Przeszukaj forum
Pokazywanie wyników dla tagów 'INA219'.
Znaleziono 1 wynik
-
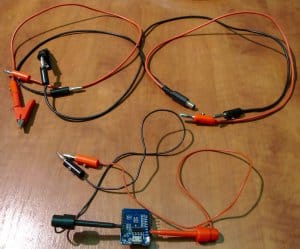
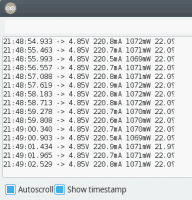
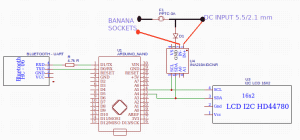
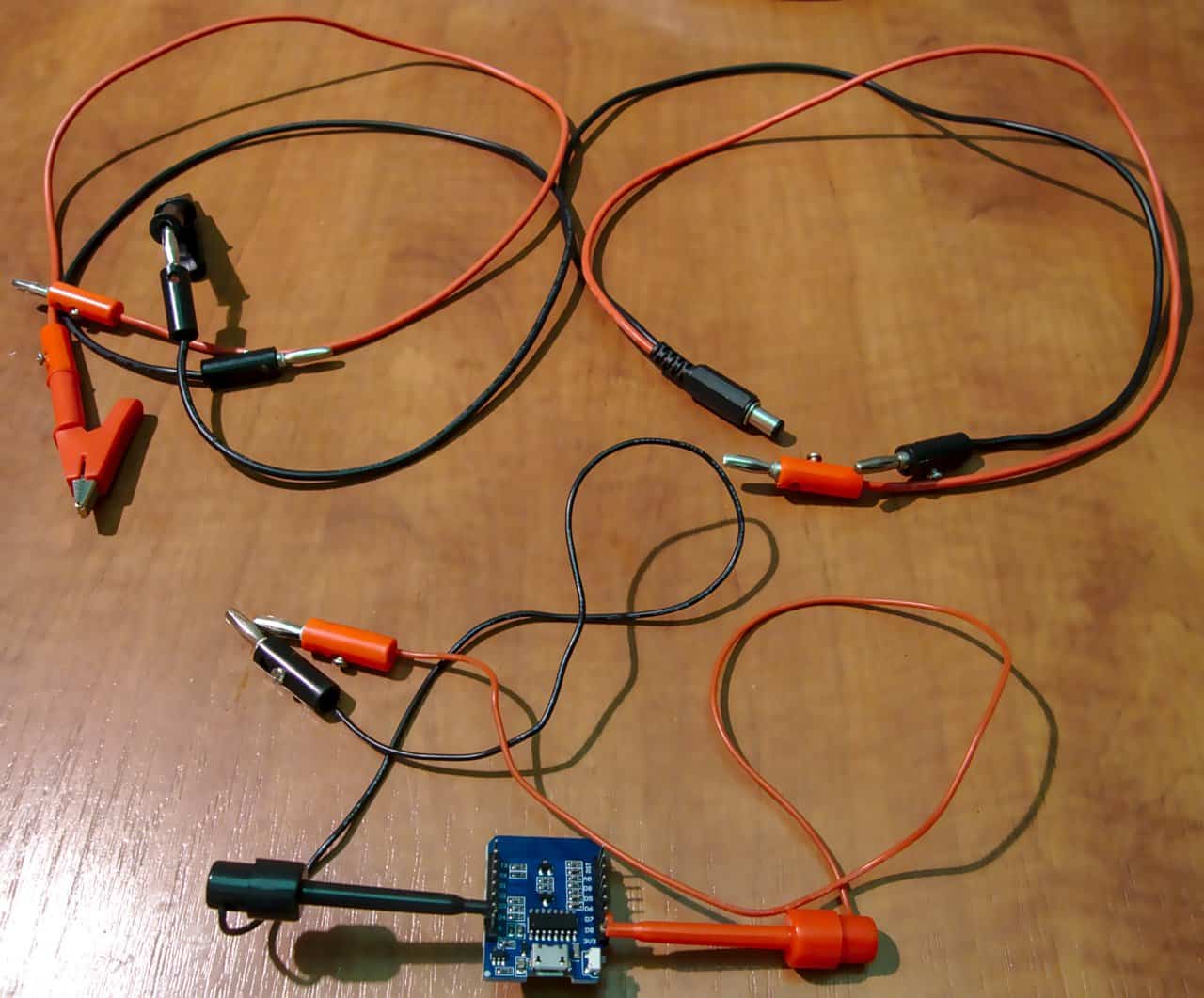
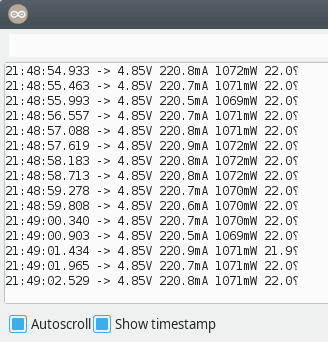
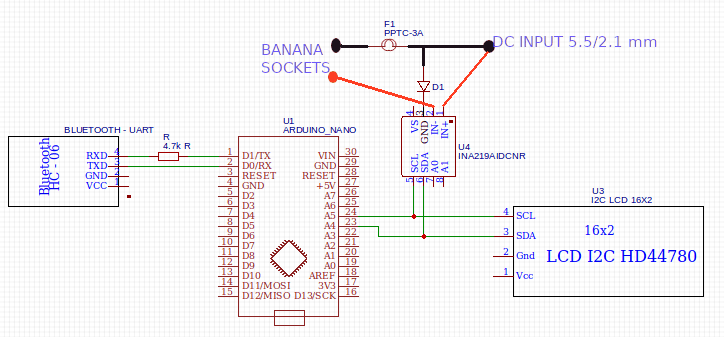
 Multimetry logujące dane na komputerze są drogie. Nie mówiąc już o miernikach monitorujących równocześnie napięcie, natężenie i moc oraz rezystancję odbiornika. Może więc warto zrobić coś takiego samemu? Projekt służy jedynie do pomiaru w obwodach prądu stałego przy NIEWIELKICH napięciach (nominalnie do 26V) i ograniczonym natężeniu (sprawdź specyfikację zastosowanego modułu). Absolutnie nie należy go stosować przy napięciu sieciowym, czy też wysokowydajnych źródłach prądu (np akumulator samochodowy pomimo bezpiecznego napiącia 13V w razie zwarcia może dostarczyć KILKASET AMPERÓW, co również może okazać się groźne)! Składniki: Arduino Nano (wbudowane gniazdo Micro USB zapewni łatwe zasilanie z powerbanku, możemy też użyć Pro Mini, które zapewni większą energooszczędność) moduł miernika z magistralą I²C INA219 wyświetlacz LCD 2x16 z konwerterem I²C LCM1602 Bluetooth - UART np w postaci modułu HC-06 czy HC-05 bezpiecznik (zastosowałem PPTC 3A) gniazdo oraz wtyki bananowe 4 mm gniazdo DC 5.5/2.1 mm- Bluetooth HC-05 oraz 06 obsługują poziom logiczny napięć 3.3V. Gotowe moduły posiadają jednak na ogół stabilizator pozwalający zasilić je bezpośrednio z 5V. Nadal pozostaje jednak problem 5V "logicznych" z wyjścia UART (czyli pinu TX) w Arduino. Najlepiej zastosować tu dzielnik napięcia lub konwerter poziomów logicznych. Ja wstawiłem szeregowo rezystor by w razie czego ograniczyć natężenie prądu. To jeszcze nie "zabiło" HC-06, ale też nie jest rozwiązaniem "podręcznikowym" i zalecanym. Port nadawczy (TX) w Bluetooth możemy za to bez obaw podłączyć bezpośrednio z odbiorczym (RX) w Arduino. Kod źródłowy w tym wypadku był prawdę mówiąc banalny do napisania, gdyż wymagał jedynie drobnych zmian przykładu dla stosowanej biblioteki. #include <Wire.h> #include <Adafruit_INA219.h> //https://github.com/adafruit/Adafruit_INA219 #include <LiquidCrystal_I2C.h> //https://github.com/fdebrabander/Arduino-LiquidCrystal-I2C-library #include <Narcoleptic.h> //https://github.com/rcook/narcoleptic #define DiodeVoltageDrop 0.42 LiquidCrystal_I2C lcd(0x27, 16, 2); Adafruit_INA219 ina219; void setup(void) { Serial.begin(9600); while (!Serial) { // will pause Zero, Leonardo, etc until serial console opens delay(1); } Narcoleptic.disableTimer1(); Narcoleptic.disableTimer2(); Narcoleptic.disableADC(); Narcoleptic.disableSPI(); uint32_t currentFrequency; // Initialize the INA219. // By default the initialization will use the largest range (32V, 2A). However // you