
Polecane
Ciekawe i popularne projekty zbudowane przez użytkowników FORBOT-a.

Własny Stream Deck z Arduino UNO R4 i wyświetlaczem dotykowym
H1M4W4R1 napisał temat w Projekty - DIY,
-
-
- 0 odpowiedzi


Wybrane przez
Treker,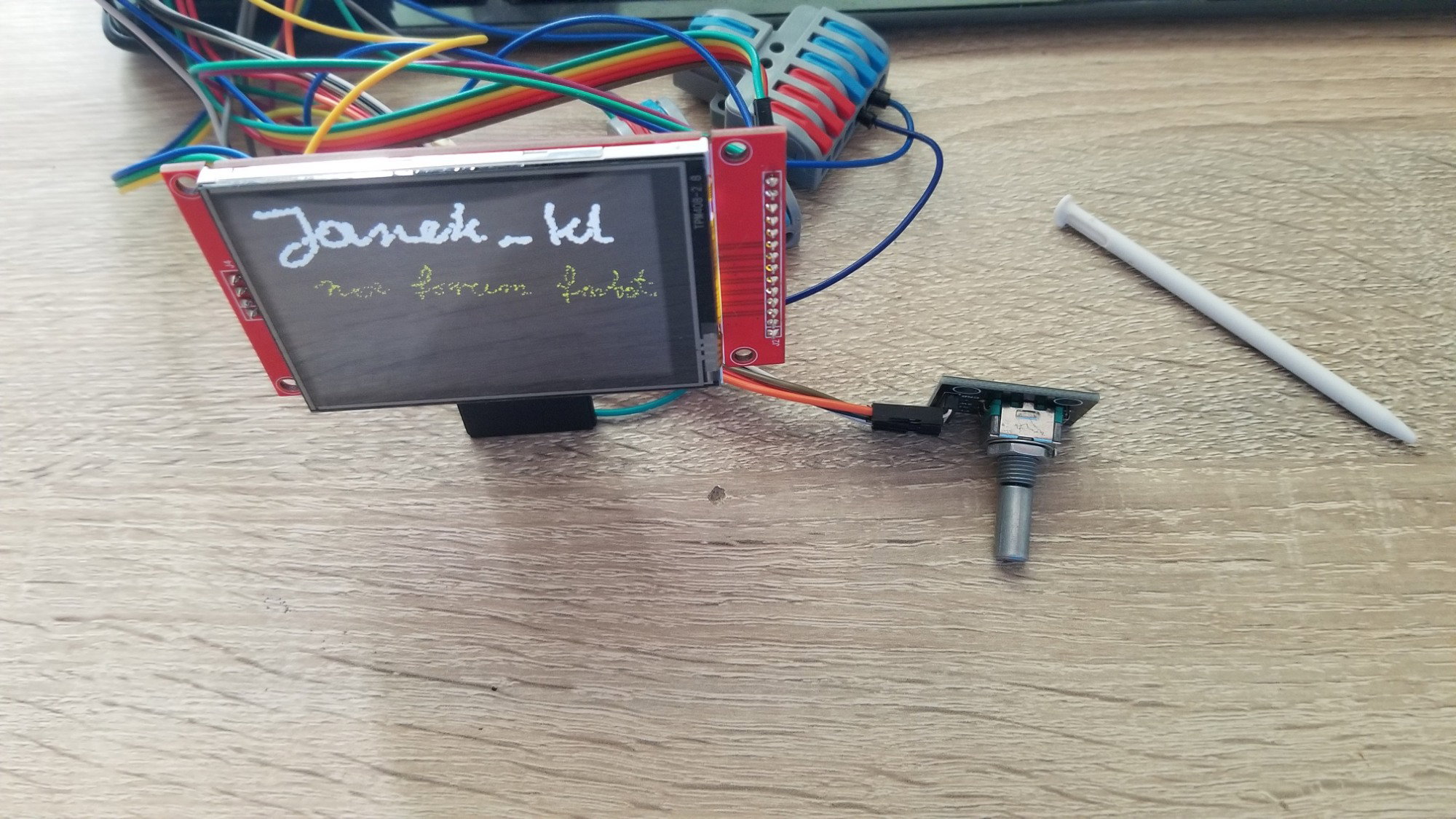
DIY Paint na ESP32-S3 z TFT 2.8"
janek_kl napisał temat w Projekty - DIY,
-
-
- 0 odpowiedzi

Wybrane przez
Optymistka,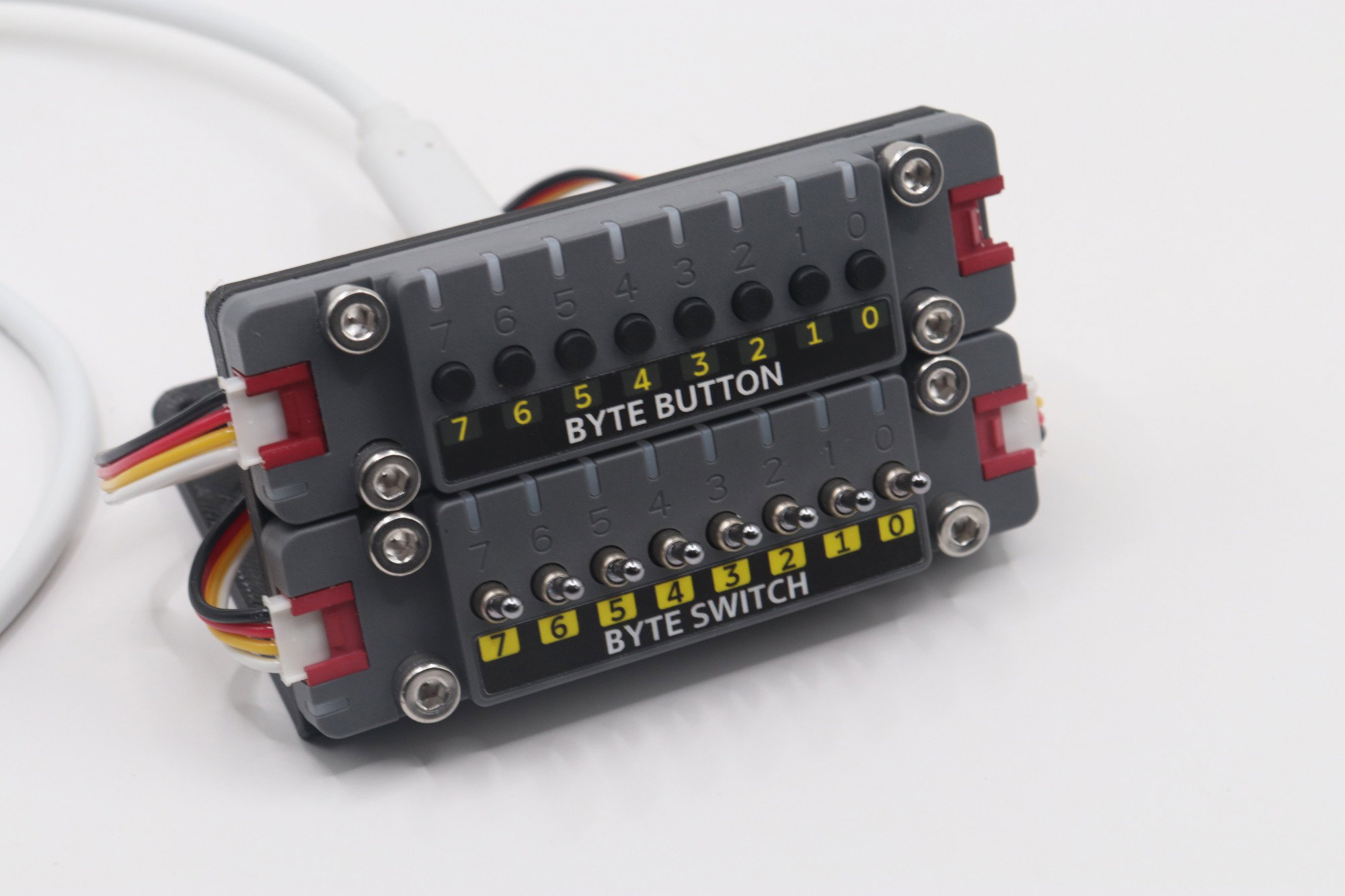
ButtonBox BLE - projekt DIY do gier, symulatorów i automatyzacji
H1M4W4R1 napisał temat w Projekty - DIY,
-
-
- 0 odpowiedzi
Wybrane przez
Treker,
