matti007
-
Zawartość
17 -
Rejestracja
-
Ostatnio
-
Wygrane dni
2
Osiągnięcia użytkownika matti007
")





-
no plytki nawet jak na poczatek, a co do dwustronnych to sie nie ma co bac, jak zrobisz pierwsza to pozniej juz same wychodza
-
co do plytek, to powiem Ci ze nie wiem na jakim poziomie jestes w tej kwesti i nie jestem w stanie tego ocenic, ja osobiscie jak robie plytki od projektu do uruchomienia to robie wszystko 'Chałupnicza metoda" i wlutowac procesor atmega 128 nie jest problemem. co do kondensatorow czy rezystorow, jezeli zaczunasz robic juz w smd to polecam dostepne w sklepie takie zestawy, komplety z wartosciami z szeregow jak chodzi o rezystory czy kondensatory po 10 szt danej wartosci za niewielka cene i w smd. sam jak robilem pierwszego minisumo to tam udało mi sie wlozyc 3 plytki w postaci takiej kanapki i kazda z nich byla dwustronna. w najblizszym czasie postaram sie opublikowac na forum dokladny opis "Foxa" i juz prawie gotowego nastepcy w lepszej wersji. poszczegolne plytki polaczone sa listwami goldin, gdzie podaje zasilanie czy sterowanie z procesora na mostek na drugiej plytce poziom nizej. a tu wrzuce Ci fotke jak ta kanapka wyglada:
-
Co do przetwornicy to u siebie uzywam http://electropark.pl/przetwornice-dc-stabilizatory-impulsowe/1138-mc34063-przetwornica-dc-dc-so8-5901001138004.html . do tego masz gotowe kalkulatory w internecie, ale i tak pozniej samemu na wyczucie ustawiasz zeby parametry sie zgadzały. zamowiłem sobie ten moduł i powiem Ci ze zajmuje on sporo miejsca i nie nadaje sie do robota gdze chcesz zrobic jedna plytke , ale to jest moje zdanie. Co do smd to nie ma sie czego bac, dobry topnik w plynie do smd, lutwnica i cyna i nie ma zadnych obaw z ktir to troszke problem bo łapia na odleglosci 3mm, ale to nie problem obnizyc zawieszenie
-
Jezeli chciałbys sie zmieścić na jednej płytce to licz sie z tym że 10x10 cm to max pełny wymiar. Musisz odliczyc miejsce na silniki. Da sie to zrobic na jednej plytce, ale w gre wchodzi tu juz dwustronna i wtedy przechodzisz z elementami na smd, najlepiej ze wszystkimi. Zobacz sobie na atmege16 w wersji smd, piszesz ze macie w dipie, a to zajmie spory kawalek pola. Wtedy tez czujniki lini musisz zamienic na ktir0711 mocowane od zewnętrznej strony na plytce podwozia. Warto też pomysleć o jakiejś przetwornicy napiecia, mniej miejsca zajmuje i lepiej sie sprawdza niz stabilizator
-
1. użyłem przetrwornicy step-down - ST1S10PHR : 0,8V -15,3V 3A. wbrew pozorom dobrze się sprawuje, nie sieje zakłoceniami i sprawdza się w układzie. Nie wiem czy opinia kolegi zawiera jakies uwagi do mojej wersji, czy jest potrzeba zmian czy jest ok? 2. co do tranzystora, dokopałem sie do modułów sprzedawanych pod mostek jakiego użyłem i wzorowałem się na podanym modelu http://botland.com.pl/sterowniki-silnikow-moduly/32-tb6612-dwukanalowy-sterownik-silnikow-modul-pololu.html opisane jest tam co potrzeba 3. proszę o jakiś przyklad jak ma wygladać prawidlowe podlaczenie wyprowadzeń zasilania procesora, ze schematów które widziałem wiekszość wlasnie tak miala podpiety procesor. prosze o jakies rady co trzeba zmienic 4. z fuse-bitow to wpiety zewnetrzny kwarc, JTAG wyłaczony i nic wiecej nie robione skoro calość głupieje bez programatora.