can call a setCalibration function to change this range (see comments). ina219.begin(); // To use a slightly lower 32V, 1A range (higher precision on amps): //ina219.setCalibration_32V_1A(); // Or to use a lower 16V, 400mA range (higher precision on volts and amps): //ina219.setCalibration_16V_400mA(); lcd.begin(); lcd.backlight(); } void loop(void) { // float shuntvoltage = 0; float busvoltage = 0; float current_mA = 0; // float loadvoltage = 0; float power_mW = 0; // shuntvoltage = ina219.getShuntVoltage_mV(); busvoltage = ina219.getBusVoltage_V() + DiodeVoltageDrop; current_mA = 1086.5 / 1104.0 * (ina219.getCurrent_mA() - 1.4); power_mW = abs(busvoltage * current_mA); float impedance = abs(busvoltage / current_mA * 1000.0); // power_mW = ina219.getPower_mW(); // loadvoltage = busvoltage + (shuntvoltage / 1000); Serial.print(busvoltage); Serial.print("V "); Serial.print(current_mA, 1); Serial.print("mA "); Serial.print(power_mW, 0); Serial.print("mW "); Serial.print(impedance, 1); Serial.println((char)244); lcd.clear(); lcd.print(busvoltage); lcd.print("V "); lcd.print(current_mA, 1); lcd.print("mA"); lcd.setCursor(0, 1); lcd.print(power_mW, 0); lcd.print("mW "); lcd.print(impedance, 1); lcd.print((char)244); Narcoleptic.delay(500); } Do pomiaru napięcia przez układ INA219 wymagane jest połączenie GND zasilania elektroniki z GND mierzonego obwodu. Z tego też względu nie zalecam zasilać urządzenia z gniazda USB w komputerze. W razie pomyłki możemy uszkodzić komputer! Dlatego do "kablowania" danych użyłem Bluetooth. INA219 niestety nie toleruje również odwrotnej polaryzacji - potencjał po stronie mierzonego prądu nie może być niższy względem GND. Może to doprowadzić do uszkodzenia układu. Nie jest to więc urządzenie odpowiednie do "ręcznego" pomiaru napięcia zwykłymi sondami z multimetru - niezmiernie łatwo tu o odwrotną polaryzację! Dla bezpieczeństwa wstawiłem diodę pomiędzy masą miernika a mierzonego układu. Nieco przekłamuje to pomiar napięcia (spadek napięcia na diodzie nie jest dokładnie stały, jak skorygowałem w szkicu). Za to sama konstrukcja powinna zapewnić wygodną obsługę. Z boku znajdziemy gniazdo DC do podłączenia zasilacza dla mierzonego układu oraz gniazda bananowe dla kabli "wyjściowych". Do zestawu oczywiście NIE dołączono uniwersalnego zestawu kabli pomiarowych. Musiałem więc zrobić je sobie sam Przewody z wtykiem bananowym 4 mm na wejściu są zakończone: wtykiem DC 5.5/2.1 mm (wtedy multimetr jest po prostu "przedłużaczem" zwykłego zasilacza) ponownie wtykiem bananowym, co umożliwia zastosowanie np "krokodylków" jako nakładki czy podłączenie "normalnego" multimetru celem kalibracji zaciskiem typu "hak" do bezpośredniego wpinania się w goldpiny Łatwo więc podłączymy nasze urządzenie pomiędzy zasilacz a odbiornik. Po podłączeniu