Przeszukaj forum
Pokazywanie wyników dla tagów 'RPi4'.
Znaleziono 4 wyniki
-

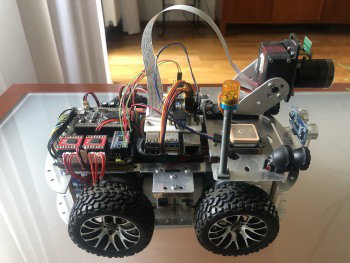
Robot edukacyjny 4WD (Raspberry Pi 4 + Arduino + PID)
RomekAtomek opublikował temat w Projekty - DIY roboty
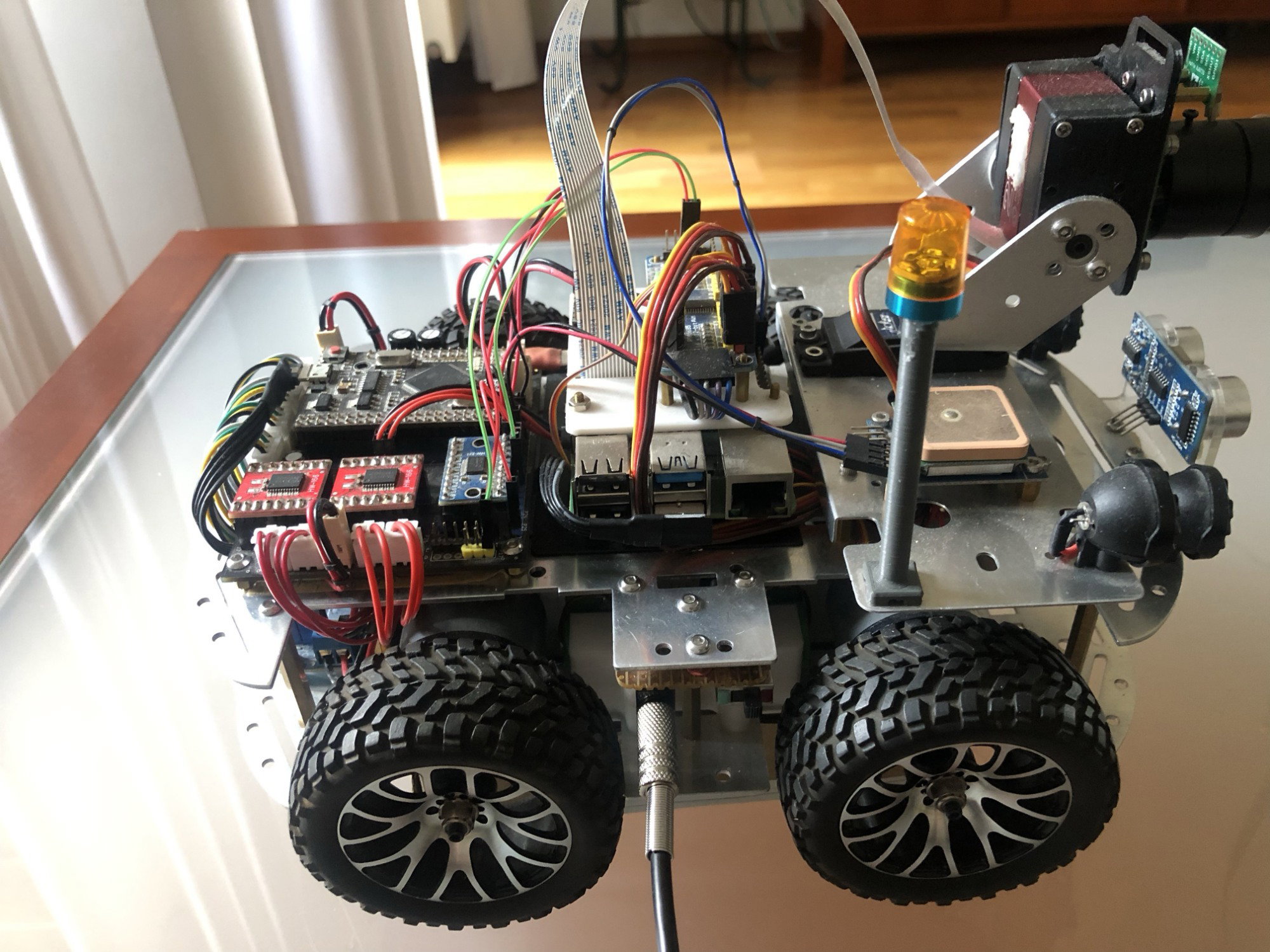
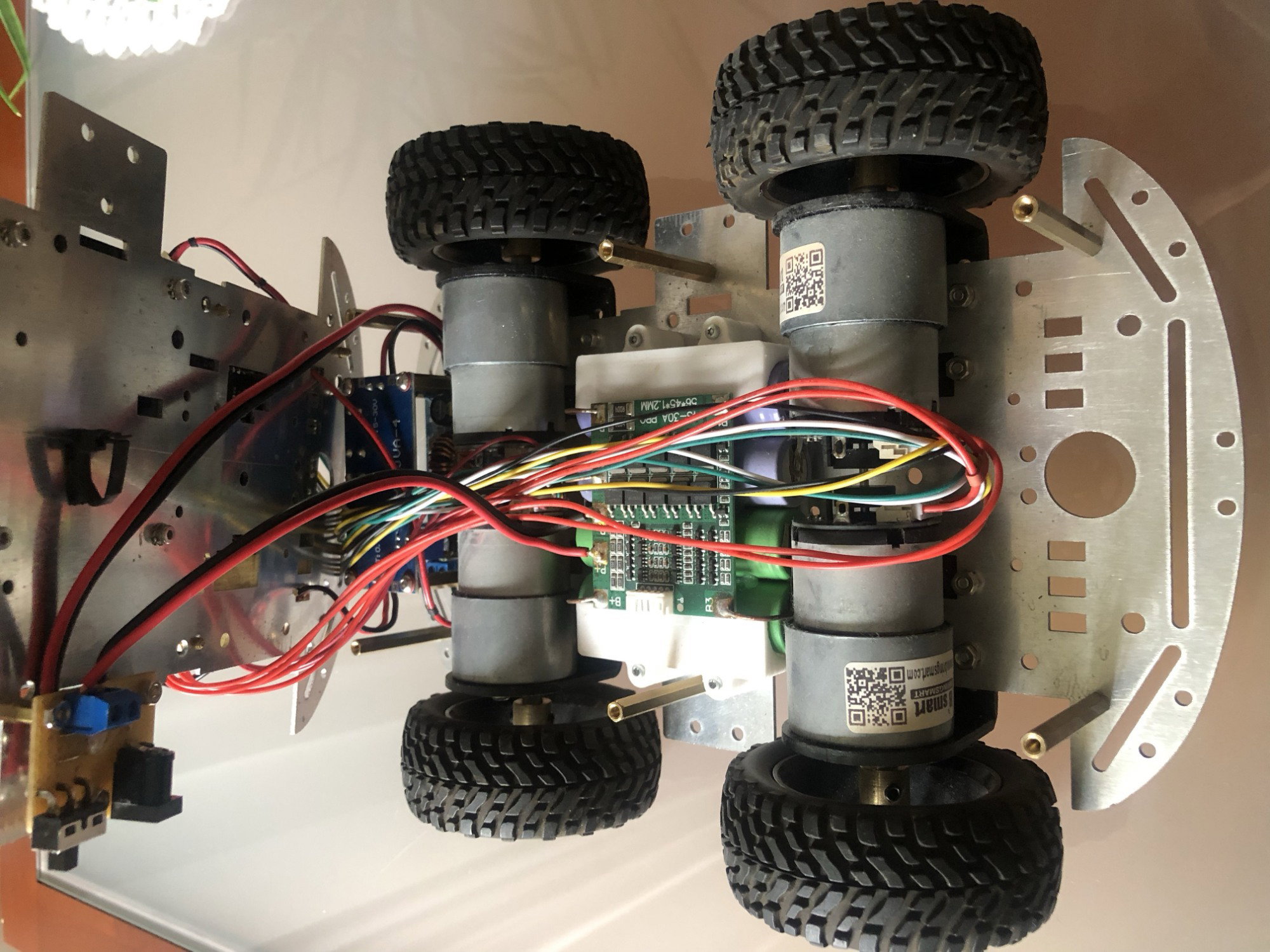
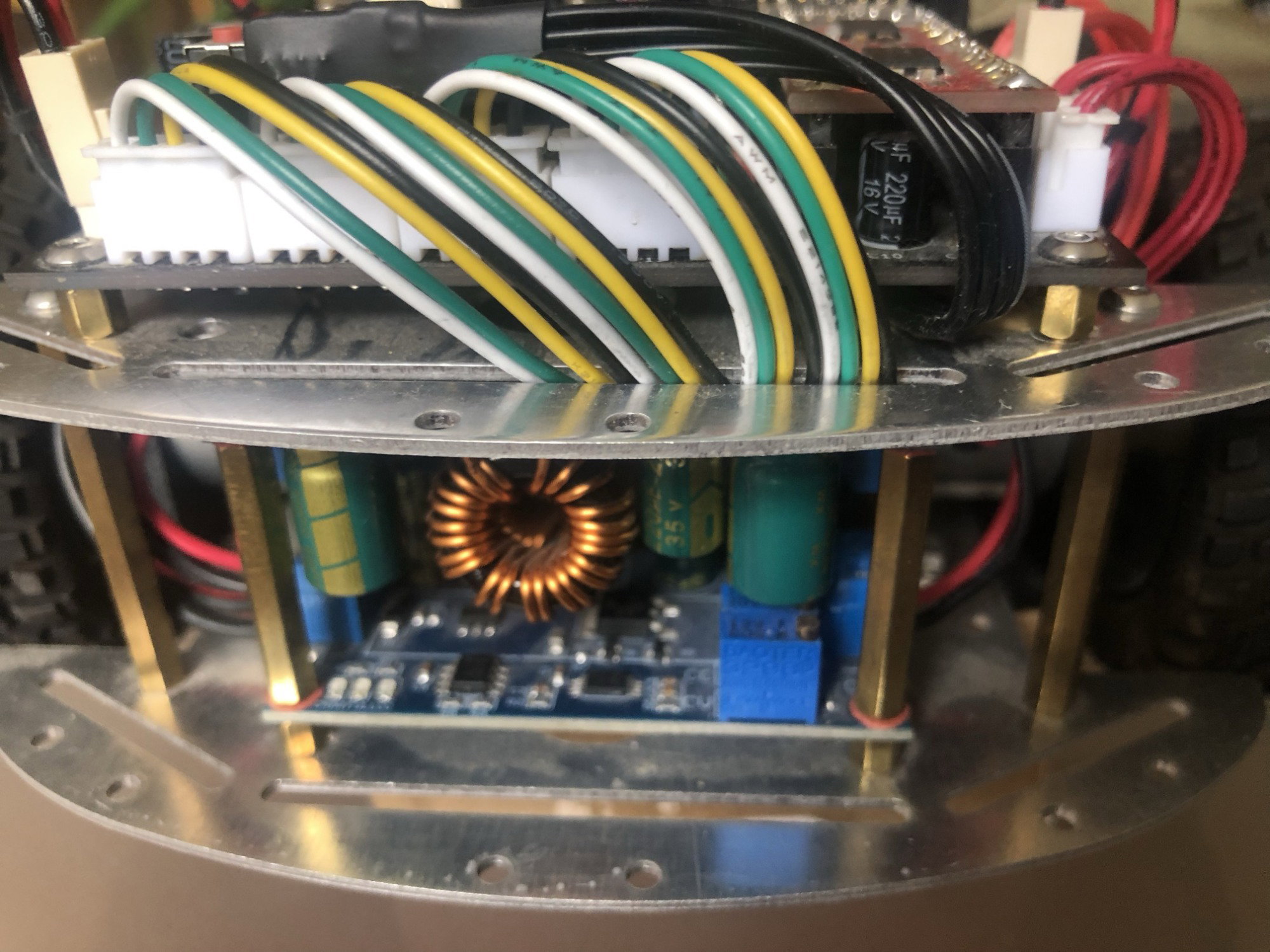
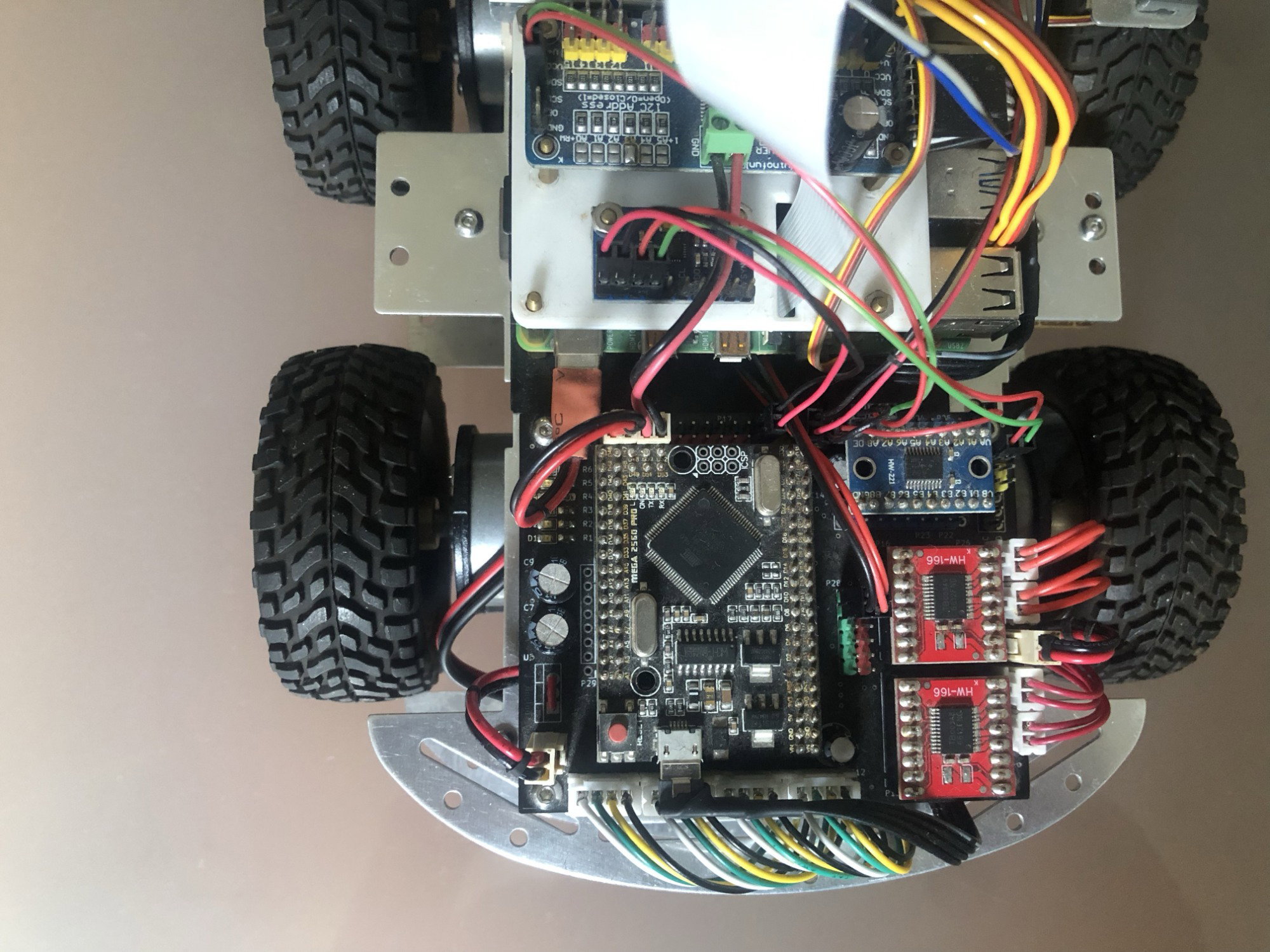
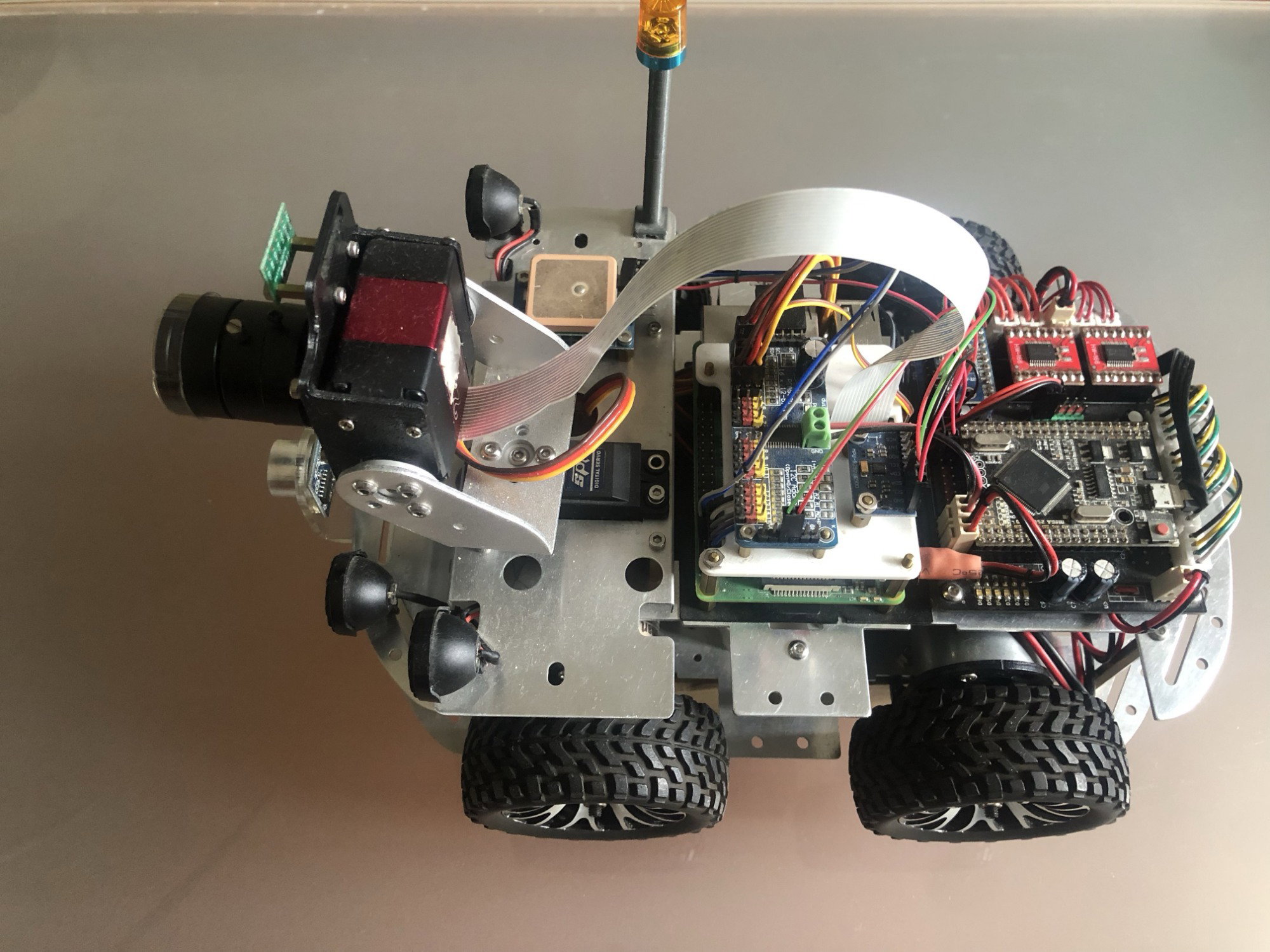
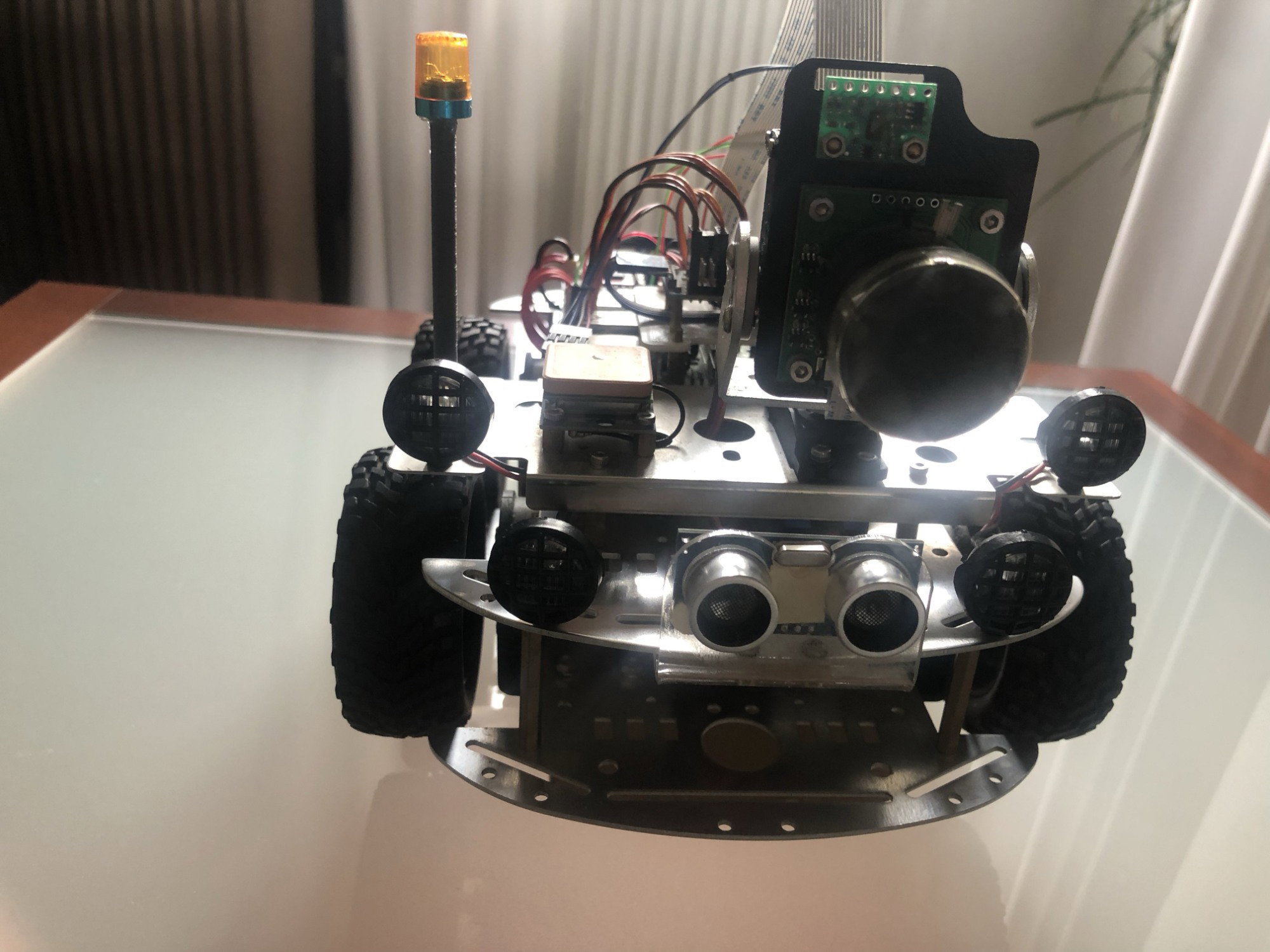
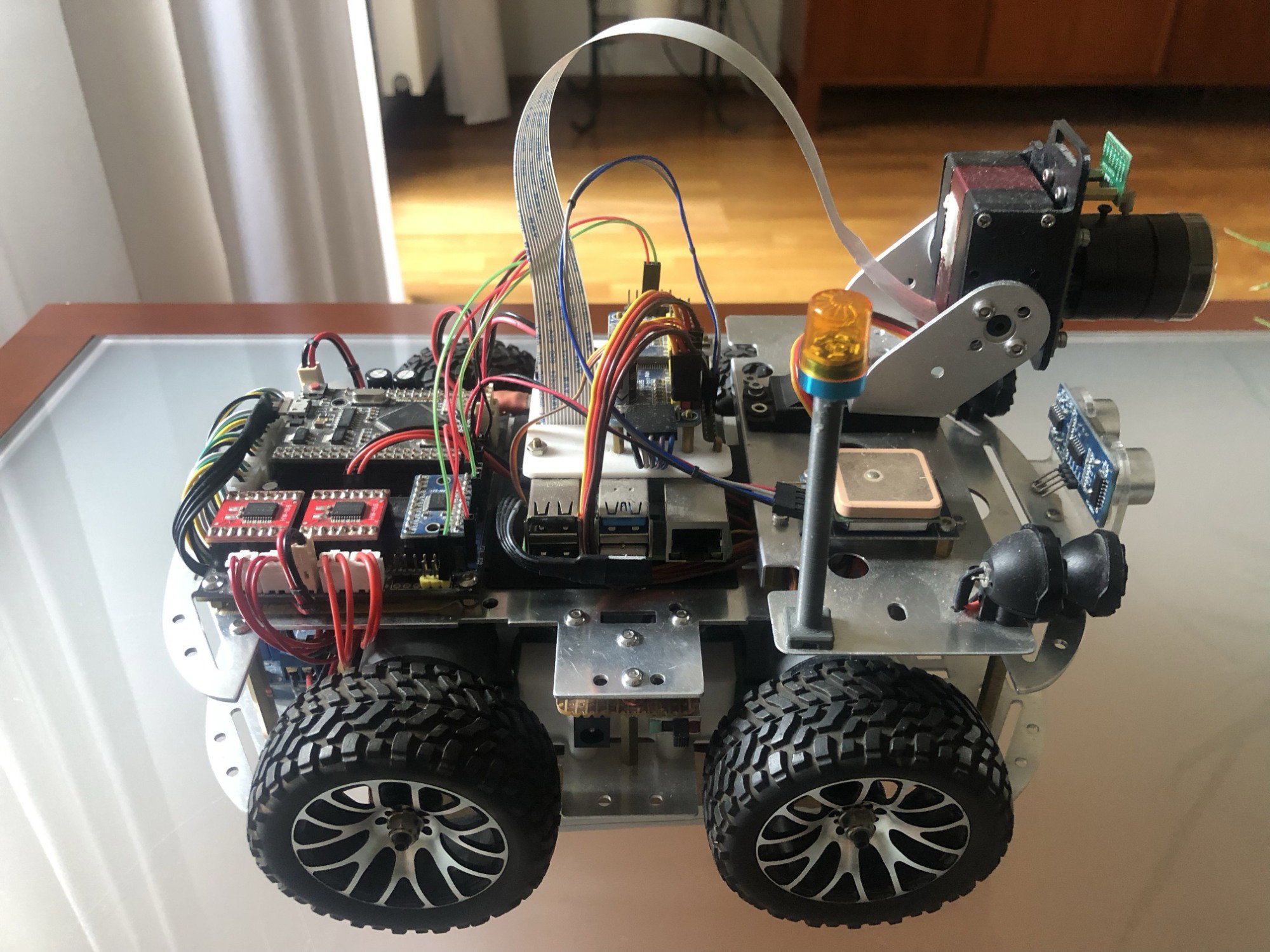
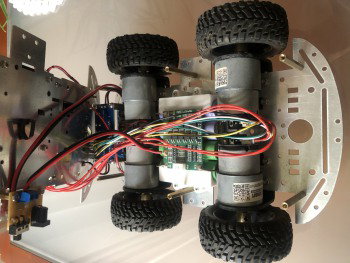
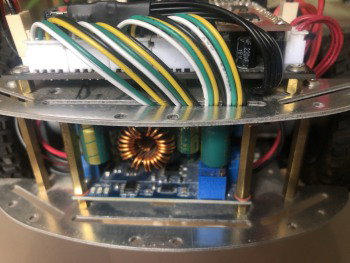