Gra DIY zielone/czerwone światło inspirowana Squid Game
H1M4W4R1 napisał temat w Projekty - DIY,
-
-
- 2 odpowiedzi
Wybrane przez
Treker,
FNIRSI LCR-P1 - tester elementów elektronicznych - małe urządzenie, które pomaga rozpoznać elementy
H1M4W4R1 napisał temat w Artykuły użytkowników,
-
-
- 3 odpowiedzi
Wybrane przez
Treker,
Zdalnie sterowany zasilacz czasowy
H1M4W4R1 napisał temat w Projekty - DIY (mini),
-
-
- 0 odpowiedzi
Wybrane przez
Optymistka,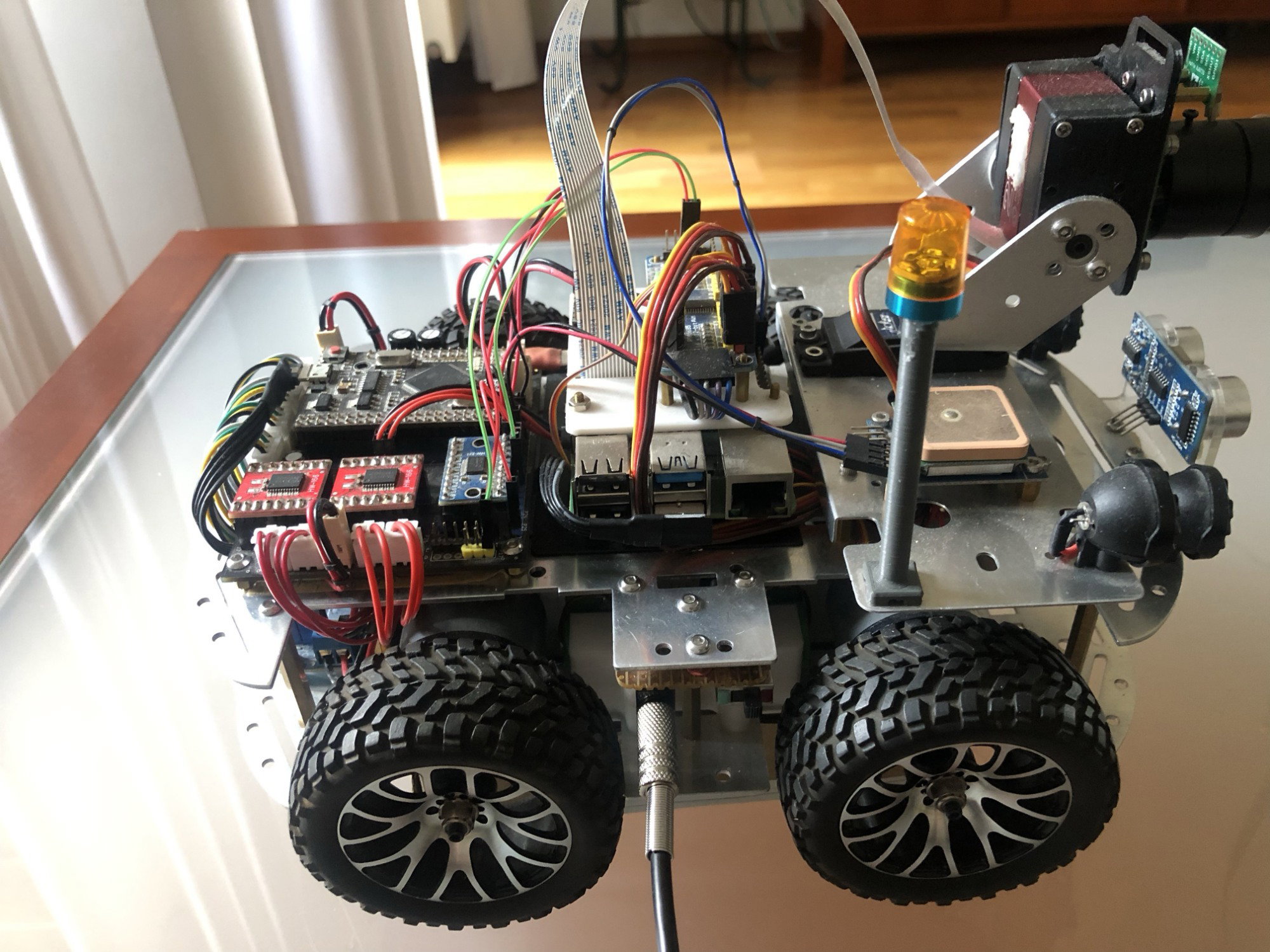
Robot edukacyjny 4WD (Raspberry Pi 4 + Arduino + PID)
RomekAtomek napisał temat w Projekty - DIY roboty,
