Przeszukaj forum
Pokazywanie wyników dla tagów 'Synteza mowy'.
Znaleziono 1 wynik
-
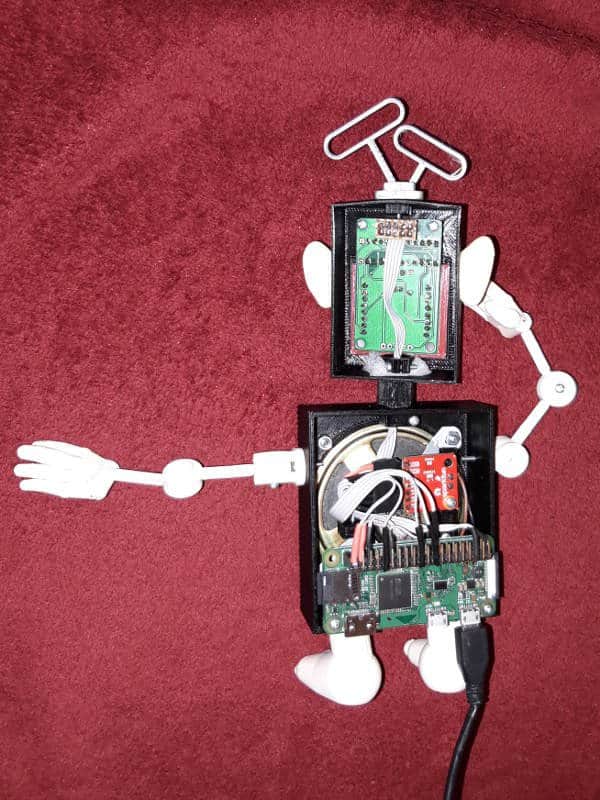
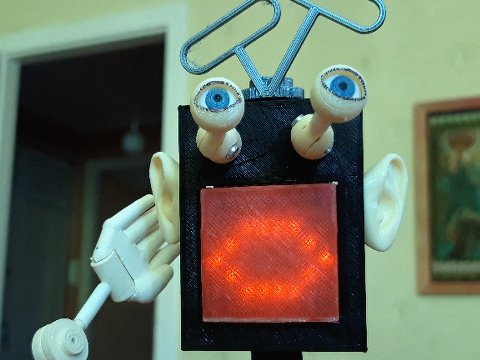
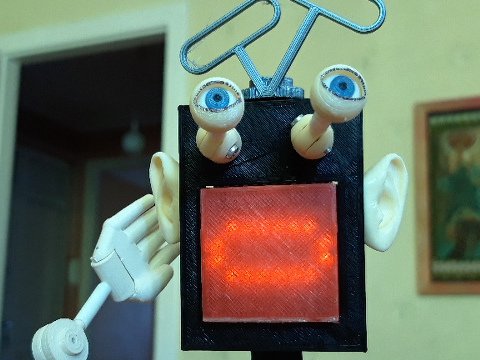
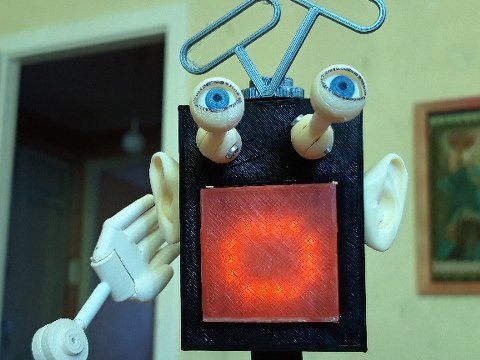
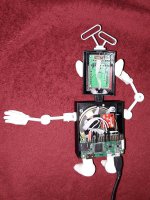
Już słyszę głosy: O, staremu ethanakowi coś się chyba pokręciło... Post jest o jakimś Kedrigernie w dziale DIY - a na zdjęciu mamy coś przypominającego robota z dumnym napisem "Ciapek"... Spieszę z wyjaśnieniami. To nie pomyłka. Post jest na temat serwera mowy Kedrigern, a Ciapek to żaden robot. Po prostu dość trudno zrobić zdjęcie programu, poza tym wypadałoby raczej pokazać ów program w działaniu - a ten wymaga jednak czegoś co będzie gadać (czyli jakiejś bardziej fikuśnej obudowy na głośnik). A ponieważ ostatnio zapatrzyłem się w rysunki Daniela Mroza... cóż, Ciapek z ludzkimi dłońmi, stopami i uszkami wyszedł tak jak wyszedł Zacznę możę od opisu elektroniki (jako że jest to najprostsze, a użytkownik może sobie ją skomponować z zupełnie innych elementów). Sercem całego układu jest Raspberry Pi. Można zastosować dowolny model (chociaż ze starymi, krótkimi GPIO mogą być lekkie problemy), ja użyłem w swoim egzemplarzu Raspberry Pi Zero W. Oprócz tego potzebny jest jakikolwiek układ odtwarzania dźwięku. "Duże" (pełnpowymiarowe) malinki jak popularny 3B+ mają już wyprowadzone wyjście audio, potrzebny jest tylko jakiś niewielki wzmacniacz. Dla wersji Zero potrzebny jest jednak układ zewnętrzny. Prawdopodobnie doskonale spisałby się opisywany ostatnio moduł z wyjściem audio do Raspberry Pi Zero, ja zastosowałem jednak moduł i2s. Jest on dość wygodny w użyciu jako że zawiera w sobie wzmacniacz mono o całkiem sporej (do 3 W) mocy, poza tym początkujący elektronicy nie muszą się martwić o jakieś dziwne masy audio, filtrowane zasilania i tym podobne dziwactwa interesujące tylko "analogowców" - moduł podłącza się pięcioma przewodami do malinki, z drugiej strony dwoma do głośnika i już gra Ponieważ nasz "robocik" musi potrafić poruszać ustami, zastosowałem najprostsze (i najprawdopodobniej najtańsze) rozwiązanie - czyli matrycę LED 8x8 ze sterownikiem, na której rysowane będą kształty ust. Od razu uprzedzę pytanie: owszem, próbowałem zrobić bardziej skomplikowany mechanizm używający serw. Niestety - oprócz trudności mechanicznych (te są do przezwyciężenia) natrafiłem na rzecz, której nie da się przeskoczyć: prędkość serwa. Typowe serwo potrzebuje 0.1 sekundy na przekręcenie orczyka o 60° - a nawet zakładając, że owe 60° wystarczy (w co osobiście wątpię), jest to co najmniej dwa razy za wolno (przy czym owe "dwa" mogłoby się w rzeczywistych układach rozrosnąć do trzech czy czterech). Będę jeszcze próbować rozwiązania z solenoidami - jeśli mi się uda to opublikuję wyniki. Ale może w międzyczasie ktoś inny napisze moduł "solenoid"? Zresztą - chciałem, aby każdy mógł sobie w domu wypróbować Kedrigerna ponosząc jak najmniejsze koszty, a opisywany układ można (mając RPi z wyjściem audio) zmontować kosztem klikunastu złotych (matryca) bez żadnych płytek - po prostu łącząc matrycę przewodami z GPIO malinki. Jako głośnika użyłem leżącego gdzieś w szufladzie zakurzonego głośniczka od starego telefonu z