Przeszukaj forum
Pokazywanie wyników dla tagów 'filtrkalmana'.
Znaleziono 1 wynik
-
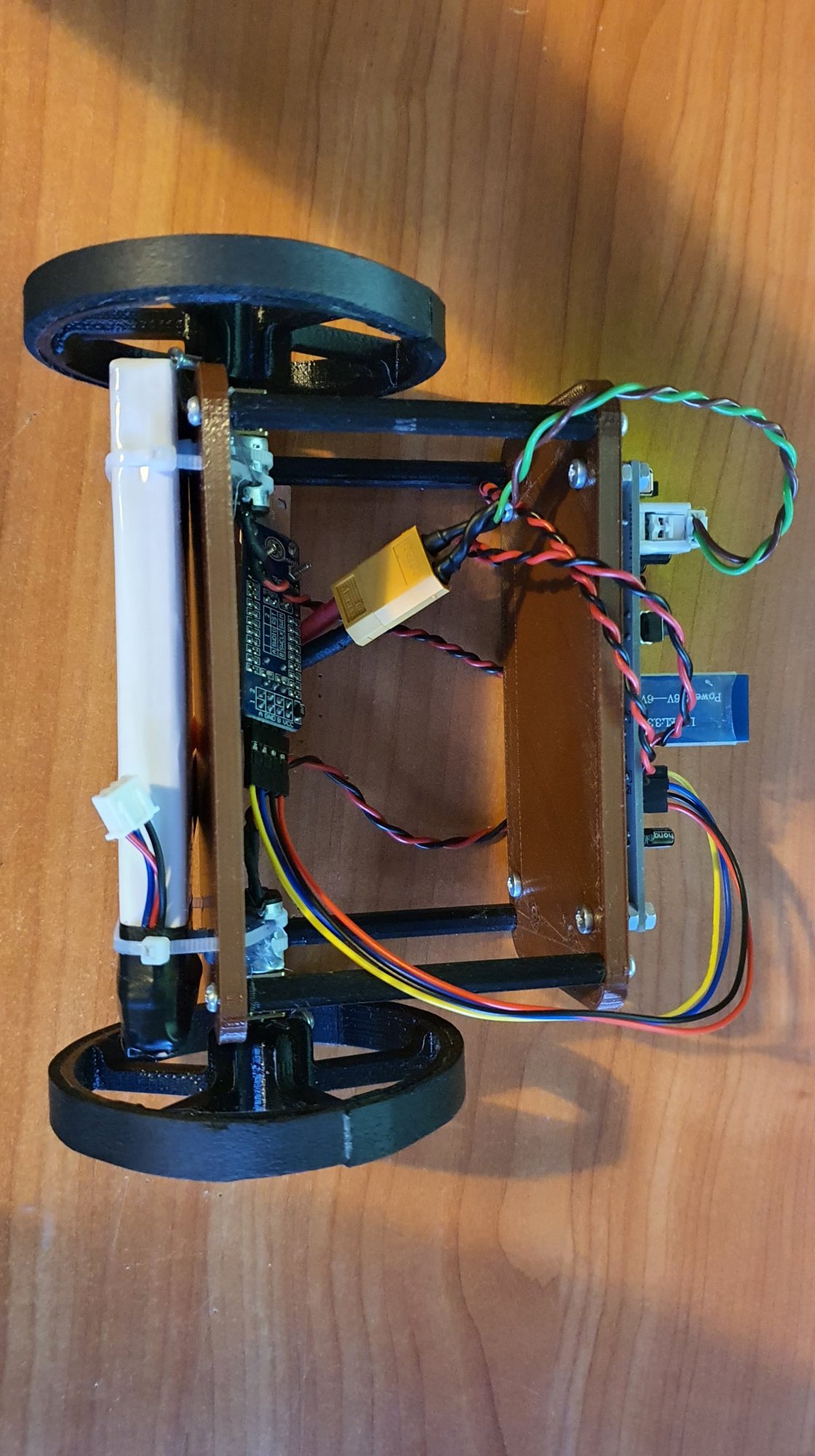
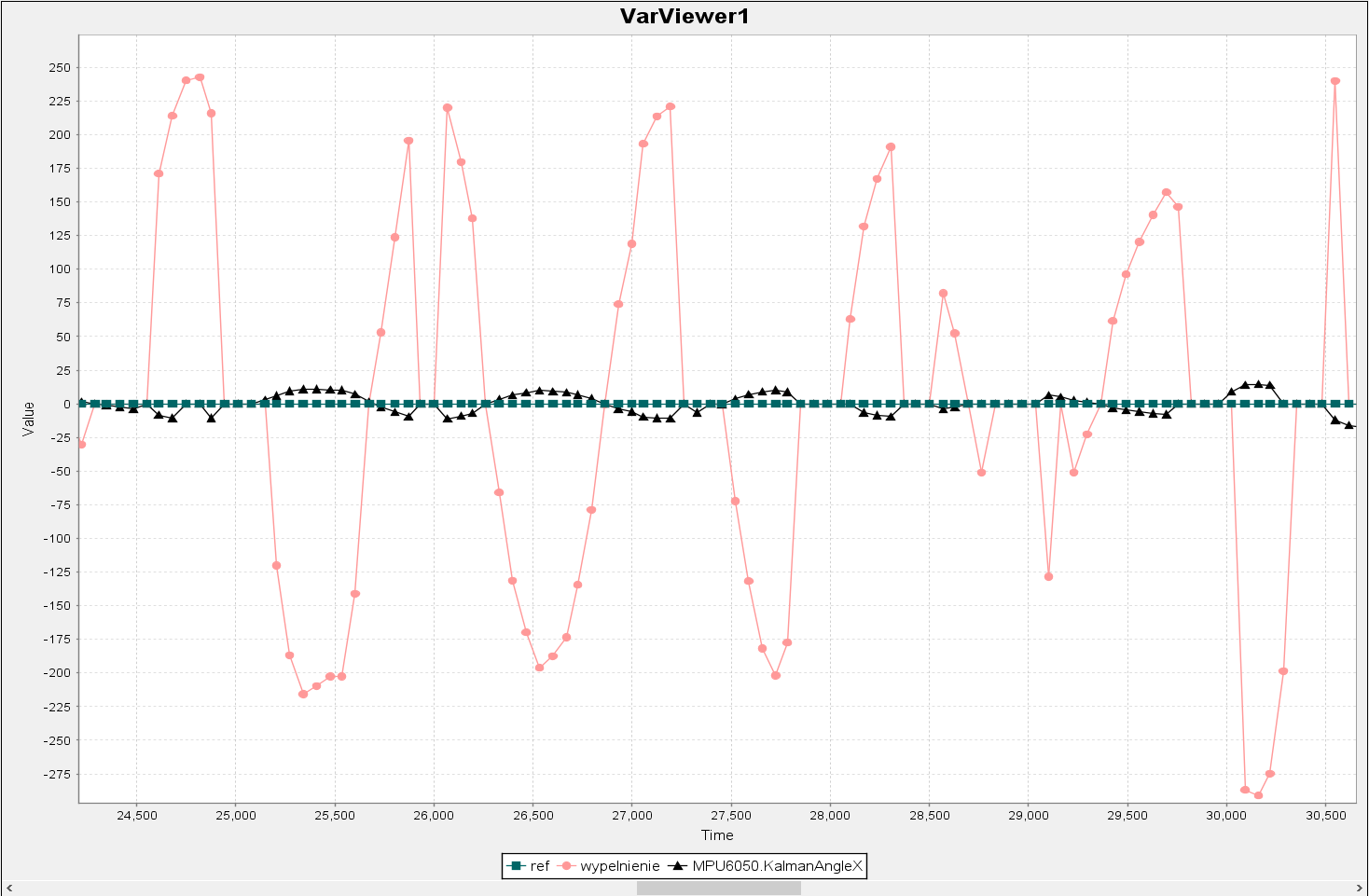
Siema, zbudowałem sobie takiego robota balansującego: i od miesiąca próbuję go zmusić do balansowania, a ten mnie nie słucha. MPU6050 -> filtr kalmana -> pid(na filmiku sam człon PD). Sterowanie wychyleniem wywoływane w w przerwaniu co ok 10 ms. I teraz moje pytanie : Czy kaszanię coś programowo, regulacyjnie, Czy skaszaniłem coś mechanicznie ? Tu podgląd z STMStudio ... robot.zip