komputera z modułem Bluetooth - UART utworzony jest wirtualny port szeregowy. Np dla Linuksa powstanie plik urządzenia /dev/rfcomm*. Uzyskane pomiary możemy zapisać w postaci logu np za pomocą putty czy też terminalowych narzędzi dla Linuksa. Napisałem też własny program w C++, który zapisze dane otrzymane z portu szeregowego do pliku. Skompilujemy go poprzez g++ serial2log.cpp serialib/serialib.cpp -o serial2log -std=c++17 Wcześniej należy jednak umieścić Serialib ::: Simple Serial Library w folderze serialib. Jako parametry wywoływanego programu podajemy adres portu szeregowego, baud rate oraz nazwę pliku tekstowego z logiem. Np: ./serial2log /dev/ttyUSB0 9600 log.txt Pracę kończymy w bardzo "brutalny" sposób: Ctrl + C. //g++ serial2log.cpp serialib/serialib.cpp -o serial2log -std=c++17 #include <iostream> #include <chrono> #include <thread> #include <fstream> #include <ctime> #include "serialib/serialib.h" //http://serialib.free.fr int main(int argc, char *argv[]) { if (argc != 4) { std::cout << "Usage: ./serial2log serial_port baud_rate log_file\n"; return 0; } serialib LS; // Object of the serialib class int Ret; // Used for return values char Buffer[128]; // Open serial port Ret=LS.Open(argv[1],atoi(argv[2])); // Open serial link if (Ret!=1) { // If an error occured... std::cout << "Error while opening port. Permission problem?\n"; // ... display a message ... return Ret; // ... quit the application } std::cout << "Serial port opened successfully!\n"; std::ofstream logfile; logfile.open(argv[3], std::ios::out | std::ios::app); /* Ret=LS.WriteString("AT\n"); // Send the command on the serial port if (Ret!=1) { // If the writting operation failed ... std::cout << "Error while writing data\n"; // ... display a message ... return Ret; // ... quit the application. } std::cout << "Write operation is successful \n"; */ while(1){ Ret=LS.ReadString(Buffer,'\n',128,5000); // Read a maximum of 128 characters with a timeout of 5 seconds // The final character of the string must be a line feed ('\n') if (Ret>0){ std::time_t currentTime = std::time(nullptr); std::cout << currentTime << " >> " << Buffer; // If a string has been read from, print the string logfile << currentTime << " >> " << Buffer << std::flush; } else std::cout << "TimeOut reached. No data received !\n"; // If not, print a message. std::this_thread::sleep_for(std::chrono::milliseconds(100)); } // Close the connection with the device LS.Close(); logfile.close(); return 0; } Zastosowanie: całkowanie numeryczne poboru prądu po czasie. Mamy urządzenie, którego "łakomstwo" zmienia się w czasie, a my chcemy oszacować czas jego pracy na akumulatorze. Musimy więc jakoś uśrednić jego pobór prądu. Np montaż paralaktyczny teleskopu pobiera inne natężenie prądu w trakcie podążania za ruchem dobowym nieba, a inne w trybie pozycjonowania na zadany obiekt (GoTo). Po testach będziemy mogli więc oszacować, jak długo będzie on pracował zasilany z akumulatora żelowego.
