Przeszukaj forum
Pokazywanie wyników dla tagów 'rasp pi'.
Znaleziono 1 wynik
-
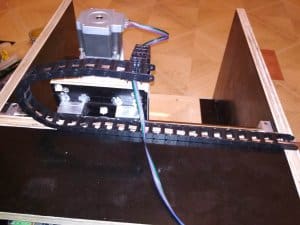
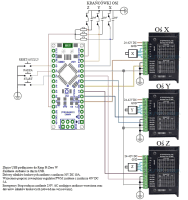
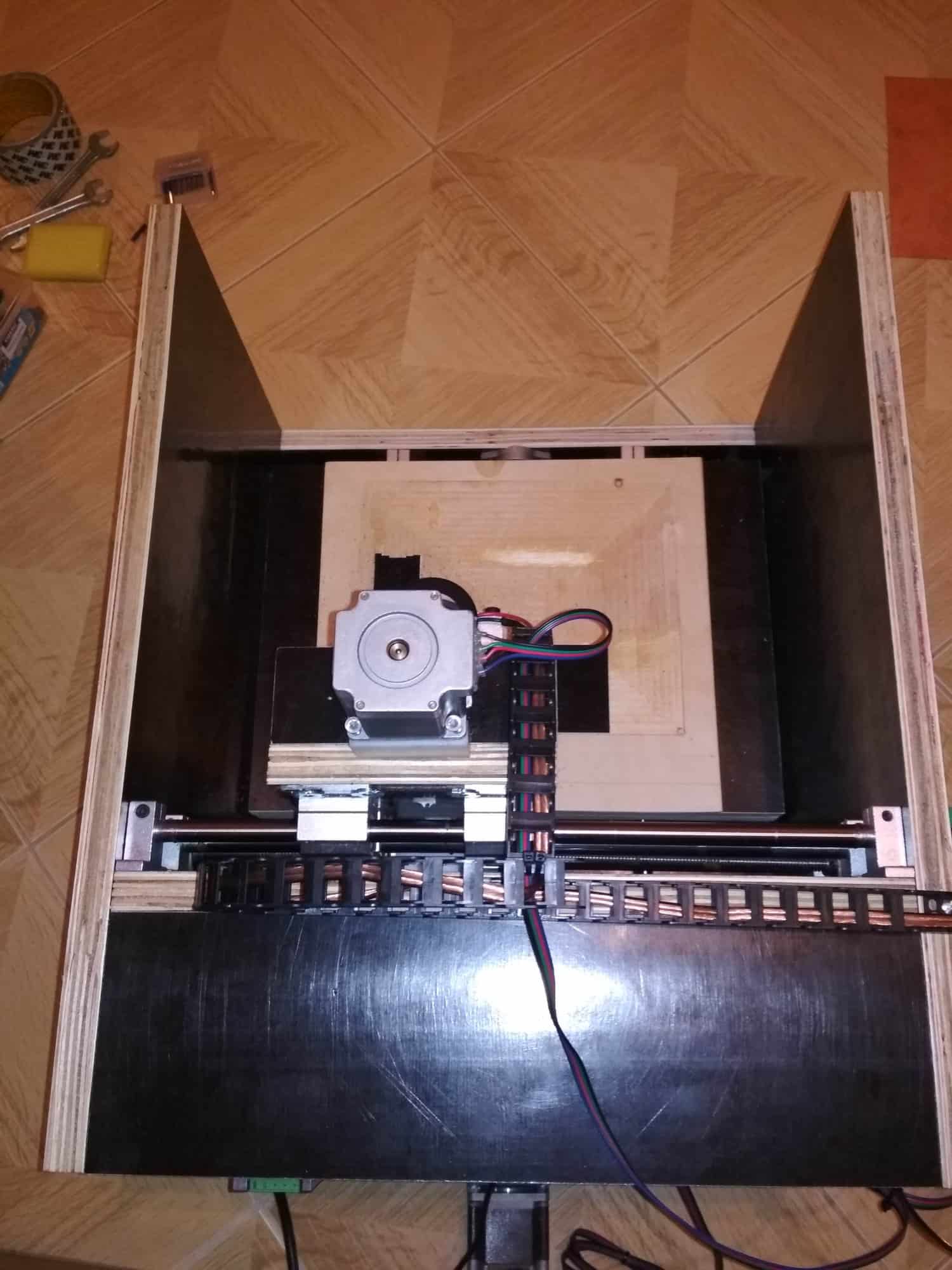
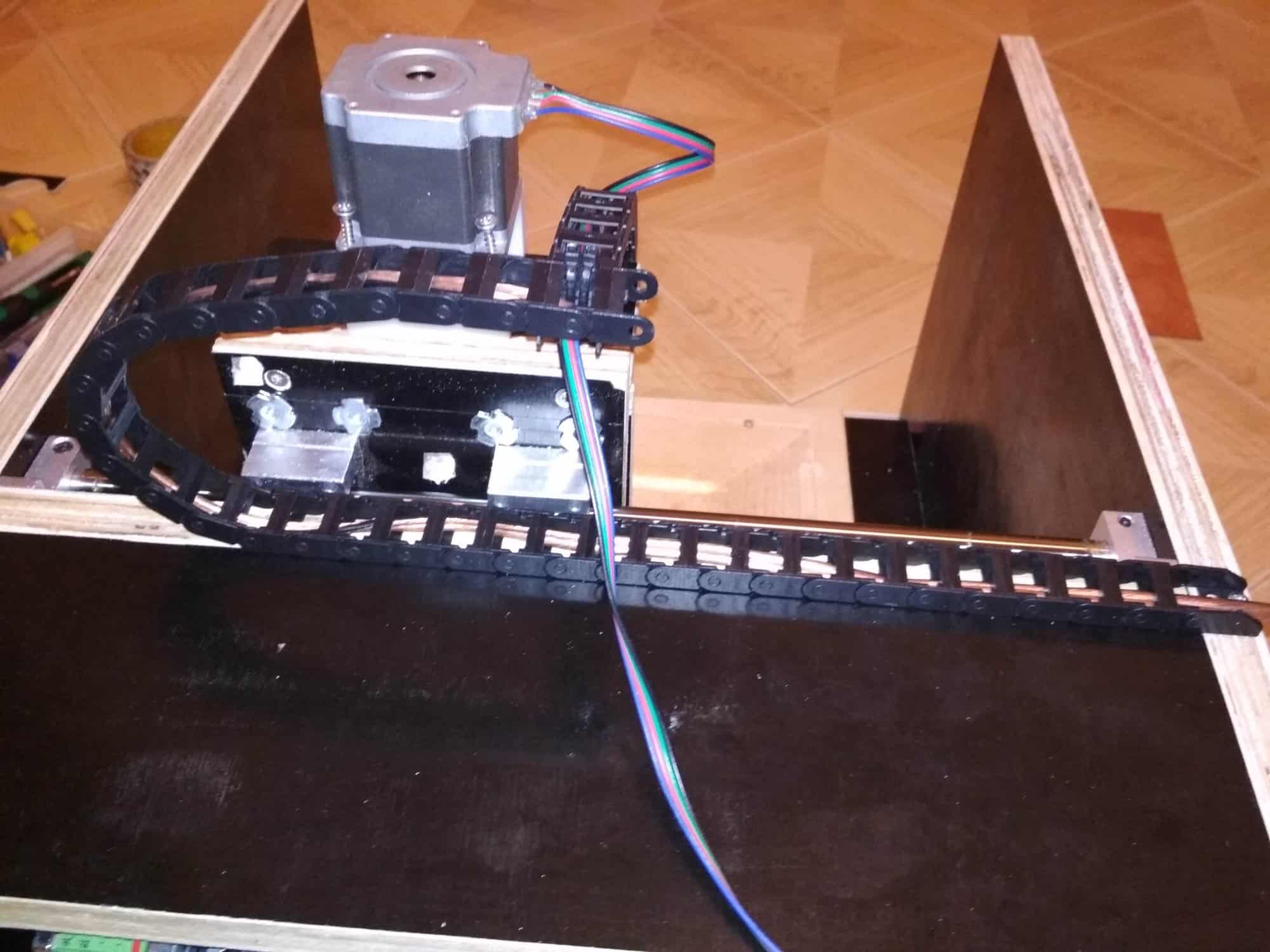
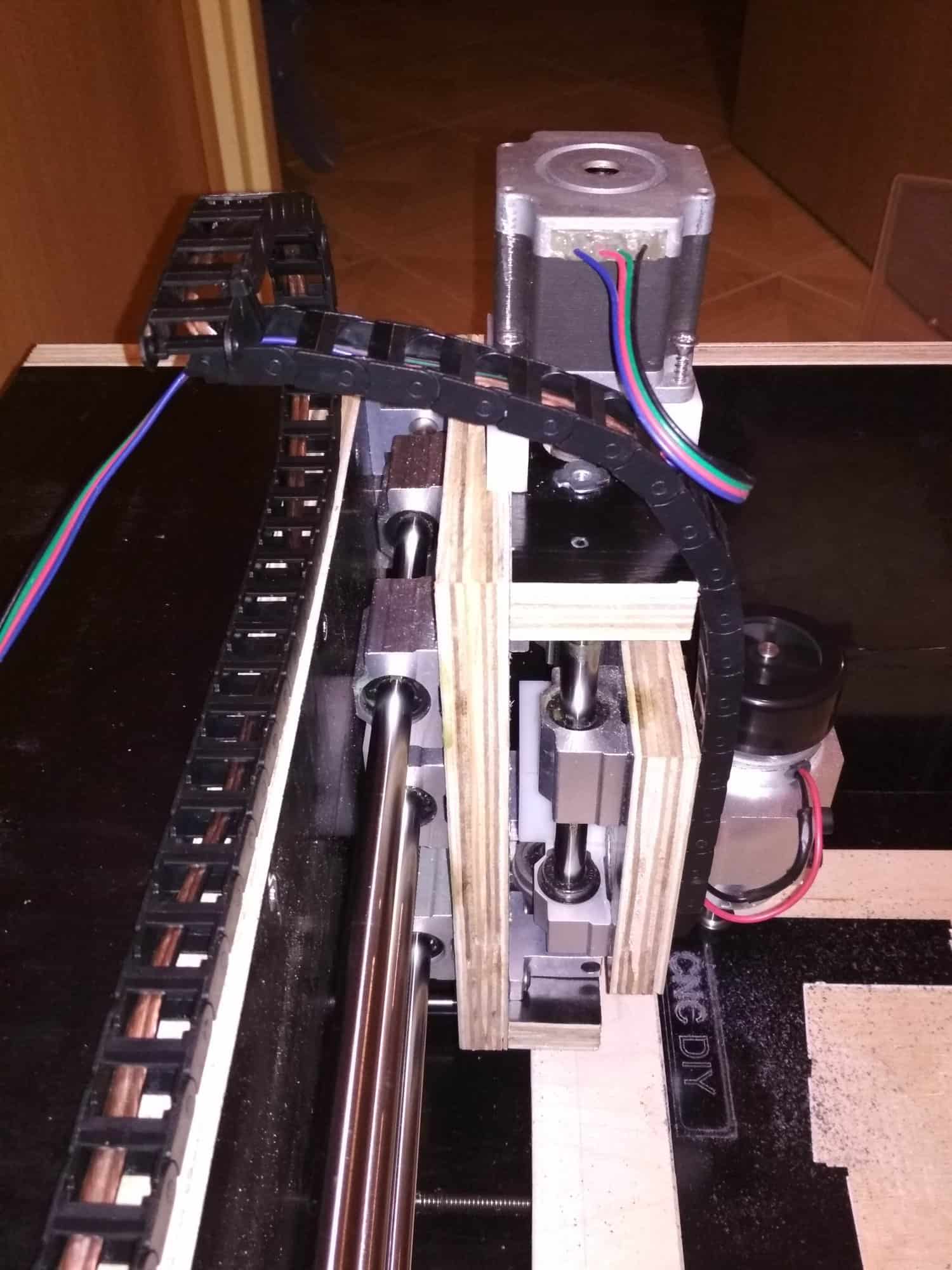
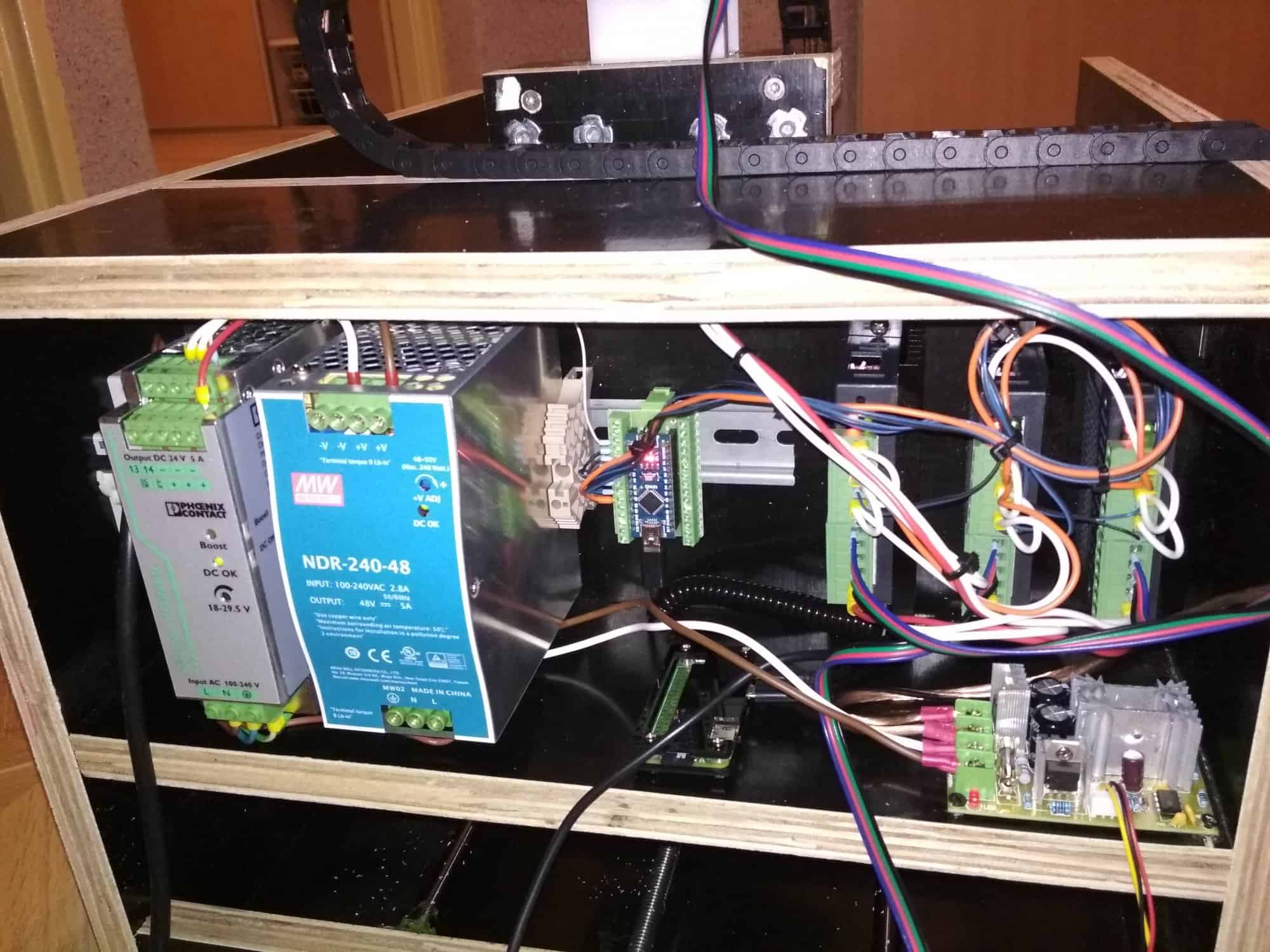