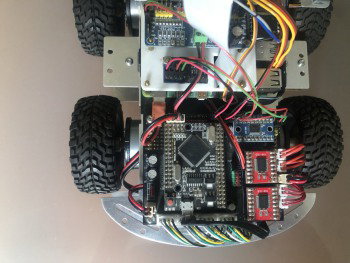
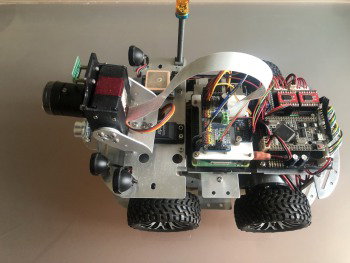
Cześć! Kilka lat temu, aby ułatwić młodej osobie naukę programowania, stworzyłem jeżdżącego robota. Zaprezentowałem już wcześniej na tym forum dwa elementy tego projektu (kontroler napędu oraz uchwyt kamery). W niniejszej publikacji chciałbym opisać i zaprezentować całą konstrukcję w obecnym kształcie. Ewolucja projektu Ze względu na założenie, że głównym celem jest nauka programowania, jako serce robota wybrałem Raspberry Pi. Prace zacząłem od zakupu Maliny w wersji 4, gotowego podwozia, 4 małych silników (bez enkoderów) oraz