-
-
- 3 odpowiedzi
Wybrane przez
Optymistka,
Podlewaczka - pierwszy projekt Arduino Nano
sebastianekkk napisał temat w Projekty - DIY (początkujący),
-
-
- 0 odpowiedzi
Wybrane przez
Optymistka,
Programista używa AI - tom II
H1M4W4R1 napisał temat w Artykuły użytkowników,
-
-
- 0 odpowiedzi

Wybrane przez
Optymistka,
Jak uruchomić sieć Meshtastic na płytkach XIAO? Test komunikacji na 2 km
rafal2808 napisał temat w Artykuły użytkowników,
-
-
- 1 odpowiedź
Wybrane przez
Treker,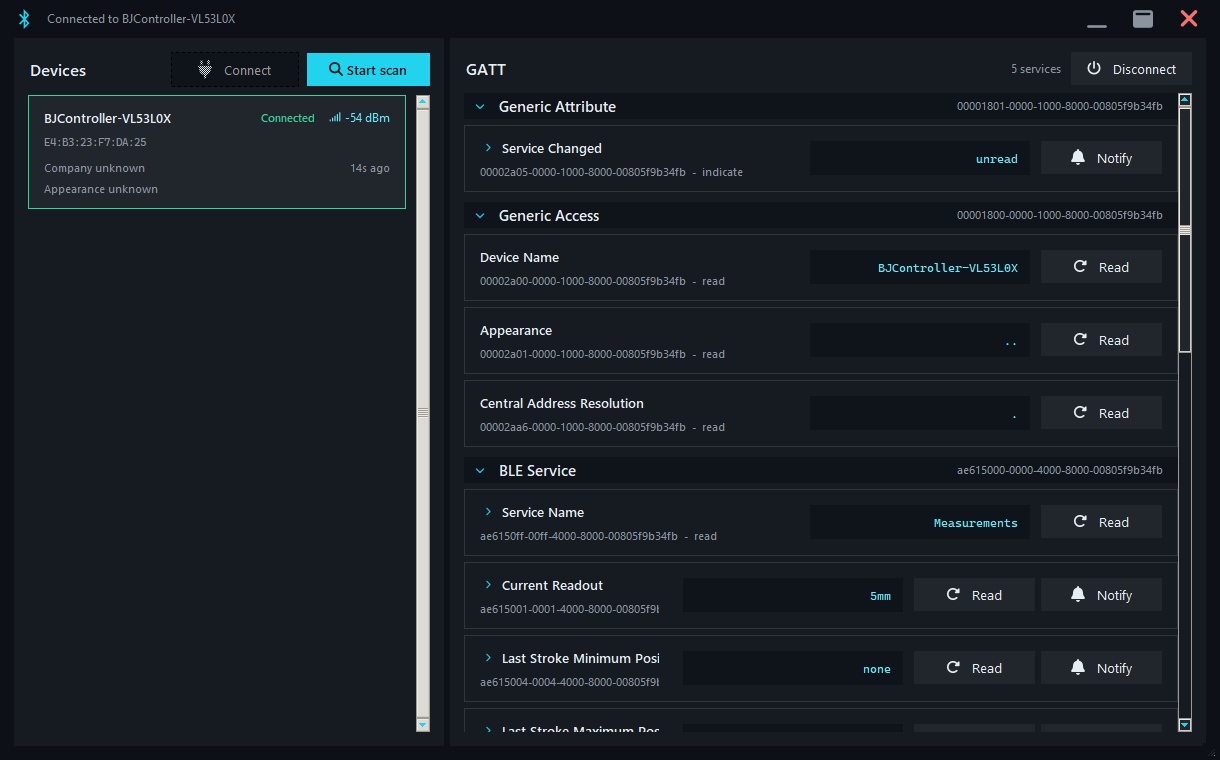
YABLE - Debugger BLE na Windowsa
