Przeszukaj forum
Pokazywanie wyników dla tagów 'bezszczotkowy'.
Znaleziono 1 wynik
-
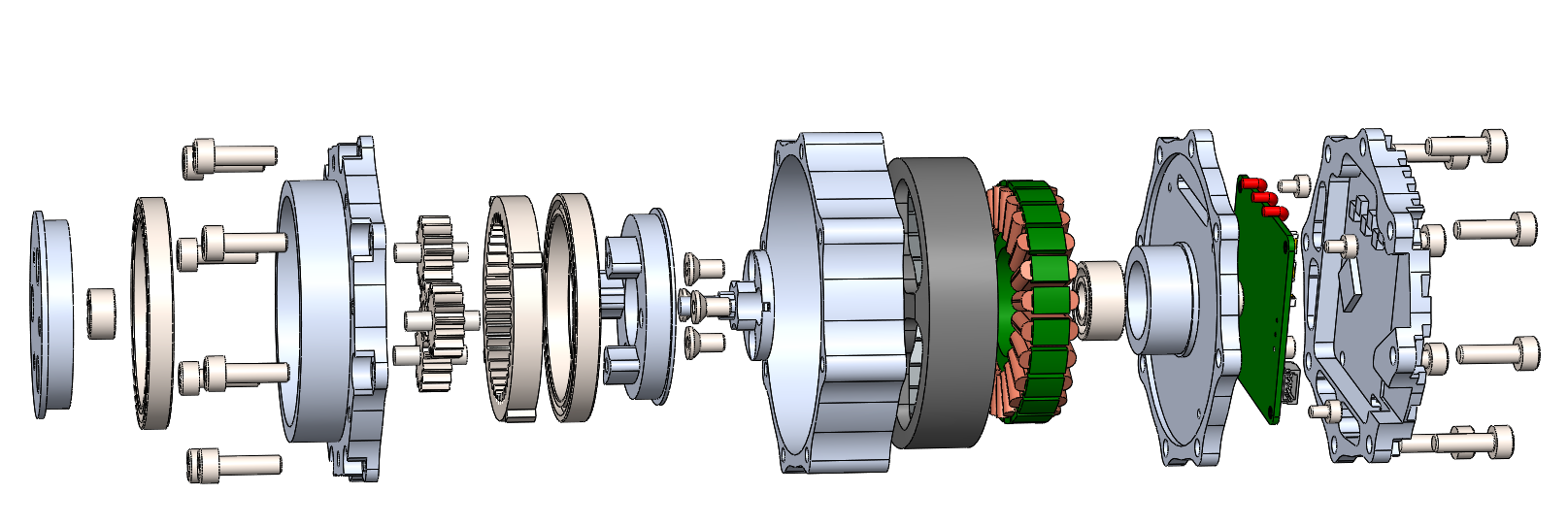
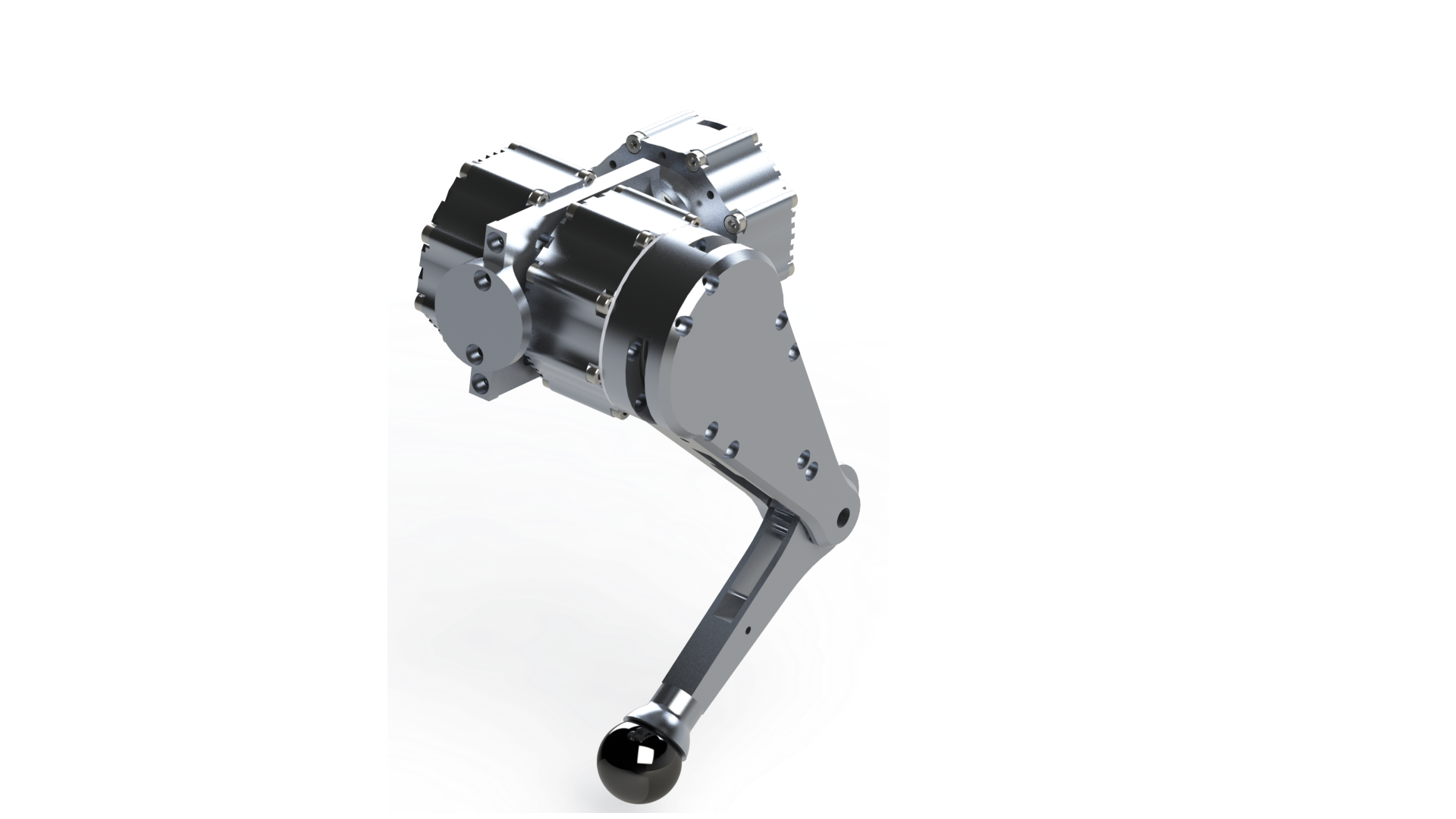
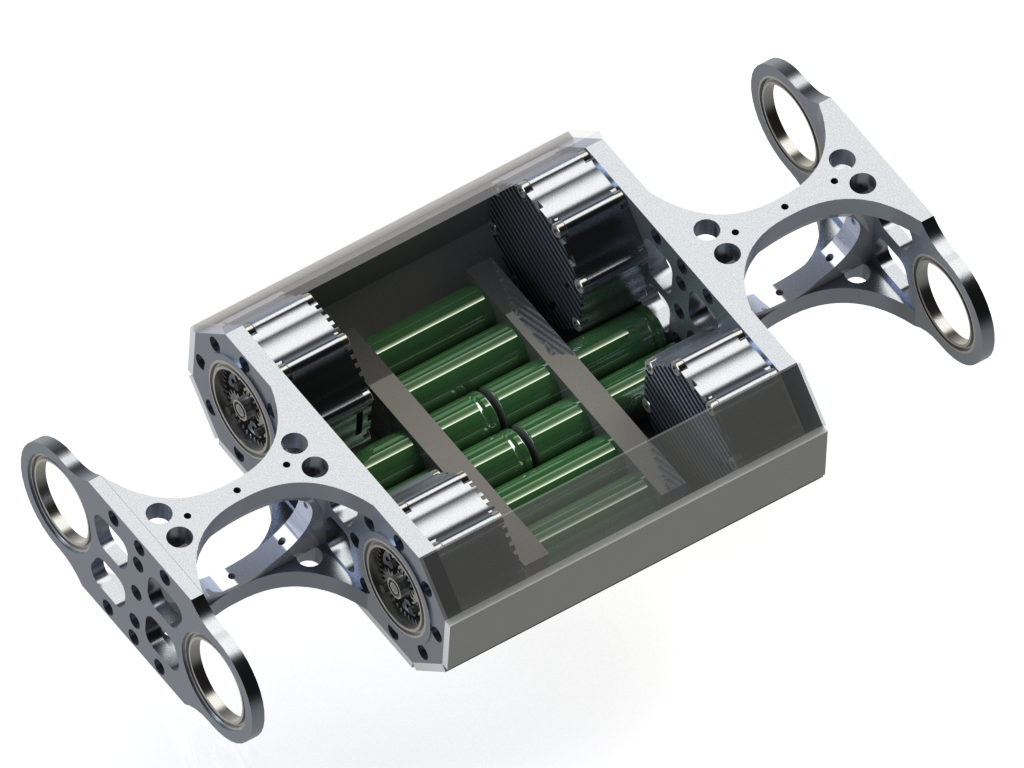
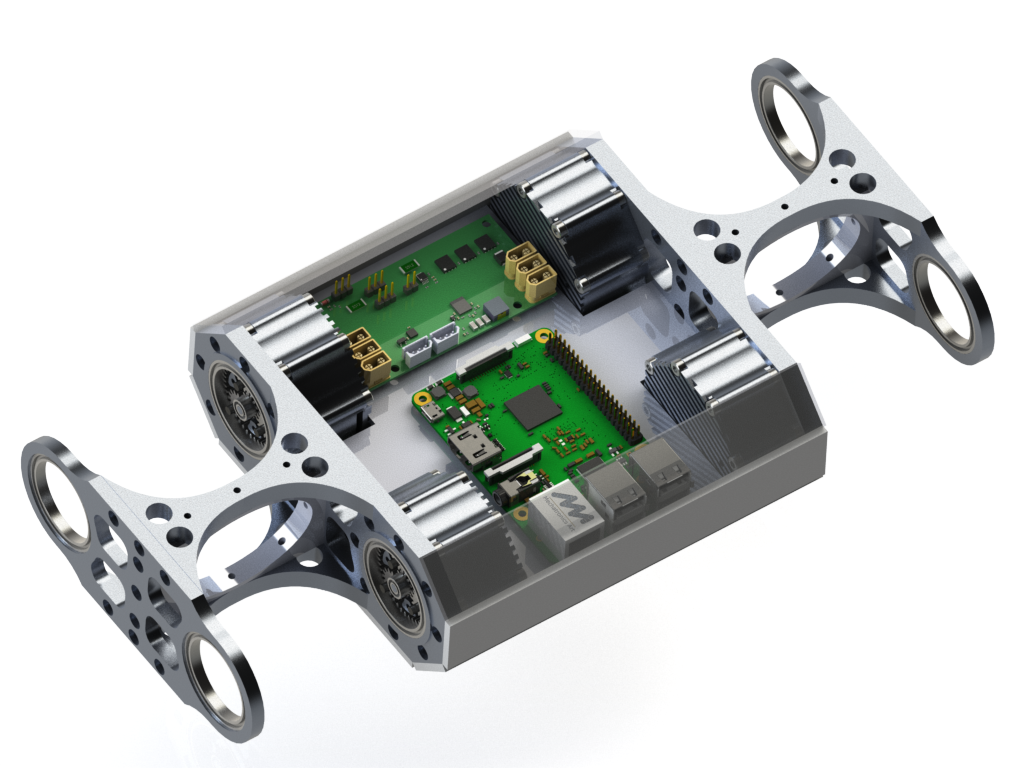
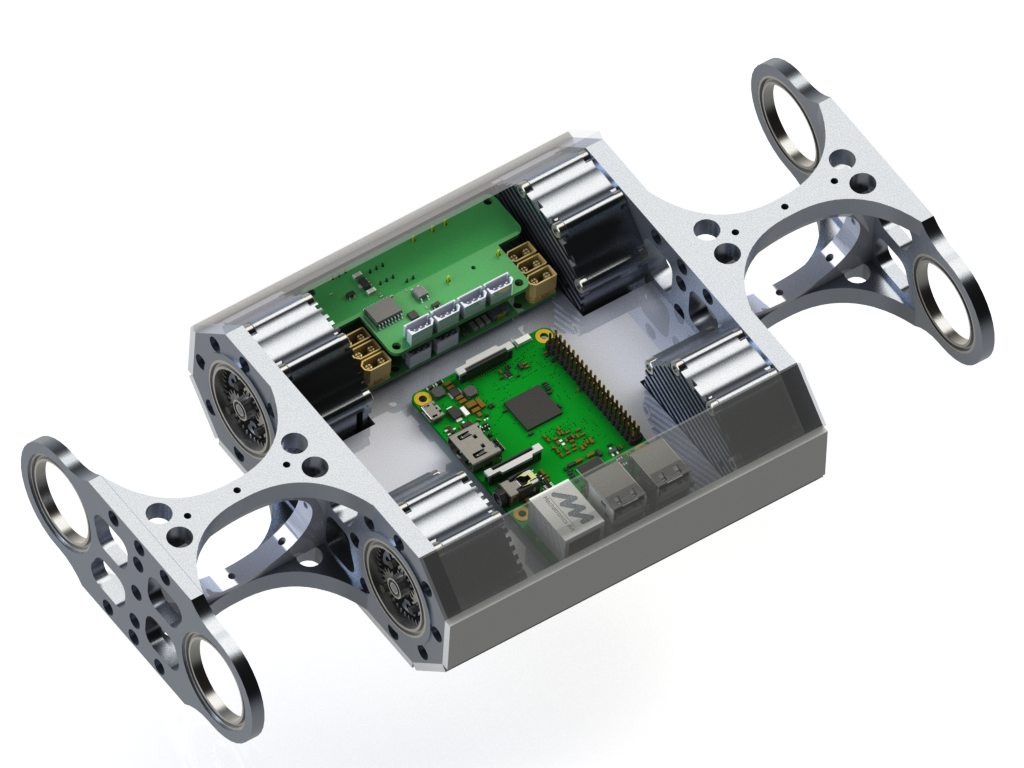
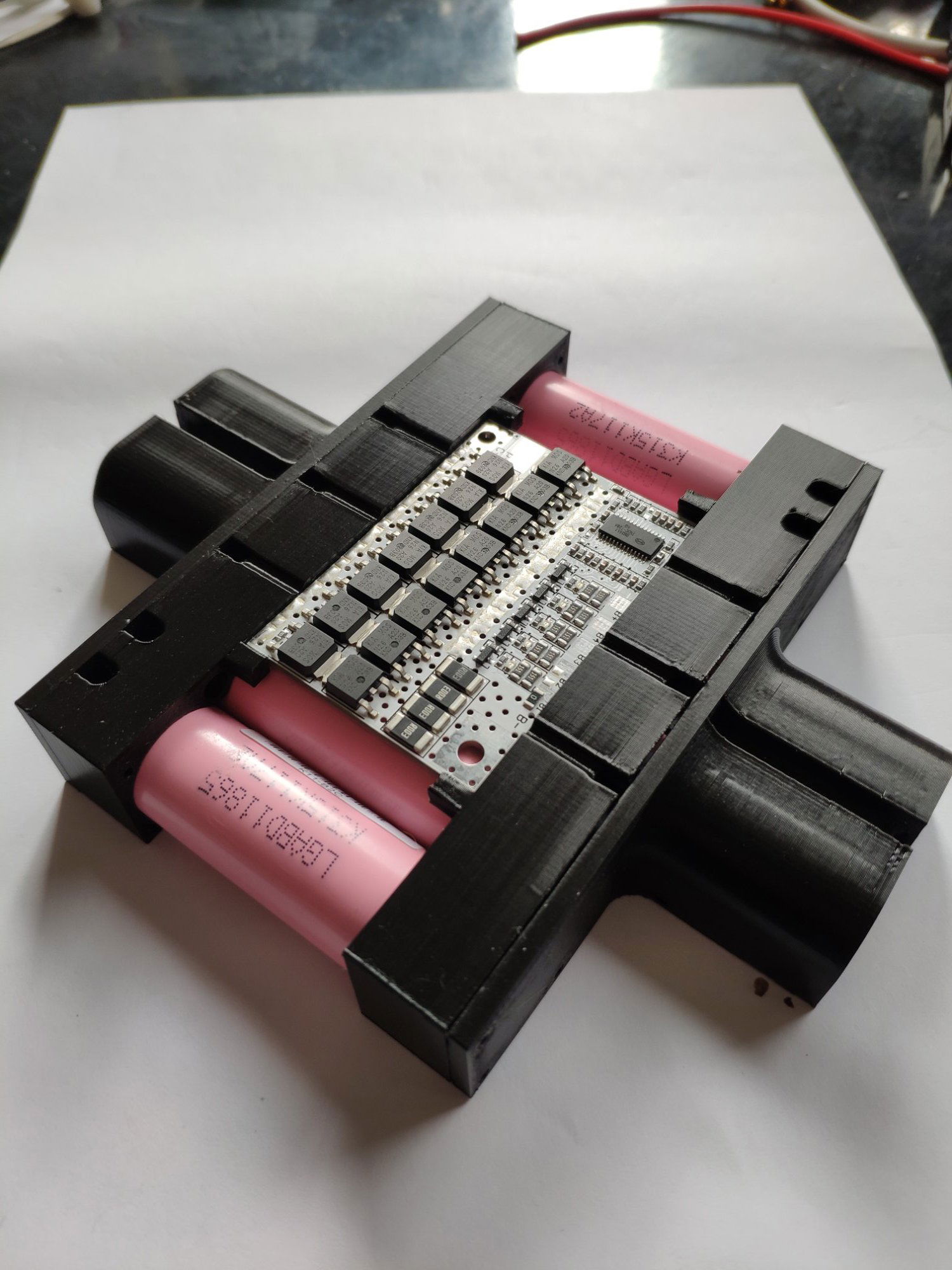
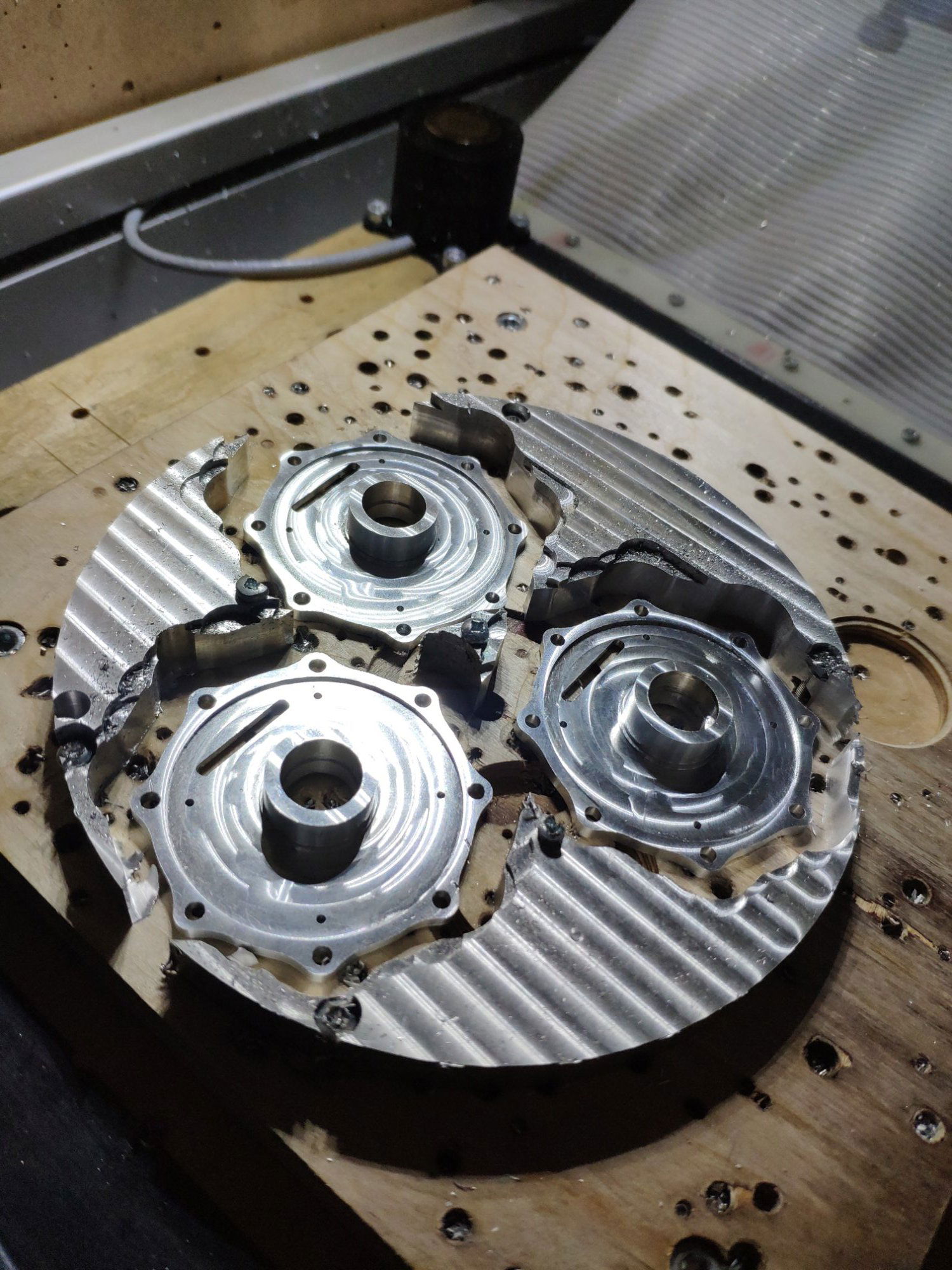
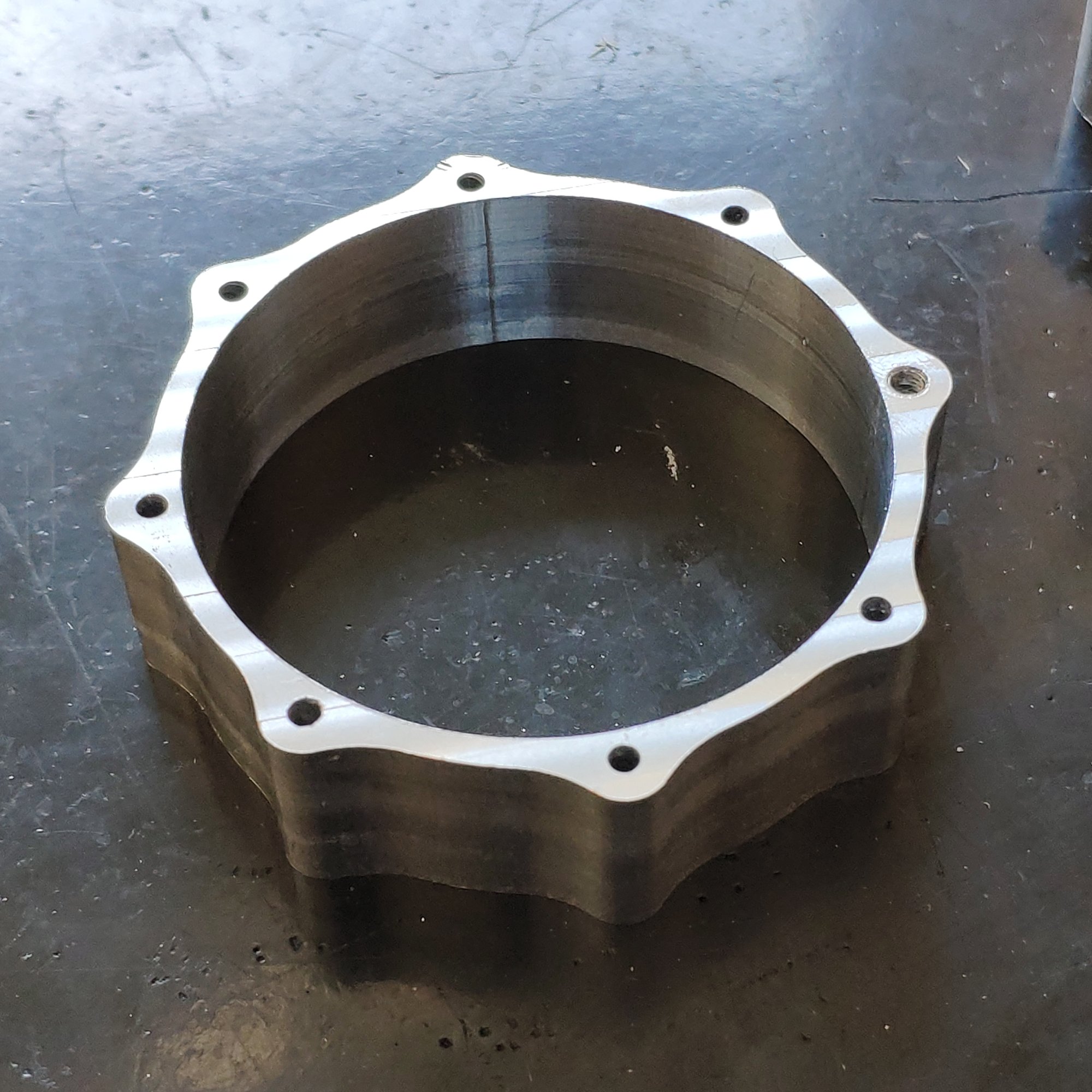
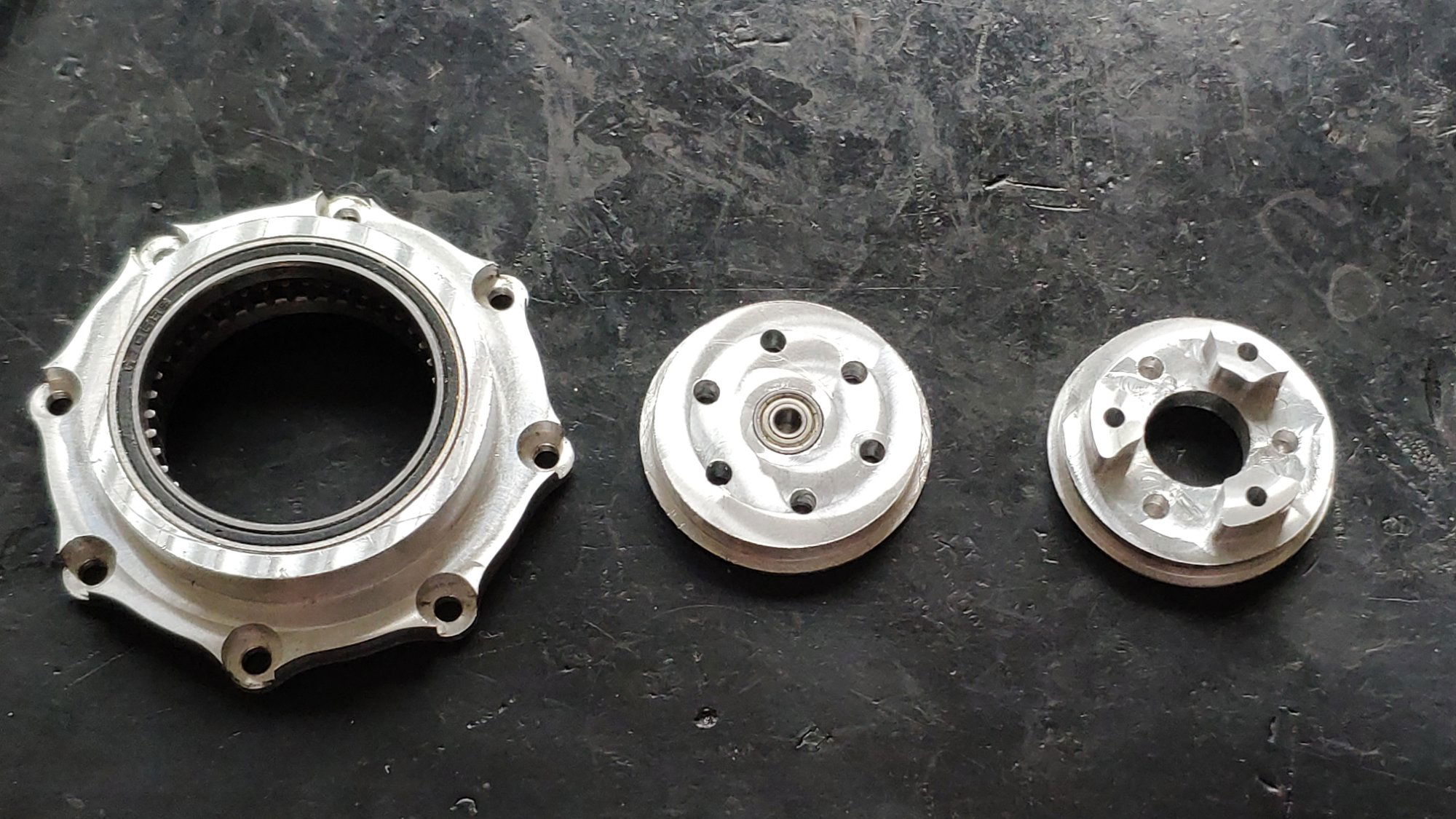
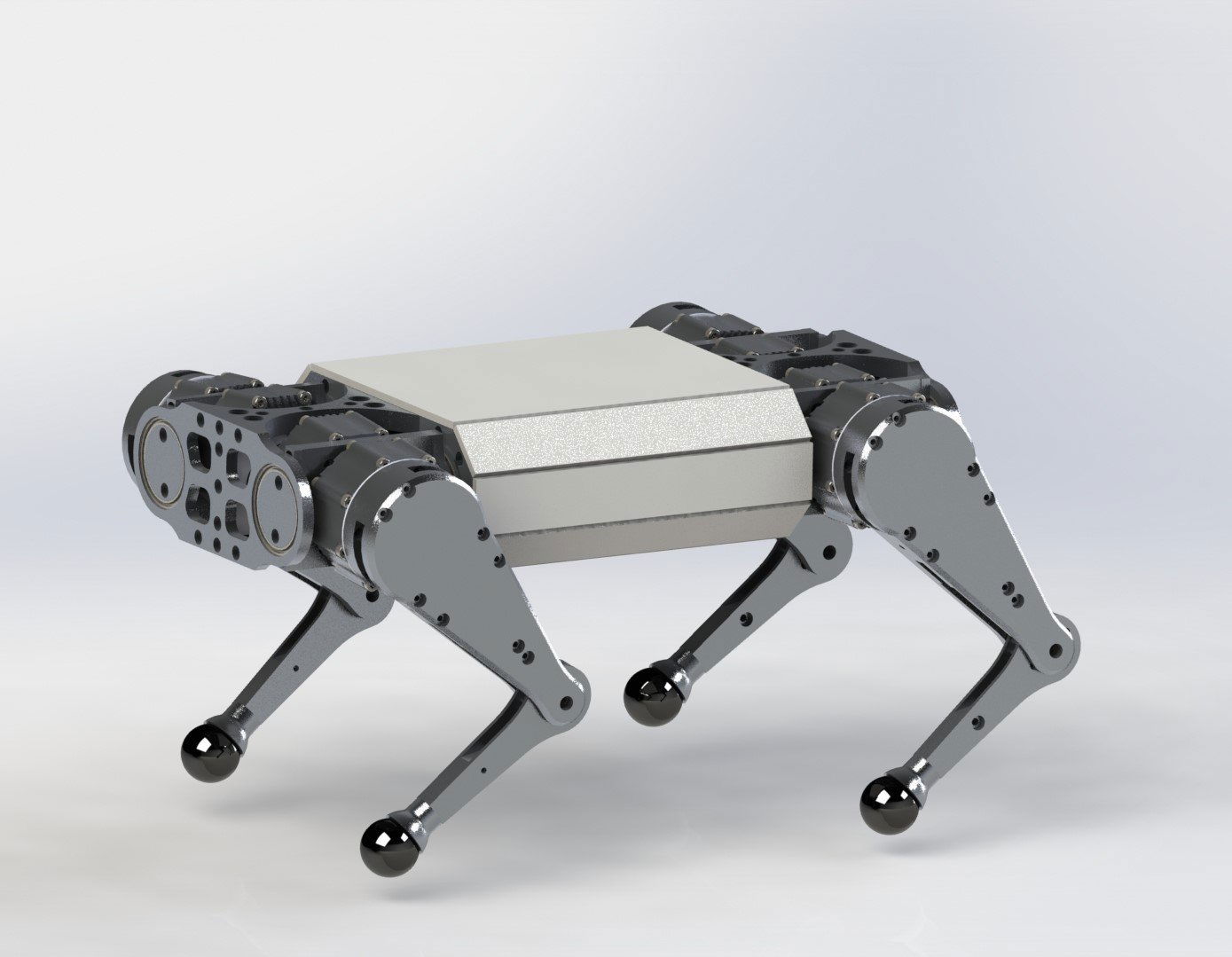
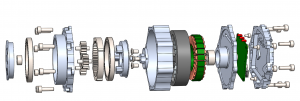
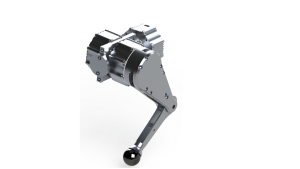
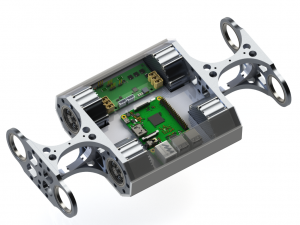
Cześć! Zgodnie z obietnicą z wątku krótkich worklogów zakładam temat z niewiele dłuższym opisem konstrukcji nad którą pracuję Jest to czteronożny robot kroczący zainspirowany konstrukcjami o wysokich