Przeszukaj forum
Pokazywanie wyników dla tagów 'sterowanie'.
Znaleziono 14 wyników
-
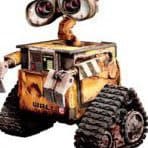
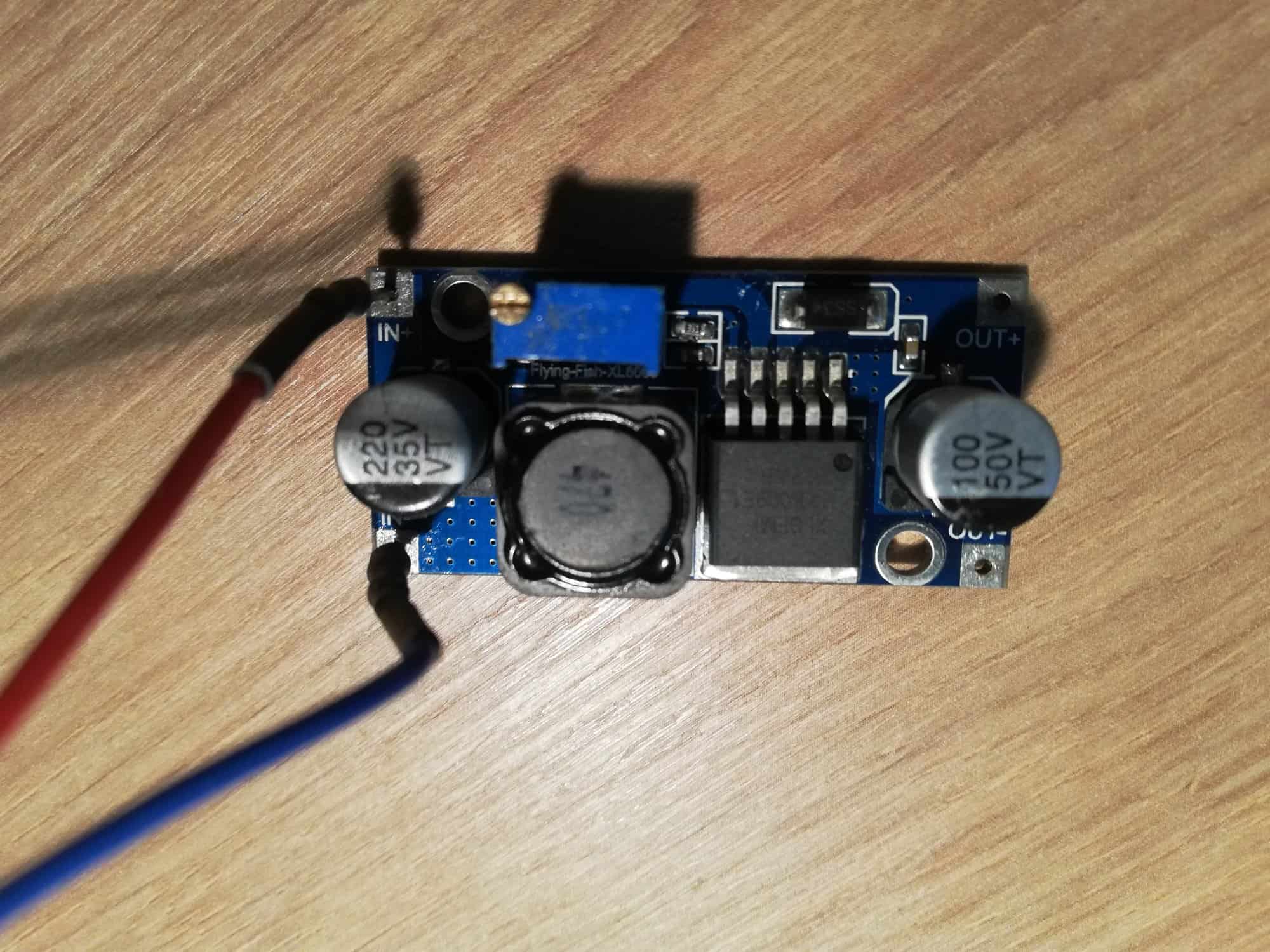
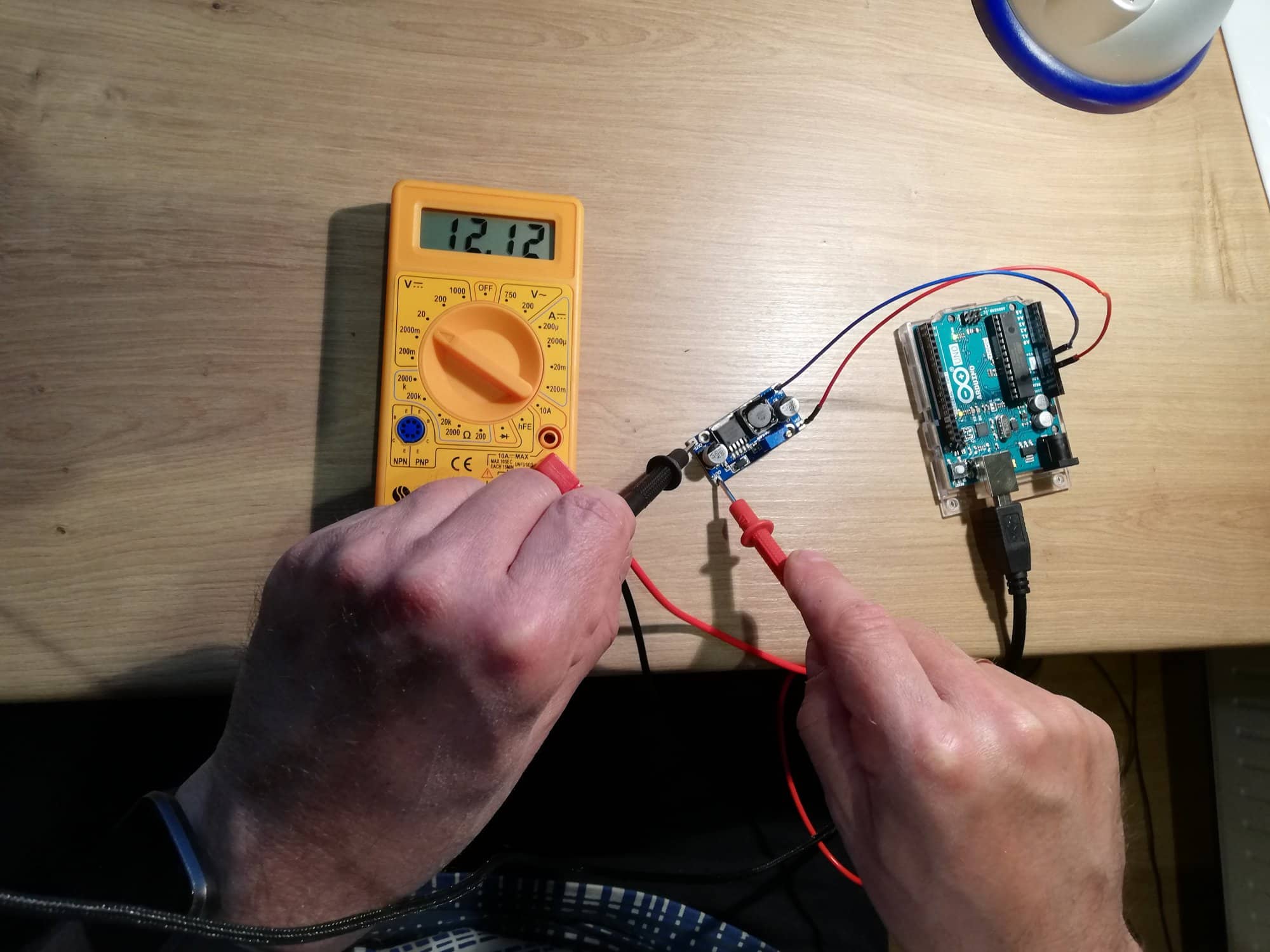
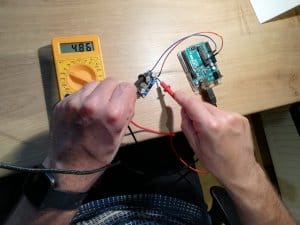
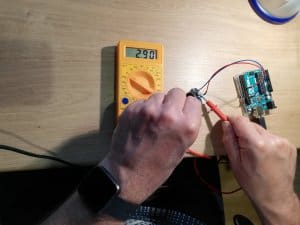
Witam serdecznie. Kupiłem do testów zawór elektromagnetyczny 12V - 3/4'' - SparkFun ROB-10456 ze sklepu Botland. Do wzmocnienia napięcia użyłem przetwornicę step-up XL6009 regulowaną 4V-35V 3A . I tak, jeśli wepnę przewody do pinów 5V i GND, napięcie wyjściowe jest ok. 4.86V i takie dochodzi do przetwornicy . Zostaje wzmocnione do ok 12V, chociaż zawór działa prawidłowo już przy niecałych 9V i wszystko jest OK. Ustawiam stan wysoki na pinie 8 i napięcie wyjściowe jest 4.88V. Na wejściu przetwornicy jest już tylko 2.90V (???) a na wyjściu aż 17.69V, czasami wartość mniejsza niż na wejściu np. wejście 2.60V, wyjście 2.30V i regulacja potencjometrem nic nie daje. Jednak po zmniejszeniu napięcia wyjściowego elektrozawór nie działa. Przy tym wysokim napięciu słychać ciche puknięcie w cewce, jednak po zmniejszeniu napięcia do wartości rzędu 8-12V, zawór nie podnosi się. Po ponownym podłączeniu do pinu 5V i wyregulowaniu napięcia na przetwornicy, znów wszystko działa poprawnie. Dlaczego???? Chcę programować otwarcie i zamknięcie elektrozaworu (docelowo trzech), jednak tą metodą nie działa. Proszę o pomoc, w co należy wyposażyć układ, aby było możliwe zasilenie elektrozaworu z pinów cyfrowych? Dodam, że wszystko ma być zasilane z Arduino jednym zasilaczem 7V 1A.




-
W moim autku na BT koła miały problem z rozkręcaniem się najprawdopodobniej przez niecałkowite otwarcie się MOSFET-u, gdyż silniczki w aucie są na max. 6 v a układ sterujący na 12 v (jak mi zasugerował stary gracz w tym temacie) i powiedział też, żebym zastosował logikę ujemną, lub sterowanie masą jak kto woli, no i zabieram się do tego i tu jest problem, bo jak na pojedynczych komponentach wiem co robić, tak tutaj nie wiem, od czego zacząć, a nie chciałbym sobie usmażyć czegoś, także co zrobić? Będę wdzięczny za każdą sugestię i odpowiedź
-
Witam, pracuję nad stworzeniem autonomicznego pojazdu, bazującego na Raspberry Pi i Pythonie. Do sterowania silnikami wykorzystuję układ DRV8835 od Pololu (dedykowany układ do RPi), ma on nawet stworzoną własną bibliotekę do obsługi. Testowałem jego działanie na przykładowym programie dostarczonym wraz z biblioteką i działa, tylko nie mogę znaleźć nigdzie jakiegoś projektu, informacji jak przełożyć to na jakieś konkretne zastosowanie. Poniżej wstawiam kod który był dostarczony z biblioteką. from __future__ import print_function import time from pololu_drv8835_rpi import motors, MAX_SPEED # Set up sequences of motor speeds. test_forward_speeds = list(range(0, MAX_SPEED, 1)) + \ [MAX_SPEED] * 200 + list(range(MAX_SPEED, 0, -1)) + [0] test_reverse_speeds = list(range(0, -MAX_SPEED, -1)) + \ [-MAX_SPEED] * 200 + list(range(-MAX_SPEED, 0, 1)) + [0] try: motors.setSpeeds(0, 0) print("Motor 1 forward") for s in test_forward_speeds: motors.motor1.setSpeed(s) time.sleep(0.005) print("Motor 