Przeszukaj forum
Pokazywanie wyników dla tagów 'SVPWM'.
Znaleziono 1 wynik
-
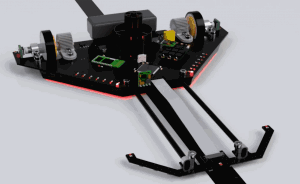
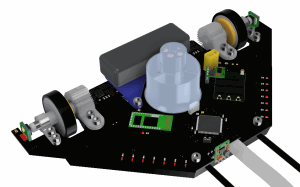
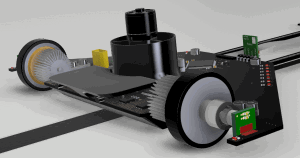
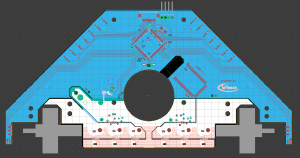
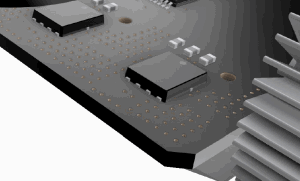
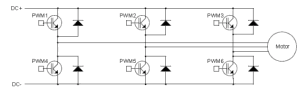
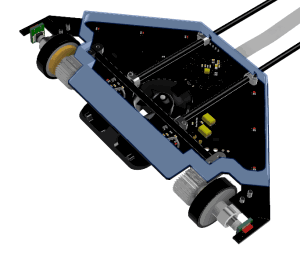
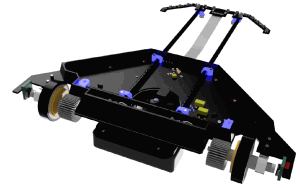
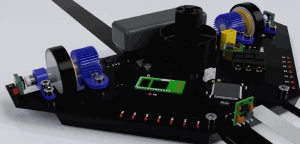
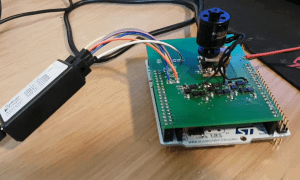
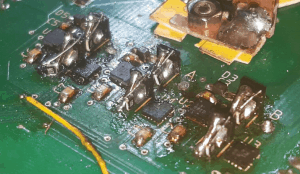
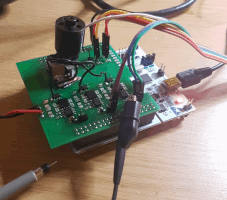
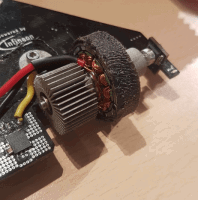
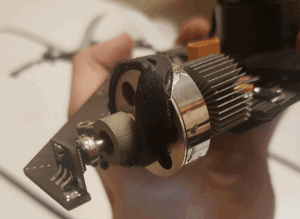
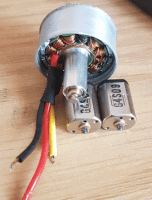