H1M4W4R1 napisał temat w Projekty - DIY (mini),
-
-
- 8 odpowiedzi
Wybrane przez
Treker,
Inteligentny czujnik temperatury PC z ogniwa od e-papierosa
CyberGhostPL napisał temat w Projekty - DIY w budowie (worklogi),
-
-
- 19 odpowiedzi
Wybrane przez
Optymistka,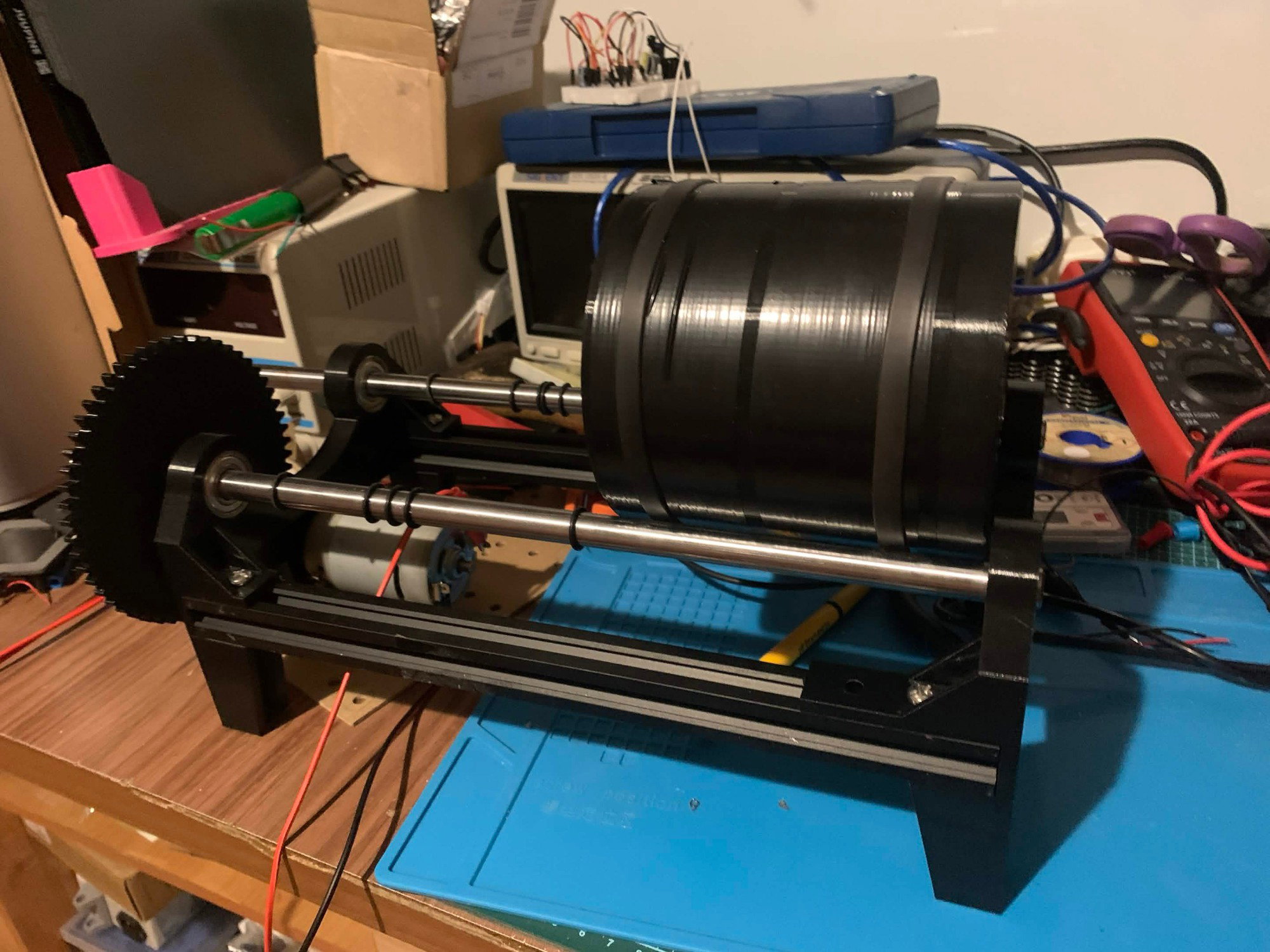
Młyn kulowy w wersji DIY
H1M4W4R1 napisał temat w Projekty - DIY,
-
-
- 2 odpowiedzi
Wybrane przez
Treker,
M5Stack - główne moduły i ich zastosowanie
H1M4W4R1 napisał temat w Artykuły użytkowników,
-
-
- 0 odpowiedzi
Wybrane przez
Treker,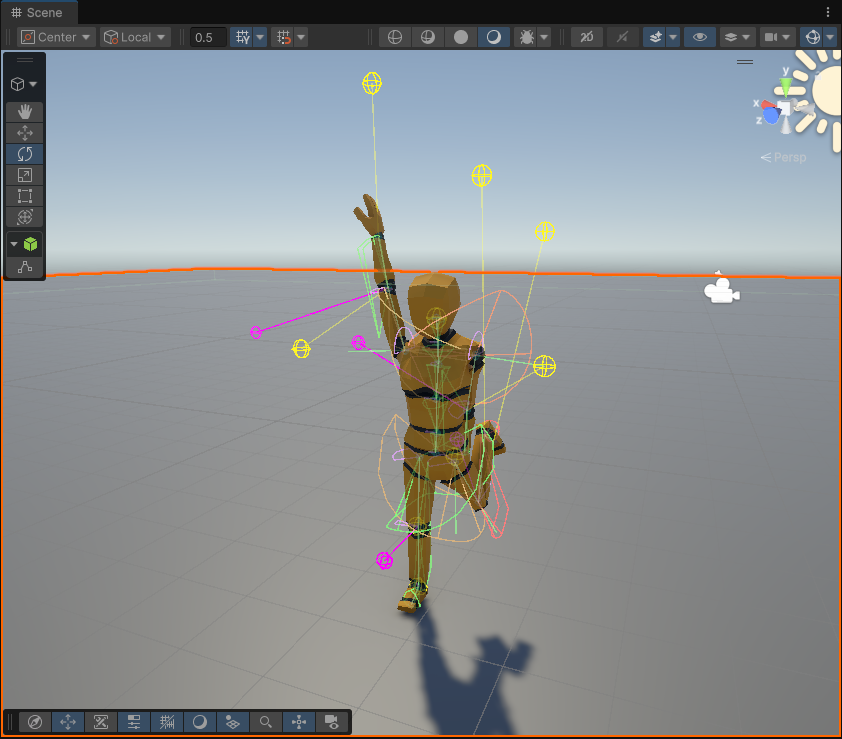