zdolnościach ruchowych, które ostatnio stają się coraz bardziej popularne. W odróżnieniu od robotów kroczących opartych na serwach modelarskich, założyłem że w mojej konstrukcji użyję napędów bezszczotkowych, które odpowiednio wysterowane pozwalają na bardziej zaawansowane manewry. Przyjąłem, że robot powinien być, przede wszystkim, niewielki (max 5 kg) i posiadać modułowe napędy, które w razie awarii mogą zostać wymienione. Prace rozpoczęły się od projektu samego napędu. Pierwszym celem było zaprojektowanie miniaturowego sterownika silnika bezszczotkowego. Sterownik do zastosowań w robotach kroczących nie może być zwyczajnym kontrolerem modelarskim, ponieważ nie ma dobrego sprzężenia od pozycji i prądów fazowych silnika, przez co nie jest możliwe sterowanie momentem obrotowym, na którym najbardziej nam zależy. W takim wypadku należy użyć sterowania wektorowego (Field Oriented Control - FOC), które pozwala osiągnięcie maksymalnego momentu silnika przy szerokim zakresie prędkości (nawet zatrzymanym wale), a także na dużą dynamikę sterowania momentem obrotowym. Całe sterowanie, rodzaje silników bezszczotkowych oraz ich dobór to temat-rzeka, ale myślę, że takie krótkie wyjaśnienie wystarczy na chwilę obecną . Krótko mówiąc nie mogłem uniknąć konieczności stworzenia własnego sterownika. Po kilku iteracjach (tematem sterowania silników bezszczotkowch zajmuję się już jakiś czas) powstał sterownik widoczny niżej, który zamocowany jest w każdym napędzie. Sterownik wyposażony jest w mikrokontroler, enkoder magnetyczny, trzy półmostki, zintegrowany sterownik tranzystorów, oraz transceiver CANFD. Wspólną cechą większości