kasprzyk.michal
-
Zawartość
5 -
Rejestracja
-
Ostatnio
-
Wygrane dni
1
Osiągnięcia użytkownika kasprzyk.michal
")





-
Świetna konstrukcja! Również chciałbym się dowiedzieć czegoś więcej na temat mapowania trasy.
-
Line follower Turtle
kasprzyk.michal odpisał w temacie użytkownika kasprzyk.michal • Projekty - DIY roboty
Jest to mój pierwszy robot wiec jeżeli chodzi o rozmieszczenie czujników to po prostu założyłem sobie że będą one rozmieszczone co 15mm. Co do wysokości to moduł czujników początkowo był umieszczony tuż przy module głównym lecz to rozwiązanie nie sprawdziło się. Postanowiłem go oddalić również na odległość którą sobie ustaliłem z góry i nie poparłem jej żadnymi wcześniejszymi testami. Co do filmu z kamerą umieszczoną na robocie, prędkość zadana była zbyt duża. Jak już pisałem wcześniej, w przyszłym tygodniu postaram się dodać jakiś film z profesjonalnie przygotowanej trasy. -
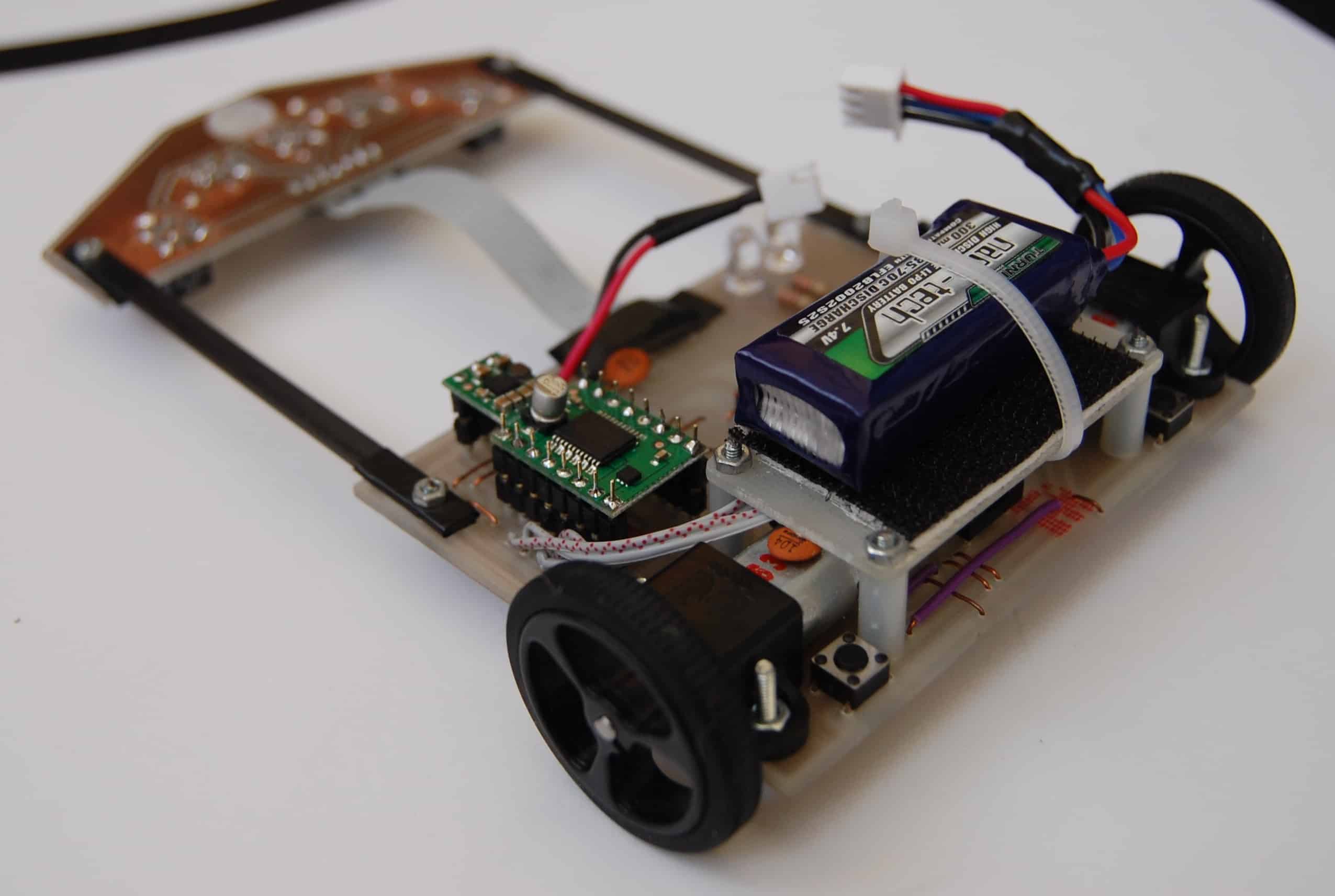
Witam. Chciałbym Wam przedstawić mojego pierwszego robota klasy LineFollower o nazwie Turtle. Robot składa się z dwóch modułów. Po raz pierwszy zaprezentował się na zawodach ROBOmotion 2013 w Rzeszowie. Moduł czujników W module zastosowałem 5 transoptorów CNY70. Początkowo zostały one ułożone w linii prostej. Po pierwszych zawodach zmieniłem ich ułożenie poprzez przesunięcie 2 skrajnych sensorów w stronę modułu głównego. Czujniki są podłączone do kolejnych portów ADC mikrokontrolera. Wymiary modułu czujników to: 90 x 40mm. Moduł czujników połączony jest za pomocą listewek węglowych z modułem głównym. Moduł główny Płytka modułu głównego spełnia dwie podstawowe role: jest ona podwoziem dla robota oraz obwodem drukowanym. Wymiary: 90 x 70mm. Za przetwarzanie sygnału analogowego z czujników na postać cyfrową, realizacje algorytmu jazdy LineFollowera, a następnie sterowanie mostkami H i generowanie sygnału PWM odpowiedzialny jest mikrokontroler Atmega8 Jako sterownik silników zastosowany został moduł TB6612FNG. Jeden moduł odpowiedzialny jest za sterowanie dwóch silników. Do zasilania robota używam pakietu Li-Pol Turnigy nano-tech 300mAh. Bezpośrednio z akumlatora zasilane są silniki natomiast stabilizowane napięcie 5V w celu zasilenia pozostałej elektroniki zostało uzyskane dzięki przetwornicy S7V7F5. Napęd Napęd robota stanowią dwa silniki Pololu HP z przekładnią 30:1 na które zamontowane są koła wraz z oponami firmy Pololu o średnicy 32mm. Program Program został napisany w języku C. Zaimplementowany został algorytm PID z pewnymi modyfikacjami. Osiągnięcia 1 miejsce - Robocomp 2013 w Krakowie - LF Light Filmy Zamieszczam również dwa filmy które zostały nagrane u mnie w domu na prowizorycznej trasie. Za kilka dni postaram się dodać kilka nagrań z uczelni.

- 6 odpowiedzi
-
- 11
-

-
Schemat do LineFollower'a.
kasprzyk.michal odpisał w temacie użytkownika kasprzyk.michal • Sprawdzanie schematów
@MacGyver, poprawiłem to o czym wspomniałeś w swoim poście. Czy mogłbyś teraz na to popatrzeć ? Faktycznie, lepszy pomysł. Nie miałem czasu tego zmienić na poprawionym schemacie. Pozdrawiam. -
Witam, czy moglibyście rzucić okiem na mój schemat linefollower'a ? Pozdrawiam.