Przeszukaj forum
Pokazywanie wyników dla tagów 'Xiao S3 Sense'.
Znaleziono 1 wynik
-
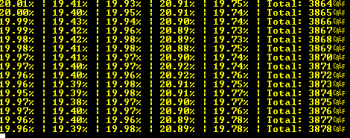
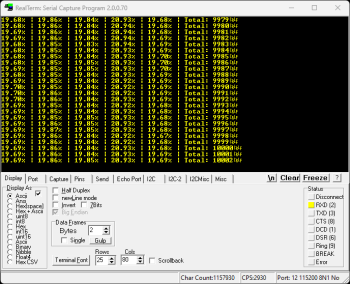
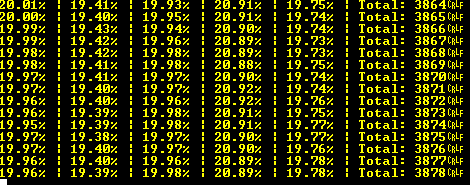
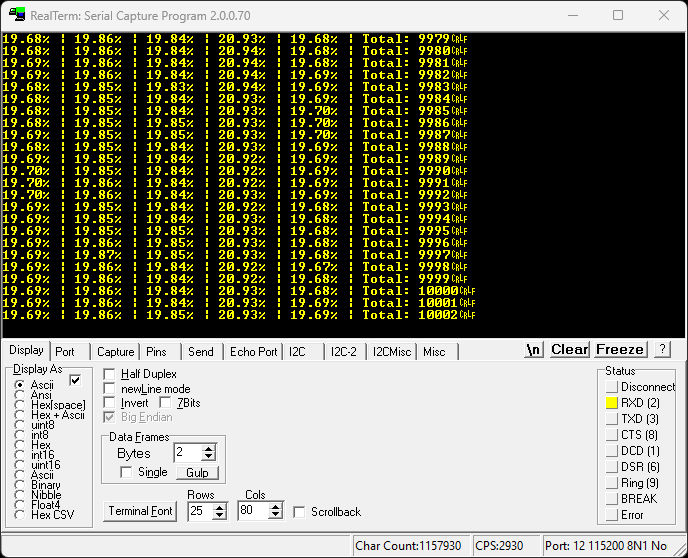
Wstęp Na fali wątku o grze bingo powstała wielka dyskusja o losowości i generatorach liczb losowych i pseudolosowych (jak rand() w C). Do tego YouTube zaczął mi polecać filmiki o liczbach losowych i uznałem to za znak, że warto zbudować własny generator liczb (prawie) losowych. W artykule wykorzystałem moduły otrzymane w ramach współpracy z Botlandem. Może nie używałbym go do generowania kodów odpalających głowice atomowe, ale do prostych gier na ESP32 się jak najbardziej nadaje. Rozkład prawdopodobieństwa po 3878 losowaniach liczb z zakresu 0 do 4. Elektronika i zasada działania Urządzenie jest niezwykle skomplikowane - jest to płytka Xiao ESP32 S3 Sense i przewód USB-C. Raczej każdy da radę zbudować (nawet nie potrzeba banana, chociaż wersja z bananem generuje lepsze wyniki niż ten generator). Xiao ESP32 S3 Sense wraz z zasłoniętą kamerą Założeniem systemu jest to, iż kamera posiada szum własny (jak dobrze, że fizyka nas nie lubi i utrudnia nam życie, czasem można to wykorzystać dla własnych potrzeb). Tj. kiedy zasłonimy obiektyw np. taśmą izolacyjną (czerwona zwiększa prędkość działania urządzenia, ale czarna generuje szerszy zakres losowości) kamera generuje obraz, który nie jest całkowicie czarny tylko zawiera jaśniejsze artefakty. Obraz z zasłoniętej kamery Tym samym możemy wykorzystać dane z czujnika i nieco matematyki, by zamienić te dane na liczbę. Problem z stałymi częściami obrazu Jeżeli kiedykolwiek zasłanialiście obiektyw kamery zauważyliście, że część obrazu się nie zmienia (zawsze wygląda tak samo). Tak również jest w naszym przypadku, a przy liczbach losowych wprowadzałoby to zaburzenia rozkładu prawdopodobieństwa (można też powiedzieć 'bias'). Możemy łatwo to obejść używając operacji XOR do porównania dwóch ramek pobranych z kamery by usunąć składowe stałe. Konfiguracja PlatformIO Cały projekt został zaimplementowany z użyciem PlatformIO i frameworka Arduino (by sobie ułatwić życie). Jako, że płytka posiada PSRAM został on aktywowany (UWAGA: profil PlatformIO pod płytkę Xiao jest błędny i ma wpisane, że PSRAM używa QSPI, gdy w rzeczywistości jest to OSPI). [env:seeed_xiao_esp32s3] platform = espressif32 board = seeed_xiao_esp32s3 framework = arduino build_flags = -DARDUINO_USB_CDC_ON_BOOT=1 -DBOARD_HAS_PSRAM -DPREFER_PSRAM -mfix-esp32-psram-cache-issue board_build.arduino.memory_type = qio_opi Konfiguracja płytki z PSRAM Kod programu #include <Arduino.h> #include "esp_camera.h" #define PWDN_GPIO_NUM (-1) #define RESET_GPIO_NUM (-1) #define XCLK_GPIO_NUM 10 #define SIOD_GPIO_NUM 40 #define SIOC_GPIO_NUM 39 #define Y9_GPIO_NUM 48 #define Y8_GPIO_NUM 11 #define Y7_GPIO_NUM 12 #define Y6_GPIO_NUM 14 #define