napędów robotów kroczących (w formie, którą przyjąłem) jest to, że napędy nie są samohamowne i bardzo łatwo możemy poruszyć napędem od strony wyjścia. Zapewnia to możliwość kontroli momentu obrotowego na podstawie odczytywanych prądów fazowych silnika bezszczotkowego, bez konieczności stosowania zewnętrznych czujników sił czy momentów na samej kończynie. Z tym założeniem bezpośrednio związana jest przekładnia o niskim przełożeniu, zazwyczaj mniejszym niż 9:1. Ja akurat miałem pod ręką 14 sztuk przekładni do wkrętarek akumulatorowych z przekładnią 4.5:1 (pierwszy stopień), które zdecydowałem się wykorzystać w projekcie. Moduł został zaprojektowany w ten sposób, że w razie potrzeby możliwa jest wymiana części przekładni na inną (o innym przełożeniu). Część mechaniczna napędu to kilka frezowanych części aluminiowych, które skręcone są ze sobą tworząc „kanapkę”. Można wyróżnić trzy główne sekcje widoczne na rysunku poniżej, czyli sekcję przekładni, silnika i elektroniki sterującej. Wszystkie elementy zostały wykonane na własnej roboty frezarce trzyosiowej. Byłem zmuszony do złożenia takiej maszyny na potrzeby tego projektu, ze względu na trudną dostępność do obrabiarek na uczelni. Jestem z niej bardzo zadowolony, ponieważ mogę bardzo szybko prototypować części w aluminium. Poniżej wrzucam kilka zdjęć frezowanych części napędu: Timelapse z frezowania: A tak wygląda sama maszyna: Gotowy napęd waży ok. 210 g, jest w stanie wytworzyć 0.875 Nm momentu ciągłego (ograniczonego maksymalną temperaturą równą 65*C) lub 3 Nm momentu szczytowego (przez kilka sekund). Poniżej filmik demonstrujący działanie napędu w trybie