1 reverse") for s in test_reverse_speeds: motors.motor1.setSpeed(s) time.sleep(0.005) print("Motor 2 forward") for s in test_forward_speeds: motors.motor2.setSpeed(s) time.sleep(0.005) print("Motor 2 reverse") for s in test_reverse_speeds: motors.motor2.setSpeed(s) time.sleep(0.005) finally: # Stop the motors, even if there is an exception # or the user presses Ctrl+C to kill the process. motors.setSpeeds(0, 0) W moim przypadku mam do pobrania z drugiego pliku wartości "angle" i "distance", muszę wprowadzić dodatkowo dwie stałe "dis=.75" oraz "ang=1" . Z tego wszystkiego muszę wyprowadzić sterowanie silników aby działały według równania które jest zamieszczone poniżej. Mógłby mi ktoś pomóc, poradzić, powiedzieć, naprowadzić mnie jak to zdefiniować na mim konkretnym przykładzie? from plik1 import angle, distance dis=.75 ang=1 rownanie=((distance*dis)+(angle*ang))
-

Robot balansujący - Sterownik silników
MR1979 opublikował temat w Projekty - DIY w budowie (worklogi)
Witam! Rozpoczynam nowy projekt, którym będzie próba zbudowania robota balansującego. Będzie to mój pierwszy robot. Ponieważ temat jest obszerny, oraz sama elektronika robota będzie modułowa, więc postanowiłem podzielić projekt na kilka worklogów. Zaczynam od modułu sterowania silników i tego będzie dotyczyć ten worklog. Założenia: 1. Dwa kanały (2 silniki BLDC - do gimbali) 2. Sterowanie FOC z enkoderem magnetycznym 3. Zintegrowany mikrokontroler który będzie tylko do sterowania silnikami (utrzymywanie równowagi i zadanych parametrów ruchu) 4. Zintegrowany akcelerometr i żyroskop 5. Monitorowanie max prądu silników (zabezpieczenie przed przeciążeniem) Zdecydowałem się na następujące główne komponenty: 1. Silniki BLDC do gimbali - 5208 - 2 szt. 2. Driver silników L6234 - 2 szt. 3. Enkodery magnetyczne AS5600 - 2 szt. 4. Akcelerometr i żyroskop - MPU6050 - 1 szt. 5. Mikrokontroler STM32F103RG (wersja XL-density bo ma dwa zaawansowane timery TIM1 i TIM8) Pozdrawiam, Marek -
Witajcie Uczę i poznaję możliwości Arduino. Wpadłem na pomysł zbudowania ruchomych tarcz strzelniczych dla synka z użyciem pistoletów na piankowe naboje. Sterowanie za pomocą Arduino + przekażniki + elektrozawory pneumatyczne + siłowniki. Stworzyłem jak narazie kod gdzie na każdy kanał podaję parametry czasu opóźnienia i czasu trwania załączenia. Uruchamianie następuje po wciśnięciu przycisku na kablu. Akcja zaczyna z odliczaniem np po 5 sekundach (z regulacja od 0 do 30 sekund w kodzie) po wciśnieciu przycisku. Potrzebuję dopisać kod z udziałem diody LED mrugający co sekundę odliczanie i zaraz przed rozpoczęciem akcji pali sie np na 3 sekundy. Niestety programowanie jak dla mnie czarna magia i dlatego zwracam o pomoc. Dziękuje Oto kod: //opoznienie i czas trwania w ms dla kanału 1 unsigned long opoznienie1 = 1500; unsigned long czas1 = 50; //opoznienie i czas trwania w ms dla kanału 2 unsigned long opoznienie2 = 2000; unsigned long czas2 = 100; //opoznienie i czas trwania w ms dla kanału 3 unsigned long opoznienie3 = 1500; unsigned long czas3 = 150; //opoznienie i czas trwania w ms dla kanału 