
Przeszukaj forum
Pokazywanie wyników dla tagów 'Motor Shield'.
Znaleziono 2 wyniki
-
 Witam serdecznie, Borykam się z dziwnym dla mnie problemem, otóż zbudowałem sobie pojazd rc składający się z czterech silników, arduino, nakładki od iduino i modułu esp32 wroom do komunikacji wifi z telefonem. Do sterowania użyłem aplikacji z google play, który wysyła 5 zapytań GET; "GET /?State=F", "GET /?State=B","GET /?State=L","GET /?State=R", "GET /?State=S". Kolejno są to : przód, tył, lewo, prawo i stop. Sygnały schodzą na esp jak i są przekazywane na arduino dopóki układ jest zasilany z kabla usb. Niestety gdy uruchomię z zasilania bateryjnego, to silniki na sygnały nie reaguję, podobnie jest gdy obwód jest zasilany z kabla usb, a przełączę przycisk zasilania bateryjnego, to wywala komunikację z komputerem. Kod sterujący silnikami w zależności od otrzymanej komendy, a pod nim kod z esp32, który odbiera sygnały z telefonu i przekazuje na arduino. Wydaje mi się, że jest kwestia zasilania, ale nie dam sobie ręki uciąć, może ktoś miał podobny problem? Z góry dziękuję za odpowiedzi. #include <AFMotor.h> // Inicjalizacja motor shield AF_DCMotor motor1(1); // Motor 1 podłączony do kanału M1 AF_DCMotor motor2(2); // Motor 2 podłączony do kanału M2 AF_DCMotor motor3(3); // Motor 3 podłączony do kanału M3 AF_DCMotor motor4(4); // Motor 4 podłączony do kanału M4 void setup() { Serial.begin(9600); // Komunikacja z ESP32 Serial.println("Arduino is ready to receive commands"); } void loop() { if (Serial.available()) { char command = Serial.read(); Serial.print("Received command: "); Serial.println(command); switch (command) { case 'F': // Ruch do przodu Serial.println("Moving forward"); motor1.setSpeed(255); // Maksymalna prędkość motor1.run(FORWARD); motor2.setSpeed(255); motor2.run(FORWARD); motor3.setSpeed(255); motor3.run(FORWARD); motor4.setSpeed(255); motor4.run(FORWARD); break; case 'B': // Ruch do tyłu Serial.println("Moving backward"); motor1.setSpeed(255); motor1.run(BACKWARD); motor2.setSpeed(255); motor2.run(BACKWARD); motor3.setSpeed(255); motor3.run(BACKWARD); motor4.setSpeed(255); motor4.run(BACKWARD); break; case 'R': // Skręt w prawo Serial.println("Turning right"); motor1.setSpeed(255); motor1.run(FORWARD); motor2.setSpeed(255); motor2.run(BACKWARD); motor3.setSpeed(255); motor3.run(FORWARD); motor4.setSpeed(255); motor4.run(BACKWARD); break; case 'L': // Skręt w lewo Serial.println("Turning left"); motor1.setSpeed(255); motor1.run(BACKWARD); motor2.setSpeed(255); motor2.run(FORWARD); motor3.setSpeed(255); motor3.run(BACKWARD); motor4.setSpeed(255); motor4.run(FORWARD); break; case 'S': // Stop Serial.println("Stopping"); motor1.setSpeed(0); motor1.run(RELEASE); motor2.setSpeed(0); motor2.run(RELEASE); motor3.setSpeed(0); motor3.run(RELEASE); motor4.setSpeed(0); motor4.run(RELEASE); break; default: Serial.println("Unknown command"); break; } } } #include <WiFi.h> // Nazwa i hasło sieci Wi-Fi const char* ssid = "RC_CONNECTION"; const char* password = "12345678"; // Inicjalizacja serwera WiFiServer server(80); // Piny dla Serial1 const int RX_PIN = 16; const int TX_PIN = 17; void setup() { Serial.begin(115200); Serial1.begin(9600, SERIAL_8N1, RX_PIN, TX_PIN); // Używamy Serial1 do komunikacji z Arduino // Ustawienie ESP32 jako Access Point WiFi.softAP(ssid, password); Serial.println("Access Point utworzony:"); Serial.print("SSID: "); Serial.println(ssid); Serial.print("IP address: "); Serial.println(WiFi.softAPIP()); // Uruchomienie serwera server.begin(); } void loop() { WiFiClient client = server.available(); // Sprawdzenie, czy