Programista vs AI
H1M4W4R1 napisał temat w Artykuły użytkowników,
-
-
- 28 odpowiedzi
Wybrane przez
Treker,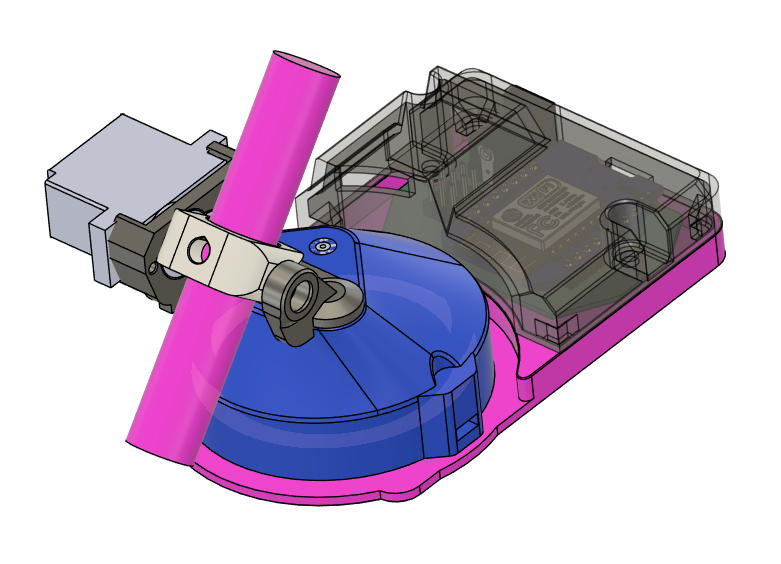
Kontroler Kota - mikro projekt
etet100 napisał temat w Projekty - DIY (mini),
-
-
- 1 odpowiedź
Wybrane przez
Treker,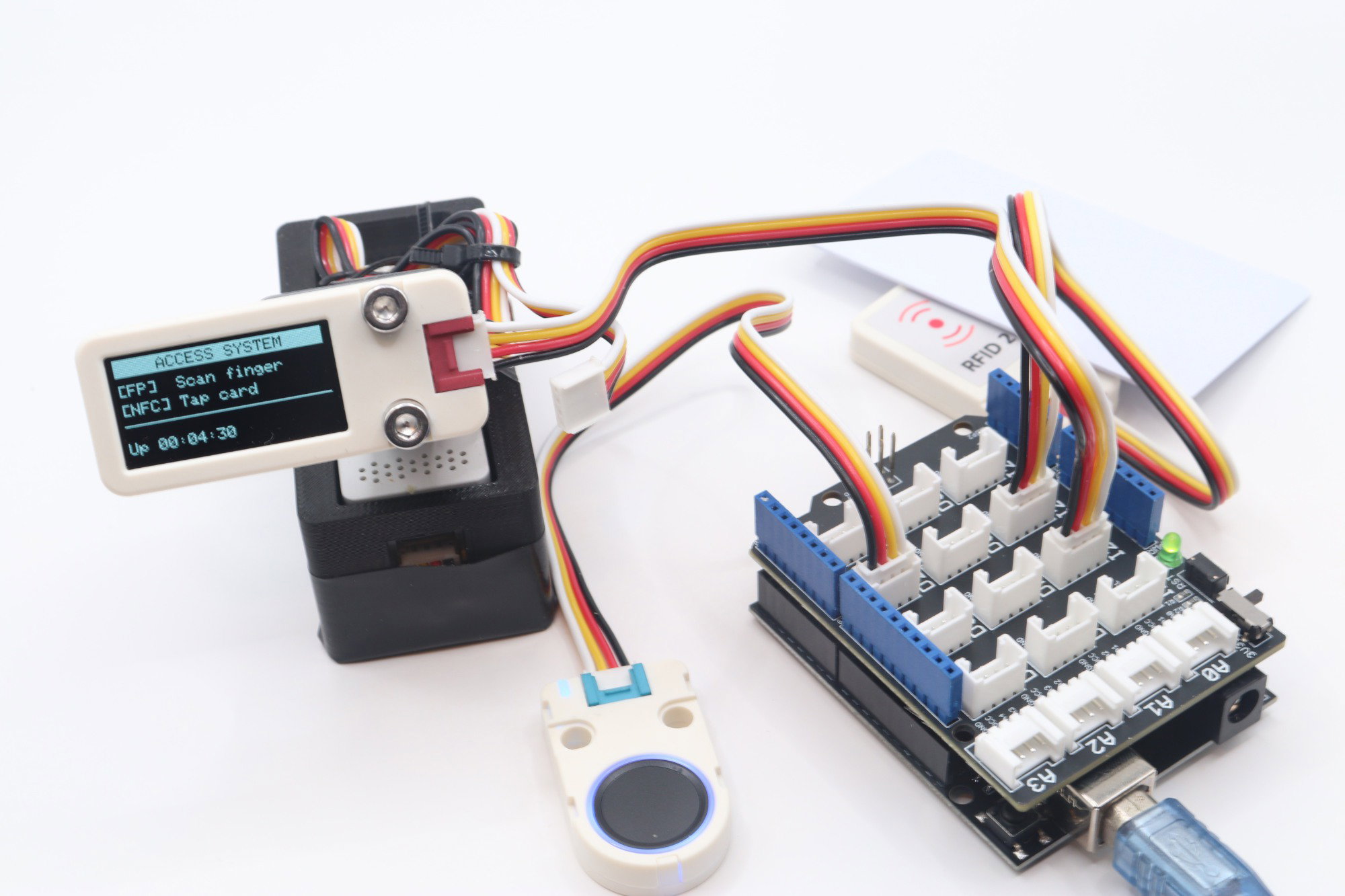
Zabawy z autoryzacją na M5Stack - RFID vs odcisk palca
H1M4W4R1 napisał temat w Projekty - DIY,
-
-
- 0 odpowiedzi
Wybrane przez
Treker,
Wewnętrzna stacja klimatyczna na M5Stack
H1M4W4R1 napisał temat w Projekty - DIY,
-
-
- 0 odpowiedzi
Wybrane przez
Treker,
Frezowanie płytek PCB w domu
H1M4W4R1 napisał temat w Artykuły użytkowników,
-
-
- 6 odpowiedzi
Wybrane przez
Optymistka,
Podlewaczka roślin w stylu minimalistycznym
H1M4W4R1 napisał temat w Projekty - DIY (mini),
-
-
- 6 odpowiedzi
Wybrane przez
Treker,
Miniaturowe płytki Seeed Studio XIAO - omówienie rodziny
rafal2808 napisał temat w Artykuły użytkowników,
-
-
- 0 odpowiedzi
Wybrane przez
Treker,
Biblioteka poldit czyli czytamy cyferki
ethanak napisał temat w Projekty - DIY,
-
-
- 1 odpowiedź
Wybrane przez
Optymistka,
Prosty zegar na układzie CPLD (wyświetlacze 7-seg.)