-
schemat juz dodany w zalaczniku. dodam jeszcze ze opisana sytuacja przy podlaczonym programatorze ma taki chcarakter, ze wystarczy zeby programator byl wpiety przez zlacze kanda, nie musi byc podpiety do zasilania do komputera, wtedy na programatorze swieci sie dioda sygnalizujaca ze jest podpiety do zasilania i uklad programowany dziala poprawinie. odpiolem tez sygnal reset z programatora i nic sie nie zmienia. schemat sumo.pdf
-
Witam, mam spory problem z procesorem atmega 16. podlaczam uklad do programatora, pisze program, wszystko sie ladnie kompiluje i wgrywa i dziala jak nalezy. po odpieciu programatora nie wykonuje sie zaden program. napisalem program do zasiecenia diody po nacisnieciu przycisku. dziala jak jest wpiety programator, potem juz nie. do procesora wpiete sa 3 diody, jak jest procek zasilany swoim zasilaniem, nie tym z programatora jest ok, po odlaczeniu tego zasilania gdy zostaje tylko zasilanie z programatora swieca wszystkie 3. maja byc zapalane sygnalem wysokim z procka. sygnal reset podpiety do vcc przez rezystor 10k. prosze o pomoc, bo nie mam pojecia co jest nie tak. schemat sprawdzalem. masy i vcc sa tak jak powinny, spiete do vcc i gnd tak jak w programatorze wiec teoretycznie powinno dzialać bez niego, a nie dziala poprawnie.
-

Najlepszy światłolub - konkurs dla początkujących - Wyniki!
matti007 odpisał w temacie użytkownika Treker • Ogłoszenia organizacyjne
Konkurs z minisumo jaki zaproponowałeś jest fajnym pomysłem i osobiście piszę się na to. a może uchyliłbyś rąbka tajemnicy o tych 3 konkursach? -
Najlepszy światłolub - konkurs dla początkujących
matti007 odpisał w temacie użytkownika Treker • Ogłoszenia organizacyjne
Witajcie, chciałem dołączyć swojego światłoluba - F1bot-a do konkursu. Opis konstrukcji dostępny pod adresem F1bot. A teraz pare zdań o sobie i przygodzie jaką jest robotyka... Wszystko zaczęło sie od wyboru kierunku w technikum, co prawda telekomunikacja , ale pracownia też była i projekty też są do zrobienia. ile można robić wzmacniacze i badać je, czy składać moduliki do zabawy. Oczywiście ten etap też trzeba przerobić i pojąc podstwy, co i jak działa jak to wszystko ze sobą połączyć żeby miało to "ręce i nogi" . ale zacząłem szukać czegoś bardziej interesującego i znalazłem fora o robotach, konstrukcje jeżdżąca, pływające, latające i wiele innych. Powstało kilka już mniej lub bardziej ambitnych projektów wykonanych przeze mnie i ciągle doskonale się w tym fachu. Robotyka ma w sobie to coś, że jak się raz jej zasmakuje to nie ma siły żeby się od tego uwolnić. Jest lepsza od elektroniki, informatyki, mechaniki, mimo iż na nich bazuje bo wykracza poza ich granice. Prezentowany światłolub powstał już parę lat temu, a obenie pracuję nad LF oraz minisumo. Możliwe że już w tym sezonie pojawią się na arenach i pokażą swoje mozliwości. Możliwe że zaskoczą niektórych konstrukcją i skutecznością co światłolub F1bot. Pozdrawiam -
F1bot - mój światłolub
