Chechli
-
Zawartość
140 -
Rejestracja
-
Ostatnio
-
Wygrane dni
2
Osiągnięcia użytkownika Chechli
")





-
Wrzucam zmiany - info o braku kamerki+tworzenie katalogu Nagrania (sam kod na razie w załaczniku, zeby serwera nie zasmiecać). Załącznik na początku tematu.
-
Pod Windowsem nie musisz uzywać Phonona, wystarczy QSound, oparty na PlaySound z windows.h - jak sie nie mylę to jest tak zrobione u mnie w wersji na windę. Jedynym dźwiekiem jest gong, można dla potrzeb widzów dodać dźwiek końca odliczania 5 sekund, dodawać wiecej nie ma sensu - przy regularnej sekwencji piknięć zawodnicy z wyczuciem rytmu będą mieli przewagę. W wolnym czasie zajme sie tym folderem i info o braku kamery.
-
Spróbujcie w folderze z plikiem *.exe dodac folder Nagrania - tak jak w folderze release w wersjach w temacie - folder musi istnieć. A co do zerowego tempa, to nie weim czemu, ale może coś z tym statycznym OpenCV - program działał na wszytskich kompach z dllkami gdzie byl odpalany. A może by sprobować tak: zainstalować sobie Qtcreatora (powinien mieć wszelkie dllki, więc jak komus brakuje to sobie skopiuje do folderu progrmu) a te 4 od opencv (cv, cvaux, cxcore, highgui) skopiować z załącznika? Btw, zawsze jak piszecie że nie działa, to piszcie jak to sie objawia. ^ tak, bez kamery po prostu sie nie uruchamia, i tak nie da sie wtedy korzystać, wiec nie widziałem sensu żeby sie przed tym specjalnie zabezpieczać
-
Dajcie znać, jak komuś zadziała - jak to będzie ostateczna wersja to wrzucę do tematu, żeby nie trzeba było szukać. Dzieki kling za pomoc
-
Mi sie skompilował pod windowsem i działał Ale jakbys mógl go skompilowac statycznie, to będę wdzięczny, jak i pewnie kilku innych forumowiczów. Licencja dla programów kompilowanych statycznie w QtCreatorze to GPL, na szczegółach licencji sie nie znam ale jak widać ten program też jest generalnie publiczny
-
Już nie ma bin, cała jego zawartość jest w release (jak koniecznie chcesz możesz skopiować pliki *.dll do utorzonego przez Ciebie katalogu bin w folderze głównym i realizować warianty b lub c). Jak dokładniej Ci nie działa, coś wyskakuje, jaki masz system, ilu bitowy?
-
Też tak myślałem, ale coś mi nie działało Pewnie zapomniałem, że wykonywalny jest w podfolderze release. Juz uzupełniam o najprostszą metodę.
-
Dodałem wszystkie niezbędne dllki, opis w temacie, powinno już działać, jak jeszcze jakiejś dllki by brakowało to piszcie, wrzucę tutaj od siebie bo z neta lepiej nie ściągać podobno. Nie wiem jak będzie sie miała sprawa z systemamami 64-bitowymi, nie znam sie szczególnie na in formatyce, ale jak macie błędy to je opisujcie, bo na podstawie "nie działa" ciężko pomóc.
-
Rzeczywiście, miejscami się zamotałem w opisie, ale robiłem to po powrocie z roboty i dzisiaj na spokojnie trochę poprwiłem. Co do odpalania programu to na linuxie powinno po prostu działać po rozpakowaniu, na windowsie trzeba skompilować, ale w najbliższym czasie postaram sie i tu dorobić. ProeXtreme, jeśli asz na myśli zdalny start jako dostraczany przez organizatorów moduł liczący te 5 sekund to nie zamierzamy - program powinien całkowicie wykrywać falstarty, jak będzie trzeba dokładności większej niż 50ms to wystarczy podłączyc szybszą kamerę Poza tym takie moduły by kosztowały, albo każde zawody musiały by mieć swoje albo trzeba by je sobie pożyczać, a program każdy chętny może odpalić, kamer teraz dostatek.