Multimetry logujące dane na komputerze są drogie. Nie mówiąc już o miernikach monitorujących równocześnie napięcie, natężenie i moc oraz rezystancję odbiornika. Może więc warto zrobić coś takiego samemu? Projekt służy jedynie do pomiaru w obwodach prądu stałego przy NIEWIELKICH napięciach (nominalnie do 26V) i ograniczonym natężeniu (sprawdź specyfikację zastosowanego modułu). Absolutnie nie należy go stosować przy napięciu sieciowym, czy też wysokowydajnych źródłach prądu (np akumulator samochodowy pomimo bezpiecznego napiącia 13V w razie zwarcia może dostarczyć KILKASET AMPERÓW, co również może okazać się groźne)! Składniki: Arduino Nano (wbudowane gniazdo Micro USB zapewni łatwe zasilanie z powerbanku, możemy też użyć Pro Mini, które zapewni większą energooszczędność) moduł miernika z magistralą I²C INA219 wyświetlacz LCD 2x16 z konwerterem I²C LCM1602 Bluetooth - UART np w postaci modułu HC-06 czy HC-05 bezpiecznik (zastosowałem PPTC 3A) gniazdo oraz wtyki bananowe 4 mm gniazdo DC 5.5/2.1 mm- Bluetooth HC-05 oraz 06 obsługują poziom logiczny napięć 3.3V. Gotowe moduły posiadają jednak na ogół stabilizator pozwalający zasilić je bezpośrednio z 5V. Nadal pozostaje jednak problem 5V "logicznych" z wyjścia UART (czyli pinu TX) w Arduino. Najlepiej zastosować tu dzielnik napięcia lub konwerter poziomów logicznych. Ja wstawiłem szeregowo rezystor by w razie czego ograniczyć natężenie prądu. To jeszcze nie "zabiło" HC-06, ale też nie jest rozwiązaniem "podręcznikowym" i zalecanym. Port nadawczy (TX) w Bluetooth możemy za to bez obaw podłączyć bezpośrednio z odbiorczym (RX) w Arduino. Kod źródłowy w tym wypadku był prawdę mówiąc banalny do napisania, gdyż wymagał jedynie drobnych zmian przykładu dla stosowanej biblioteki. #include <Wire.h> #include <Adafruit_INA219.h> //https://github.com/adafruit/Adafruit_INA219 #include <LiquidCrystal_I2C.h> //https://github.com/fdebrabander/Arduino-LiquidCrystal-I2C-library #include <Narcoleptic.h> //https://github.com/rcook/narcoleptic #define DiodeVoltageDrop 0.42 LiquidCrystal_I2C lcd(0x27, 16, 2); Adafruit_INA219 ina219; void setup(void) { Serial.begin(9600); while (!Serial) { // will pause Zero, Leonardo, etc until serial console opens delay(1); } Narcoleptic.disableTimer1(); Narcoleptic.disableTimer2(); Narcoleptic.disableADC(); Narcoleptic.disableSPI(); uint32_t currentFrequency; // Initialize the INA219. // By default the initialization will use the largest range (32V, 2A). However // you can call a setCalibration function to change this range (see comments). ina219.begin(); // To use a slightly lower 32V, 1A range (higher precision on