Przeszukaj forum
Pokazywanie wyników dla tagów 'Braccio'.
Znaleziono 1 wynik
-
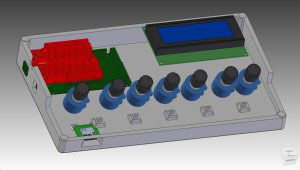
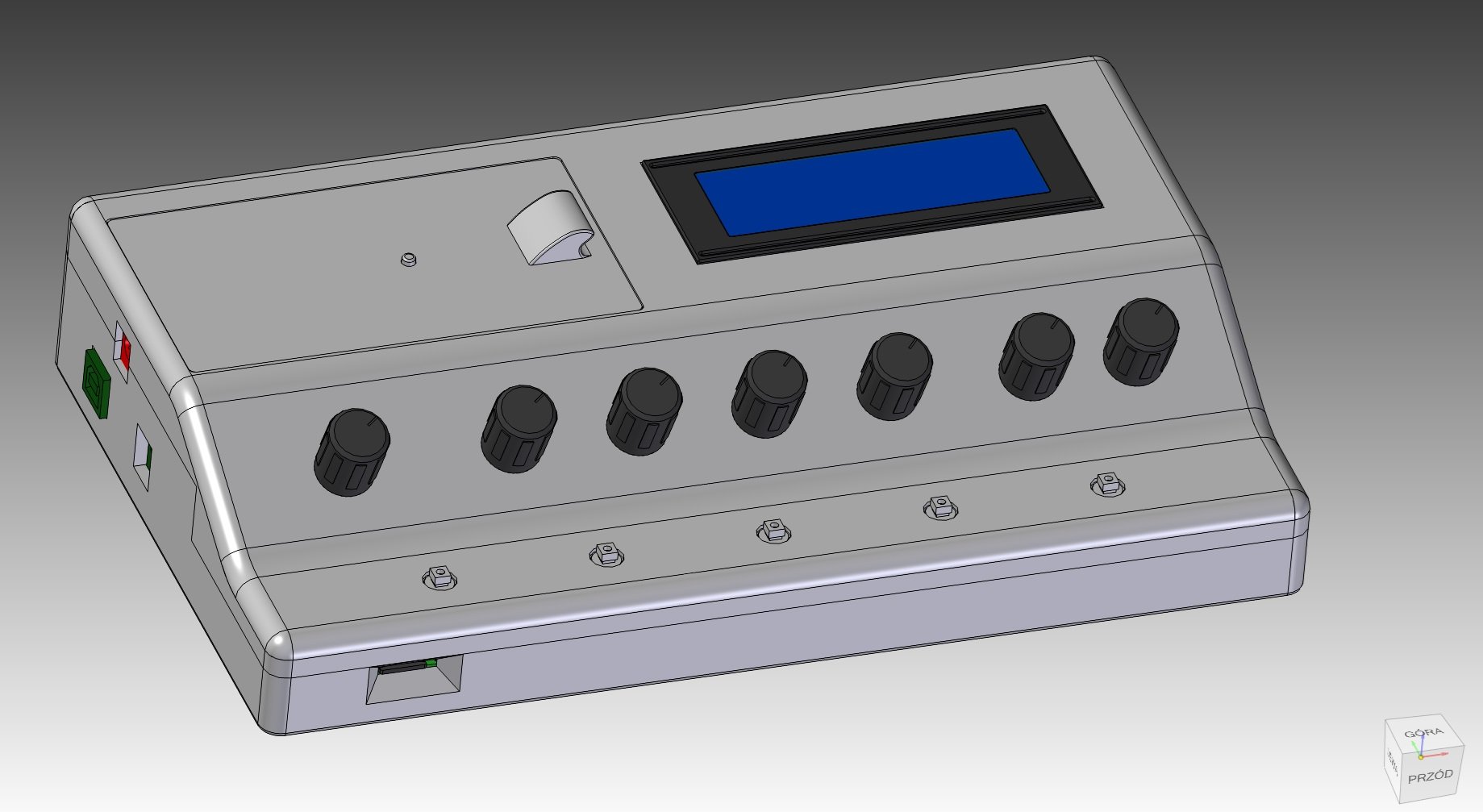
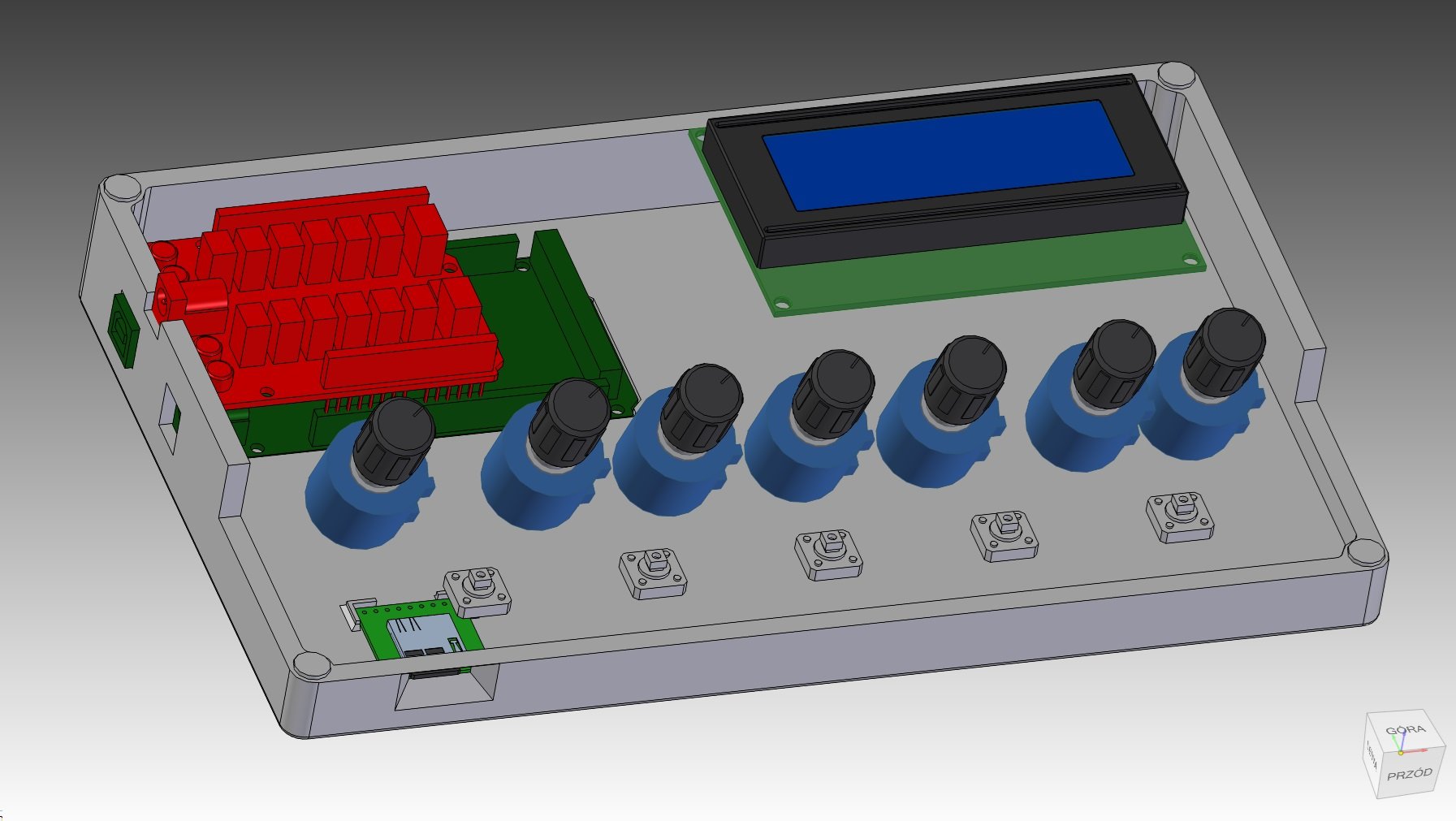
Cześć, Jakiś rok temu zacząłem przygodę z elektroniką i programowaniem. Po zakupie i zrobieniu kursów na Forbocie zacząłem wykonywać nowe projekciki. Moją uwagę przyciągnął manipulator Braccio. Stwierdziłem że jest to świetna baza do nauki programowania pod jakieś bardziej złożone projekty . Tak więc kupiłem manipulator. Po złożeniu można powiedzieć że delikatnie się rozczarowałem gdyż żeby wykonać jakiś złożony program z ruchami jest bardzo ciężko. W pętli wpisujemy komendę ruchu wraz z pozycjami wszystkich silników i prędkości (BraccioRobot.moveToPosition(pos.set(180, 165, 0, 0, 180, 10), 50); ) Jest to na tyle uciążliwe że wpisujemy pozycję z ręki i patrzymy po uruchomieniu co się wydarzy. Stwarza to duże ryzyko kolizji i zniszczenia zabawki. Zapewne myślałem że kupując taki zestaw będzie się go programowało jak na zajęciach z