matti007 odpisał w temacie użytkownika matti007 • Projekty - DIY (początkujący)
sorki, moj blad. nie jest to plexi 3mm, ale plexi o grubości 2mm, juz poprawiam błąd. właśnie wyglada jak laminat, ale jest to plexi, lakier w sprayu i klej daje takie wrazenie. -
F1bot - mój światłolub
matti007 odpisał w temacie użytkownika matti007 • Projekty - DIY (początkujący)
dzieki wielkie, zdjecia juz poprawione. -
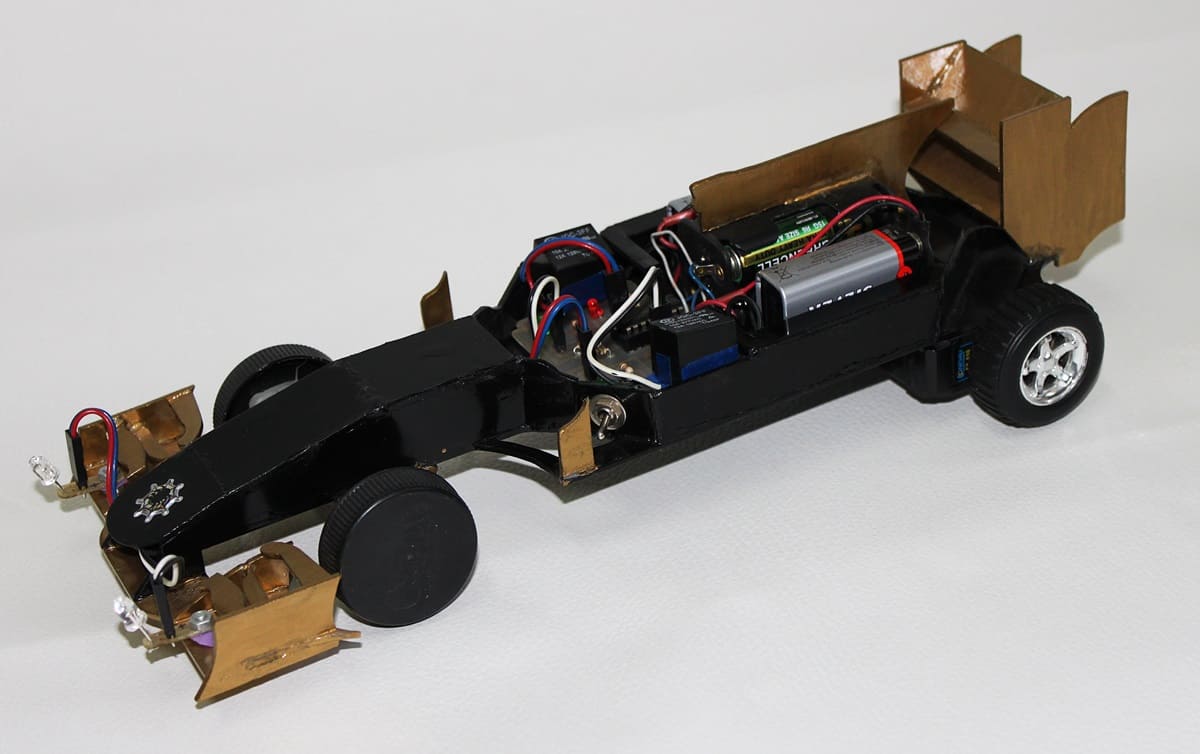
Witajcie, Chciałbym przedstawić swojego światłoluba, którego skonstruowałem już jakiś spory czas temu. Nie było jakoś okazji i czasu żeby się nim pochwalić, ale w końcu postanowiłem wrzucić go na forum. Elektronika nie odbiega niczym od prezentowanych tu projektów, lecz całą konstrukcję wykonałem własnoręcznie na wzór bolidu F1, z drobnymi modyfikacjami Ale zaczynając od początku... Elektronika Lista elementów użytych do budowy modułu z elektronika: - płyta główna wytrawiona wg rysunku -2 płytki pod fototranzystory – wycięte z płytki uniwersalnej - 4 akumulatorki 1,2 V -2 baterie 9V - 2 klipy na baterię 9V - koszyk na akumulatorki - wyłącznik - układ L293DNE - podstawka pod układ 16 pin - rezystory 220Ω sztuk 6 - diody led – 2 czerwone sztuki oraz 2 zielone sztuki, 3mm -2 fototranzystory -2 przekaźniki JQC-3FF - złącze na golpin - goldpiny męskie -przewody Jako napędu zastosowałem 2 serwomechanizmy CONRAD ES-030, odpowiednio przerobione. Sprawdzają się dość przyzwoicie, a poprzez zasilanie ich napięciem 9V, każdy z osobnej baterii , nie odbiegają parametrami od innych silników. Cały moduł z elektroniką powstał według poniższego schematu: Pozwoliłem sobie na drobne modyfikacje i wyjścia sygnału przeznaczone pierwotnie na silniki zostały podpięte pod przekaźniki, które po załączeniu doprowadzają do silników z osobnych baterii napięcie 9V. Z racji na znaczną odległość fototranzystory zostały umieszczone na osobnych płytkach podpiętych przewodami za pomocą golpinów i gniazd na goldpiny. Konstrukcja Lista elementów użytych do budowy konstrukcji: - plexi 2mm - 2 koła, 2 nakrętki -ślizgacz - emalia uniwersalna w sprayu -klej własnej produkcji, rozpuszczalnik nitro -2 śruby, nakrętki 3mm -narzędzia: brzeszczot do metalu, pilniki, papier ścierny, noże, hot glue, ściski Cała konstrukcja została wykonana z przezroczystej plexi o grubości 2mm. Każdy element został zaprojektowany i wykonany ręcznie przy użycie narzędzi takich jak: brzeszczot do metalu, pilnik, papier ścierny. Po wykonaniu wszystkich elementów konstrukcji nadszedł czas na połączenie wszystkich w całość. Użyłem kleju własnej produkcji – rozpuściłem wiórki z plexi w rozpuszczalniku nitro i pozostawiłem do uzyskania odpowiedniej konsystencji. Klej jest niezawodny, nie zostawia nalotu na plexi, nie odkształca elementu, daje się z łatwością malować i jest bardzo wytrzymały na łączeniu. Całość została wylakierowana emalią uniwersalną w sprayu w kolorze czarnym połysk oraz złotym. Użyte zostały 