Przeszukaj forum
Pokazywanie wyników dla tagów 'linefollower'.
Znaleziono 4 wyniki
-
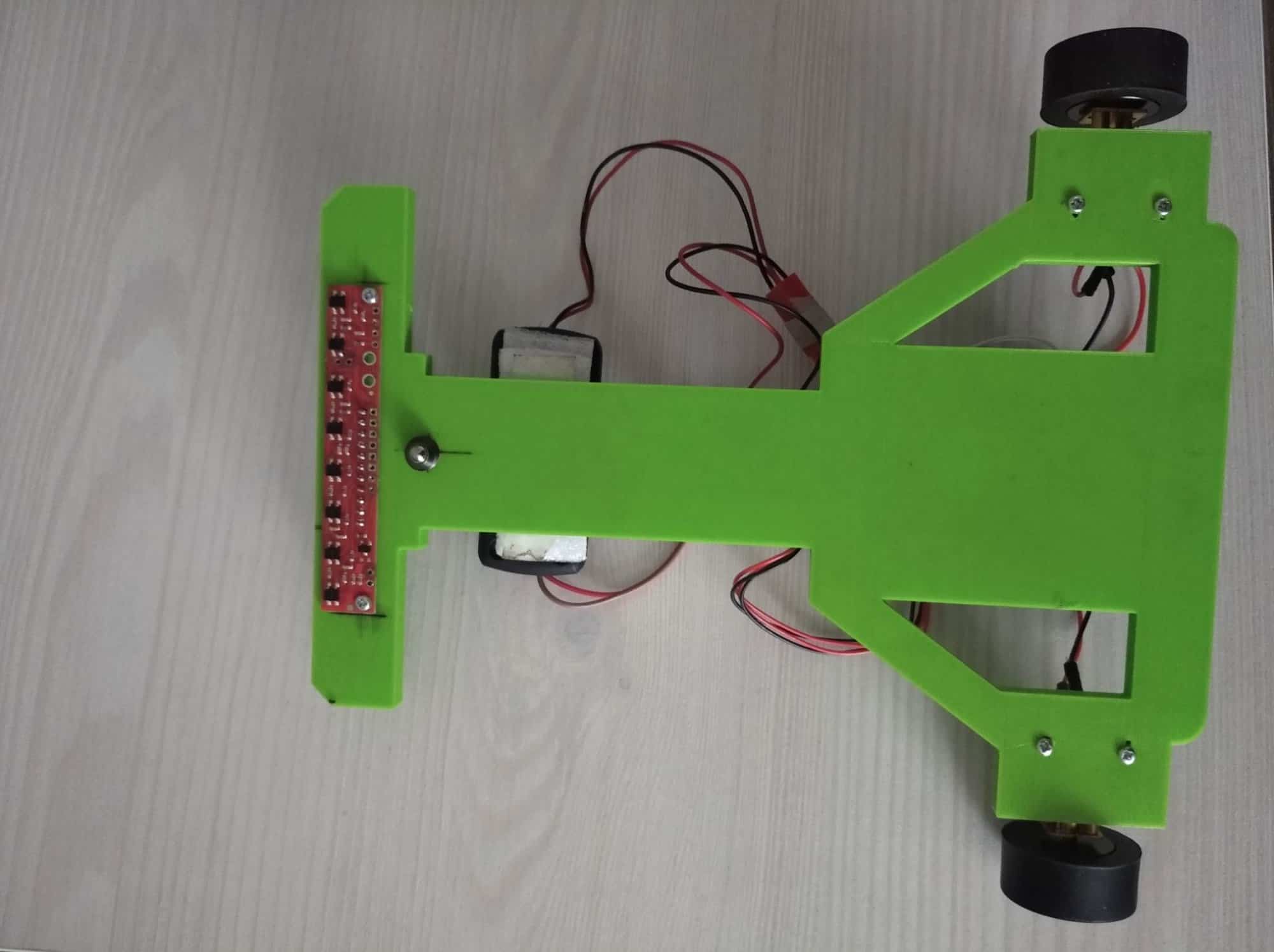
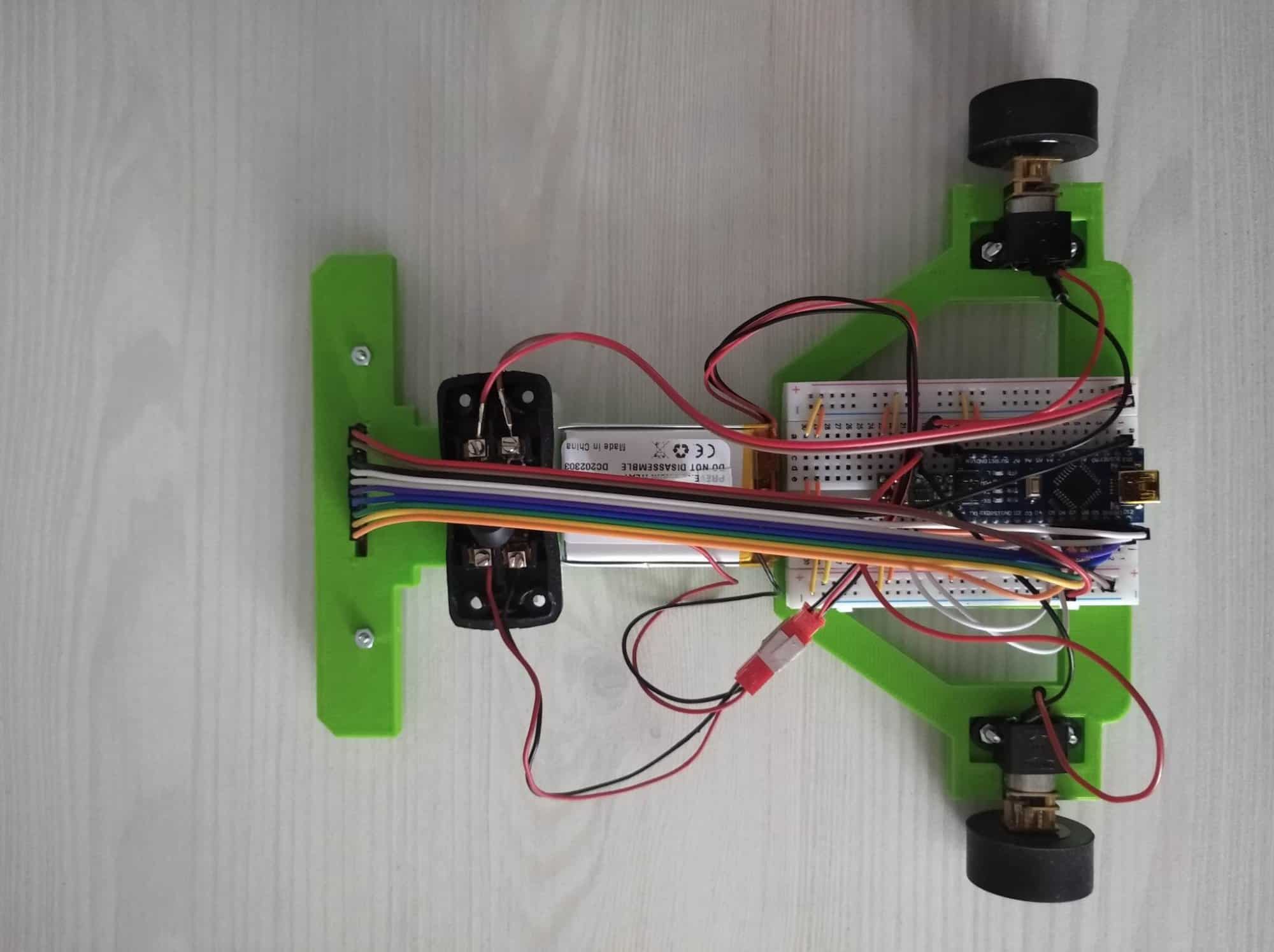
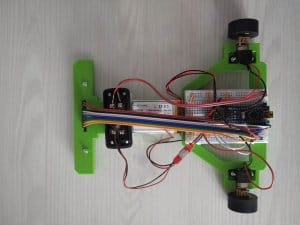
Dzień dobry. Mam problem z silnikami DC w moim linefollowerze - a mianowicie taki, że się psują. Parametry mojego robota to: - masa: 207 g - wymiary: długość 200 mm, szerokość od koła do koła 187 mm - zasilanie: 2 x Li - Po (w pełni naładowane łącznie 8,4 V) https://botland.com.pl/akumulatory-li-pol-1s-37v/15618-akumulator-li-pol-akyga-1100mah-1s-37v-zlacze-jst-bec-gniazdo-55x32x62mm-5904422343613.html - sterownik silników: DRV8835 (ciągły prąd 1.2 A, chwilowy 1.5 A, zakres napięć 2 - 11 V) https://botland.com.pl/sterowniki-silnikow-dc/851-drv8835-dwukanalowy-sterownik-silnikow-11v12a-pololu-2135-5904422367220.html Zdjęcia robota: Jak widać, robot ma dwa tylnie koła, a z przodu "ślizga" się na tej małej kulce (ona się nie obraca jak ball caster, robot się po prostu ślizga) Dotychczas robot był napędzany tymi silnikami: https://botland.com.pl/silniki-micro-n20-seria-mp-medium-power/12555-silnik-n20-bt16-micro-101-2000rpm-9v-5904422306564.html Maksymalne napięcie zasilania to 8.4 V, a realne napięcie wystawiane przez sterownik silników przy największej prędkości to 6.8 V (mierzone multimetrem). Niestety mimo że te napięcia zawierają się w zakresie napięć tego modelu silnika (3 - 9 V) to silnik się psuje - wał silnika bardzo ciężko obrócić i nie chce startować. Dlatego proszę o pomoc w dobraniu odpowiednich parametrów silnika DC do mojego robota, lub (jeszcze lepiej) konkretnego modelu silnika. Najlepiej jakby miał takie same wymiary co dotychczas, żebym nie musiał zmieniać podwozia robota. Jeśli pominąłem coś ważnego to odpowiem na dalsze pytania, z góry dziękuję za wszelką pomoc.