4 unsigned long opoznienie4 = 3000; unsigned long czas4 = 200; //opoznienie i czas trwania w ms dla kanału 5 unsigned long opoznienie5 = 3500; unsigned long czas5 = 250; //opoznienie i czas trwania w ms dla kanału 6 unsigned long opoznienie6 = 4000; unsigned long czas6 = 300; //opoznienie i czas trwania w ms dla kanału 7 unsigned long opoznienie7 = 4500; unsigned long czas7 = 350; //opoznienie i czas trwania w ms dla kanału 8 unsigned long opoznienie8 = 5000; unsigned long czas8 = 400; // cyfrowy, pod który podłączony jest przycisk START const int buttonPin = 2; int buttonState = 0; unsigned long int last_millis; void setup() { //tutaj wpisujemy instrukcje pinMode dla wszystkich kanałów pinMode(12, OUTPUT); pinMode(11, OUTPUT); pinMode(10, OUTPUT); pinMode(9, OUTPUT); pinMode(8, OUTPUT); pinMode(7, OUTPUT); pinMode(6, OUTPUT); pinMode(5, OUTPUT); pinMode(buttonPin, INPUT); //itd. } void loop() { buttonState = digitalRead(buttonPin); if (buttonState == HIGH) { delay(5000); last_millis = millis(); } //KANAL 1 if( millis() >= (last_millis + opoznienie1 + czas1)) { //tutaj wyłączamy urządzenia kanału 1 digitalWrite(12, HIGH); } else if( millis() >= (last_millis + opoznienie1)) { //tutaj uruchamiamy urządzenia dla kanału 1 digitalWrite(12, LOW); } //KANAL 2 if( millis() >= (last_millis + opoznienie2 + czas2)) { //tutaj wyłączamy urządzenia kanału 2 digitalWrite(11, HIGH); } else if( millis() >= (last_millis + opoznienie2)) { //tutaj uruchamiamy urządzenia dla kanału 2 digitalWrite(11, LOW); } //KANAL 3 if( millis() >= (last_millis + opoznienie3 + czas3)) { //tutaj wyłączamy urządzenia kanału 3 digitalWrite(10, HIGH); } else if( millis() >= (last_millis + opoznienie3)) { //tutaj uruchamiamy urządzenia dla kanału 3 digitalWrite(10, LOW); } //KANAL 4 if( millis() >= (last_millis + opoznienie4 + czas4)) { //tutaj wyłączamy urządzenia kanału 4 digitalWrite(9, HIGH); } else if( millis() >= (last_millis + opoznienie4)) { //tutaj uruchamiamy urządzenia dla kanału 4 digitalWrite(9, LOW); } //KANAL 5 if( millis() >= (last_millis + opoznienie5 + czas5)) { //tutaj wyłączamy urządzenia kanału 5 digitalWrite(8, HIGH); } else if( millis() >= (last_millis + opoznienie5)) { //tutaj uruchamiamy urządzenia dla kanału 5 digitalWrite(8, LOW); } //KANAL 6 if( millis() >= (last_millis + opoznienie6 + czas6)) { //tutaj wyłączamy urządzenia kanału 6 digitalWrite(7, HIGH); } else if( millis() >= (last_millis + opoznienie6)) { //tutaj uruchamiamy urządzenia dla kanału 6 digitalWrite(7, LOW); } //KANAL 7 if( millis() >= (last_millis + opoznienie7 + czas7)) { //tutaj wyłączamy urządzenia kanału 7 digitalWrite(6, HIGH); } else if( millis() >= (last_millis + opoznienie7)) { //tutaj uruchamiamy urządzenia dla kanału 7 digitalWrite(6, LOW); } //KANAL 8 if( millis() >= (last_millis + opoznienie8 + czas8)) { //tutaj wyłączamy urządzenia kanału 8 digitalWrite(5, HIGH); } else if( millis() >= (last_millis + opoznienie8)) { //tutaj uruchamiamy urządzenia dla kanału 8 digitalWrite(5, LOW); } }
-