są klienci if (client) { Serial.println("New connection"); String currentLine = ""; // do trzymania danych z klienta while (client.connected()) { if (client.available()) { char c = client.read(); Serial.write(c); // Wysyła komendę do komputera przez Serial if (c == '\n') { // Przetwarzanie żądania GET Serial.println("Processing request:"); Serial.println(currentLine); // Wysłanie komendy do Arduino przez Serial1 if (currentLine.indexOf("GET /?State=F") >= 0) { Serial1.println("F"); } else if (currentLine.indexOf("GET /?State=B") >= 0) { Serial1.println("B"); } else if (currentLine.indexOf("GET /?State=R") >= 0) { Serial1.println("R"); } else if (currentLine.indexOf("GET /?State=L") >= 0) { Serial1.println("L"); } else if (currentLine.indexOf("GET /?State=S") >= 0) { Serial1.println("S"); } // Wysłanie odpowiedzi do klienta client.println("HTTP/1.1 200 OK"); client.println("Content-type:text/html"); client.println(); client.println("Komenda otrzymana"); client.println(); break; } else if (c != '\r') { currentLine += c; } } yield(); // Dodanie yield() w celu uniknięcia resetowania przez watchdog } client.stop(); Serial.println("Client Disconnected"); } delay(10); // Dodanie niewielkiego opóźnienia, aby odciążyć procesor }
Witam serdecznie, Borykam się z dziwnym dla mnie problemem, otóż zbudowałem sobie pojazd rc składający się z czterech silników, arduino, nakładki od iduino i modułu esp32 wroom do komunikacji wifi z telefonem. Do sterowania użyłem aplikacji z google play, który wysyła 5 zapytań GET; "GET /?State=F", "GET /?State=B","GET /?State=L","GET /?State=R", "GET /?State=S". Kolejno są to : przód, tył, lewo, prawo i stop. Sygnały schodzą na esp jak i są przekazywane na arduino dopóki układ jest zasilany z kabla usb. Niestety gdy uruchomię z zasilania bateryjnego, to silniki na sygnały nie reaguję, podobnie jest gdy obwód jest zasilany z kabla usb, a przełączę przycisk zasilania bateryjnego, to wywala komunikację z komputerem. Kod sterujący silnikami w zależności od otrzymanej komendy, a pod nim kod z esp32, który odbiera sygnały z telefonu i przekazuje na arduino. Wydaje mi się, że jest kwestia zasilania, ale nie dam sobie ręki uciąć, może ktoś miał podobny problem? Z góry dziękuję za odpowiedzi. #include <AFMotor.h> // Inicjalizacja motor shield AF_DCMotor motor1(1); // Motor 1 podłączony do kanału M1 AF_DCMotor motor2(2); // Motor 2 podłączony do kanału M2 AF_DCMotor motor3(3); // Motor 3 podłączony do kanału M3 AF_DCMotor motor4(4); // Motor 4 podłączony do kanału M4 void setup() { Serial.begin(9600); // Komunikacja z ESP32 Serial.println("Arduino is ready to receive commands"); } void loop() { if (Serial.available()) { char command = Serial.read(); Serial.print("Received command: "); Serial.println(command); switch (command) { case 'F': // Ruch do przodu Serial.println("Moving forward"); motor1.setSpeed(255); // Maksymalna prędkość motor1.run(FORWARD); motor2.setSpeed(255); motor2.run(FORWARD); motor3.setSpeed(255); motor3.run(FORWARD); motor4.setSpeed(255); motor4.run(FORWARD); break; case 'B': // Ruch do tyłu Serial.println("Moving backward"); motor1.setSpeed(255); motor1.run(BACKWARD); motor2.setSpeed(255); motor2.run(BACKWARD); motor3.setSpeed(255); motor3.run(BACKWARD); motor4.setSpeed(255); motor4.run(BACKWARD); break; case 'R': // Skręt w prawo Serial.println("Turning right"); motor1.setSpeed(255); motor1.run(FORWARD); motor2.setSpeed(255); motor2.run(BACKWARD); motor3.setSpeed(255); motor3.run(FORWARD); motor4.setSpeed(255); motor4.run(BACKWARD); break; case 'L': // Skręt w lewo Serial.println("Turning