2 koła napędowe na tylną oś, wyciągnięte z jakiejś zabawki o osadzone na orczykach serw modelarskich, koła na przedniej osi wykonane zostały z nakrętek po soku, służą one tylko jako atrapy i nadają wygląd całości. Pomiędzy nimi znajduję ślizgacz służący jako przednia podpora. Przednie koła oraz serwa przymocowane są za pomocą kleju na gorąco. Cała konstrukcja ma następujące wymiary: 315mm długości, 124mm szerokości oraz 81mm wysokości. Galeria zdjęć: Na koniec krótki filmik pokazujący F1bot-a w akcji: Liczę na komentarze oraz opinie na temat prezentowanej przeze mnie konstrukcji. Pozdrawiam
-
Wygraj zestaw Microchip Microstick ll - konkurs firmy Microchip
matti007 odpisał w temacie użytkownika Treker • Ogłoszenia organizacyjne
a co piszecie w miejscu Title? -
Celem artykułu jest przybliżenie specyfiki materiałów stosowanych do budowy robotów. Znajdziecie tu charakterystykę plexiglassu, balsy, laminatu oraz aluminium. Również przybliżę w jaki sposób można je ze sobą łączyć, ciąć i formować oraz obrabiać aby tak aby tworzyło to estetyczną i funkcjonalną całość. Po pierwsze musimy zadać sobie pytanie co chcemy stworzyć? Czy nasz robot będzie line followerem, sumo, manipulatorem bądź zaliczanym do kategorii wielozadaniowe czy inne. Wybrany przez nas materiał do konstrukcji musi podołać wymaganiom jakie będziemy stawiać robotowi. Czy ma być szybki, odporny na uderzenia i warunki środowiskowe, a może wystarczy mu niewielka prędkość kosztem mocnego pancerza. Gdy już odpowiemy sobie na to pytanie skierujmy się do naszego portfela, określmy budżet i poświęćmy chwilę czasu na wybór odpowiedniego materiału do budowy konstrukcji, których nie brakuje w sklepach bądź w przydomowych warsztatach. 2. Plexiglass, plexi Z chemicznego punktu widzenia polimetakrylan metylu jest sztywnym, transparentnym materiałem termoplastycznym. Naturalnie bezbarwny o wyjątkowej przezroczystości, o doskonałej odporności na promieniowanie UV i warunki zewnętrzne, może być barwiony w celu uzyskania szerokiego zakresu odcieni i kolorów. Występuje w formie wylewanych i wytłaczanych płyt, granulatu, rur i prętów. Dostępny w każdym sklepie budowlanym jak i w sklepach internetowych. Jego niska cena przyciąga wielu zwolenników. Dostępne na rynku są płyty o różnych wymiarach i grubości, w zależności od potrzeb konstrukcji dobieramy je indywidualnie, jednak nie należy przesadzać z grubością płyty. Z plexi w łatwy sposób można otrzymać elementy konstrukcji o dość nietypowych kształtach. Z łatwością daje się obrabiać. Wystarczy modelarska wiertarka z nasadką do cięcia, bądź wyrzynarka aby wyciąć element, następnie można obrobić ją pilnikiem lub papierem ściernym, trzeba jednak uważać aby nie przesadzić z grubością papieru, ponieważ zostawia trudne do usunięcia rysy, najlepsze zostają papiery o drobnej ziarnistości. Na przezroczystą plexi łatwo nanieść kształt elementy, wystarczy zaprojektowany element wydrukować i odbić na plexi