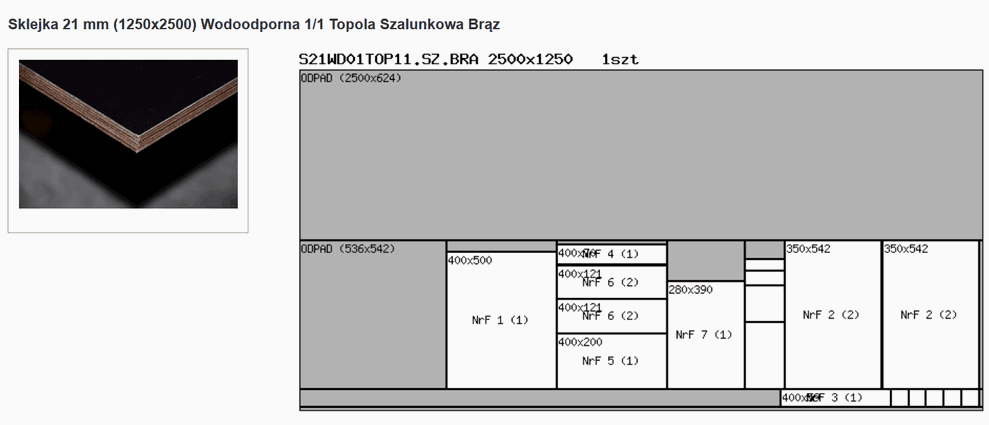
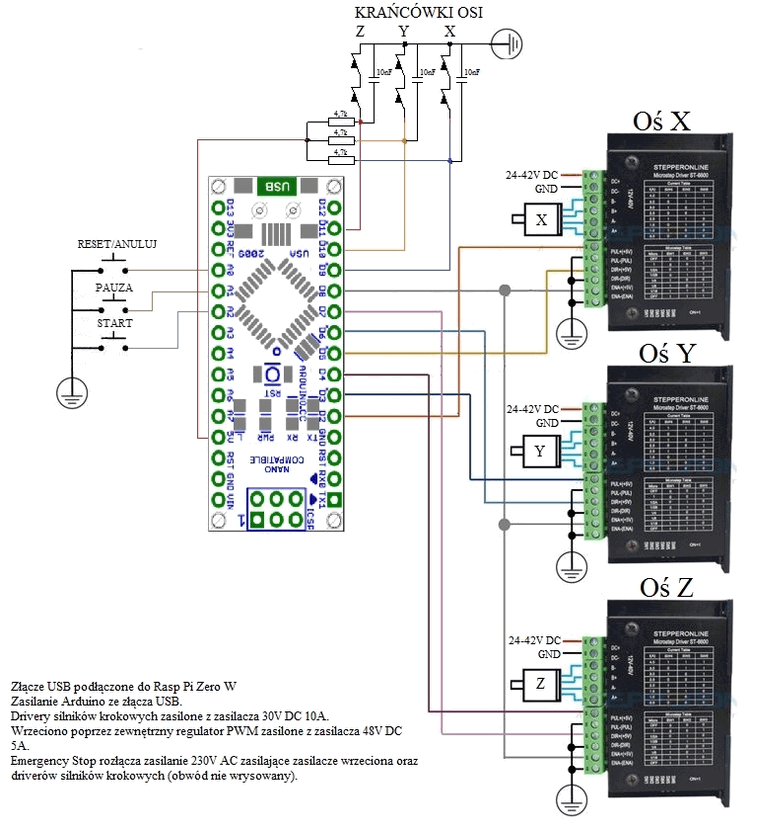
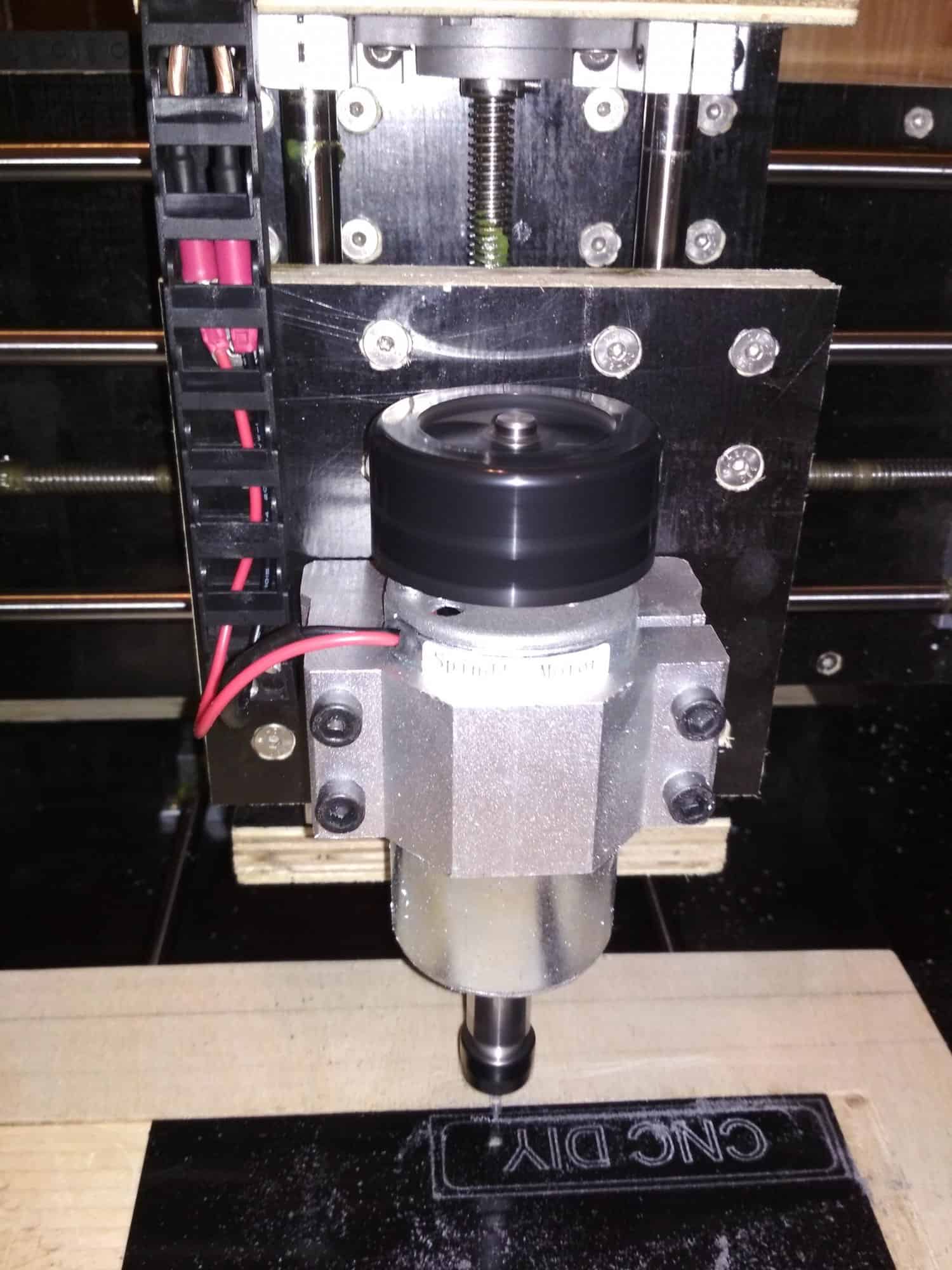
Opis konstrukcji Całość jest wynikiem obserwacji innych tego typu konstrukcji oraz własnych przemyśleń i możliwości. Konstrukcja to typowy drewniak (tania w budowie). Część