sekretarką, pasować jednak będzie dowolny pod warunkiem dopasowania mocy głośnika do posiadanego wzmacniacza. I to cała wielce skomplikowana elektronika. Jak widać na zdjęciu - nie ma tam nic skomplikowanego. Przejdę więc do opisu programu. Kilka lat temu udało mi się zmusić Mbrolę do w miarę prawidłowego gadania po polsku (do tego stopnia, że można ją było wykorzystać np. do tworzenia audiobooków). System TTS Milena (tak się nazywa ten "zmuszacz" do Mbroli - czyli bardziej fachowo NLP) bardzo dobrze sprawdził się na pecetowym Linuksie, wersja na Windows była raczej ciekawostką ale również działała - postanowiłem więc przystosować ją do malinki. Po przezwyciężeniu pewnych trudności z kompilacją (np. "char" dla architerktury Intel to w GCC domyślnie signed, w ARM z jakichś przyczyn unsigned) okazało się, że co prawda Milena działa, ale "rozruch" ma straszliwie powolny. Nic dziwnego - pliki tekstowe słowników wymowy i translacji fonetycznej muszą być kompilowane przy załadowaniu programu, a malinka ze swoją wolniutką kartą pamięci i nieszczególnie silnym procesorkiem potrzebuje zbyt dużo czasu, zanim wydobędzie z siebie jakieś zdanie. Postanowiłem więc zrobić inaczej: serwer wczytuje wszystkie pliki raz przy starcie systemu, a prosty program klienta przekazuje mu tylko treść komunikatów. Takie rozwiązanie ma również inne zalety: uruchomiony na sockecie TCP serwer może być na zupełnie innej fizycznej maszynie niż klient. I w ten sposób powstał program Kedrigern (nazwany na cześć pewnego czarodzieja, który postanowił odczarować księżniczkę z zaklęcia odbierającego głos). Jak mi to wyszło - oceńcie sami. Oto filmik ukazujący Kedrigerna w działaniu: Nie będę tu rozpisywał się o wszystkich zasadach działania i możliwościach Kedrigerna i Mileny (to w końcu ma byc post na forum a nie książka z dokumentacją), zacznę więc od instalacji Kedrigerna na malince. Wszystkie konieczne komponenty (z wyjątkiem głosu pl1) są w załączonym pliku tgz. Rozpakujmy go w dowolnym katalogu (np. w głównym katalogu użytkownika malinki) i instalujemy mbrolę wraz z polskim głosem: sudo dpkg -i mbrola3.0.1h_armhf.deb sudo apt install mbrola-pl1 Teraz możemy zainstalować Milenę. I tu uwaga: jeśli ktoś miał starszą wersję Mileny niż 0.2.92 musi ją przeinstalować na tę właśnie wersję - inaczej nie będzie działać moduł ruchu ust Kedrigerna! sudo dpkg -i milena*.deb Po zainstalowaniu wszystkiego powinno działać już polecenie milena_say, czyli musimy wypróbować: milena_say dzień dobry kolego I znów uwaga: jeśli wyjściem audio jest HDMI, polecenie może nie działać prawidłowo! Należy spróbować dodać parametr -d opóżniający generację mowy do czasu "załapania" HDMI, czyli najprościej: milena_say -d 2000 dzień dobry kolego Niestety, przy użyciu wyjścia HDMI mogą pojawić się problemy z późniejszym działaniem Kedrigerna, ale po pierwsze nie jest to miejsce na omawianie problemów z audio, po drugie wcale nie czuję się mistrzem w tym zakresie i prawdopodobnie ktoś tu wie lepiej ode mnie jak tym problemom zaradzić. W każdym razie mając uruchomiona Milenę i Mbrolę możemy przystąpić do instalacji Kedrigerna. Zaczynamy od instalacji serwera, czyli sudo dpkg -i kedrigern_0.2.0-1_armhf.deb Jeśli mamy podłąćzoną matrycę LED (8x8, MAX7219) możemy użyć jej jako wyświetlacz ust: sudo dpkg -i kedrigern-matrix_0.2.0-1_armhf.deb No i oczywiście coś co pozwoli nam korzystać z serwera, czyli: sudo dpkg -i libkedrigern_0.1.2-1_armhf.deb Teraz możemy sprawdzić, co potrafi nasz serwer: kedrigern -h lub (jeśli mamy zainstalowany moduł matrix) kedrigern -M matrix -h W odpowiedzi dostaniemy wykaz opcji, z którymi możemy uruchomić serwer. Aby je przetestować, należy otworzyć drugi terminal; w pierwszym uruchamiamy serwer poleceniem "kedrigern" z różnymi opcjami, w drugim testujemy poleceniem kdr-say. Po ustaleniu opcji należy zedytować plik /etc/default/kedrigern i w nim ustawić domyślne parametry. Po przetestowaniu poleceniem kedrigern -C /etc/default/kedrigern możemy już uruchomić nasz serwer w tle: sudo systemctl start kedrigern Jeśli chcemy, aby serwer startował od razu przy starcie systemu, należy wydać polecenie: sudo systemctl enable kedrigern Do komunikacji z serwerem służą polecenia kdr-say, kdr-stop i kdr-speaking. Moduł matrix pozwala na wyświetlanie ust zsynchronizowane z głosem syntezatora. Oto przykładowe obrazy ust dla różnych fonemów: Fonem A Fonem I Fonem O Fonem U Fonemy M, P i B Wybrałem do pokazania kilka najbardziej charakterystycznych kształtów. Jeśli komuś nie odpowiadają stworzone przeze mnie kształty może w prosty sposób dorobić własne lub poprawić moje na bazie pliku /usr/share/kedrigern/demo.shape i podłączyć go do Kedrigerna, np. za pomocą opcji "-m matrix:shape" lub wprowadzając odpowiednie zmiany w pliku konfiguracyjnym. Protokół komunikacyjny jest bardzo prosty. Nie wnikając w szczegóły - załączony moduł w Pythonie (działa w wersji 2 i 3 Pythona) pozwala na sterowanie serwerem, a jednocześnie stanowi przykład sposobu komunikacji. I to wszystko... A nie, nie wszystko. Bo zaraz ktoś powie że to tylko zabawka, że komu potrzebne gadające roboty... Przede wszystkim: Kedrigern może generować komunikaty diagnostyczne w czasie testowania/programowania robota. Jakie to ma znacze nie nie muszę chyba mówić nikomu, kto choć raz ustawiał np. regulatory silników czy zakres ruchu serw w warunkach polowych. Poza robotyką może być bardzo dobrym rozwiązaniem do urządzeń typu headless - ja np. stosuję podobne (poprzednika Kedrigerna) rozwiązanie do obsługi sterownika pieca CO (podanie np. godzin nieobecności w mieszkaniu) czy jako wygodnego interfejsu do wpisywania wyników pomiaru ciśnienia krwi i poziomu cukru z małej przenośnej klawiaturki. A to już nie są zabawki A w ogóle przypominam, że Roomba też gada (tyle że Ciapek ładniej) Zdaję sobie sprawę z tego, że opis jest bardzo pobieżny. Z chęcią odpowiem na wszystkie pytania - o ile kogoś to będzie interesować... W każdym razie wypróbowanie Kedrigerna nawet bez modułu ust posiadacza RPi z wyjściem audio nic nie kosztuje, a może się przyda? Kody źródłowe Mileny i Kedrigerna są dostępne na stronie http://milena.polip.com A, i ostatnie wyjaśnienie: Ciapek to mały troll, wychowanek czarodzieja Kedrigerna w książce Johna Morressy'ego "Głos dla księżniczki". Nawet trochę podobny Przy okazji: @Treker, czemu pliki zip są cacy a tgz są be? kedrigern.zip pykedrigern.zip






- 20 odpowiedzi
-
- 14
-

-
- Animatronika
- Raspberry Pi
- (i 1 więcej)