left"); motor1.setSpeed(255); motor1.run(BACKWARD); motor2.setSpeed(255); motor2.run(FORWARD); motor3.setSpeed(255); motor3.run(BACKWARD); motor4.setSpeed(255); motor4.run(FORWARD); break; case 'S': // Stop Serial.println("Stopping"); motor1.setSpeed(0); motor1.run(RELEASE); motor2.setSpeed(0); motor2.run(RELEASE); motor3.setSpeed(0); motor3.run(RELEASE); motor4.setSpeed(0); motor4.run(RELEASE); break; default: Serial.println("Unknown command"); break; } } } #include <WiFi.h> // Nazwa i hasło sieci Wi-Fi const char* ssid = "RC_CONNECTION"; const char* password = "12345678"; // Inicjalizacja serwera WiFiServer server(80); // Piny dla Serial1 const int RX_PIN = 16; const int TX_PIN = 17; void setup() { Serial.begin(115200); Serial1.begin(9600, SERIAL_8N1, RX_PIN, TX_PIN); // Używamy Serial1 do komunikacji z Arduino // Ustawienie ESP32 jako Access Point WiFi.softAP(ssid, password); Serial.println("Access Point utworzony:"); Serial.print("SSID: "); Serial.println(ssid); Serial.print("IP address: "); Serial.println(WiFi.softAPIP()); // Uruchomienie serwera server.begin(); } void loop() { WiFiClient client = server.available(); // Sprawdzenie, czy są klienci if (client) { Serial.println("New connection"); String currentLine = ""; // do trzymania danych z klienta while (client.connected()) { if (client.available()) { char c = client.read(); Serial.write(c); // Wysyła komendę do komputera przez Serial if (c == '\n') { // Przetwarzanie żądania GET Serial.println("Processing request:"); Serial.println(currentLine); // Wysłanie komendy do Arduino przez Serial1 if (currentLine.indexOf("GET /?State=F") >= 0) { Serial1.println("F"); } else if (currentLine.indexOf("GET /?State=B") >= 0) { Serial1.println("B"); } else if (currentLine.indexOf("GET /?State=R") >= 0) { Serial1.println("R"); } else if (currentLine.indexOf("GET /?State=L") >= 0) { Serial1.println("L"); } else if (currentLine.indexOf("GET /?State=S") >= 0) { Serial1.println("S"); } // Wysłanie odpowiedzi do klienta client.println("HTTP/1.1 200 OK"); client.println("Content-type:text/html"); client.println(); client.println("Komenda otrzymana"); client.println(); break; } else if (c != '\r') { currentLine += c; } } yield(); // Dodanie yield() w celu uniknięcia resetowania przez watchdog } client.stop(); Serial.println("Client Disconnected"); } delay(10); // Dodanie niewielkiego opóźnienia, aby odciążyć procesor }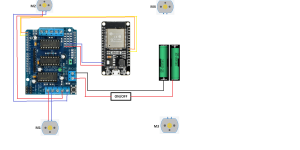
-

UNO + Motorshield rev.3 Kontrola silnika DC z przycisku
Cookie_Monster opublikował temat w Arduino i ESP
Witam; Buduje urządzenie które ma za zadanie pobrać (wciągnąć) element na tackę, poprzez aktywowanie mikro przełącznika przy wprowadzaniu elementu. Posiadam Arduino Uno, Motor Shield Rev.3, mikroprzełącznik NO/COM/NC, silnik 12VDC. Proszę o pomoc w dopisaniu lub zmianę w kodzie, aby silnik pobierał element tylko w czasie wciśnięcia przycisku, poniżej przesyłam mój kod pętli. Z góry dziękuję za pomoc const int MotorPinA = 12; const int SpeedPinA = 3; const int BrakePinA = 9; const int Pobranie = HIGH; const int Zwrot = LOW; void setup() { pinMode(MotorPinA,OUTPUT); pinMode(SpeedPinA,OUTPUT); pinMode(BrakePinA,OUTPUT); Serial.begin(9600); } void loop() { digitalWrite(MotorPinA, Pobranie);//kierunek obrotu silnika Serial.println("Pobranie"); analogWrite(SpeedPinA, 100);//prędkość silnika od 0 do 255 Serial.println("szybkość 100"); delay(1000);//czas pracy silnika digitalWrite(BrakePinA,HIGH);//rozpoczęcie hamowania Serial.println("Hamowanie"); delay(500);//przerwa digitalWrite(BrakePinA,LOW);//zatrzymanie hamowania }