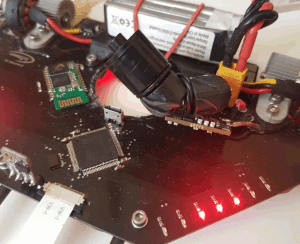
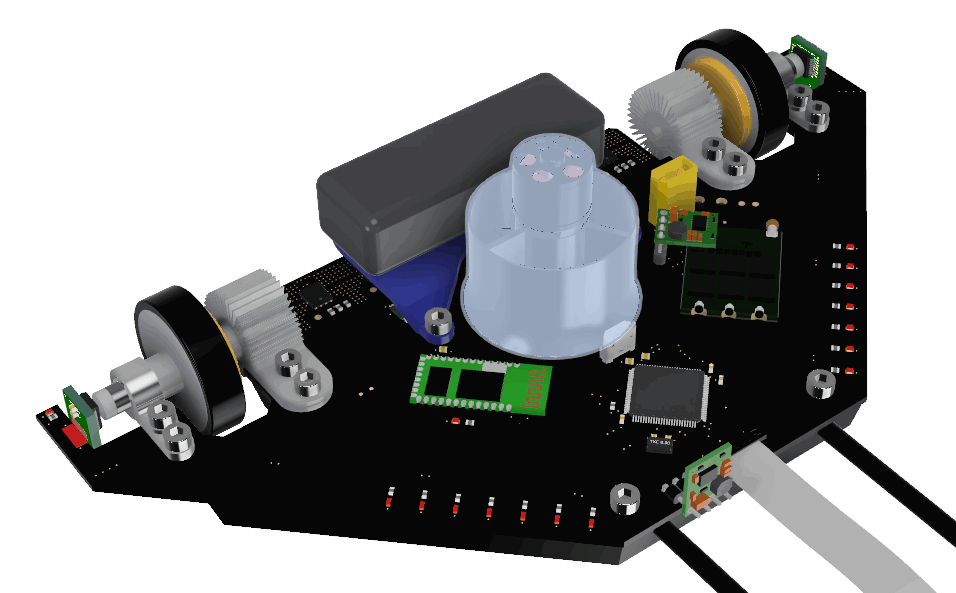
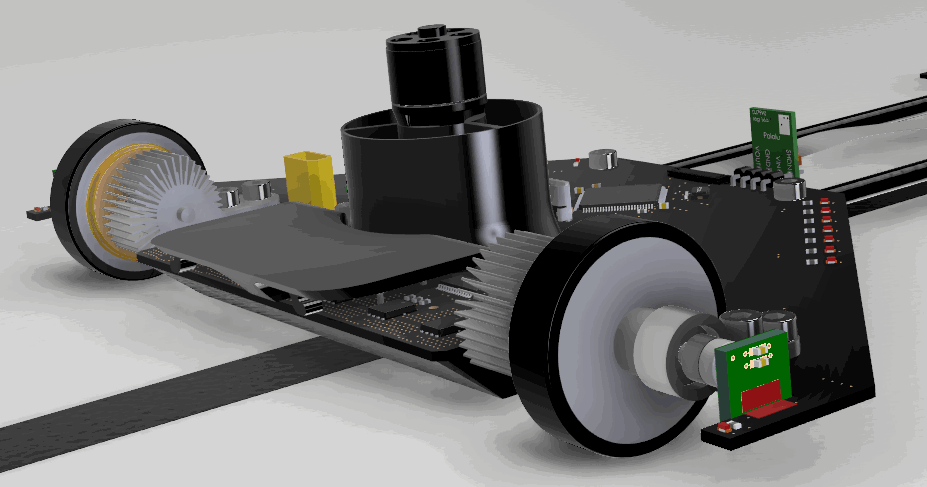
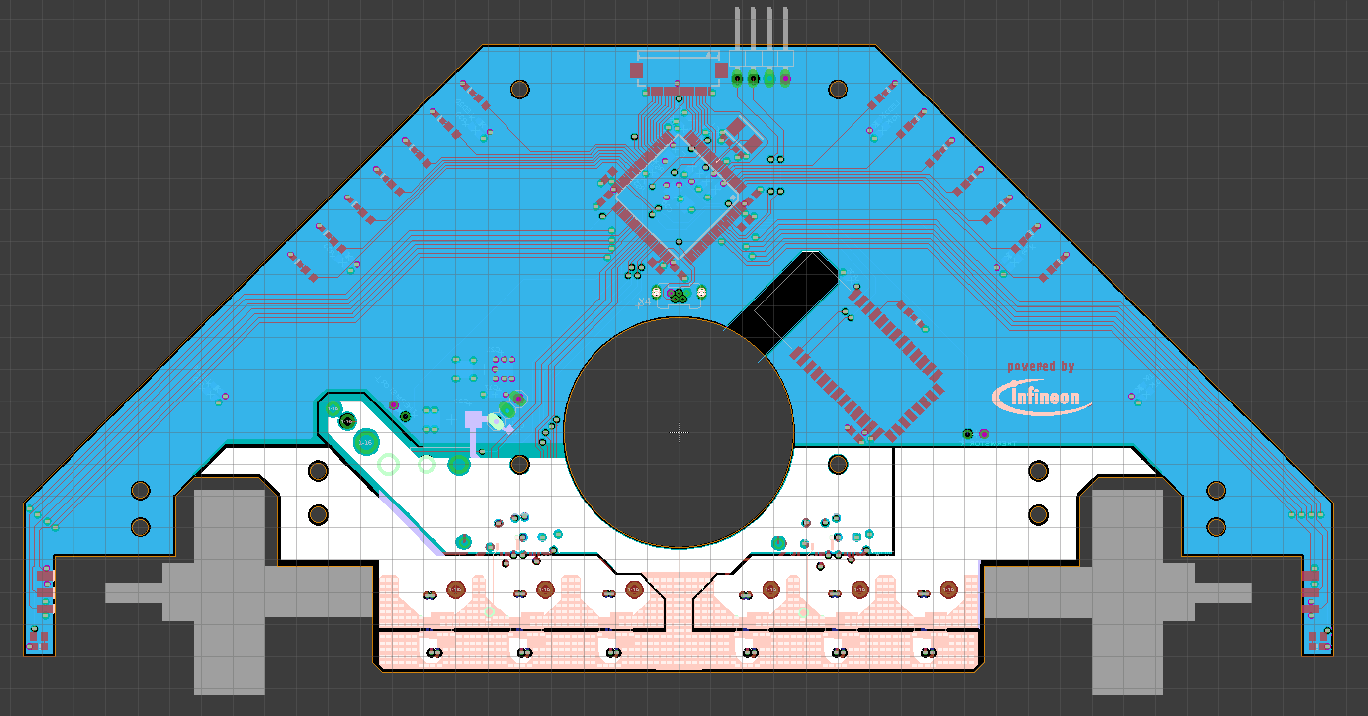
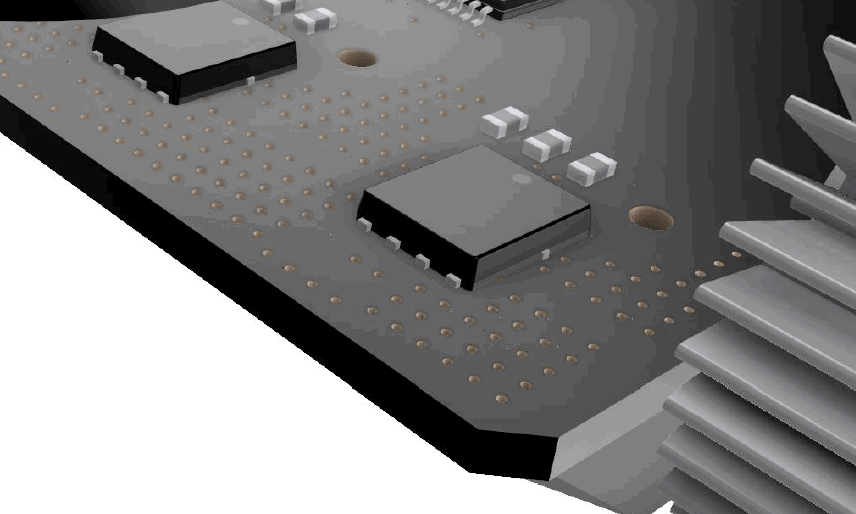
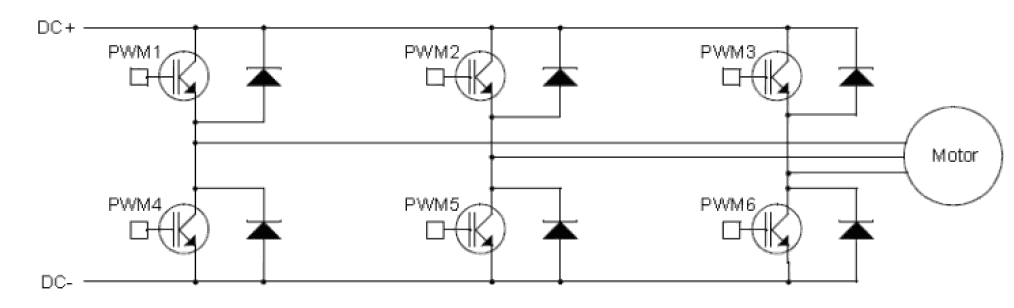
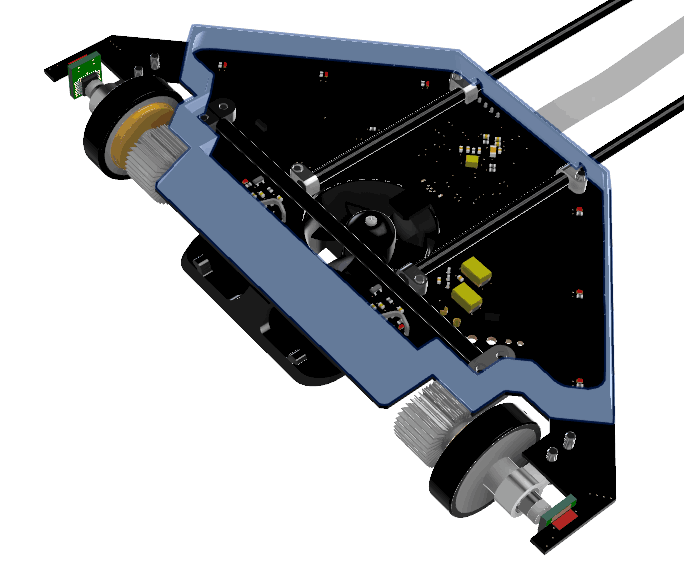
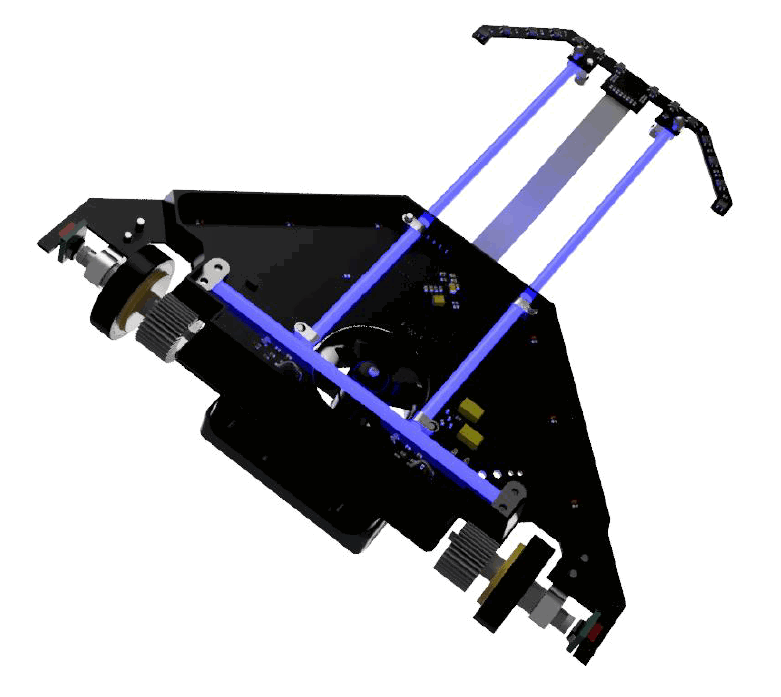
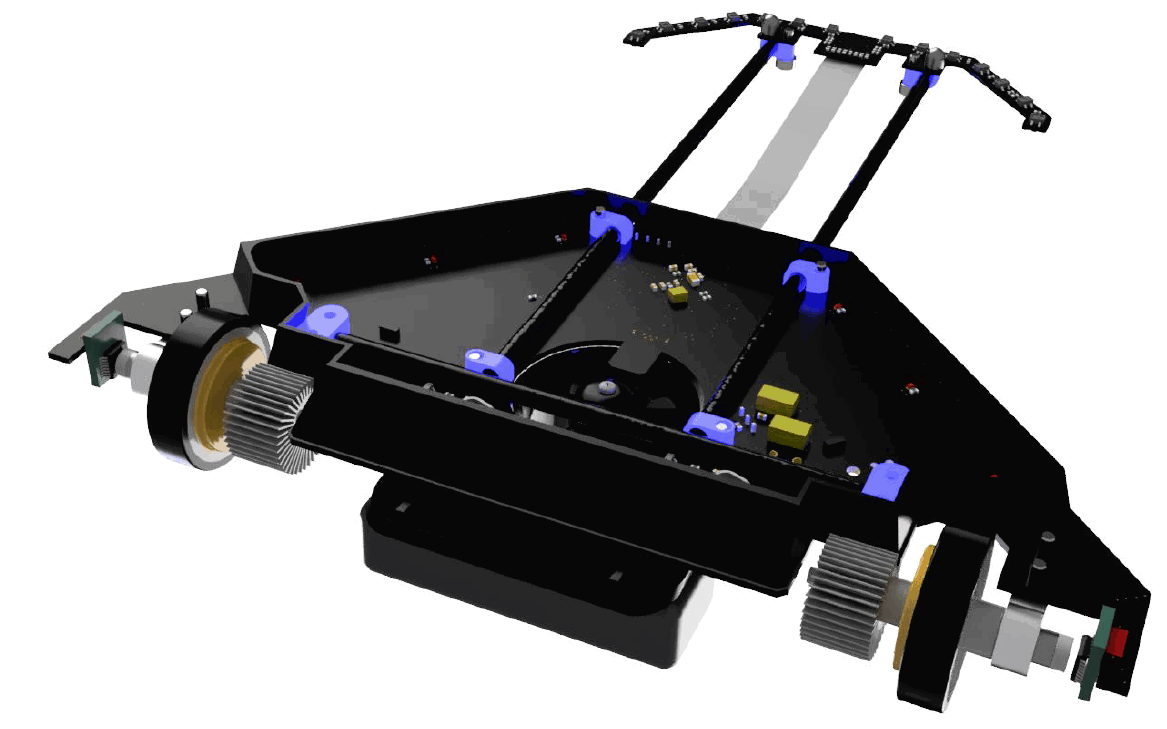
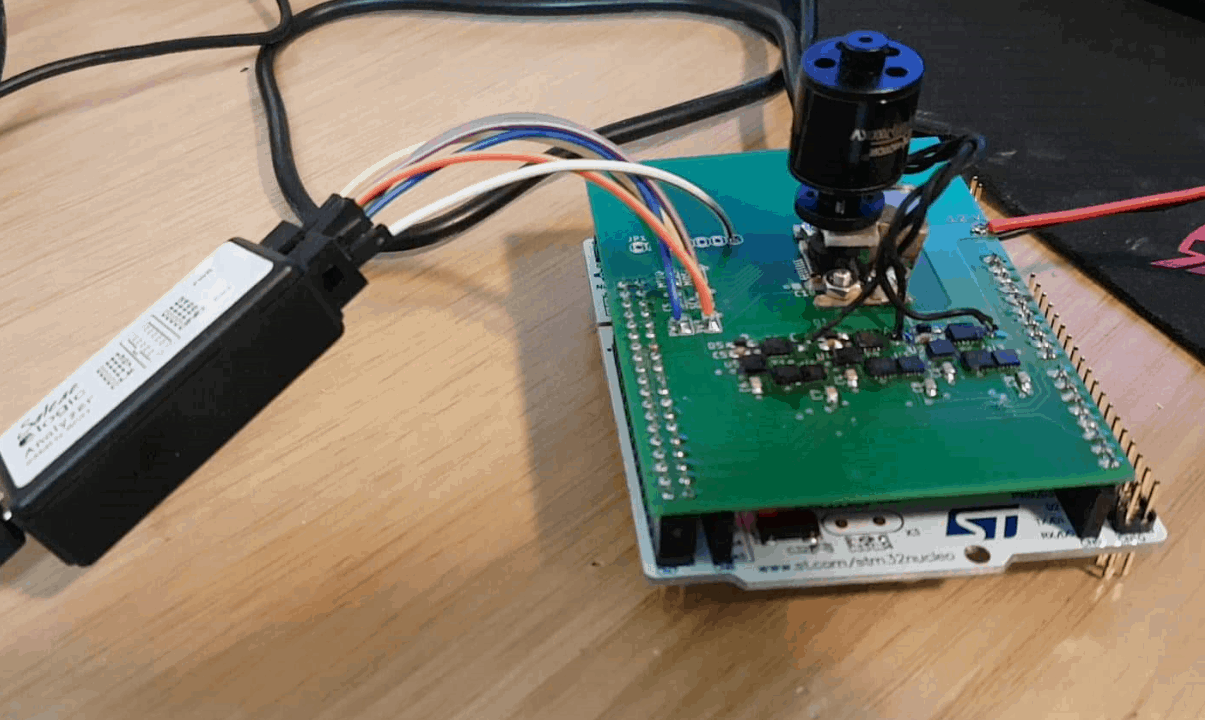
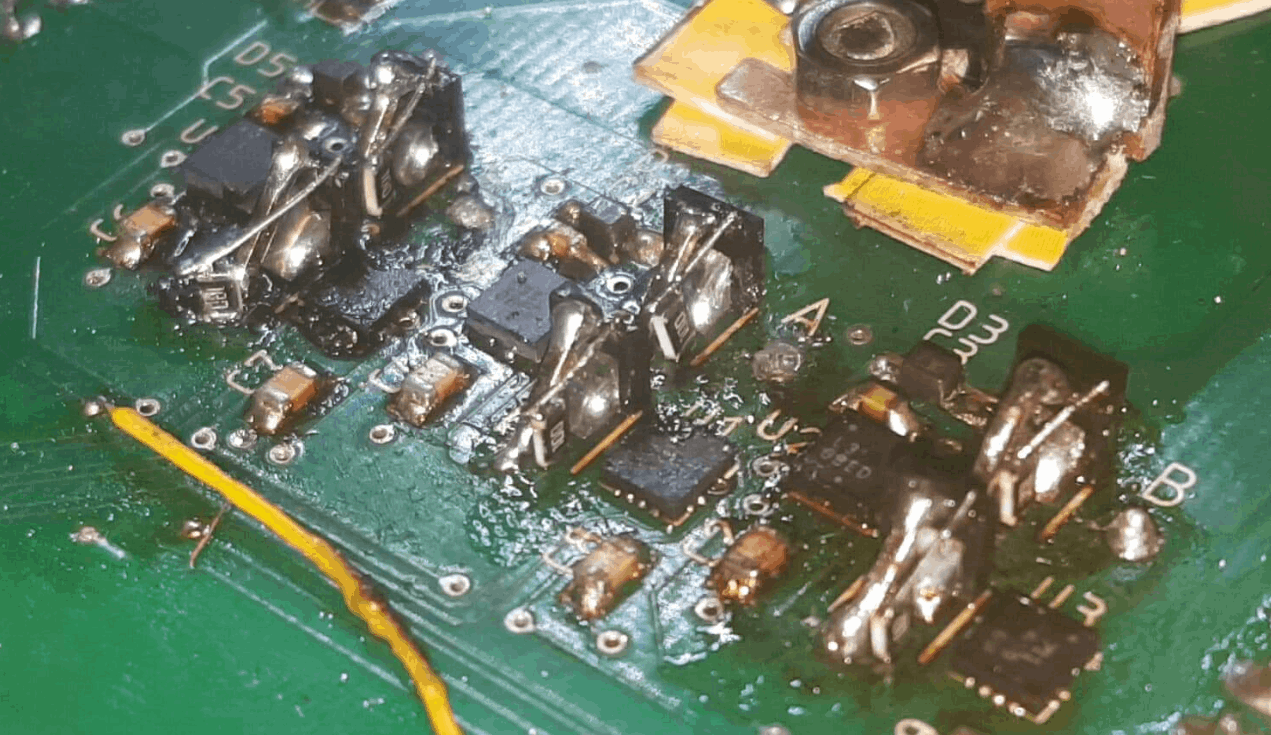
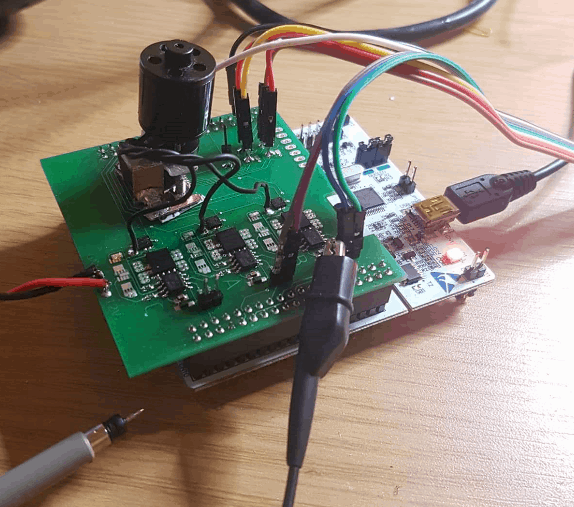
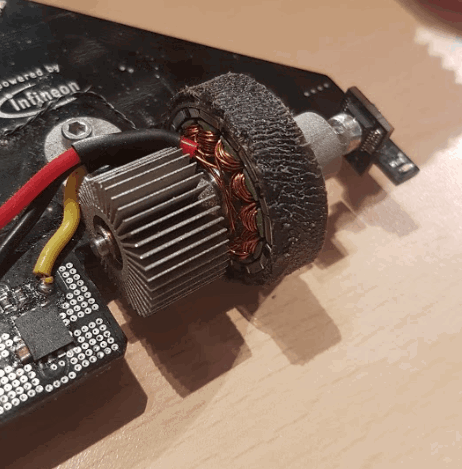
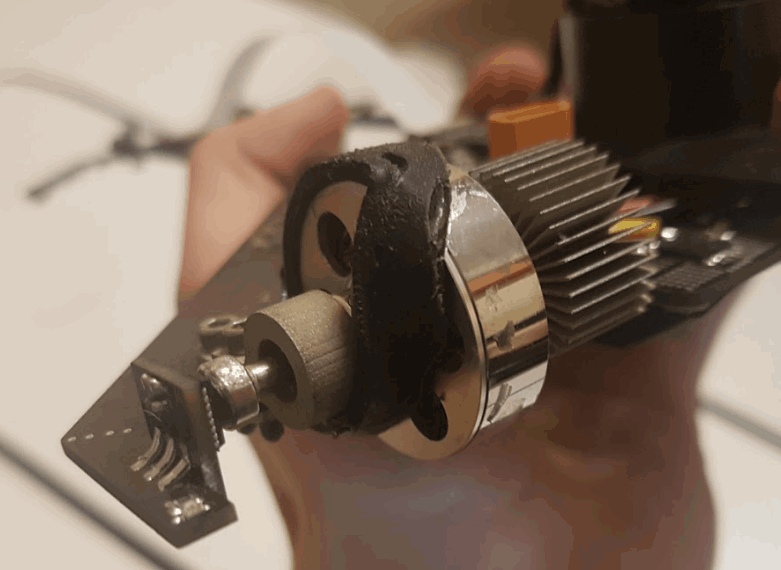
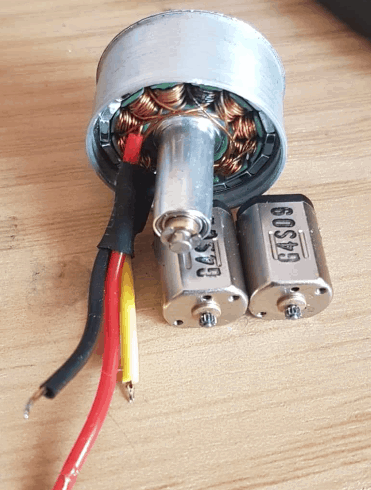
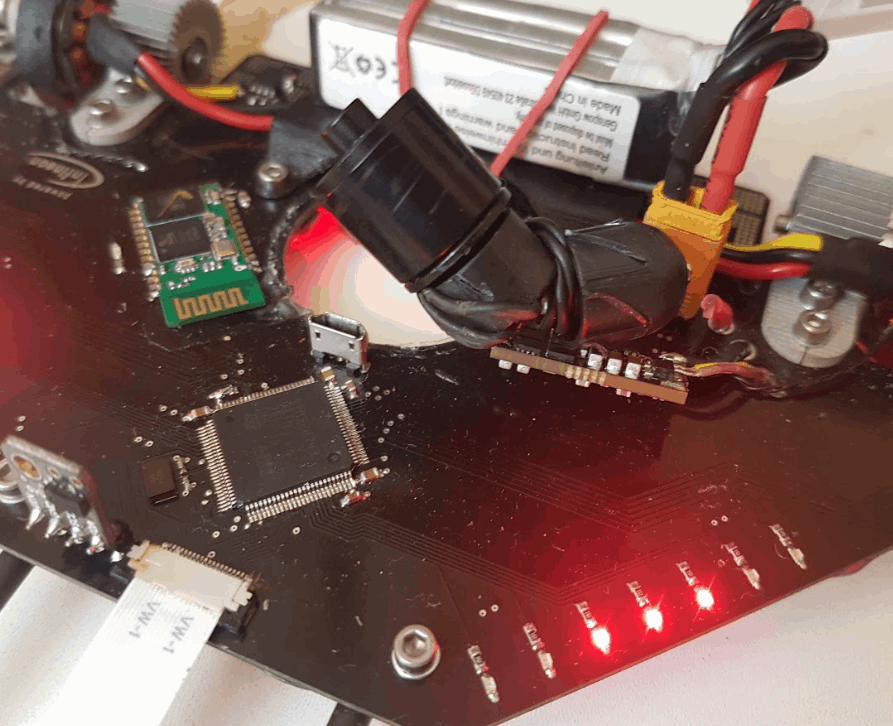
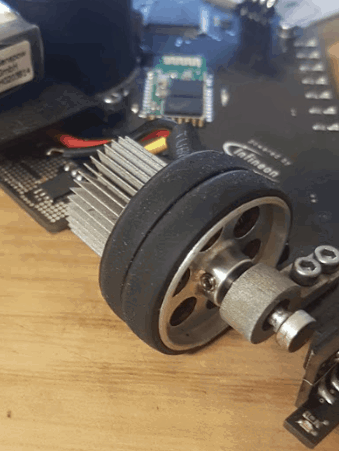