prostego układu sterującego. Szybko okazało się, że RPi ma za mało pinów GPIO, aby spełnić wszystkie nasze wymagania, a podstawowe silniki nie zapewniają żadnej precyzji ruchu. Zmusiło mnie to do zmiany założeń. Do projektu dodałem Arduino jako kontroler wykonawczy oraz zakupiłem większe silniki wyposażone w enkodery kwadraturowe. Specyfikacja techniczna Ostatecznie na pokładzie robota znalazły się następujące komponenty: Raspberry Pi 4 – główny kontroler (komunikacja, logika, zarządzanie urządzeniami). Klon Arduino – kontroler napędu (regulator PID) oraz obsługa urządzeń on/off. Podwozie 4WD – mocniejsze silniki z enkoderami o dużej rozdzielczości. Moduł GPS – do pozycjonowania w terenie (na razie nie został uruchomiony; mam wątpliwości, czy jest sprawny). Ultradźwiękowy czujnik odległości – do detekcji przeszkód. Akcelerometr – do monitorowania orientacji i stabilności robota. Kamera – zamontowana na gimbalu sterowanym w dwóch osiach (Pan/Tilt). Sterownik 16 serw – oparty na układzie PCA9685. Układ zasilania – dedykowany system oparty na ogniwach Li-ion. Dodatki – efekty wizualne i oświetlenie robota. Główny kontroler: Raspberry Pi 4 Odpowiada za wyższą warstwę logiczną, komunikację oraz