przerysowując go pisakiem lub wyciąć i przykleić taśma lub klejem biurowym. Posiadając wszystkie elementy należałoby je w jakiś sposób połączyć. I tu też mamy kilka możliwości do wyboru. Najlepiej byłoby użyć kleju, lecz te typu kropelka czy super glue zostawiają nieestetyczne ślady na łączeniach spowodowane procesem utleniania. Oczywiście dostępne są w sklepach specjalne kleje do plexi, jednak ich minusem jest wysoka cena. Osobiście polecam klej własnej produkcji, który bije na twarz te firmowe. Otóż przepis jest prosty, do słoiczka wsypujemy ścinki plexi powstałe w wyniku wiercenia w niej otworów, najlepiej dużą ilość, drobne ścinki plexi, jednak pozbawione zabrudzeń i to wszystko zalewamy rozpuszczalnikiem nitro w ilości przykrywającej dno. Im mniejsze ścinki wrzucimy tym szybciej rozpuszczalnik je rozpuści. Gęstość roztworu regulujemy ilością rozpuszczalnika, najlepiej aby był w miarę gęsty, ale tak aby łatwo przepływał po słoiku czy innym naczyniu. Po nałożeniu i wyschnięciu kleju otrzymujemy bezbarwne łączenie nie pozostawiających nieestetycznych śladów. Możemy również połączyć elementy klejem na gorąco. Jednak ich wygląd nie do końca może budzić zadowolenie. Winą za to jest kolor wystygniętego kleju, jak i rozlane i ciągnące się „gluty” po nałożeniu kleju. Jednak w sytuacjach, gdy zamierzamy narzucić kolor na plexi, klej na gorąco sprawdza się jako łączenie. Przydatny jest również wtedy, gdy musimy coś zatopić w grubej tafli plexi, np. łożysko. Trwale łączy ze sobą dwa różne materiały i pozostaje nie do zdarcia w czasie eksploatacji. No i oczywiście zawsze pozostaje nam opcja użycia wiertarki i kątowników oraz małej średnicy śrub. Sprawdza się to w przypadkach grubej plexi oraz w miejscach niewidocznych. Należy tu jednak uważać na docisk śruby, może to spowodować uszkodzenie, które w czasie eksploatacji negatywnie wpływa na konstrukcję osłabiając jej właściwości fizyczne (pęknięcia, uszczerbienia, itp.). Na samym końcu aby uatrakcyjnić robota możemy posłużyć się lakierem w sprayu, najlepiej emalią uniwersalna dostępną w sklepach z lakierami, artykułami samochodowymi czy zamawiając przez Internet. Podsumowując: plexi jest materiałem przydatnym przy budowie robotów, które maja wyglądać i nie są narażone na uszkodzenia mechaniczne, uderzenia, zarysowania. Przy niewielkich rozmiarach elementów materiał ten jest odporny na naprężenia, łatwo się go obrabia i wytwarza z niego estetyczne konstrukcje. 3. Balsa Jest to kolejny materiał, którym można się posłużyć przy budowie robota. Używany jest głównie przez modelarzy przy budowie modeli czołgów, samolotów i innych pojazdów. Nie stoi nic jednak, aby użyć go do naszej konstrukcji. Najogólniej mówiąc jest to bardzo lekkie drewno. Dostępne w najczęściej w formie desek o wymiarach 1000 x 100 mm i grubości 0,6 mm do 30 mm bądź zależnej od producenta, u którego się zaopatrujemy. Cena jednej sztuki waha się od około 8zł za najcieńszą do 30 zł za deskę