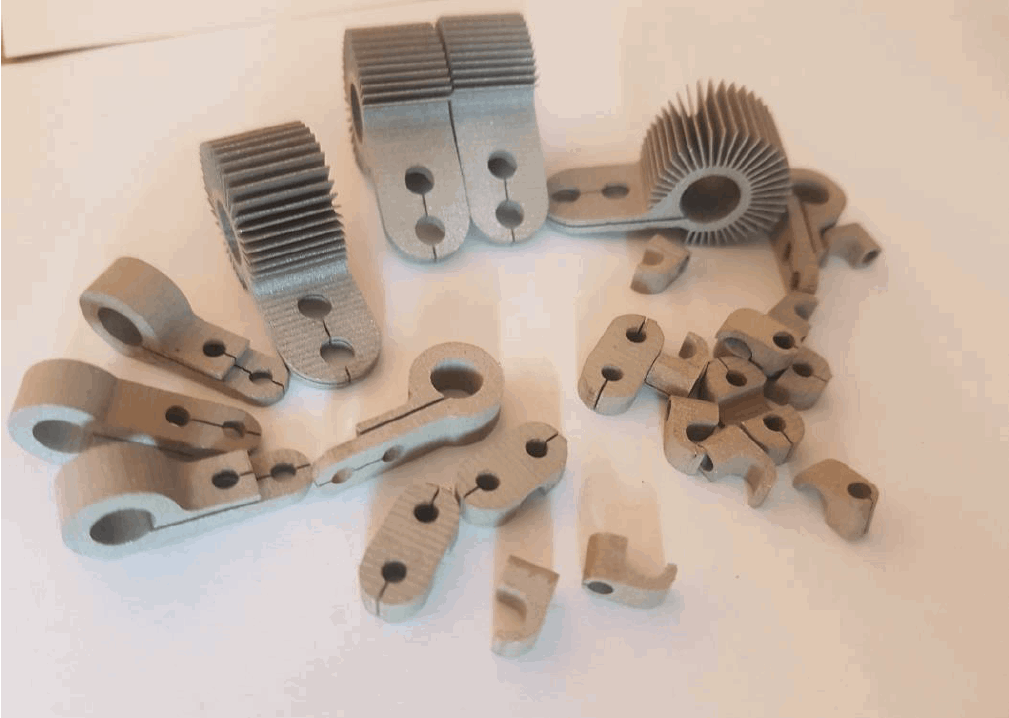
Cześć, od kiedy opisałem swojego robota Pika na forum, minęło już troszkę. W tym czasie zdążyło powstać kilka kolejnych konstrukcji, zarówno bez turbiny jak i z turbiną. W tym poście chciałbym przybliżyć Wam moją najnowszą konstrukcję - robota klasy Linefollower Turbo o nazwie Spark. Głównym założeniem, jakie przyświecało mi podczas projektowania była chęć nauczenia się wektorowego sterowania silnikami BLDC oraz wykorzystanie właśnie takich silników jako napęd bezpośredni w robocie. Podczas opisu założeń konstrukcyjnych posłużę się modelem 3D robota. Jak można zauważyć na powyższym zdjęciu, ogólna konstrukcja nie różni się od znanego wszystkim standardu. Na