Przeszukaj forum
Pokazywanie wyników dla tagów 'gąsienicowy'.
Znaleziono 1 wynik
-

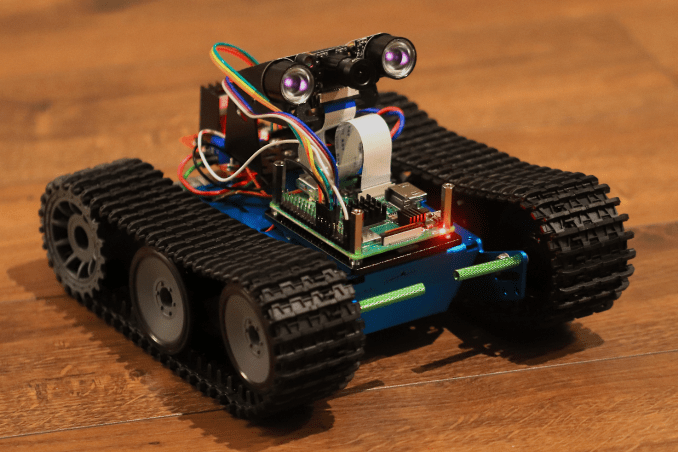
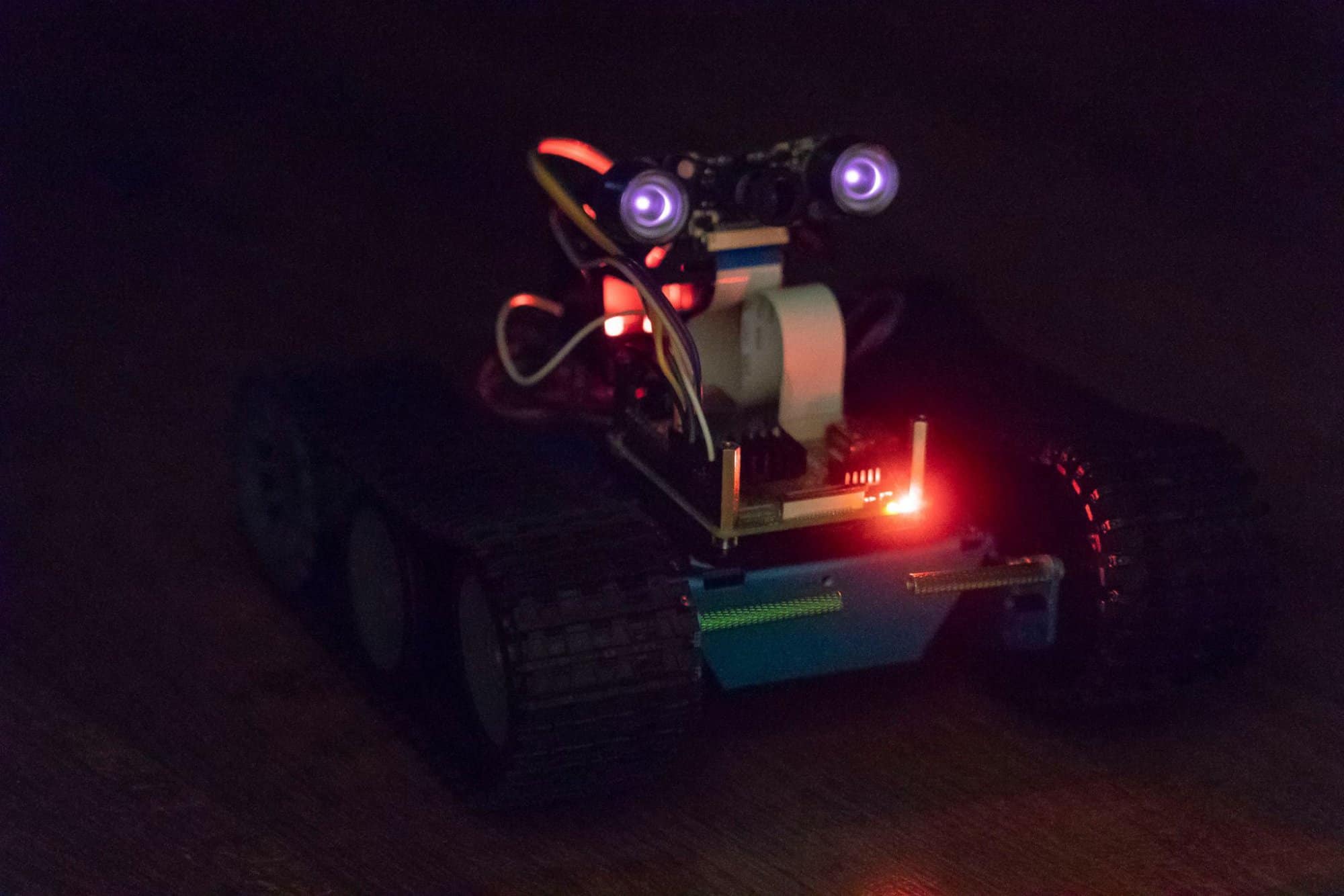
Freestyle Robot gąsienicowy PENETRATOR
Arturo opublikował temat w Projekty - DIY w budowie (worklogi)
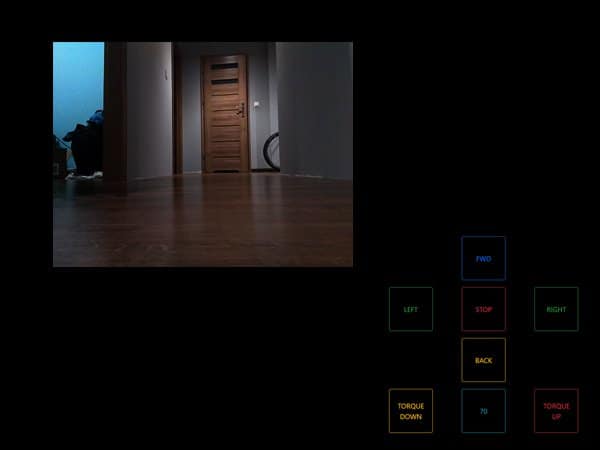
Cześć. Chciałem wam pokazać projekt nad którym pracuję: PENETRATOR Trochę konkretów: aluminiowy kadłub napęd: dwa silniki elektryczne szczotkowe 9V zasilanie 2 x 18650 + 2 x 18650 ukryte pod kadłubem kontroler: Raspberry Pi 3 A+ wizja: moduł kamery 1080p emitery IR umożliwiające kamerze pracę w ciemnościach łączność: WiFi (access point i serwer HTTP) język programowania : Python 3 sterowanie i obraz: autorska aplikacja webowa (w przeglądarce) umożliwiająca wyświetlanie obrazu z kamery i sterowanie robotem W PLANACH: mechaniczne ramię 7DOF oparte na serwomechanizmach MG996R obracanie kamery w 2 płaszczyznach przy pomocy serwomechanizmów mam też ochotę pobawić się sztuczną inteligencją, stąd wybór raspberry a nie np. esp8266 Przy okazji, podziękowania dla Forbot.pl za podstawy które wprowadziły mnie do świata robotyki


- 10 odpowiedzi
-
- 7
-

-
- gąsienicowy
- robot
- (i 2 więcej)