o grubości 30mm. Jest to materiał odporny na zarysowania, a połączony w całą konstrukcję bardzo wytrzymały oraz lekki pomimo dużych gabarytów. Z łatwością daje się z niego wycinać elementy, nawet te najdrobniejsze. Z racji, że jest to drewno z łatwością się je obrabia, wygładza nierówności i zacięcia nawet drobnym pilnikiem i papierem ściernym, nie wspominając o tych narzędziach profesjonalnych, szlifierkach i różnych nasadkach do wiertarek modelarskich. Jeżeli chodzi o łączenie to zostaje tu już znacznie mniejszy wybór, a praktycznie go brak. Należałoby użyć tutaj kleju do drewna. Do wzmocnienia konstrukcji używa się również drewnianych a dokładnie sosnowych listewek modelarskich, kątowników, profili o przekroju kwadratowym, profili węglowych bądź płaskowników. Na koniec należałoby nadać określonych barw całej konstrukcji. Do tego celu posłużą nam farby dostępne w sklepach modelarskich, zwykle lakiery do drewna lub wcześniej wspomniana uniwersalna emalia w sprayu. Podsumowując: balsa idealnie nadaje się do większych konstrukcji, gdzie występują duże naprężenia lub praca robota w nietypowym terenie. Dużym plusem jest mała waga materiału przy dużej powierzchni. Przy odpowiednim wykończeniu powstają estetyczne konstrukcje spełniające wymagania konstruktora. 4. Laminat Jest to rodzaj kompozytów: tworzywa powstające z połączenia dwóch materiałów o różnych właściwościach mechanicznych, fizycznych i technologicznych, w których składnik wzmacniający jest układany w postaci warstw. Rozpatrywanym i najczęściej stosowanym jest laminat do używany do wyrobu płytek z obwodami drukowanymi, czyli laminat szklano-epoksydowy. Dostępne na rynku w wersji jednostronnej i dwustronnej oraz laminat bez miedzi. Dostępny w formie płytek, rur, prętów i arkuszy. Wykonywany jest on z tkaniny z włókna szklanego spojonej żywicą epoksydową, pokrywa się jednostronnie, lub z obu stron warstwą miedzi np. 18, 35 lub 70 mikrometrów. Jego główną i najbardziej znaczącą zaletą jest wysoka wytrzymałość mechaniczna i twardość powierzchni. Jednak swoje zalety uzyskuje za cenę swojej wagi, w porównaniu z balsa jest znacznie cięższy. Jest to materiał, który daje się w dosyć łatwy sposób formować. Naniesienie szkicu np. pisakiem danego elementu na laminat ułatwia wycięcie go za pomocą prostych narzędzi. Można posłużyć się tu piłką do metalu bądź wyrzynarką. Ostre brzegi i nierówności z łatwością dają się szlifować papierem ściernym bądź pilnikiem. Przy łączeniu elementów mamy do dyspozycji użycie już wcześniej opisanego sposobu z użyciem kątowników i śrub, lecz w tym przypadku bardziej skuteczne i efektowne jest łączenie poprzez lutowanie cyną. Odpowiednio przygotowane elementy łączymy np. za pomocą lutownicy kolbowej i cyny. W efekcie otrzymamy połączenie przypominające spaw. Po oczyszczeniu lutu za pomocą rozpuszczalnika nitro z zabrudzeń i po połączeniu wszystkich elementów nie będziemy mieć problemów z nałożeniem lakiery na