Cześć. Chciałbym zaprezentować projekt sterownika pieca dwufuncyjnego na paliwo ciekłe - gaz ziemny. Założenia projektowe: utrzymanie zadanej temperatury w pomieszczeniu/ mieszkaniu w okresie zimowym; wyświetlanie temperatur pomieszczenia, nastaw, godziny daty, stanu pracy pieca. BOM:arduino uno, serwo modelarskie sg90, czujnik temperatury lm335, wyświetlacz LCD 1.8" ST7735 waveshare, zegar rtc, obudowa wydruk 3d, materiał easy PET-G, zasilacz 9V DC, śruby, nakrętki, magnesy neodymowe. Działanie: urządzenie mierzy temperaturę otoczenia a następnie dostosowuje położenie pokrętła w celu załączania pieca. Jest to rozwiązanie najmniej ingerujące w jego działanie. Wykorzystanie przekaźnika przerywającego zasilanie powoduje natychmiastowe wyłącznenie pompy. Powyższe rozwiązanie powoduje tylko przekręcenie pokrętła do pozycji "0", przez co piec wygasza się zgodnie ze swoim cyklem pracy. Modyfikacja w piecu polegała na wymontowaniu oryginalnego pokrętła i włożeniu w jego miejsce ramienia połączonego z serwomechanizmem. Całość zmontowano w samodzielnie zaprojektowanej obudowie, wydrukowanej w technologii 3d. Korpus utrzymywał się na obudowie pieca za pomocą magnesów neodymowych, przez co nie ma konieczności wiercenia otworów.



- 5 odpowiedzi
-
- 3
-

-
- sterownik
- sterowanie
- (i 3 więcej)
-
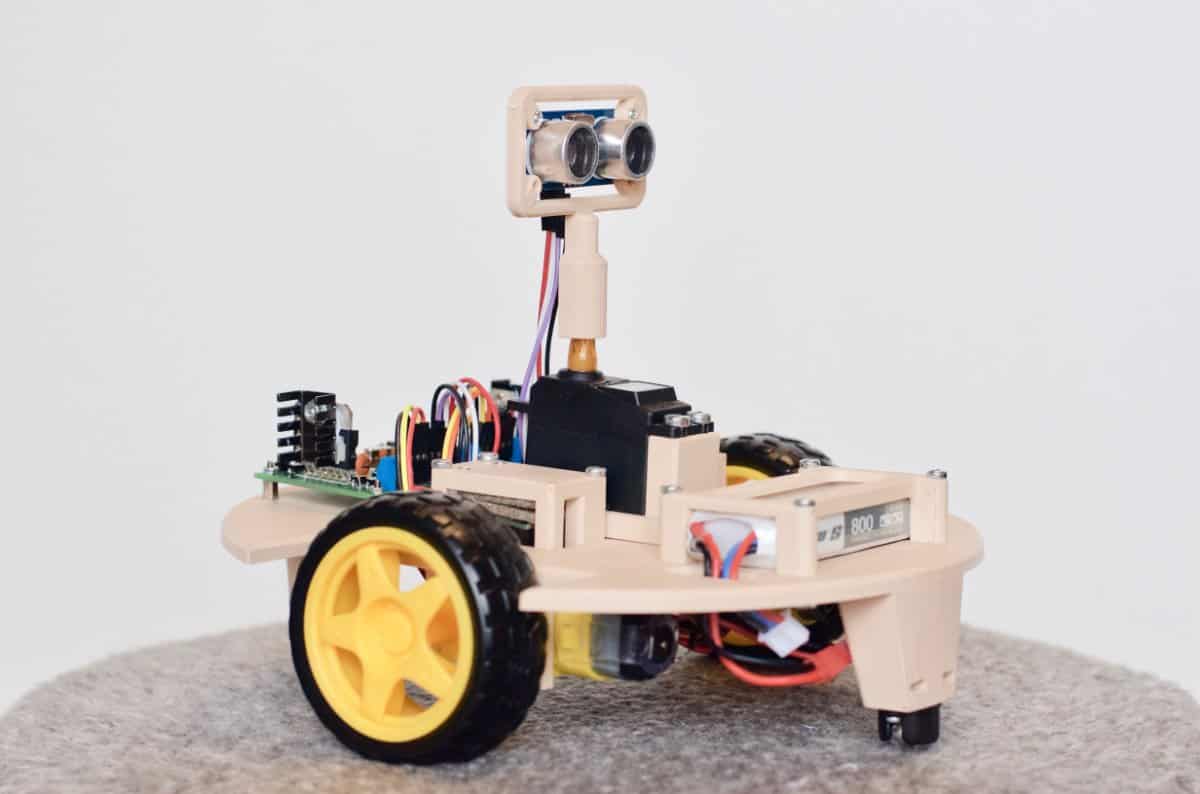
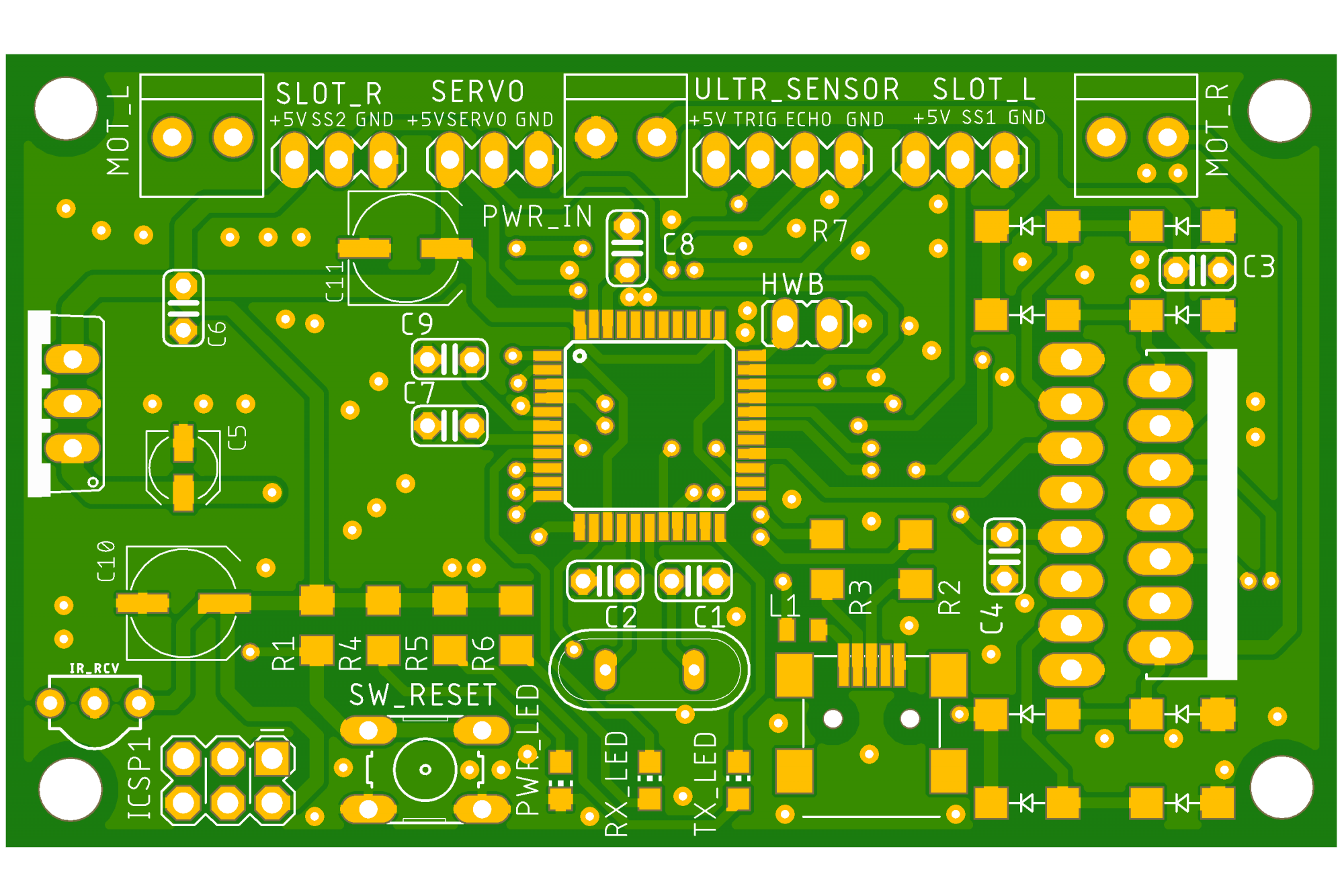
 Robot unikający przeszkód z regulacją napędu silników prądu stałego Cześć! Ponad rok temu skonstruowałem w ramach przedmiotu na studiach robota unikającego przeszkody. Po czasie pomyślałem, że konstrukcją warto podzielić się na Forbocie. Zakres projektu Robot porusza się na dwóch kołach i omija przeszkody wykrywane za pomocą czujnika ultradźwiękowego. Dużo pracy włożono w sterowanie silnikami prądu stałego, które stanowią napęd robota. Mimo że zakres zachowań platformy nie jet zbyt szeroki, to wartość projektu leży w algorytmach teorii sterowania, które skonstruowano by zwiększyć precyzję ruchów. W zakres prac projektowych weszły: projekt platformy robota i jej wykonanie w technologii druku 3D (Fusion 360), projekt układu drukowanego z mikroprocesorem Atmega32u4, mostkiem H oraz paroma innymi peryferiami (Autodesk Eagle), oprogramowanie robota pozwalające na wykrywanie i omijanie przeszkód (biblioteki i bootlader Arduino), konstrukcja pętli sprzężenia zwrotnego dla silników oparta na użyciu enkoderów szczelinowych, algorytm regulatora PI do synchronizacji prędkości kół przy jeździe na wprost (poprawia utrzymanie kierunku jazdy), algorytm zagnieżdżonego regulatora obrotu platformy o zadany kąt (algorytm podobny jak ten stosowany w serwomechanizmach), prosta identyfikacja parametrów transmitancji użytych silników i trochę rozważań na temat możliwości strojenia regulatorów przy pomocy metody linii pierwiastkowych. W ramach zaliczenia projektu powstał dosyć długi raport, gdzie jest opisane jak zrealizowano poszczególne części projektu, dlatego nie ma chyba potrzeby przedstawiać w poście szczegółów po raz drugi. Gdyby ktoś szukał informacji o przenoszeniu swojego projektu z Arduino na własną płytkę PCB (z działającym USB na Atmedze32u4), konstrukcji systemów regulacji