sterowanie wszystkimi peryferiami. Całe oprogramowanie systemowe zostało napisane w C++. Obecnie eksperymentuję z wykorzystaniem algorytmów sztucznej inteligencji (AI) do autonomicznej kontroli napędu. Dużą zaletą konfiguracji jest to, że RPi służy również do programowania Arduino. Dzięki temu nie trzeba podpiąć robota bezpośrednio do komputera kablem – wgrywanie kodu na mikrokontroler odbywa się zdalnie przez Malinę, co drastycznie ułatwia pracę. Napęd i sterowanie silnikami Jako dedykowany sterownik silników zastosowałem klona Arduino. Jest tani, łatwy w programowaniu i oferuje odpowiednią liczbę pinów do obsługi enkoderów. W celu synchronizacji i precyzyjnej kontroli prędkości kół zaimplementowałem programowy regulator PID. Arduino odbiera gotowe polecenia ruchu z Raspberry Pi poprzez magistralę I2C. W najbliższym czasie planuję podpiąć czujnik odległości bezpośrednio do Arduino, aby realizował funkcję "hardware'owego" hamulca awaryjnego (zatrzymanie napędu po wykryciu bliskiej przeszkody bez czekania na reakcję RPi). Zasilanie Do zasilania całej konstrukcji wykorzystałem pakiet 4 ogniw 18650. Jako ładowarki używam zmodyfikowanego zasilacza od laptopa z odrobinę obniżonym napięciem wyjściowym. Robot posiada dwa obwody zasilania: 5V – do zasilania kontrolerów (RPi, Arduino). 12V – dedykowane dla silników. Stabilne napięcia zapewniają dwie niezależne przetwornice DC-DC. Oczywiście robot jest plug-in: Rzut oka pod "maskę": Sterownik serw Aby nie obciążać mikrokontrolerów generowaniem wielu sygnałów PWM, zastosowałem zewnętrzny sterownik do 16 serw wykorzystujący układ PCA9685 (komunikujący się również po I2C). Odpowiada on m.in. za płynne sterowanie pozycją kamery w dwóch osiach oraz obsługę dodatkowych akcesoriów. Efekt końcowy możecie obejrzeć tutaj.

-
jak w temacie - najlepiej z warszawy.