-
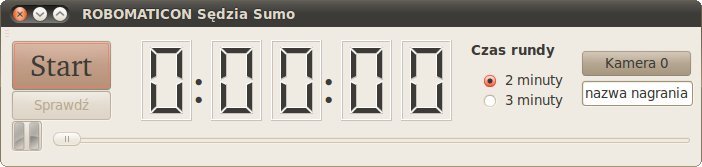
Projekt jest jedną z prób rozwiązania problemu falstartów w zawodach robotów, z dedykacją dla sumo wszelkiej kategorii wagowej. Jego pierwsza wersja została wykorzystana na Robomaticonie 2012 i działała bez zarzutu, jednak obsługa z punktu widzenia sędziego nie była zbyt dopracowana, co w wolnym wakacyjnym czasie udało mi się naprawić. Jeżeli stwierdzicie, że jeszcze jakaś funkcja byłaby bardzo przydatna, to piszcie, jak sie uda to zaimplementuję - sam zresztą mam jeszcze kilka pomysłów, kilka podsunął kolega ze studiów, ale to wszystko poczeka pewnie na kilka kolejnych deszczowych dni No ale do rzeczy, co ten program potrafi. W załącznikach jest już skompilowana wersja pod Windowsa Sędziowanie oparte jest na widzeniu maszynowym (wystarczy podpiąć dowolną kamerkę pod usb) i OpenCV (wersja 2.3.1), interfejs Qt, dzwięk phonon (nie wiem jak z wieloplatrofmowościa tej ostatniej biblioteki, reszta na pewno niezależna od systemu), kompilowane pod ubuntu 10.04. Program wspomaga pracę sędziego poprzez oznaczanie obszarów ruchu, nie zajmuje sie oceną ktory z robotów dokonał falstartu. Obsługa jest następująca: - sędzia klika przycisk Start, - rozlega sie pojedyńczy dźwięk gongu i wraz z jego początkiem zaczyna sie odliczanie 5 sekund do rozpoczęcia walki (nagranie walki zapisywane jest w odpowiednim folderze, pod nazwą wpisaną w widocznym na screenie polu tekstowym), - w połowie czasu odliczania rozpoczyna sie analiza obrazu - wcześniej zawodnicy wciskają przyciski startowe i zabieraja ręce, co niepotrzebnie zamazywało by wyniki, a ewentualne grube falstary i tak widac na nagraniu (gołym okiem zreszta też ), - podczas analizy obrazu podświetlane na czerwono są obszary ruchu, a ponieważ nic nie powinno sie ruszać to podświetlane są falstarty, - po upływie 5 sekund odliczania sędziemu wyswietla sie obraz podsumowujący wykryte potencjalne falstarty (potencjalne, bo ruch publiczności w tle też zostanie podświetlony), może on od razu kliknąć przycisk Ok (walka jest kontynuowana) lub Sprawdź (w przypadku podejrzenia falstartu), - Sprawdź otwiera nagranie odliczania, uaktywniają sie przyciski play/pause i suwak przewijania, na nagraniu wyswietla sie czas, wszystko to umożliwia sprawdzenie wszelkich interesujących szczegółów, np. który z robotów pierwszy popełnił falstart), - sędzia kończy walke klikając Falstart lub nie stwierdza go i klika Ok (walka jest kontynuowana), - sędzia moze zakończyc walkę, klikając Stop (jeżeli którys z robotów wygra przed czasem), lub odczekać do końca rundy (do wyboru rundy 2 i 3 minutowe, radiobox widoczny na screenie), - i lecimy od nowa Jakby ktoś pytał to przycisk kamera służy do wyboru kamery, indeksowane sa one w OpenCv od 0, żeby nie komplikować to w programie klikajac przeskakujemy na kolejne od 0 do 3, potem znów na 0 - brzmi zawile, ale ważne jest to, że jeżeli masz więcej niż jedna kamerę i chcesz zmienić źródło obrazu, to klikaj w ten przycisk, jak po 4 razach się nie uda to coś nie działa. Cóz, to chyba by było na tyle, czekam na pytania i sugestie. Jakby komuś udało/nie udało się uruchomić programu pod Windowsem to niech da znać (uruhcamiamy /release/Sumo.exe). Jeżeli wyskoczy błąd braku dllek, to wszystkie potrzebne powinny być w folderze bin załacznika dla Windowsa. Aby z nich skorzystać można: a) po prostu skopiować je do folderu pliku wykonywalnego, czyli release. Poprawiłem strukturę załącznika, więc nic nie trzeba robić, kto sciagnął może sam sobie przenieść z bin do