tłumik-sprężyna (PD): Zazwyczaj na nogę robota przypadają dwa lub trzy napędy. Ja wybrałem opcję z trzema napędami, tak aby każda noga miała duże pole robocze. W takiej konfiguracji jestem w stanie sterować stawem kolanowym, udowym i biodrowym. Napędy umieszczone są jak najbliżej wolno poruszającego się torsu, aby zmniejszyć momenty bezwładności kończyny, która dzięki temu może przyspieszać o wiele szybciej. Niedawno skończyłem pierwsze testy kończyny na stanowisku z szyną liniową, gdzie noga może swobodnie poruszać w kierunku góra-dół. Założeniem było wykonywanie powtarzających się skoków, które znacznie obciążają przekładnie napędów, ale także części drukowane kończyny. Noga, którą zbudowałem waży ok. 800 g i jest w stanie podskoczyć na 15 cm mierząc 20 cm w wyprostowanej pozycji. Poniżej filmik z testu: Całkowicie noga wykonała ponad tysiąc skoków, dzięki czemu mogę być spokojniejszy o wytrzymałość napędów (chociaż chciałbym również sprawdzić w jakich sytuacjach będę w stanie uszkodzić napędy - jednak ze względu na długi czas wykonywania części muszę się wstrzymać z testami destrukcyjnymi na razie ). Aktualnie pracuję nad zasilaniem robota i płytkami PCB znajdującymi się w korpusie. Robot najprawdopodobniej zasilany będzie z 8 ogniw li-ion w konfiguracji 4S2P. Bateria będzie umieszczona na samym dole korpusu, pod elektroniką sterującą. Na elektronikę znajdującą się w torsie robota składają się moduły odpowiedzialne za dystrybucję zasilania do napędów oraz zasilania mikrokomputera (RPI), a także moduł będący nakładką na RPI, który wyposażony jest w moduł bezprzewodowej komunikacji, jednostkę IMU + magnetometr, oraz transceivery CANFD. Na renderach poniżej brakuje jeszcze płytki-nakładki na RPI: Myślę, że tyle opisu na razie wystarczy Starałem się wszystko opisać w miarę prostym językiem, więc wybaczcie skróty myślowe i bardzo pobieżne opisy niektórych tematów. Niestety większość z nich jest tak rozległa, że ciężko byłoby tutaj wszystko zawrzeć. Mimo to mam nadzieję, że opis przypadł Wam do gustu i jeśli macie jakieś pytania piszcie śmiało Projekt dokumentuję dosyć aktywnie na Instagramie: https://www.instagram.com/klonyyy/ A trochę mniej aktywnie na Hackaday'u: https://hackaday.io/project/175753-wolfie I moim blogu, na którym znajdziecie także krótki opis z budowy frezarki: https://pwwprojects.blogspot.com/ Pozdrawiam, Piotrek









- 15 odpowiedzi
-
- 22
-

-
- robot kroczący
- bezszczotkowy
- (i 1 więcej)