-
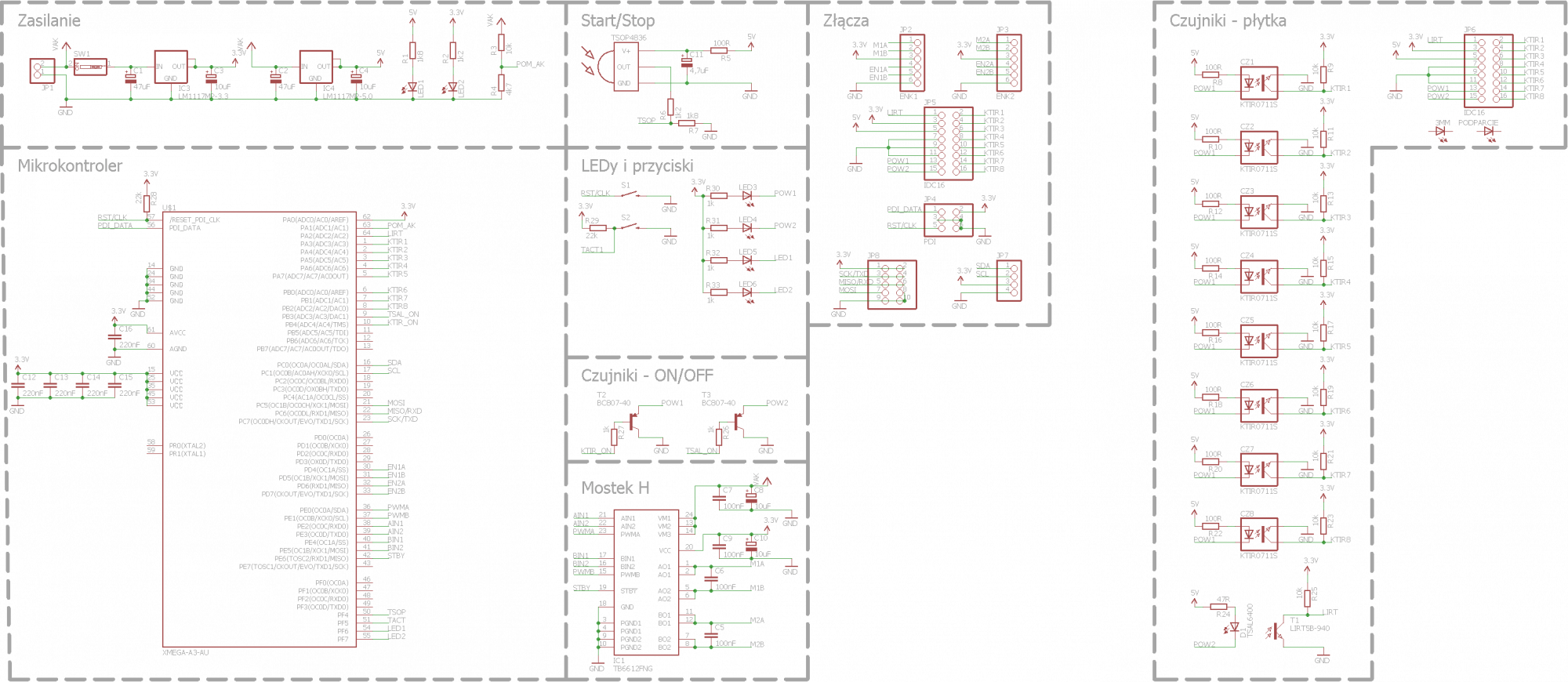
Hej, jeśli komuś chciałoby się rzucić okiem na schemat mojego LF'a i sprawdzić czy wszystko jest jak należy, to bardzo proszę: Będę wdzięczny za wszelkie uwagi. Przede wszystkim chciałbym się upewnić, czy sterownie diodami IR jest na pewno ok. Pozdrawiam!

-
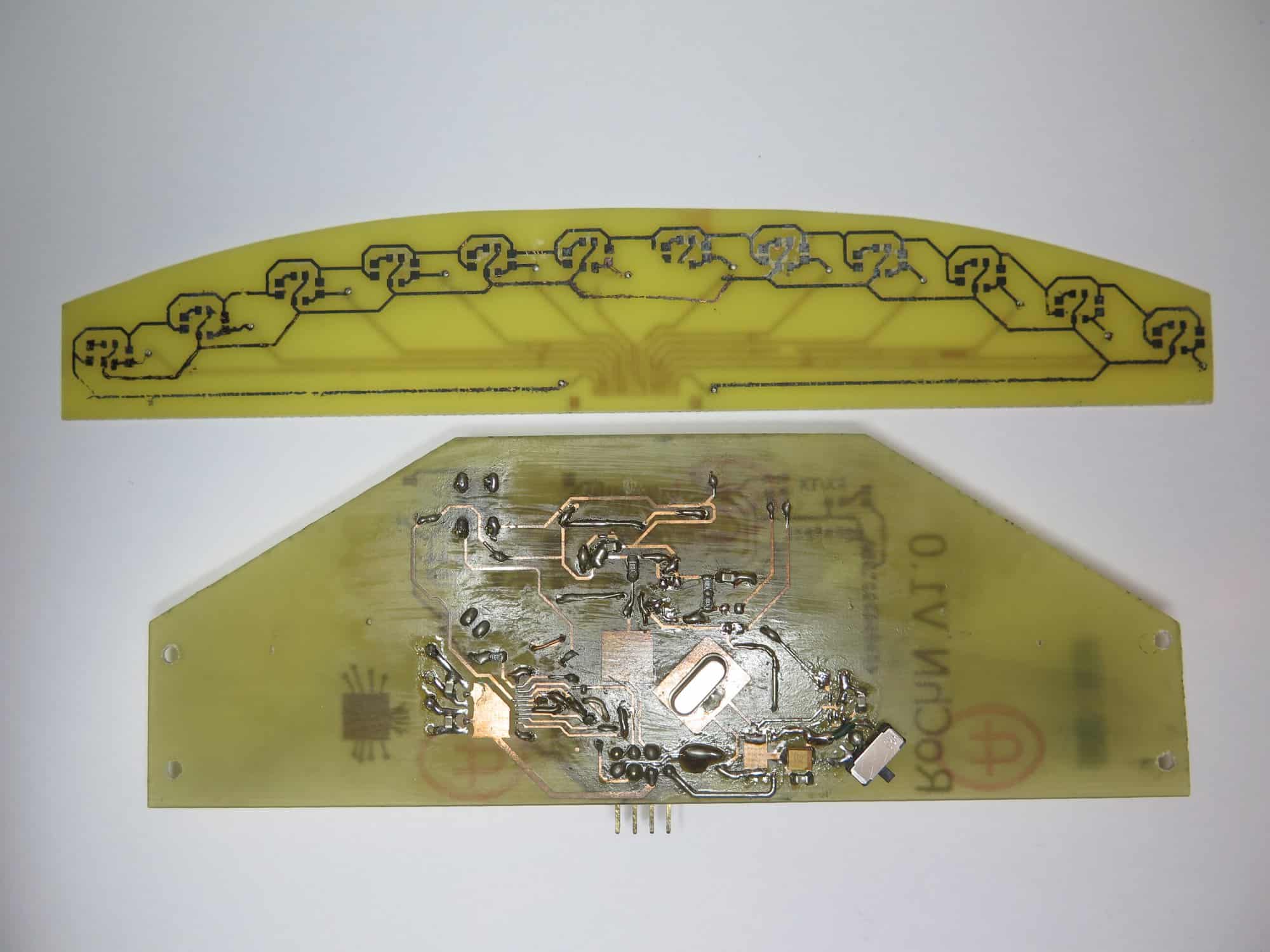
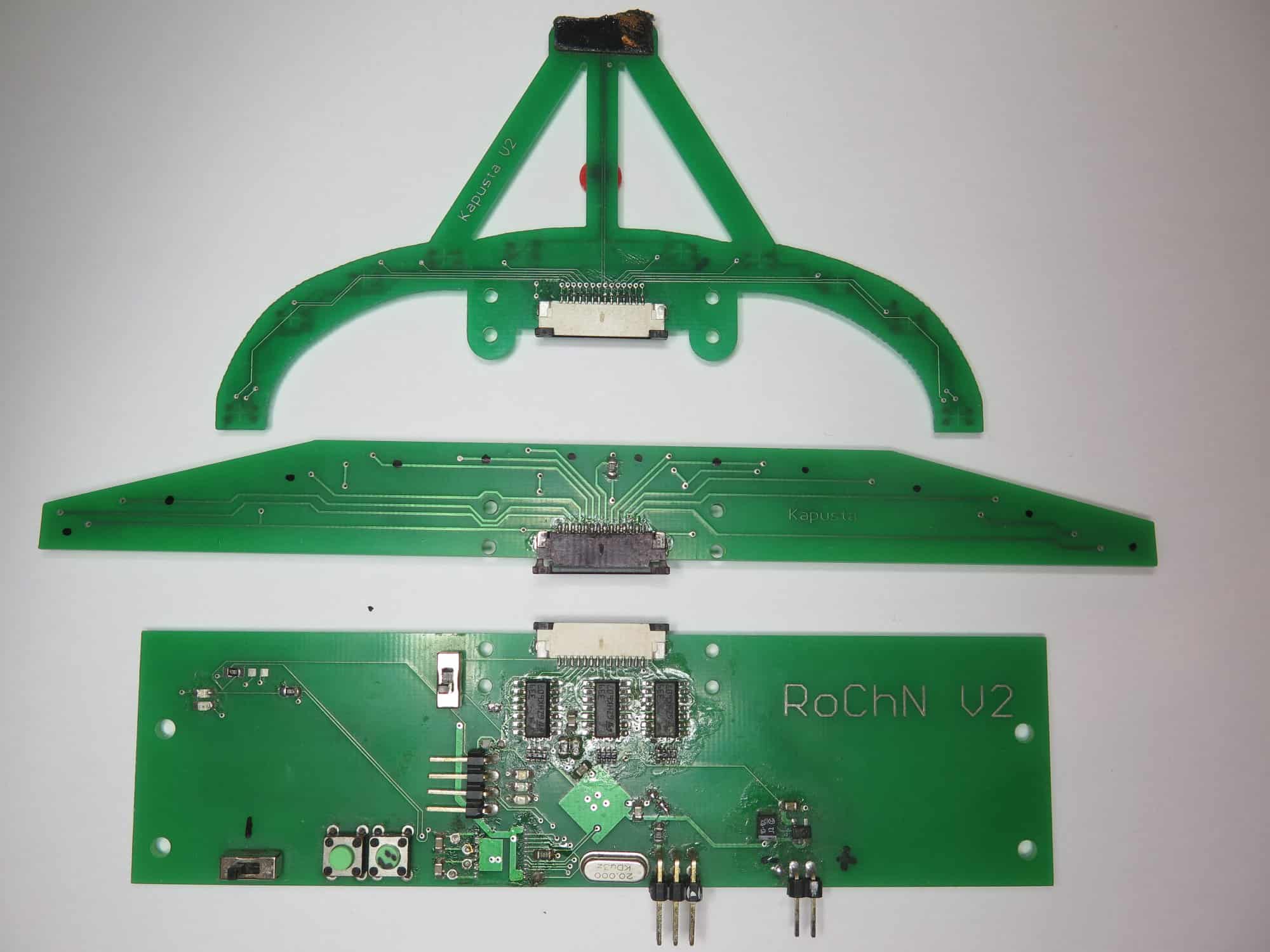
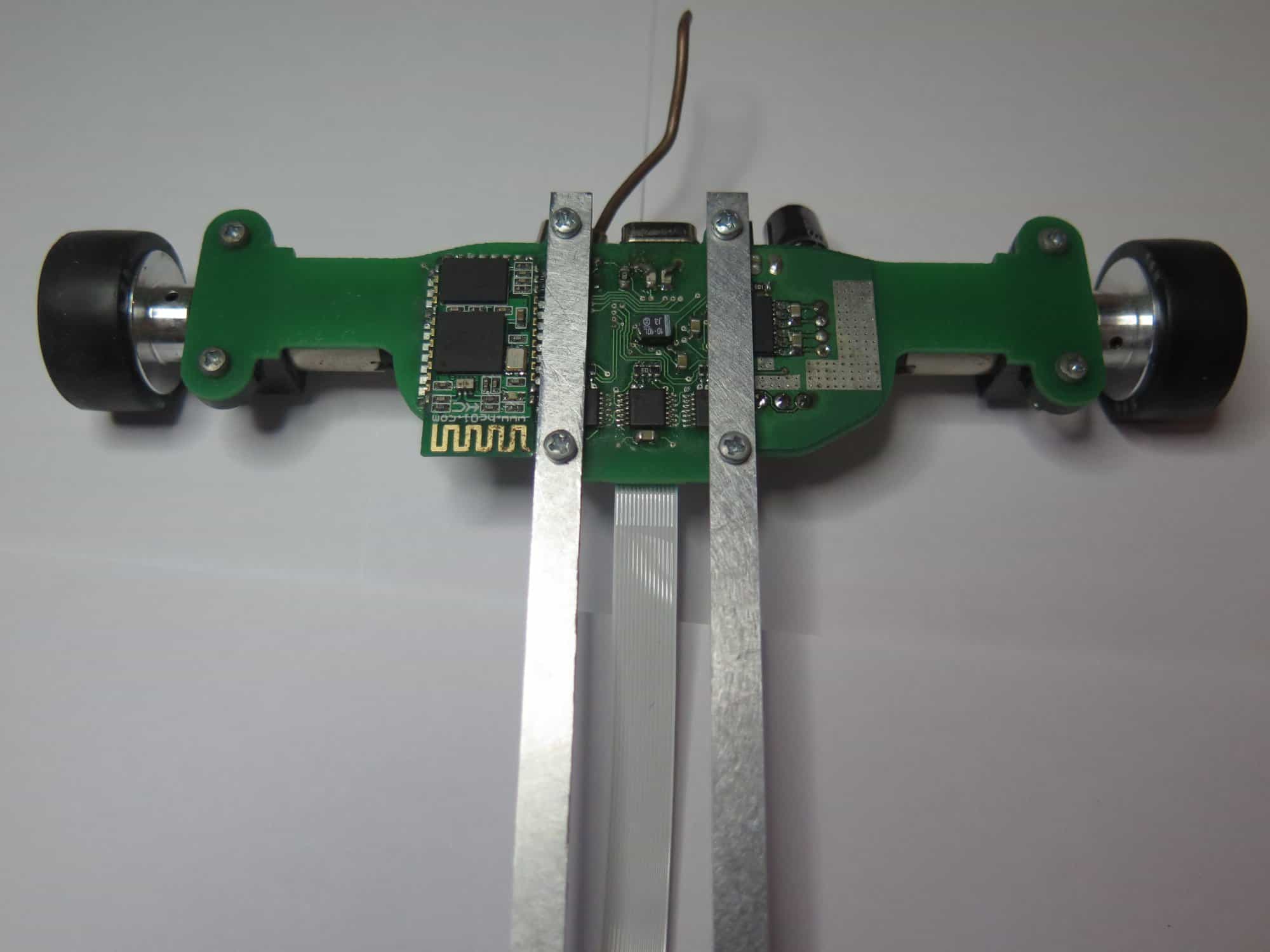
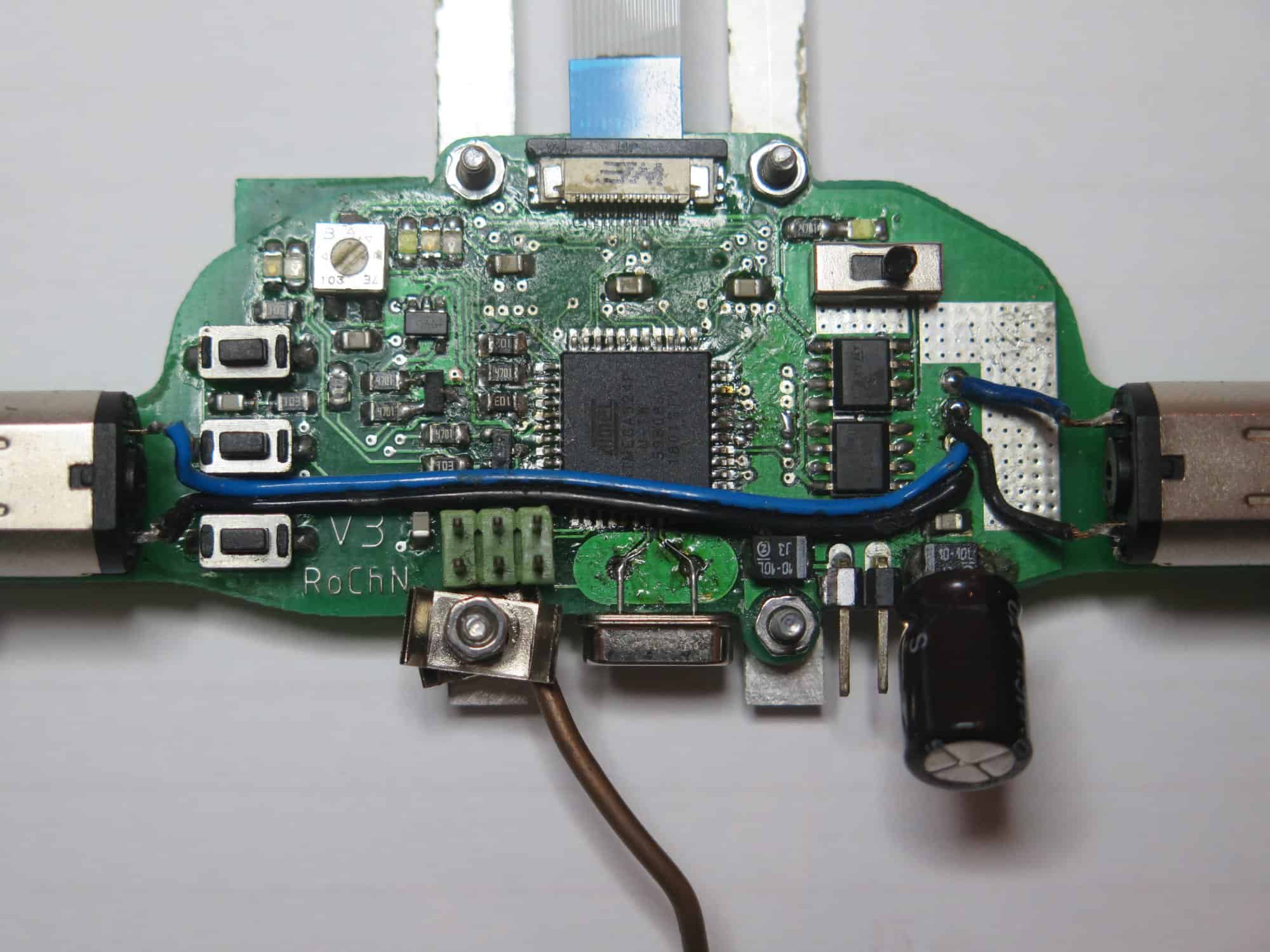
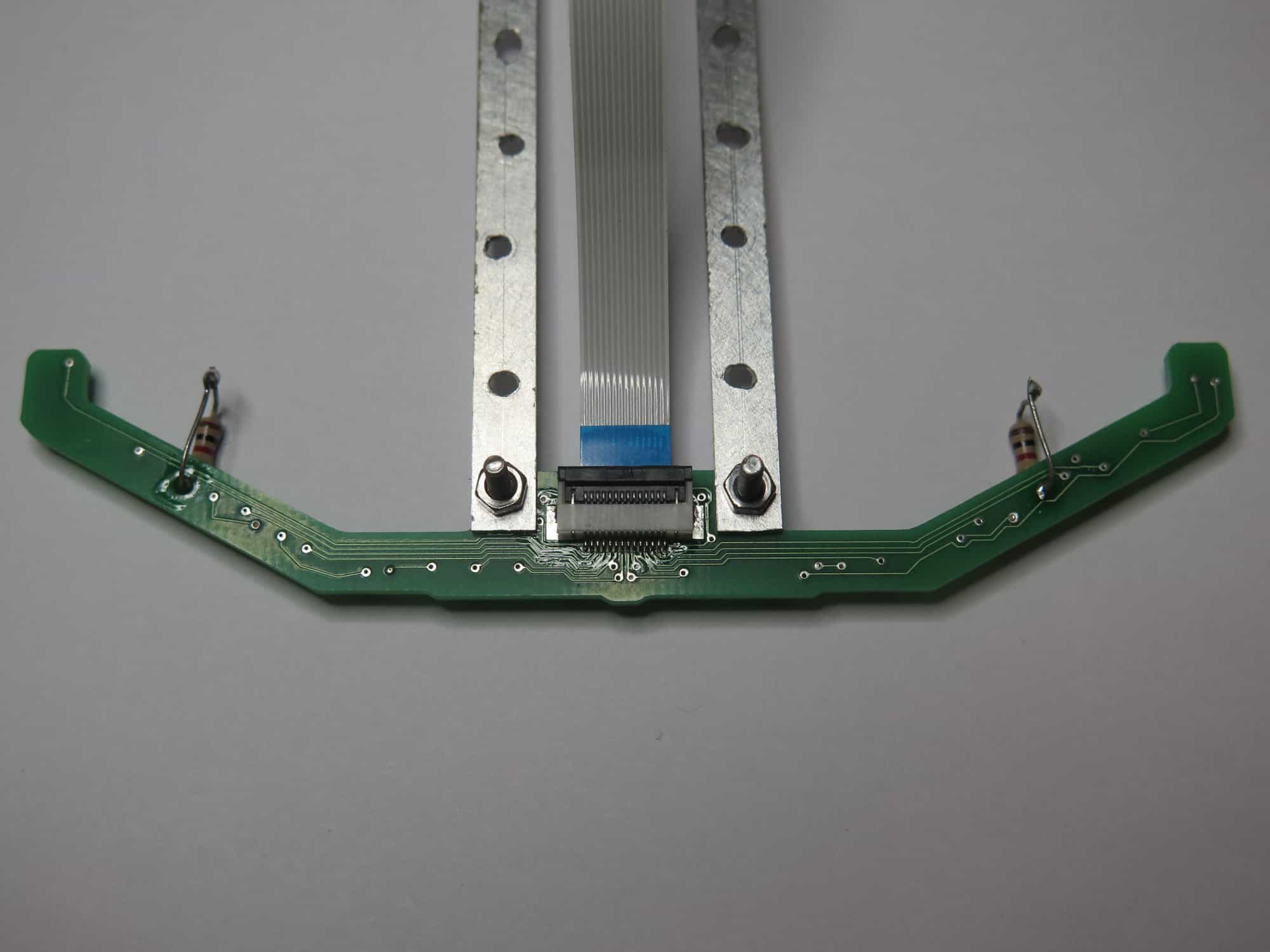
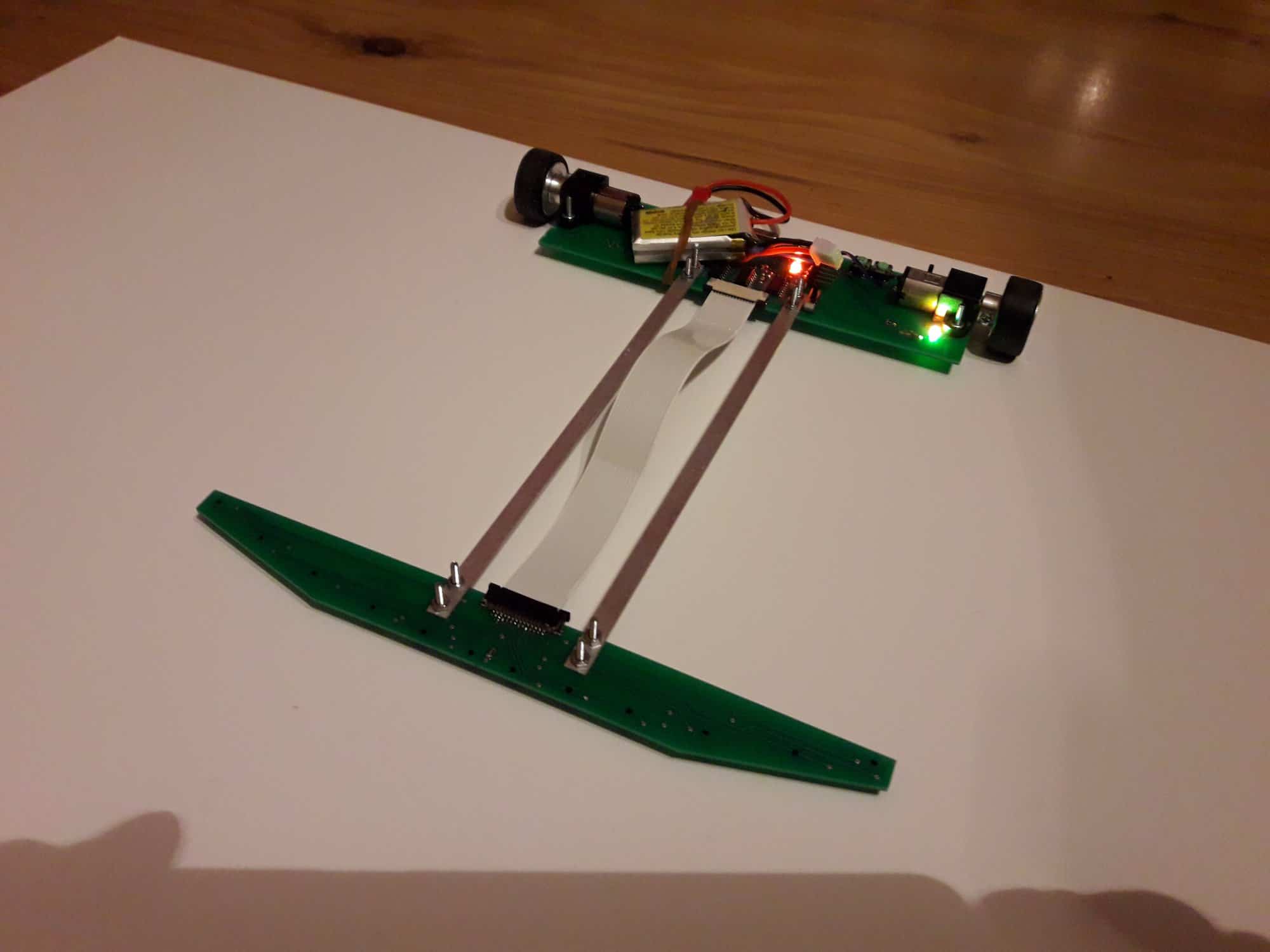
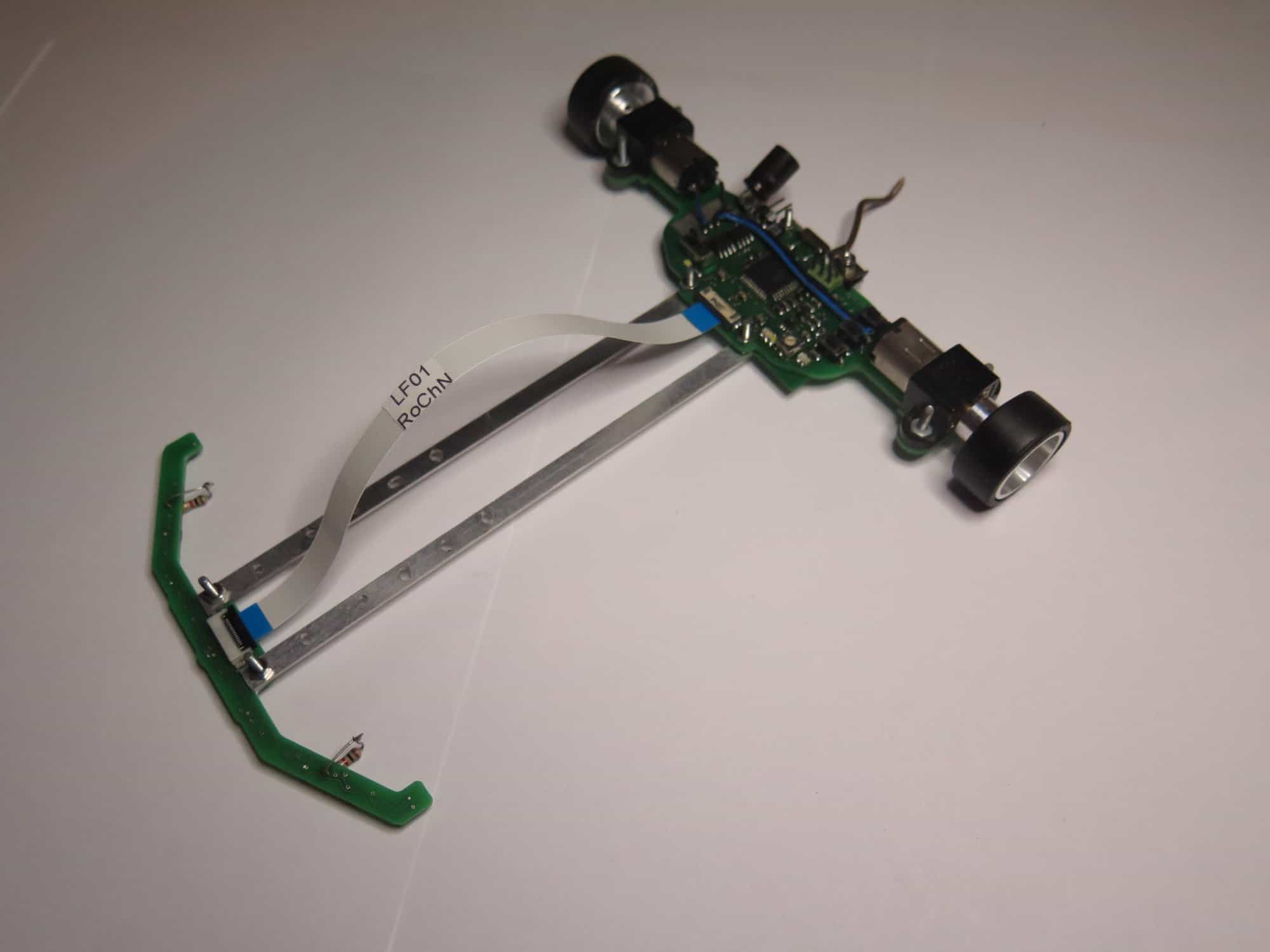
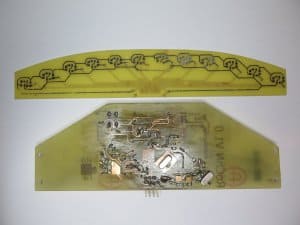
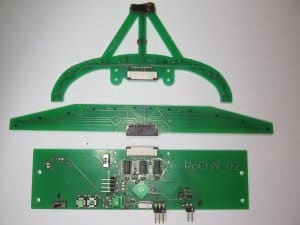
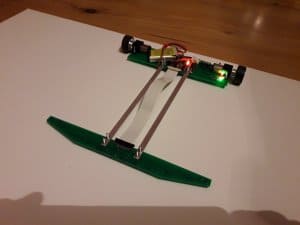
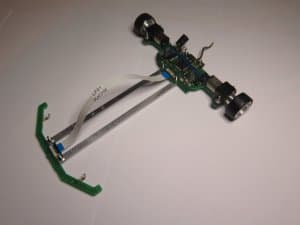