powierzchnię konstrukcji. W niektórych przypadkach przydatny jest laminat bez miedzi. Możemy kupić już gotowe arkusze, bądź wytrawić całą płytkę. W efekcie otrzymamy materiał, który nada się np. do zrobienie chwytaka do naszego manipulatora. Możemy wtedy posłużyć się już tylko śrubami jako łącznika elementów lub ciekawym rozwiązaniem byłoby zastosowanie nitów i tulejek. Oczywiście całą konstrukcję można pokryć lakierem dla estetycznego wyglądu. Obecnie, na naszym rynku pojawia się coraz więcej firm, które oferują wyrób na bazie projektu gotowych płytek z obwodami. Coraz więcej konstruktorów wykorzystuje to. Mając do dyspozycji wysokiej klasy maszyny, gdzie precyzja sięga ideału tworzą układy, które są od razu w większej części konstrukcją robota. Dodając silniki, kółka oraz kilka dodatkowych elementów konstrukcyjnych otrzymują niezwykle lekkie konstrukcje, w granicach 300 gram, osiągające zawrotne prędkości podczas jazdy. Konstrukcje te nie potrzebują dodatkowych łączeń, gdyż składają się z dwóch do trzech elementów konstrukcyjnych, gdzie łączenie odbywa się czasami za pomocą kilku śrubek, w większości przypadków stanowią one jedną płytę laminatu. 5. Aluminium Powstaje poprzez stopienie Aluminium, a właściwie Glinu, z różnymi metalami, uzyskując w ten sposób określone cechy aluminium. Jest bardzo odporne na korozję. Dodatkowo aluminium charakteryzuje się bardzo dobrym współczynnikiem wytrzymałości do ciężaru, znacznie lepszym niż stal. Aluminium jako, iż posiada odpowiednią wytrzymałość, jest przy tym lekkie i nadaje się do obróbki za pomocą prostych narzędzi, problem pojawia się wtedy gdy chcemy wyciąć element. W większości przypadków konstruktorzy decydują się na wycięcie laserem danych elementów konstrukcyjnych. Połączenie elementów tez nie jest do końca tak łatwe jak w powyższych przypadkach. Najmniej kłopotliwym rozwiązaniem jest użycie śrub, kątowników i innych elementów wspierających konstrukcję. Można również zakupić klej do łączenia aluminiowych elementów, lecz jest to spory wydatek. Lecz żeby nie utrudniać sobie zbytnio sprawy, należałoby zastosować połączenie lutowane. Należy tu użyć palnika i ogólnie dostępnego stopu, w celu uzyskania połączenia znacznie trwalszego i mocniejszego niż klejone. Aluminium wykorzystywane jest w większości w konstrukcjach robotów kroczących. Nie występuje tam dużo połączeń elementów aluminiowych ze sobą bezpośrednio. Nadaje się również do konstrukcji chwytaków. Sprawdza się tu jego wytrzymałość i mała waga. 6.Zakończenie Przedstawione powyżej materiały stosowane w robotyce, są najczęściej spotykanymi. To wszystko zależy od konstruktora i specyfiki robota. Nie koniecznie cała konstrukcja musi być wykonana z jednego materiały. Można je łączyć i tworzyć efektowne roboty. Należy się również wykazywać pomysłowością i wyobraźnią przy wyrobie poszczególnych elementów.

-
To ja zajmę się tematem: "Materiały do budowy robotów (aluminium, balsa, laminat)"