release. Pozostałe sposoby zostawię w temacie, bo działają b) skopiować je do folderu systemowego, np. u mnie C:\Windows\System32, potem można uruchomić ponownie komputer. c) dodać folder do zmiennej systemowej Path: dla Windowsa 7 i chyba wszystkich nowszych Mój komputer -(prawym)->Właściwości->Zaawansowane ustawienia systemu (są po lewej)->Zmienne srodowiskowe (przycisk na dole). Potem wśród zmiennych systemowych szukamy Path i klikamy edytuj. Na końcu dopisujemy adres naszego folederu bin, oddzielony średnikiem od poprzednich, a wiec dopisujemy na końcu: ;C:\Sumo-build-desktop\bin Oczywiście jeżeli to w tym miejscu rozpakowaliśmy program. Jeżeli bedzie brakowało jeszcze jakichs dllek, to dajcie znać - u mnie musza byc, a dllek lepeij nie ściagać z neta. Do skompilowania (jeżeli ktoś chce sam skompilować z kodu, a nie uruchomić) potrzebny jest QtCreator (instalacja prosta, aby otworzyc projekt otwieramy plik *.pro), OpenCV (trudniejsza ale dobrze opisana na stronie tej biblioteki) oraz phonon. Sumo.zip Sumo-build-desktop.zip Sumo_zmiany.zip

-
Dawno się tutaj nie udzielałem Najpierw wyjaśnię tę rozdzielczość 0,01s, bo chociaż na zawodach całkiem sporo byłem koło sumo, to z uczestnikami pogadać czasu nie miałem. Oczywiście jest to rozdzielczość pozorna, kolejne klatki mają czasy różne o 0,03-0,04s (bo 30 fps daje 0,0(3)s). To był pierwszy test tego systemu i rzeczywiście trochę można w nim poprawić - już w trakcie zawodół pomyslałem o sygnale startowym, oprócz tego do poprawy będzie jeszcze kilka szczegółów widocznych z punktu widzenia sędziego. Dzięki za uwagi, postaramy się je wykorzystać jeszcze lepiej od zeszłorocznych
-
[Konkurs] Robomaticon 2011 (Minisumo, MicroMouse, Linefollower, Freestyle)
Chechli odpisał w temacie użytkownika Robomaticon • Wydarzenia
Ponieważ na maila konkursowego, którym się obecnie zajmuję, wpłynęło kilka pytań o kierunek przejazdu FTL to odpowiadam również tutaj (chociaż kwestia ta była już chyba poruszana). Organizatorzy nie określają kierunku przejazdu, najprawdopodobniej będzie sie liczyć suma/średnia przejazdu CW i CCW. -
Ja bym na twoim miejscu zrealizował radę mactra, na uC wszystko działa tak jak wcześniej, tyle, że sygnał stopu jest wysyłany po puszczeniu klawisza, wszystko powino działać i nie wysyłasz niepotrzebnie nadmiaru danych.
-
Przyznam się, że nie przeczytałem całego tego kodu, bo nie czuję ku temu wewnętrznej potrzeby Poza tym jak się pisze własne programy, to nie trzeba się domyślać, co artysta miał na myśli. W tym wypadku sądzę jednak, że jest to zwykła funkcja skalująca wartość zmiennej wyrażoną w procentach, czyli intuicyjną, na wartość potrzebną procesorowi, z zabezpieczeniem przed przekroczeniem wartości maksymalnej. Pewnym drobnym utrudnieniem jest to, że Luko właśnie pije herbatę, ale nie jest na diodzie, i jak ją wypije to bezmyślnie wyrzuci fusy, i w żaden sposób nie dowiemy się, co wyraża MOTOR1_MAX_POWER, jakie przyjmuje wartości, i jak to się ma do procntów w komentarzu przed funkcją. Można mieć tylko nadzieję, ze ta funkcja /** * Ustawia moc silnika 1 wyrażoną w % */ Więc moc silnika jest ustawiona na wartość zadaną parametrem funkcji, a nie 10%.
-
Sumo Challenge 2010 - uwagi, opinie, prośby, sugestie
Chechli odpisał w temacie użytkownika bulibulibu • Wydarzenia
Liczę, że was zaskoczę, ale to czy zadziała, to mój problem Chcę mieć tylko pewność, że jeżeli zadziała, to nie będę miał problemów z regulaminem, gdyż jak pisałem, nie widziałem takich konstrukcji na YT a na zawodach jeszcze nie byłem.