w praktyce, czy budowy własnych serwomechanizmów to można tam znaleźć działające przykłady. Kod projektu i dokumentację można znaleźć na GitHubie. Oczywiście projekt nie jest idealny, szczególnie że powstał już jakiś czas temu, a wraz ze zdobywaniem doświadczenia dostrzega się coraz więcej błędów. Na koniec dorzucam parę grafik i gifów, więcej można znaleźć w podlinkowanym raporcie i repozytorium. Ujęcia na robota z różnych stron Wierzchnia strona płytki PCB, spód oraz schemat elektryczny w raporcie Utrzymywanie kierunku jazdy Obrót o zadany kąt
Robot unikający przeszkód z regulacją napędu silników prądu stałego Cześć! Ponad rok temu skonstruowałem w ramach przedmiotu na studiach robota unikającego przeszkody. Po czasie pomyślałem, że konstrukcją warto podzielić się na Forbocie. Zakres projektu Robot porusza się na dwóch kołach i omija przeszkody wykrywane za pomocą czujnika ultradźwiękowego. Dużo pracy włożono w sterowanie silnikami prądu stałego, które stanowią napęd robota. Mimo że zakres zachowań platformy nie jet zbyt szeroki, to wartość projektu leży w algorytmach teorii sterowania, które skonstruowano by zwiększyć precyzję ruchów. W zakres prac projektowych weszły: projekt platformy robota i jej wykonanie w technologii druku 3D (Fusion 360), projekt układu drukowanego z mikroprocesorem Atmega32u4, mostkiem H oraz paroma innymi peryferiami (Autodesk Eagle), oprogramowanie robota pozwalające na wykrywanie i omijanie przeszkód (biblioteki i bootlader Arduino), konstrukcja pętli sprzężenia zwrotnego dla silników oparta na użyciu enkoderów szczelinowych, algorytm regulatora PI do synchronizacji prędkości kół przy jeździe na wprost (poprawia utrzymanie kierunku jazdy), algorytm zagnieżdżonego regulatora obrotu platformy o zadany kąt (algorytm podobny jak ten stosowany w serwomechanizmach), prosta identyfikacja parametrów transmitancji użytych silników i trochę rozważań na temat możliwości strojenia regulatorów przy pomocy metody linii pierwiastkowych. W ramach zaliczenia projektu powstał dosyć długi raport, gdzie jest opisane jak zrealizowano poszczególne części projektu, dlatego nie ma chyba potrzeby przedstawiać w poście szczegółów po raz drugi. Gdyby ktoś szukał informacji o przenoszeniu swojego projektu z Arduino na własną płytkę PCB (z działającym USB na Atmedze32u4), konstrukcji systemów regulacji w praktyce, czy budowy własnych serwomechanizmów to można tam znaleźć działające przykłady. Kod projektu i dokumentację można znaleźć na GitHubie. Oczywiście projekt nie jest idealny, szczególnie że powstał już jakiś czas temu, a wraz ze zdobywaniem doświadczenia dostrzega się coraz więcej błędów. Na koniec dorzucam parę grafik i gifów, więcej można znaleźć w podlinkowanym raporcie i repozytorium. Ujęcia na robota z różnych stron Wierzchnia strona płytki PCB, spód oraz schemat elektryczny w raporcie Utrzymywanie kierunku jazdy Obrót o zadany kąt

-

Czołg Bluetooth - problem z zasilaniem i sterownikiem silników
Cinek97 opublikował temat w Arduino i ESP
