć dzial. I teraz mój kod. Konfiguracja zegarów na maksymalne taktowanie - 72MHz ( PCLK1 zgodnie z RM ustawone na 36MHz): void RCC_Conf(void) { // RCC setting reset RCC_DeInit(); // Turn on HSE RCC_HSEConfig(RCC_HSE_ON); // Wait up to HSE will be ready HSEStartUpStatus = RCC_WaitForHSEStartUp(); if(HSEStartUpStatus == SUCCESS) { /* * the introduction of delays is (waitstate) for higher clock rates * is due to the maximum frequency with which it is performed * communication with Flash memory can be 24 MHz */ FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); // wait for flash memory FLASH_SetLatency(FLASH_Latency_2); // HCLK = SYSCLK RCC_HCLKConfig(RCC_SYSCLK_Div1); // PCLK2 = HCLK RCC_PCLK2Config(RCC_HCLK_Div1); // PCLK1 = HCLK/2 RCC_PCLK1Config(RCC_HCLK_Div2); // PLLCLK = 8MHz * 9 = 72 MHz RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9); // Turn on PLL RCC_PLLCmd(ENABLE); // Wait up to PLL will be ready while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET); // Select PLL as source of clock RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); // Wait up to PLL will be the source of clock while(RCC_GetSYSCLKSource() != 0x08); // Turn on Włączenie clock signal supervision system //RCC_ClockSecuritySystemCmd(ENABLE); } } SysTick skonfigurowany na 1ms: void SysTick_Conf (void) { SysTick_Config(F_PCLK2/8/1000); SysTick->CTRL &= ~SysTick_CTRL_CLKSOURCE_Msk; } No i czas na konfigurację CANa: void CAN_Config(void) { GPIO_InitTypeDef GPIO_InitStructure; uint8_t ststus = 10; /* Configure CAN1 IOs **********************************************/ /* GPIOA and AFIO clocks enable */ RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOA, ENABLE); /* Configure CAN1 RX pin */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//GPIO_Mode_IPU//GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure) /* Configure CAN1 TX pin */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); /* Configure CAN1 and CAN2 **************************************************/ /* CAN1 and Periph clocks enable */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE); /* CAN1 and CAN2 register init */ CAN_DeInit(CAN1); // CAN_DeInit(CAN2); /* Struct init*/ CAN_StructInit(&CAN_InitStructure); /* CAN1 and CAN2 cell init */ CAN_InitStructure.CAN_TTCM = DISABLE; CAN_InitStructure.CAN_ABOM = DISABLE; CAN_InitStructure.CAN_AWUM = ENABLE;//DISABLE; CAN_InitStructure.CAN_NART = DISABLE; CAN_InitStructure.CAN_RFLM = DISABLE; CAN_InitStructure.CAN_TXFP = ENABLE; CAN_InitStructure.CAN_Mode = CAN_Mode_Normal; CAN_InitStructure.CAN_SJW = CAN_SJW_4tq; CAN_InitStructure.CAN_BS1 = CAN_BS1_8tq; CAN_InitStructure.CAN_BS2 = CAN_BS2_3tq; /* 500KBps */ CAN_InitStructure.CAN_Prescaler =12; /*Initializes the CAN1 and CAN2 */ ststus = CAN_Init(CAN1, &CAN_InitStructure); // CAN_Init(CAN2, &CAN_InitStructure); /* CAN1 filter init */ CAN_FilterInitStructure.CAN_FilterNumber = 1; CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask; CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit; CAN_FilterInitStructure.CAN_FilterIdHigh = 0x1; CAN_FilterInitStructure.CAN_FilterIdLow = 0x0000; CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0x0000; CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0x0000; CAN_FilterInitStructure.CAN_FilterFIFOAssignment = 0; CAN_FilterInitStructure.CAN_FilterActivation = ENABLE; CAN_FilterInit(&CAN_FilterInitStructure); TxMessage.StdId = 0x10; TxMessage.ExtId = 0x00; TxMessage.RTR = CAN_RTR_DATA; TxMessage.IDE = CAN_ID_STD; TxMessage.DLC = 4; } w odpowiedzi na wywołanie funkcji ststus = CAN_Init(CAN1, &CAN_InitStructure); dostaję wartość1 czyli CAN_InitStatus_Success, co potwierdzają rejestry: W głównej pętli programu chcę wysyłać ramkę co 1s, zmienna source_time jest to zmienna inkrementowana w przerwaniu od SysTicka i to ją chcę wysyłać po magostrali while (1) { if(flag_) { TxMessage.Data[0] = (uint8_t)(source_time >> 24); TxMessage.Data[1] = (uint8_t)(source_time >> 16); TxMessage.Data[2] = (uint8_t)(source_time >> 