robotyki ustawiamy na pozycje i zapisujemy. Dlatego też postanowiłem stworzyć taki sterownik od zera. W założeniu w trybie uczenia będziemy mogli sterować dowolnie każdym silnikiem i zapisywać pozycję w jakiej jest robot. A w trybie automatycznym wykonać wcześniej zapisane ruchy. W projekcie wykorzystałem 7 potencjometrów wieloobrotowych (6 na każdy silnik i jeden do ustawiania prędkości), 5 przycisków (obecnie program wykorzystuje 4 ;) , moduł karty pamięci, wyświetlacz LCD 4x20, diodę sygnalizacyjną, a całe sterownie jest na ARDUINO MEGA z powodu możliwości późniejszej rozbudowy projektu. Obecnie po uruchomieniu sterownik zaczytuje program z karty pamięci , jeżeli takiego nie ma to wyświetla się komunikat. Po wciśnięciu jednego z przycisków wchodzimy w tryb uczenia. W tym trybie kręcimy potencjometrami ustawiając całego robota w potrzebnej pozycji oraz ustawiając prędkość dla poszczególnego przejazdu. Pozycje poszczególnych serw pokazywane są na wyświetlaczu LCD. Wciskamy przycisk i zapisujemy pozycję na kartę SD. Po zapisaniu wszystkich pozycji możemy wejść w tryb automatyczny i po wciśnięciu przycisku robot będzie wykonywał zapisane ruchy aż do wciśnięcia innego przycisku. Program jest jeszcze archaiczny i dużo rzeczy trzeba poprawić czy dorobić ( jak np zapis wielu programów i ich wybór, sterowanie poprzez wpisanie pozycji XYZ chwytaka i wiele wiele innych). Jednak w tym momencie zabawa z programowaniem przestała być wygodna. Prowizoryczne podłączenie na płytce stykowej, małe potencjometry itp powodowały przerwania przy ustawianiu itp. Dlatego stwierdziłem że kolejny krok to wykonanie kompatybilnej obudowy. Porysowałem cały projekt w 3d i zleciłem wykonanie obudowy do wykonania. Obecnie jestem na etapie montażu i lutowania pierwszej wersji sterownika Gdy to skończę wrzucę jakieś filmy jak to pracuje wszystko i biorę się na rozbudowę programu sterującego. Tak czy inaczej na chwilę obecną jestem w stanie zaprogramować i wykonywać ruchy robota bez użycia komputera. Gdyby kogoś zainteresował temat dorzucę jeszcze jakieś zdjęcia i efekt finalny Pozdrawiam