amps): //ina219.setCalibration_32V_1A(); // Or to use a lower 16V, 400mA range (higher precision on volts and amps): //ina219.setCalibration_16V_400mA(); lcd.begin(); lcd.backlight(); } void loop(void) { // float shuntvoltage = 0; float busvoltage = 0; float current_mA = 0; // float loadvoltage = 0; float power_mW = 0; // shuntvoltage = ina219.getShuntVoltage_mV(); busvoltage = ina219.getBusVoltage_V() + DiodeVoltageDrop; current_mA = 1086.5 / 1104.0 * (ina219.getCurrent_mA() - 1.4); power_mW = abs(busvoltage * current_mA); float impedance = abs(busvoltage / current_mA * 1000.0); // power_mW = ina219.getPower_mW(); // loadvoltage = busvoltage + (shuntvoltage / 1000); Serial.print(busvoltage); Serial.print("V "); Serial.print(current_mA, 1); Serial.print("mA "); Serial.print(power_mW, 0); Serial.print("mW "); Serial.print(impedance, 1); Serial.println((char)244); lcd.clear(); lcd.print(busvoltage); lcd.print("V "); lcd.print(current_mA, 1); lcd.print("mA"); lcd.setCursor(0, 1); lcd.print(power_mW, 0); lcd.print("mW "); lcd.print(impedance, 1); lcd.print((char)244); Narcoleptic.delay(500); } Do pomiaru napięcia przez układ INA219 wymagane jest połączenie GND zasilania elektroniki z GND mierzonego obwodu. Z tego też względu nie zalecam zasilać urządzenia z gniazda USB w komputerze. W razie pomyłki możemy uszkodzić komputer! Dlatego do "kablowania" danych użyłem Bluetooth. INA219 niestety nie toleruje również odwrotnej polaryzacji - potencjał po stronie mierzonego prądu nie może być niższy względem GND. Może to doprowadzić do uszkodzenia układu. Nie jest to więc urządzenie odpowiednie do "ręcznego" pomiaru napięcia zwykłymi sondami z multimetru - niezmiernie łatwo tu o odwrotną polaryzację! Dla bezpieczeństwa wstawiłem diodę pomiędzy masą miernika a mierzonego układu. Nieco przekłamuje to pomiar napięcia (spadek napięcia na diodzie nie jest dokładnie stały, jak skorygowałem w szkicu). Za to sama konstrukcja powinna zapewnić wygodną obsługę. Z boku znajdziemy gniazdo DC do podłączenia zasilacza dla mierzonego układu oraz gniazda bananowe dla kabli "wyjściowych". Do zestawu oczywiście NIE dołączono uniwersalnego zestawu kabli pomiarowych. Musiałem więc zrobić je sobie sam Przewody z wtykiem bananowym 4 mm na wejściu są zakończone: wtykiem DC 5.5/2.1 mm (wtedy multimetr jest po prostu "przedłużaczem" zwykłego zasilacza) ponownie wtykiem bananowym, co umożliwia zastosowanie np "krokodylków" jako nakładki czy podłączenie "normalnego" multimetru celem kalibracji zaciskiem typu "hak" do bezpośredniego wpinania się w goldpiny Łatwo więc podłączymy nasze urządzenie pomiędzy zasilacz a odbiornik. Po podłączeniu komputera z modułem Bluetooth - UART utworzony jest wirtualny port szeregowy. Np dla Linuksa powstanie plik urządzenia /dev/rfcomm*. Uzyskane pomiary możemy zapisać