Y5_GPIO_NUM 16 #define Y4_GPIO_NUM 18 #define Y3_GPIO_NUM 17 #define Y2_GPIO_NUM 15 #define VSYNC_GPIO_NUM 38 #define HREF_GPIO_NUM 47 #define PCLK_GPIO_NUM 13 bool camera_ready = false; // Pozwala sprawdzić czy kamera jest gotowa #define N_MAX_VALUE 5 // Liczba wiaderek (maksymalna liczba do wylosowania) uint32_t sampleCounts[N_MAX_VALUE]; // Liczba losowań konkretnej liczby uint64_t samplesCount = 0; // Liczba łącznych losowań void setup() { delay(2000); Serial.begin(115200); while (!Serial) // Poczekaj na uruchomienie portu szeregowego { Serial.print("."); } Serial.println("Serial port ready!"); // Konfiguracja kamery dla Xiao ESP32-S3 Sense camera_config_t config; // IO config.ledc_channel = LEDC_CHANNEL_0; config.ledc_timer = LEDC_TIMER_0; config.pin_d0 = Y2_GPIO_NUM; config.pin_d1 = Y3_GPIO_NUM; config.pin_d2 = Y4_GPIO_NUM; config.pin_d3 = Y5_GPIO_NUM; config.pin_d4 = Y6_GPIO_NUM; config.pin_d5 = Y7_GPIO_NUM; config.pin_d6 = Y8_GPIO_NUM; config.pin_d7 = Y9_GPIO_NUM; config.pin_xclk = XCLK_GPIO_NUM; config.pin_pclk = PCLK_GPIO_NUM; config.pin_vsync = VSYNC_GPIO_NUM; config.pin_href = HREF_GPIO_NUM; config.pin_sccb_sda = SIOD_GPIO_NUM; config.pin_sccb_scl = SIOC_GPIO_NUM; config.pin_pwdn = PWDN_GPIO_NUM; config.pin_reset = RESET_GPIO_NUM; config.xclk_freq_hz = 20000000; // Częstotliwość komunikacji config.frame_size = FRAMESIZE_240X240; // Pakiet danych o małym rozmiarze (szybkie liczenie) config.pixel_format = PIXFORMAT_GRAYSCALE; // Dla łatwiejszej obróbki config.grab_mode = CAMERA_GRAB_LATEST; // Dla lepszej losowości config.fb_location = CAMERA_FB_IN_DRAM; // Można zmienić też na CAMERA_FB_IN_PSRAM, ale jest wolniejszy :( config.fb_count = 2; // Inicjalizacja kamery const esp_err_t err = esp_camera_init(&config); if (err != ESP_OK) { Serial.printf("Camera init failed with error 0x%x", err); return; } // Jesteśmy gotowi do działania Serial.println("Camera ready!"); camera_ready = true; } // Generuje losową liczbę używając kamery uint32_t generate_random_number() { // Zrób dwa "zdjęcia" kamerą i upewnij się, że są poprawne camera_fb_t* fb0 = esp_camera_fb_get(); camera_fb_t* fb1 = esp_camera_fb_get(); if (!fb0 || !fb1) { Serial.println("Failed to get camera frame buffer"); // Błąd odczytu kamery return 0xFFFFFFFF; } // Zmienna zawierająca rezultat losowania uint32_t result = 1; // Oblicz losową liczbę uwzględniając cały bufor z oveflowem for (uint32_t index = 0; index <= fb0->len; index++) { // Operacja XOR automatycznie usuwa wszystkie powtarzające się fragmenty pobrane przez kamerę, // które występują najczęściej na rogach. result += fb0->buf[index] ^ fb1->buf[index]; } // Zwróć bufory do kamery esp_camera_fb_return(fb0); esp_camera_fb_return(fb1); return result; } void loop() { // Poczekaj aż kamera będzie gotowa if (camera_ready) { // Wylosuj liczbę i dodaj do odpowiedniego wiaderka const uint32_t rnd = generate_random_number(); sampleCounts[rnd % N_MAX_VALUE]++; samplesCount++; // Policz rozkład liczb w wiaderkach for (int n = 0; n < N_MAX_VALUE; n++) { if (n > 0) Serial.print(" | "); Serial.printf("%.2f", sampleCounts[n] / (float) samplesCount * 100); Serial.print("%"); } // Zakończ linię wyświetlając liczbę próbek Serial.printf(" | Total: %llu\r\n", samplesCount); } } Najbardziej istotny jest fragment losowania, reszta to tylko otoczka pozwalająca przetestować działanie z wykorzystaniem monitora portu szeregowego. Na początku algorytm losowania liczby pobiera dwa bufory z kamery (można nazwać to potocznie zdjęciami) i upewnia się, że są one prawidłowe: // Zrób dwa "zdjęcia" kamerą i upewnij się, że są poprawne camera_fb_t* fb0 = esp_camera_fb_get(); camera_fb_t* fb1 = esp_camera_fb_get(); if (!fb0 || !fb1) { Serial.println("Failed to get camera frame buffer"); // Błąd odczytu kamery return 0xFFFFFFFF; } Kolejnym etapem jest zsumowanie różnic pomiędzy obecną, a poprzednią klatką (i tutaj raczej nie jest to najlepszy algorytm, ale na ten moment nie mam lepszego pomysłu, który byłby akceptowalnie wydajny). Obecna wersja jest też dość mało losowa (prawidłowo powinienem sumować wartości pikseli, które się zmieniły, a nie różnice między pikselami w ramkach, ale wtedy wymagałoby to kosztownej operacji porównania, która nie zostałaby skompensowana przez branch prediction, gdyż nie byłoby po niej dostatecznie dużo prostych operacji zajmujących czas procesora gdy ten oblicza porównanie w tle). // Zmienna zawierająca rezultat losowania uint32_t result = 1; // Oblicz losową liczbę uwzględniając cały bufor z oveflowem for (uint32_t index = 0; index <= fb0->len; index++) { // Operacja XOR automatycznie usuwa wszystkie powtarzające się fragmenty pobrane przez kamerę, // które występują najczęściej na rogach. result += fb0->buf[index] ^ fb1->buf[index]; } A na koniec zwalniamy bufory do pobrania kolejnych zdjęć przez kamerę. Bez tego program wylosuje tylko jedną liczbę i zacznie wyrzucać błędy. // Zwróć bufory do kamery esp_camera_fb_return(fb0); esp_camera_fb_return(fb1); Rozkład prawdopodobieństwa Algorytm posiada bardzo dobry rozkład prawdopodobieństwa dla 10 000 sampli i do 10 liczb w zestawieniu. W przypadku 5 liczb i 10 000 sampli rozkład jest wysoce zbliżony do równomiernego. Rozkład prawdopodobieństwa dla 5 liczb 1-1.5pp odchylenia między wartościami jest akceptowalne jak na tak prosty system, gdyż może ono wynikać z niedokładnego zasłonięcia obiektywu, nieuwzględnionych parametrów fizycznych, a szczególnie tego, że algorytm jest nie do końca idealny. Ten ostatni czynnik bardzo mocno wpływa na maksymalną wartość, którą możemy losować (około 10), a zwiększenie zakresu wymaga przeróbki algorytmu obliczającego wynik tak, by uwzględnić w nim wartości pikseli odczytane przez kamerę. Ale do prostych losowań prawda-fałsz czy D6 algorytm nadaje się w sam raz. W artykule wykorzystałem moduły otrzymane w ramach współpracy z Botlandem.