przedzie delikatna i lekka listewka z 14 czujnikami linii KTIR0711S. Centralnie umieszczona turbina QX-Motor 14000 kv o średnicy 30 mm. Dwa silniki hexTronik 1300KV umieszczone w tylnej części w taki sposób, aby możliwe było uniesienie przodu celem wjazdu na pochylnię/rampę w kategorii Linefollower Enchanced. Sercem robota jest mikrokontroler STM32H743VIT6. Jest on oparty na rdzeniu Cortex M7 oraz taktowany z prędkością 400 MHz. Wybór tak potężnej jednostki sterującej podyktowany był chęcią wydajnego obliczania komutacji sterowania wektorowego dla każdego z silników jezdnych oraz realizacji algorytmu jazdy przy pomocy tylko jednej jednostki. Dodatkowo tak szybki mikrokontroler pozwolił na zatuszowanie moich niedoskonałości w optymalizacji kodu Głównym elementem konstrukcyjnym jest 4-warstwowy obwód drukowany. W trakcie projektowania falowników do sterowania silnikami powstały dwa prototypy, w których miałem problem z przegrzewającymi się tranzystorami dlatego w docelowym PCB zastosowałem aż 4 warstwy. Dodatkową zaletą takiego obwodu jest jego większa odporność na zakłócenia elektromagnetyczne. Podświetlony obszar to miedź na wszystkich czterech warstwach połączonych setkami przelotek chłodząca tranzystory. Do sterowania każdym z silników wykorzystałem 6 tranzystorów w układzie pełnego mostka 3-fazowego. Posłużyły mi do tego półmostkowe układy BSG0813NDI za których