-
- 1
-

-
- Raspberry Pi
- RPi4
- (i 1 więcej)
-
 Witam wszystkich, Na wstępie dodam, że to mój pierwszy post i przepraszam za błędy. Potrzebuje zbudować dla znajomego serwer dla skanów z drukarki po FTP/smb. Ze względu na budżet bardzo okrojony (500zl...wiadomo i tak go przekroczę bo dyski...) pomyślałem o RPI 4/5. Pliki dość ważne więc byłyby wiec mam pomysł wpięcia dwóch dyskow pod USB. Jeden SSD jako system wraz ze skanami plus kopia różnicowa na ten sam dysk plus dodatkowy HDD z kopia różnicowa plus całościową z kompresją. Problemy są dwa jakie widzę. Czytałem gdzieś że RPI ma problem z mocą na USB i może nie uciągnąć dysku HDD, a drugi to, że ceny RPI tak podskoczyła, że zastanawiam się nad kupnem terminala jakiegoś (tylko jakiego...) które uciągnąć by dwa dyski i może by i RAID jakiś oferował (aczkolwiek niekonieczne bo ze spokojem kopie mogę zrobić inaczej). Problem z terminalami jest taki, że nie znam się na nich by określić jaki e cenie do 400zl( 500 jak warto) byłby najlepszy. Może być nawet taniej ( tym lepiej) terminal są o tyle dobre w porównaniu do dzisiejszych cen RPI, że (chyba) są wydajniejsze i w przyszłości dałoby radę rozszerzyć ze spokojem spektróm działania serwera o inne rzeczy. Na ten moment cena jest dla mnie najważniejsza. To czemu taka kwota mimo że skany są ważne pozostawiam dla siebie gdyż ze względów...biznesowych nie mogę tego zdradzić i niestety na ten moment nie może on sobie pozwolić na jakiegoś NAS np synology. Z góry bardzo dziękuję za wyrozumiałość i porady.
Witam wszystkich, Na wstępie dodam, że to mój pierwszy post i przepraszam za błędy. Potrzebuje zbudować dla znajomego serwer dla skanów z drukarki po FTP/smb. Ze względu na budżet bardzo okrojony (500zl...wiadomo i tak go przekroczę bo dyski...) pomyślałem o RPI 4/5. Pliki dość ważne więc byłyby wiec mam pomysł wpięcia dwóch dyskow pod USB. Jeden SSD jako system wraz ze skanami plus kopia różnicowa na ten sam dysk plus dodatkowy HDD z kopia różnicowa plus całościową z kompresją. Problemy są dwa jakie widzę. Czytałem gdzieś że RPI ma problem z mocą na USB i może nie uciągnąć dysku HDD, a drugi to, że ceny RPI tak podskoczyła, że zastanawiam się nad kupnem terminala jakiegoś (tylko jakiego...) które uciągnąć by dwa dyski i może by i RAID jakiś oferował (aczkolwiek niekonieczne bo ze spokojem kopie mogę zrobić inaczej). Problem z terminalami jest taki, że nie znam się na nich by określić jaki e cenie do 400zl( 500 jak warto) byłby najlepszy. Może być nawet taniej ( tym lepiej) terminal są o tyle dobre w porównaniu do dzisiejszych cen RPI, że (chyba) są wydajniejsze i w przyszłości dałoby radę rozszerzyć ze spokojem spektróm działania serwera o inne rzeczy. Na ten moment cena jest dla mnie najważniejsza. To czemu taka kwota mimo że skany są ważne pozostawiam dla siebie gdyż ze względów...biznesowych nie mogę tego zdradzić i niestety na ten moment nie może on sobie pozwolić na jakiegoś NAS np synology. Z góry bardzo dziękuję za wyrozumiałość i porady. -
 Ledwie w innym wątku pochwaliłem się działającymi skryptami a już męczę to samo rozwiązanie na RPi4. Z jakiegoś powodu stronka WWW działa tylko po części, czyta stany portów GPIO ale już nie steruje portami. Fakt, że wyświetla mi stany portów wskazuje na poprawną komunikację PHP-Python w ścieżce cgi-bin. Skrypty *.py wywoływane w shellu realizują poprawnie sterowanie portami GPIO. Dotarłem do ściany, w necie nie znalazłem odpowiedzi na moje problemy. Dajcie jakieś natchnienie koledzy, proszę...
Ledwie w innym wątku pochwaliłem się działającymi skryptami a już męczę to samo rozwiązanie na RPi4. Z jakiegoś powodu stronka WWW działa tylko po części, czyta stany portów GPIO ale już nie steruje portami. Fakt, że wyświetla mi stany portów wskazuje na poprawną komunikację PHP-Python w ścieżce cgi-bin. Skrypty *.py wywoływane w shellu realizują poprawnie sterowanie portami GPIO. Dotarłem do ściany, w necie nie znalazłem odpowiedzi na moje problemy. Dajcie jakieś natchnienie koledzy, proszę...