Nazwa RoChN - Robot o Chwytliwej Nazwie obejmuje trzy wersje robota (V1 - V3), które zbudowaliśmy z kolegą paor na początku w ramach eksperymentu, a następnie już jako pełnoprawna szkolna drużyna robotyczna KRÓL. Jest to jedna z ostatnich tego typu (procesor, brak enkoderów) konstrukcji na dużych zawodach w Polsce. Pomimo tego osiąga całkiem przyzwoite wyniki, zdarzyło mu się też powalczyć o podium, którego jednak nigdy nie zdobył. Opiszę po kolei wszystkie wersje, ponieważ nie różnią się na tyle, aby można było je uznać za osobne konstrukcje. Elektronika: Zastosowaliśmy mikrokontroler ATmega324 taktowany 16MHz kwarcem, 12 czujników linii KTIR0711s podłączone do trzech poczwórnych komparatorów LM339 i mostek H - TB6612FNG. Do komunikacji wykorzystaliśmy HC-05. Sekcja zasilania od wersji trzeciej składa się z dwóch stabilizatorów na 5V - osobnych dla czujników i logiki. Silniki są zasilane bezpośrednio z akumulatora 2s. Z akumulatorem 150mAh waży około 70g. Mechanika: Zastosowane silniki to Pololu HP 10:1. Sprawdziły się dobrze, chociaż za względu na dość znaczny przebieg szczotki są mocno zużyte. Robot składa się z dwóch dwustronnych płytek drukowanych połączonych aluminiowymi listewkami i taśmą ffc. Z tyłu znajduje się dodatkowa podpórka wykonana z kawałka drutu, która zapobiega odwracaniu się robota przy starcie z dużą prędkością. Przednia płytka posiada ślizgacze wykonane z rezystorów THT - sprawują się lepiej, niż stosowane do tego przedtem LEDy. Oprogramowanie: Program do robota został napisany w języku C. Realizuje on regulator PD, z którym było sporo problemów ze względu na brak wiedzy teoretycznej oraz doświadczenia w strojeniu. Powstał też program na komputer ułatwiający komunikację z robotem poprzez bluetooth i umożliwiający zmiany w konfiguracji, ręczne sterowanie i trochę