atlantis86 napisał temat w Projekty - DIY,
-
-
- 5 odpowiedzi
Wybrane przez
Optymistka,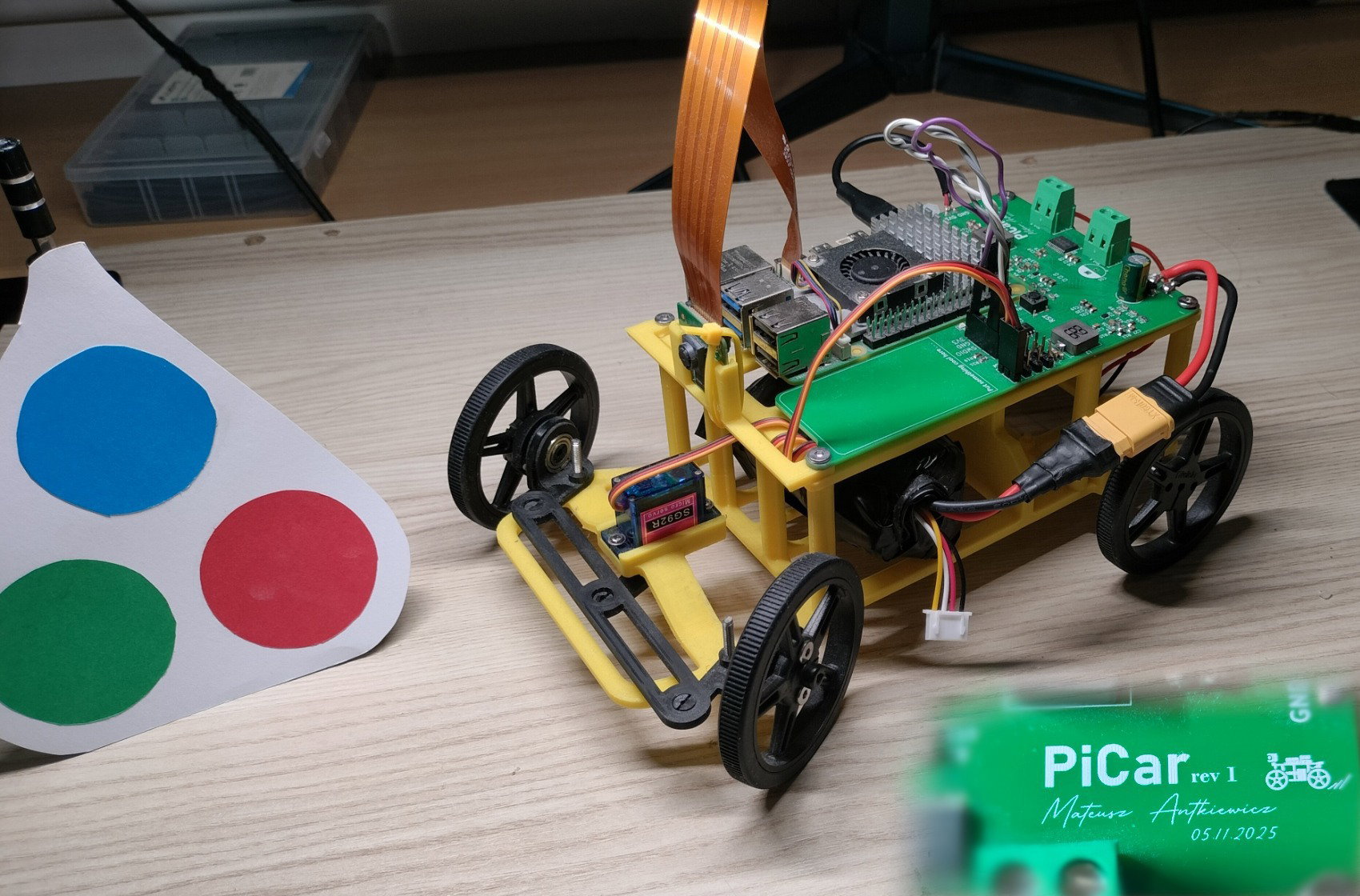
"PiCar" - Czterokołowy pojazd z funkcjami prostej jazdy autonomicznej i zdalnego sterowania