Dobry wieczór, Jestem "świeży" w sprawach programowania kontrolerów takich jak arduino, ale musiałem zrobić projekt na uczelnie. Wybrałem sobie sterowany przez moduł bluethooth XM-15 czołg. Podłączyłem wszystko z lekką pomocą stworzyłem połączenie z telefonem, przy użyciu terminala arduino "odpowiadało mi". Więc dodałem bibliotekę do silników dodałem kilka linijek kodu i wtedy zaczął się problem. Używam shielda z L293D i póki arduino jest połączone z komputerem czołg się porusza, ale jeśli podepnę zasilanie do złącza DC, nic nie działa. Używam Arduino Leonardo, a moduł bluethooth jest połączony do pinów 10,11. Czy to wina płytki czy coś w kodzie mam nie tak? Drugie pytanie czy da się zamiast terminala sterować za pomocą "gotowych kontrolerów" z google marketu. Poniżej kod programu: #include <SoftwareSerial.h> #include <MotorDriver.h> //Deklaracja portu szeregowego dla Bluetootha SoftwareSerial Bluetooth(10, 11); //Utworz instancje Bluetooth 10-RX 11-TX int buffer_in[200]; int i=0; int BluetoothDane; //do zmiennej int będą zapisywane odebrane dane MotorDriver m; int jade=0; void setup() { //i=0; // jade=0;//uruchomienie transmisji z terminalem while(!Serial); Serial.begin(9600); Bluetooth.begin(9600); //uruchom SerialSoftware z prędkością 9600 baud //Serial.println("Polaczyles sie z modulem Bluetooth czolgiem"); // digitalWrite(13,LOW); } void loop() { if (Bluetooth.available()) //Jeśli są jakieś dane { i=0; while (Bluetooth.available()>0) //Odczytujemy dane z bluetooth aż odczytamy wszystko { buffer_in[i]=Bluetooth.read(); //kopiuje dane z bluetooth do bufora i++; } digitalWrite (13,HIGH); Serial.println("Odebrano =\n"); Serial.print(i); //Serial.print("Zawartosc bufora\n"); for(int j=0;j<i-5;j++) Serial.println(buffer_in[j]); Serial.print("Koniec bufora\n"); if (i>0) //sprawdzamy czy cokolwiek odebraliśmy { //jesli tak to sprawdzamy co w buforze if (buffer_in[0]==1) { Serial.println("jade do przodu"); m.motor(1,FORWARD,255); m.motor(4,FORWARD,255); } if (buffer_in[0]==2) { Serial.println("jade do tylu"); m.motor(1,BACKWARD,255); m.motor(4,BACKWARD,255); } if (buffer_in[0]==3) { Serial.println("prawo"); m.motor(1,FORWARD,255);; m.motor(4,BRAKE,0); } if (buffer_in[0]==4) { Serial.println("lewo"); m.motor(4,FORWARD,255); m.motor(1,BRAKE,0); } if (buffer_in[0]==5) { Serial.println("Stop"); m.motor(1,BRAKE,0); m.motor(4,BRAKE,0); } //jak już sprawdzilismy co w buforze to trzeba go wyczyscic // i w następnym przebiegu petli znowu czekamy na coś co przyjdzie z blue memset(buffer_in, 0, sizeof(buffer_in)); } delay(1); //odczekaj 1ms } } -
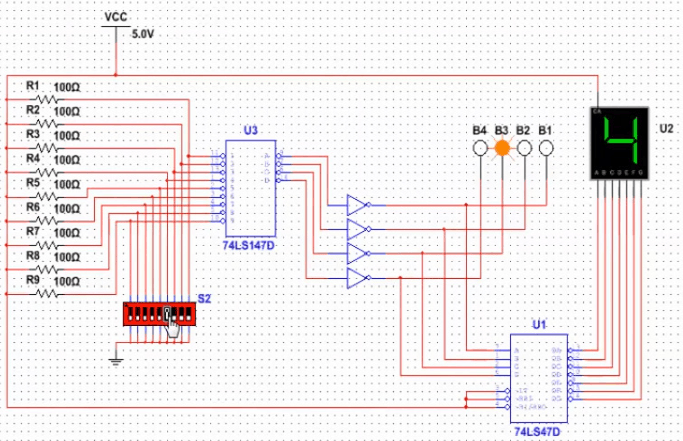
Witajcie Forumowicze, Zamarzył mi się kiedyś wyświetlacz biegów w motocyklu. Stwierdziłem, że zamiast kupować, można zrobić go samemu. Będzie większa frajda 😃 Wykorzystam wyświetlacz 7 segmentowy ze wspólną anodą. Jako dekoder chciałbym użyć układ 4543, gdyż jak wyczytałem wyświetla pełną 6 i 9. W motocyklu mam 6 pinów, odpowiadających 6 biegom, na których przy poszczególnych biegach pojawia się stan niski (masa). I tu mam problem, bo nie wiem jak zredukować te sygnały na kod BCD. W necie znalazłem podobny schemat, jak poniżej, jednak nie mogłem znaleźć w Polsce układu 74ls147d, żeby go potestować. Czy wiecie, gdzie można go dostać, pod inną nazwą? Może mogę go zastąpić jakimś podobnym układem logicznym? Będę wdzięczny za wszystkie wskazówki. P.S. Jak się nie uda nic znaleźć, to za pomocą Arduino zaprogramuję sobie Atmegę. Wyjście awaryjne. 😀