udostępnienie serdecznie dziękuję firmie Infineon (oraz za tranzystory i drivery, które spaliłem w prototypach - ok 60 sztuk, nie od razu Rzym zbudowano ) Ostatecznie jako drivery wykorzystane zostały układy MIC4607-2 ze względu na możliwość sterowania całym mostkiem przy pomocy tylko jednego układu. Do odczytywania pozycji wirnika służy enkoder magnetyczny AMS5045B. Całość zasila akumulator Li-Po Tattu 450mAh 7.4V 75C. Za komunikację bezprzewodową odpowiada stary dobry moduł HC05. W celu zapewnienia pod robotem podciśnienia wywoływanego turbiną, zwiększającego nacisk kół na podłoże obrys uszczelniony został wydrukowaną w 3D ścianą. Do usztywnienia konstrukcji tak, aby opierała się ona o podłoże tylko kołami i ślizgaczami z przodu, posłużyły wałki węglowe o średnicy 4 mm. Do połączenia ze sobą poszczególnych elementów konstrukcyjnych wykorzystane zostały aluminiowe mocowania wykonane w technologii WEDM. Poniżej kilka fotek. Prototyp 1: Ratowanie prototypu 1 (rezystory bramkowe? A na co to potrzebne ) : Prototyp 2: Elementy konstrukcyjne: Pierwsze ruchy silnika: Poszukiwanie granic: Opona wykonana z poliuretanu 20': Aluminiowa felga wciśnięta na wirnik (Pololki dla skali): Zamontowana felga wraz z oponami (Mini-Z 20'): Turbina po dezintegracji (podczas jazdy eksplodowała): Przejazd w konkurencji Linefollower Drag podczas Bałtyckich Bitw Robotów 2018: Próby podczas RobotChallenge 2018 w Pekinie: Wnioski: Konstrukcja waży 250 g. To zdecydowanie za dużo, gdyż opony nie są w stanie zapewnić wystarczającej przyczepności na zakrętach i robot wpada w poślizg na zakrętach przez co osiągnięcie prędkości średniej na krętej trasie powyżej 3 m/s jest bardzo trudne. Zastosowanie silników BLDC jako direct-drive umożliwia rozpędzenie robota do ogromnych prędkości liniowych (15 m/s+) lecz aby posiadały one zadowalający moment przy niskich obrotach konieczny do gwałtownych zwrotów muszą być duże i ciężkie. Lepiej zastosować małe silniki z przekładnią. Nowa konstrukcja już się tworzy! Dziękuję za przejrzenie albumu, który utworzyłem i zapraszam do zadawania pytań w komentarzach