8); TxMessage.Data[3] = (uint8_t)source_time; temp1 = CAN_Transmit(CAN1, &TxMessage); temp2 = CAN_GetLastErrorCode(CAN1); TransmitStatus[0] = CAN_TransmitStatus(CAN1,0); TransmitStatus[1] = CAN_TransmitStatus(CAN1,1); TransmitStatus[2] = CAN_TransmitStatus(CAN1,2); flag_ = 0; } } Rezultatem jest ustawienie się statusu transmisji na (wartość zwraca przez funkcję CAN_TransmitStatus) na pending dla wszystkich banków FIFO, co potwierdzają rejestry Po podłączeniu sond oscyloskopu pomiędzy uP a transceiver, można zaobserwować, że transceiver przepuszcza ramki biegające po CANie -> więc nie jest uszkodzony Reasumując, może ma ktoś pomysł dlaczego STM nie wypuszcza ramki do transcivera tylko jest cały czas w trybie pending?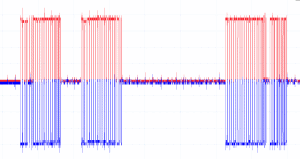
-
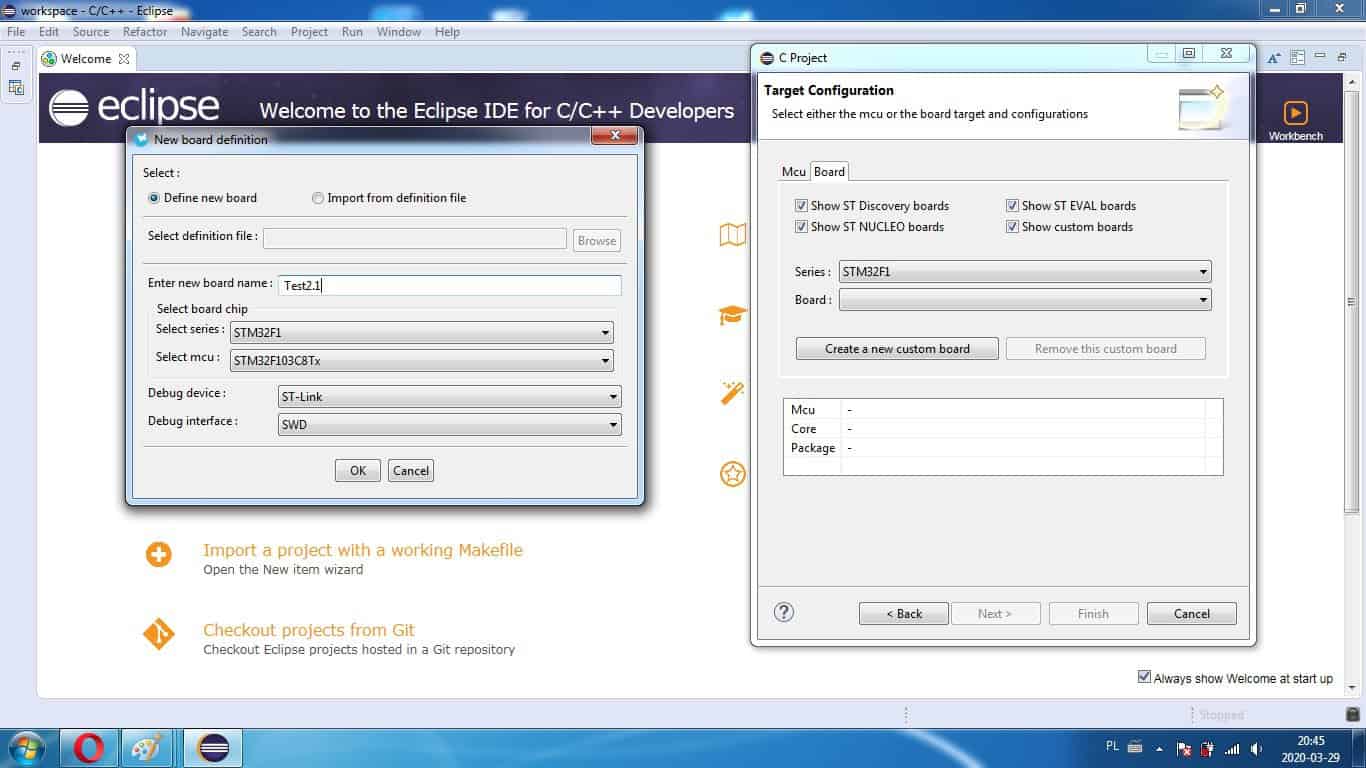
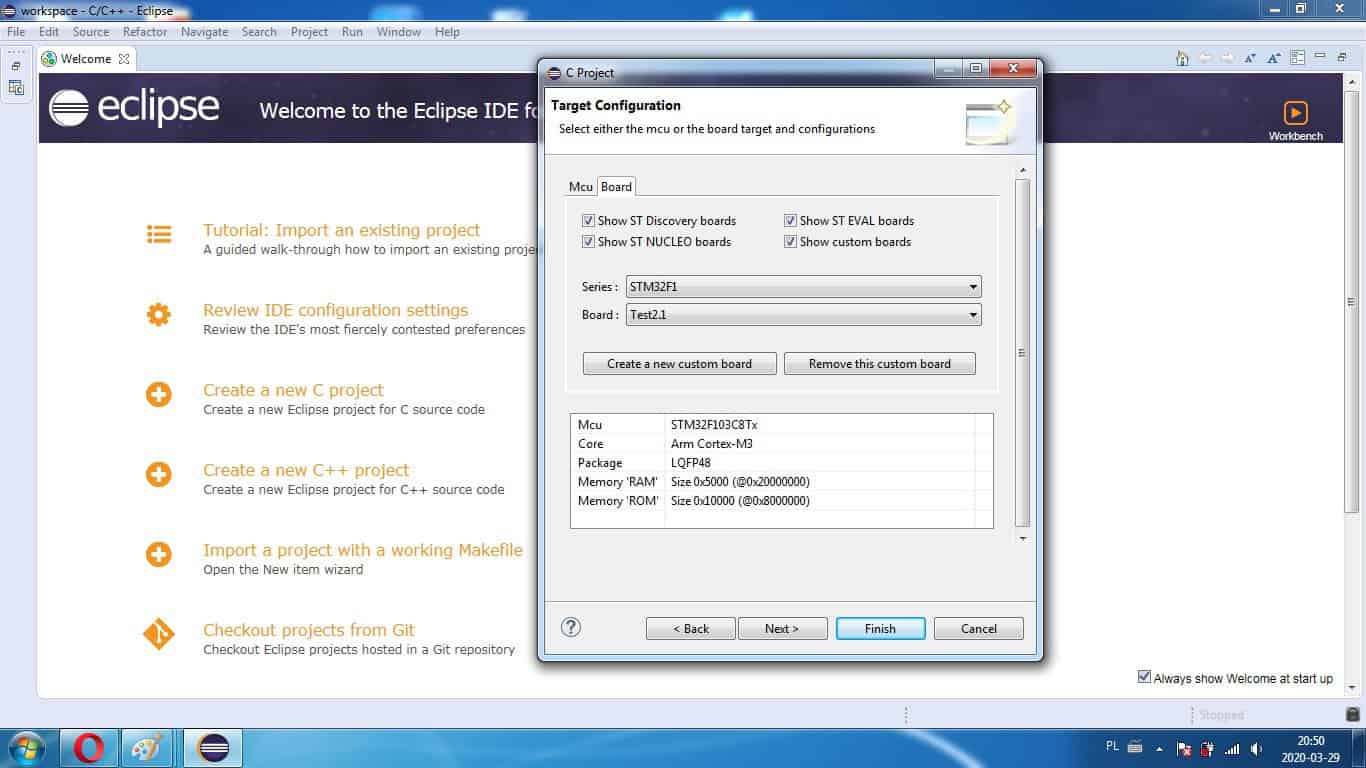
 Na podstawie kursu STM32 chcę uruchomić płytkę STM32F103C8T6, zdjęcie płytki poniżej. Oczywiście nie mogę podczas tworzenia projektu wybrać NUCLEO-F103RB więc poniżej przesyłam zdjęcia z konfiguracji, czy jest ona prawidłowa ? Czy może powinienem wejść w zakładkę MCU a nie Board i tam wybrać procesor ? Przechodząc do biblioteki, zgodnie z opisaną aktualizacją: https://forbot.pl/forum/topic/8387-kurs-stm32-3-plytka-nucleo-konfiguracja-srodowiska/page/10/#comments Dla NUCLEO-F103RB: https://www.st.com/en/embedded-software/stsw-stm32143.html#overview Dla STM32F103C8T6: https://www.st.com/content/st_com/en/products/microcontrollers-microprocessors/stm32-32-bit-arm-cortex-mcus/stm32-mainstream-mcus/stm32f1-series/stm32f103/stm32f103c8.html#tools-software Następnie wybrałem zakładkę Tools & Software, następnie MCU & MPU Embedded Software, następnie najbardziej podobny plik do "based on Standard Peripheral Library" to (proszę kliknąć ctrl+f i wkleić STM32-CLASSB-SPL). Czy to jest odpowiedni plik ?