Gemyn napisał temat w Projekty - DIY roboty,
-
-
- 14 odpowiedzi
Wybrane przez
Optymistka,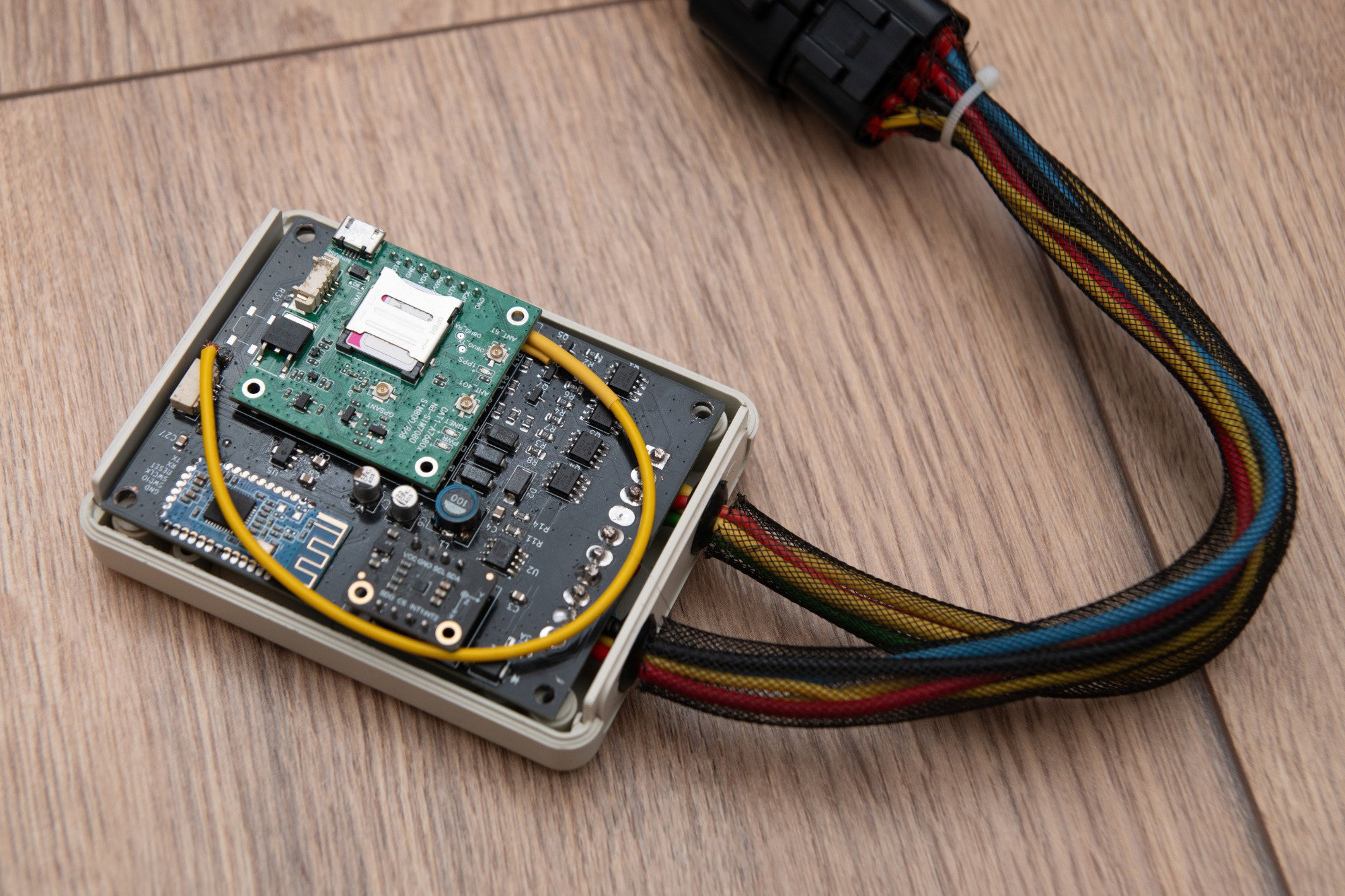
Smart alarm motocyklowy (akcelerometr i powiadomienie SMS)
DominikS1980 napisał temat w Projekty - DIY,
-
-
- 1 odpowiedź