innych "bajerów". Krótki opis zmian w kolejnych wersjach: -V1 Pierwsze podejście do zbudowania linefollowera na zawody. Wykonana domowymi metodami płytka okazała się być bardzo wadliwa i ostatecznie robot ten nigdy nie ruszył z miejsca - przód nie został nawet wyczyszczony z tonera. Większość elementów z płytki głównej została później wylutowana. Wyciągnęliśmy z tej porażki wiele wniosków, w końcu człowiek najlepiej uczy się na błędach. -V2 W przeciwieństwie do poprzednika robot posiada płytkę drukowaną wykonaną na zamówienie. Problemy spowodowały części projektu, które nie zostały przetestowanie przy okazji wersji pierwszej - stabilizator napięcia przegrzewał się i trzeba było dodać mu radiator w postaci kawałka drutu. Już na zawodach okazało się, że robot jest za szeroki, w wyniku czego miewał problemy z ciasnymi zakrętami. Pojawiły się też kłopoty z modułem bluetooth - legendarnym HC-05, który po jakimś czasie odmówił współpracy i trzeba było go wymienić. W międzyczasie zmieniliśmy też kształt przedniej płytki, jak się później okazało z kiepskiego na jeszcze gorszy. Wyciągnęliśmy z tej konstrukcji dużo wniosków, które wpłynęły na wersję trzecią. Na zdjęciach widać, że część elementów została wylutowana do ponownego użycia. -V3 Prawdopodobnie ostatnia wersja z tej serii, praktycznie pozbawiona błędów projektowych. Węższa i lżejsza. Oddzieliliśmy zasilanie czujników linii od reszty, a do połączenie przedniej płytki z tylną zastosowaliśmy taśmę o rasterze 0.5 mm. Również ta konstrukcja miała kilka przodów w ramach eksperymentów z ułożeniem czujników. Przez jakiś czas używaliśmy opon odlewanych z silikonu, jednak okazały się mniej przyczepne niż mini-z - może to kwestia braku doświadczenia w doborze proporcji. Podczas początkowych testów udało nam się dwa razy spalić mikrokontroler i zepsuć rezonator kwarcowy, który niezbyt umiejętnie wymieniłem - wydać to na zdjęciach. Osiągnięcia: 6. miejsce Robotic Arena 2019 4. miejsce Robomaicon 2019 Zdjęcia i filmy z zawodów: Wersja 2 na starcie lf drag na BBR 2018




-
Witam wszystkich. Mamy w szkole kilka zestawów Lego Mindstorms EV3, z którymi byliśmy już na kilku zawodach w kategoriach sumo i linefollower. Moją uwagę zwróciły jednak roboty starszej generacji Lego RCX, które w konkurencji linefollower biją nowsze wersje czyli np. EV3 na głowę. I tu moje pytanie, czy ktoś mógłby wyjaśnić z czego to wynika ten fenomen, że starsze generacje są lepsze od nowszych? Zacząłem się zastanawiać, czy nie kupić z jednego, czy dwóch zestawów RCX, ale wolałbym najpierw wiedzieć w czym tkwi sekret?