w postaci logu np za pomocą putty czy też terminalowych narzędzi dla Linuksa. Napisałem też własny program w C++, który zapisze dane otrzymane z portu szeregowego do pliku. Skompilujemy go poprzez g++ serial2log.cpp serialib/serialib.cpp -o serial2log -std=c++17 Wcześniej należy jednak umieścić Serialib ::: Simple Serial Library w folderze serialib. Jako parametry wywoływanego programu podajemy adres portu szeregowego, baud rate oraz nazwę pliku tekstowego z logiem. Np: ./serial2log /dev/ttyUSB0 9600 log.txt Pracę kończymy w bardzo "brutalny" sposób: Ctrl + C. //g++ serial2log.cpp serialib/serialib.cpp -o serial2log -std=c++17 #include <iostream> #include <chrono> #include <thread> #include <fstream> #include <ctime> #include "serialib/serialib.h" //http://serialib.free.fr int main(int argc, char *argv[]) { if (argc != 4) { std::cout << "Usage: ./serial2log serial_port baud_rate log_file\n"; return 0; } serialib LS; // Object of the serialib class int Ret; // Used for return values char Buffer[128]; // Open serial port Ret=LS.Open(argv[1],atoi(argv[2])); // Open serial link if (Ret!=1) { // If an error occured... std::cout << "Error while opening port. Permission problem?\n"; // ... display a message ... return Ret; // ... quit the application } std::cout << "Serial port opened successfully!\n"; std::ofstream logfile; logfile.open(argv[3], std::ios::out | std::ios::app); /* Ret=LS.WriteString("AT\n"); // Send the command on the serial port if (Ret!=1) { // If the writting operation failed ... std::cout << "Error while writing data\n"; // ... display a message ... return Ret; // ... quit the application. } std::cout << "Write operation is successful \n"; */ while(1){ Ret=LS.ReadString(Buffer,'\n',128,5000); // Read a maximum of 128 characters with a timeout of 5 seconds // The final character of the string must be a line feed ('\n') if (Ret>0){ std::time_t currentTime = std::time(nullptr); std::cout << currentTime << " >> " << Buffer; // If a string has been read from, print the string logfile << currentTime << " >> " << Buffer << std::flush; } else std::cout << "TimeOut reached. No data received !\n"; // If not, print a message. std::this_thread::sleep_for(std::chrono::milliseconds(100)); } // Close the connection with the device LS.Close(); logfile.close(); return 0; } Zastosowanie: całkowanie numeryczne poboru prądu po czasie. Mamy urządzenie, którego "łakomstwo" zmienia się w czasie, a my chcemy oszacować czas jego pracy na akumulatorze. Musimy więc jakoś uśrednić jego pobór prądu. Np montaż paralaktyczny teleskopu pobiera inne natężenie prądu w trakcie podążania za ruchem dobowym nieba, a inne w trybie pozycjonowania na zadany obiekt (GoTo). Po testach będziemy mogli więc oszacować, jak długo będzie on pracował zasilany z akumulatora żelowego.