Na podstawie kursu STM32 chcę uruchomić płytkę STM32F103C8T6, zdjęcie płytki poniżej. Oczywiście nie mogę podczas tworzenia projektu wybrać NUCLEO-F103RB więc poniżej przesyłam zdjęcia z konfiguracji, czy jest ona prawidłowa ? Czy może powinienem wejść w zakładkę MCU a nie Board i tam wybrać procesor ? Przechodząc do biblioteki, zgodnie z opisaną aktualizacją: https://forbot.pl/forum/topic/8387-kurs-stm32-3-plytka-nucleo-konfiguracja-srodowiska/page/10/#comments Dla NUCLEO-F103RB: https://www.st.com/en/embedded-software/stsw-stm32143.html#overview Dla STM32F103C8T6: https://www.st.com/content/st_com/en/products/microcontrollers-microprocessors/stm32-32-bit-arm-cortex-mcus/stm32-mainstream-mcus/stm32f1-series/stm32f103/stm32f103c8.html#tools-software Następnie wybrałem zakładkę Tools & Software, następnie MCU & MPU Embedded Software, następnie najbardziej podobny plik do "based on Standard Peripheral Library" to (proszę kliknąć ctrl+f i wkleić STM32-CLASSB-SPL). Czy to jest odpowiedni plik ?


-
Blue Pillem bawiłem się już wcześniej ale teraz dopiero zainteresował mnie jego czujnik temperatury. Niestety albo moja płytka ( mam tylko jedną taką więc na razie nie sprawdzę na innej) albo jest uszkodzona albo niedorobiona albo (aż wstyd pomyśleć) nie potrafię jej skonfigurować odpowiednio. Wynik pomiaru zmienia się nieznacznie mimo wszelkich zabiegów z mojej strony od chuchania po podgrzewanie zapalniczką przy czym nie ma znaczenia czy dane są pobierane w pętli czy przez DMA.. wynik zmienia się ale w bardzo niewielkim stopniu i zależy chyba bardziej od pływającego napięcia z USB niż temperatury. Nie ma też znaczenia czy idzie przez debuger czy swobodnie, wygląda to tak jak by ten czujnik wogóle nie działał a wartość adc oscyluje w okolicach 1700 kiedy reszta programu zdaje się działać prawidłowo. Mieliście podobne problemy? Być może to jakiś częstszy przypadek i nie warto sobie tym głowy zawracać tylko kupić 2 nucleo zamiast 10 bluepill'ów.. Apropo, jak by ktoś mógł podrzucić poprawną podstawową konfigurację mx do bluepilla i libki z footprintami do KiCada albo inny dedykowany soft 🙂 (znalazłem jakieś niepełnosprawne chyba). Dzięki i pozdro for all.