-
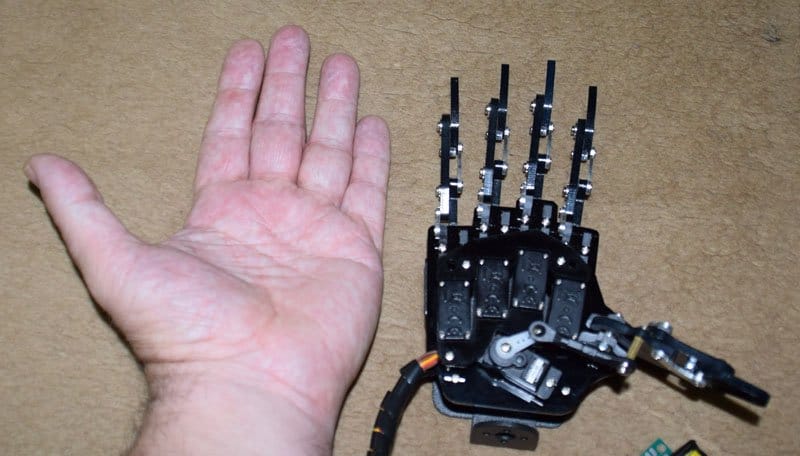
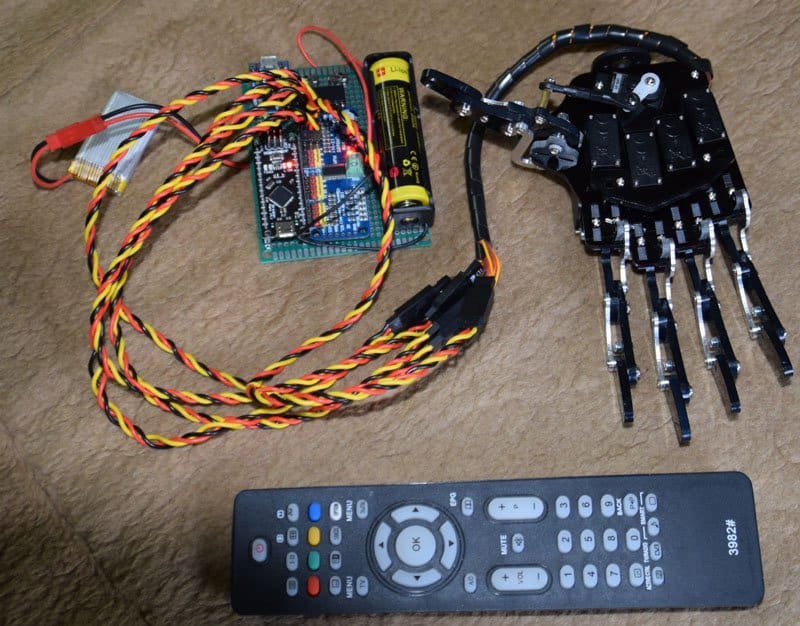
Projekt Rąsia jest trochę wzorowany na projekcie z filmu Rodzina Adamsów. Może na razie nie aż tak perfekcyjny, ale realny. Mechanizm dłoni (prawej) został zakupiony tradycyjnie na stronie chińskiej (link na mojej stronie). Dostawa trwała wyjątkowo długo, ale była z miłą niespodzianką - dłoń była całkowicie zmontowana. Umożliwiło to pierwsze eksperymenty praktycznie w ciągu 15 minut od rozpakowania paczki. Jako układ sterowania posłużył moduł sterowania ramienia (opis na stronie). Obecnie program został przeniesiony na płytkę Arduino Uno, moduł sterowania został dostosowany do pinów Uno. Żeby Rąsia mogła mówić dodany został moduł odtwarzania dźwięku z Mówiącej Kostki - ładnie liczy na paluszkach. W związku z tym, że jest zima Rąsia otrzymała śliczną różową rękawiczkę. Urządzenie wzbudza pewien niepokój wśród ludzi, którzy doznali zaszczytu bezpośredniego kontaktu z Rąsią, ale nie należy się dziwić - nie jesteśmy jeszcze przyzwyczajeni do robotów. I tak już całkiem poważnie - projekt jest nie tylko zabawą. Ma na celu konstrukcję asystenta osoby niepełnosprawnej sterowanego głosowo i poruszającego się samoczynnie. Również będą prace nad sterowaniem bionicznym. http://www.ksiega-cesarska.pl/443758128



-
W ostatnim czasie zorientowałem się, że trochę życie by mi ułatwiło urządzenie, które pozwoliło by mi sterować odtwarzaczem multimediów odpalanym na urządzeniu (telefonie) z Androidem. Całość byłoby niewielkim pilotem podobnym do tych znanych ze standardowych słuchawek np. takich: Widzimy tam po prawej stronie pilot do sterowania głośnością oraz włączaniem i zatrzymywaniem odtwarzacza. Chciałbym zrobić coś podobnego w formie niewielkiej płytki z kilkoma przyciskami fizycznymi działającej najlepiej bezprzewodowo (komunikacja poprzez Bluetooth). Funkcje o których myślę to zwiększanie i zmniejszanie głośności (2 przyciski: [+] i [-]), pauza/start (1 przycisk) i jeśli się da oraz jeśli odtwarzacz to obsługuje to szybkie cofanie się lub przeskakiwanie o kilka sekund do przodu w zależności od odtwarzacza (2 przyciski: [>] i [<]). Słuchawki z obrazka sam posiadam i ten pilot działa z wieloma odtwarzaczami - aplikacja YouTube, TuneIn i wiele innych. Mnie interesuje podobna funkcjonalność tj. kompatybilność z wieloma odtwarzaczami. Moje pytania to: 1. Jakie elementy elektroniczne będą potrzebne do wykonania urządzenia. 2. Jakie oprogramowanie będzie potrzebne (łącznie z technologiami i językami programowania). 3. Jaki jest poziom skomplikowania projektu - do ogarnięcia dla początkującego, średnio zaawansowanego, eksperta itd. Będę wdzięczny za wszelką pomoc. Informacje ogólne jak działają tego typu piloty i w jaki sposób potrafią działać z różnymi odtwarzaczami też będą pomocne.
