Przeszukaj forum
Pokazywanie wyników dla tagów 'bxCAN'.
Znaleziono 1 wynik
-

STM32F103 + CAN -> procek nie wypuszcza ramki z banków FIFO
amilo_pa opublikował temat w Mikrokontrolery
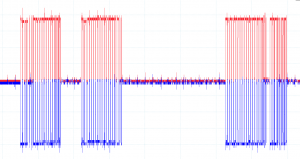
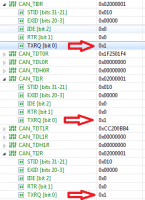
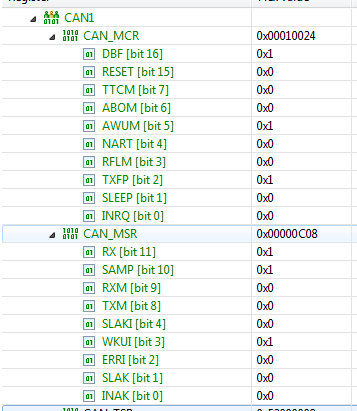
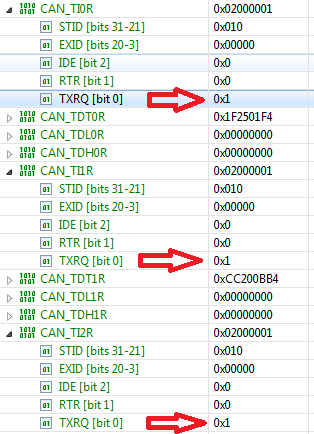
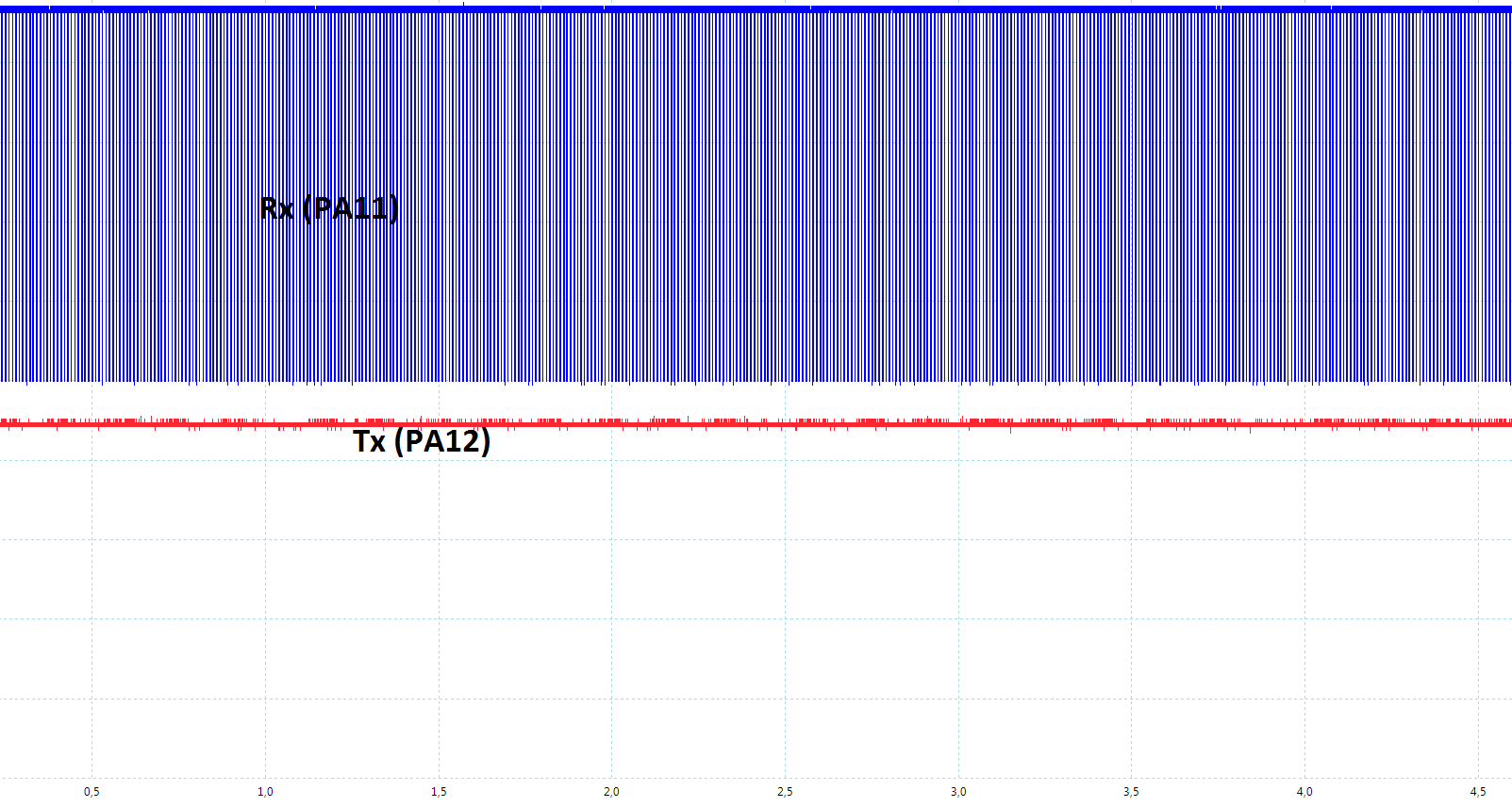
Hej wszystkim, Mam mały problem z zaimplementowaniem protokołu CAN na STM32F103 (tzw bluepillu). Ale po kolei. Mam Bluepilla podłączonego poprzez PA11 (CAN_Rx) i PA12 (CAN_Tx) do transceivera CJMCU-1051 (wejscia CRX -> PA11 i CTX -> PA12 ). Sygnały CANL oraz CANH wychodzące z transceivera) mam połączone z magistralą CAN na któej są już dwie nody i komunikują się ze sobą z baudratem = 500kBps (po sieci biegają 4 ramki): Więc sieć dzial. I teraz mój kod. Konfiguracja zegarów na maksymalne taktowanie - 72MHz ( PCLK1 zgodnie z RM ustawone na 36MHz): void RCC_Conf(void) { // RCC setting reset RCC_DeInit(); // Turn on HSE RCC_HSEConfig(RCC_HSE_ON); // Wait up to HSE will be ready HSEStartUpStatus = RCC_WaitForHSEStartUp(); if(HSEStartUpStatus == SUCCESS) { /* * the introduction of delays is (waitstate) for higher clock rates * is due to the maximum frequency with which it is performed * communication with Flash memory can be 24 MHz */ FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); // wait for flash memory FLASH_SetLatency(FLASH_Latency_2); // HCLK = SYSCLK RCC_HCLKConfig(RCC_SYSCLK_Div1); // PCLK2 = HCLK RCC_PCLK2Config(RCC_HCLK_Div1); // PCLK1 = HCLK/2 RCC_PCLK1Config(RCC_HCLK_Div2); // PLLCLK = 8MHz * 9 = 72 MHz RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9); // Turn on PLL RCC_PLLCmd(ENABLE); // Wait up to PLL will be ready while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET); // Select PLL as source of clock RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); // Wait up to PLL will be the source of clock while(RCC_GetSYSCLKSource() != 0x08); // Turn on Włączenie clock signal supervision system //RCC_ClockSecuritySystemCmd(ENABLE); } } SysTick skonfigurowany na 1ms: void SysTick_Conf (void) { SysTick_Config(F_PCLK2/8/1000); SysTick->CTRL &= ~SysTick_CTRL_CLKSOURCE_Msk; } No i czas na konfigurację CANa: void CAN_Config(void) { GPIO_InitTypeDef GPIO_InitStructure; uint8_t ststus = 10; /* Configure CAN1 IOs **********************************************/ /* GPIOA and AFIO clocks enable */ RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOA, ENABLE); /* Configure CAN1 RX pin */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//GPIO_Mode_IPU//GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure) /* Configure CAN1 TX pin */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); /* Configure CAN1 and CAN2 **************************************************/ /* CAN1 and Periph clocks enable */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE); /* CAN1 and CAN2 register init */ CAN_DeInit(CAN1); // CAN_DeInit(CAN2); /* Struct init*/ CAN_StructInit(&CAN_InitStructure); /* CAN1 and CAN2 cell init */ CAN_InitStructure.CAN_TTCM = DISABLE; CAN_InitStructure.CAN_ABOM = DISABLE; CAN_InitStructure.CAN_AWUM = ENABLE;//DISABLE; CAN_InitStructure.CAN_NART = DISABLE; CAN_InitStructure.CAN_RFLM = DISABLE; CAN_InitStructure.CAN_TXFP = ENABLE; CAN_InitStructure.CAN_Mode = CAN_Mode_Normal; CAN_InitStructure.CAN_SJW = CAN_SJW_4tq; CAN_InitStructure.CAN_BS1 = CAN_BS1_8tq; CAN_InitStructure.CAN_BS2 = CAN_BS2_3tq; /* 500KBps */ CAN_InitStructure.CAN_Prescaler =12; /*Initializes the CAN1 and CAN2 */ ststus = CAN_Init(CAN1, &CAN_InitStructure); // CAN_Init(CAN2, &CAN_InitStructure); /* CAN1 filter init */ CAN_FilterInitStructure.CAN_FilterNumber = 1; CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask; CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit; CAN_FilterInitStructure.CAN_FilterIdHigh = 0x1; CAN_FilterInitStructure.CAN_FilterIdLow = 0x0000; CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0x0000; CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0x0000; CAN_FilterInitStructure.CAN_FilterFIFOAssignment = 0; CAN_FilterInitStructure.CAN_FilterActivation = ENABLE; CAN_FilterInit(&CAN_FilterInitStructure); TxMessage.StdId = 0x10; TxMessage.ExtId = 0x00; TxMessage.RTR = CAN_RTR_DATA; TxMessage.IDE = CAN_ID_STD; TxMessage.DLC = 4; } w odpowiedzi na wywołanie funkcji ststus = CAN_Init(CAN1, &CAN_InitStructure); dostaję wartość1 czyli CAN_InitStatus_Success, co potwierdzają rejestry: W głównej pętli programu chcę wysyłać ramkę co 1s, zmienna source_time jest to zmienna inkrementowana w przerwaniu od SysTicka i to ją chcę wysyłać po magostrali while (1) { if(flag_) { TxMessage.Data[0] = (uint8_t)(source_time >> 24); TxMessage.Data[1] = (uint8_t)(source_time >> 16); TxMessage.Data[2] = (uint8_t)(source_time >> 8); TxMessage.Data[3] = (uint8_t)source_time; temp1 = CAN_Transmit(CAN1, &TxMessage); temp2 = CAN_GetLastErrorCode(CAN1); TransmitStatus[0] = CAN_TransmitStatus(CAN1,0); TransmitStatus[1] = CAN_TransmitStatus(CAN1,1); TransmitStatus[2] = CAN_TransmitStatus(CAN1,2); flag_ = 0; } } Rezultatem jest ustawienie się statusu transmisji na (wartość zwraca przez funkcję CAN_TransmitStatus) na pending dla wszystkich banków FIFO, co potwierdzają rejestry Po podłączeniu sond oscyloskopu pomiędzy uP a transceiver, można zaobserwować, że transceiver przepuszcza ramki biegające po CANie -> więc nie jest uszkodzony Reasumując, może ma ktoś pomysł dlaczego STM nie wypuszcza ramki do transcivera tylko jest cały czas w trybie pending?