-
Witam, Dopiero zaczynam moją przygodę z Arduino i mam zamiar zrealizować projekt systemu sterowania rozjazdami na mojej makiecie kolejowej. Każdy rozjazd ma być przesuwany za pomocą zamontowanego pod makietą serwomechanizmu SG90 (razem 10 serwomechanizmów). Każde serwo reagować ma na zmianę pozycji swojego przełącznika dwupozycyjnego - w momencie przełączenia, zmienić pozycję o około 30 stopni i w niej pozostać, przy zmianie pozycji przełącznika do pierwotnej - serwo również ma wrócić do pozycji pierwotnej. Dodatkowo, przy każdym przełączniku mają być dwie diody, zawsze świecić ma się jedna z nich w zależności od pozycji, w jakiej znajduje się dany serwomechanizm. Posiadam Arduino Uno, oraz Adafruit servo shield pozwalający na podłączenie do 16 serw. Stąd moje pytanie do bardziej doświadczonych kolegów: czy przy użyciu Adafruit mogę coś takiego zrobić? Czy w ogóle przełączniki dwupozycyjne z dźwignią są do zastosowania w tego typu projekcie? Uwagi dotyczące połączeń i zaprogramowania mile widziane, za każdą pomoc z góry dziękuję 😀
- 12 odpowiedzi
-
- 1
-
-
- Arduino
- sterowanie
- (i 1 więcej)
-
Witam Jestem bardziej niż początkującym w tematach mikrokontrolerów i elektroniki, więc proszę o wyrozumiałość. Od jakiegoś czasu planuje zrobić robota wykorzystującego czujnik ultradźwiękowy (między innymi) do mapowania terenu. Ale dopiero od paru dni zacząłem szperać i czytać jak to zrobić krok po kroku. Ha. Nawet znalazłem coś podobnego na forum https://forbot.pl/forum/topic/11454-prosty-ultradzwiekowy-skaner-otoczenia-2d-360-stopni/ Rozbiłem się już na początkowych pytaniach, ale w tym temacie chciałbym zapytać konkretnie o jeden z nich: 1. Mianowicie jeżeli mam już arduino (z kursu arduino, który do teraz zbierał u mnie kurz) to co mi jest potrzebne prócz serwa pracy ciągłej do zbudowania obrotowej wieżyczki na której będą zamontowane czujniki ultradźwiękowe? Rozumiem, że zależy od serwa, ale łączy się je przez shieldy, albo tworzy się jakieś układy, albo zasila niezależnie od arduino? Czy to przez pobór prądu? 2. Czy dostępne w różnych sklepach ( botland, kamami) shieldy do silników obsłużą też serwo? Czy muszę mieć konkretnie shield ze sterownikiem serw? 3. Czy jeżeli servo będzie miało duży pobór prądu to nie zakłóci w jakiś sposób pracy czujników? Wiem, że pytania banalne, ale może Panowie potraficie mnie choć naprowadzić na trop. Sam w miarę czasu i możliwości w chwilach wolnych od roboty staram się szperać po książkach i necie, ale temat niby prosty a jednak masę wiedzy należy sobie gdzieś ze szkoły przypomnieć, a większości przypadków od zera się uczyć.
-
 hej w ramach łączenia hobby z nauką chcę wykonać nastawny-wagowo dozownik kremu - jak wystarczy wiedzy i cierpliwości to z obrotową końcówka w celu uzyskania domowych i efektywnie wyglądających słodyczy: Niestety nie posiadam pomysłu na sposób dozowania - wiadomo w domowych warunkach robi się różne rzeczy więc dobrze by było gdyby dało się to używać zarówno jak i do puszystych(bita smietana) jak i do kremów szwedzkich (ciężkie kremy ubijane na bazie tłuszczu ) - myślę że pracę można by oprzeć na powtarzalnym pomiarze wagi albo objętości Czy ktoś kiedyś zajmował się dozowaniem z takim pomiarem, będę wdzięczna za wszystkie wskazówki i podpowiedzi
hej w ramach łączenia hobby z nauką chcę wykonać nastawny-wagowo dozownik kremu - jak wystarczy wiedzy i cierpliwości to z obrotową końcówka w celu uzyskania domowych i efektywnie wyglądających słodyczy: Niestety nie posiadam pomysłu na sposób dozowania - wiadomo w domowych warunkach robi się różne rzeczy więc dobrze by było gdyby dało się to używać zarówno jak i do puszystych(bita smietana) jak i do kremów szwedzkich (ciężkie kremy ubijane na bazie tłuszczu ) - myślę że pracę można by oprzeć na powtarzalnym pomiarze wagi albo objętości Czy ktoś kiedyś zajmował się dozowaniem z takim pomiarem, będę wdzięczna za wszystkie wskazówki i podpowiedzi