elementów posiadałem z innych projektów. Całość jest sterowana z wykorzystaniem GRBL 0.9j i Arduino Nano 3.0. Dodatkowo, aby uniezależnić się od PC gcode wysyłany jest z Rasp Pi Zero W bezpośrednio do Arduino. Pole robocze frezarki to ok 240x 200mm. Wstępnie zostanie ono ograniczone limitami w oprogramowaniu GRBL. Docelowo prawdopodobnie zainstaluję krańcówki. Prześwit osi Z 64mm. Formatki ze względu na cenę całości zostały zamówione ze sklejki szalunkowej co było błędem. Różnice w grubości poszczególnych arkuszy dochodziły do 2mm (z tego powodu dostałem zwrot 50% opłaconych za sklejkę środków). Wykaz głównych elementów konstrukcji: 1. Łożyska liniowe SC12UU -12 sztuk 2. Łożyska liniowe SC12VUU -2 sztuki 3. Śruba trapezowa Tr10x2 - 540mm, 440mm, 220mm 4. Sprzęgła elastyczne 6,35x10 -4 sztuki 5. Uchwyty prowadnic liniowych 12mm - 4 sztuki 6. Sklejka szalunkowa 21mm (ok. 1,5m kwadratowego) 7. Arduino Nano 3.0 8. Rasp Pi Zero W - 1szt 9. Zasilacz 12VDC, 24VDC, 48VDC - po kilka sztuk 10. Silnik krokowy NEMA23 - 4sztuki 11. Prowadnica liniowa 12mm - 3x400mm, 2x500mm, 2x200mm 12. Nakrętka śruby Tr10x2 - 3 sztuki 13. Uchwyty śruby - łożyskowane - 6 sztuk 14. Uchwyty prowadnic liniowych 12mm - 10szt 15. Wrzeciono 300W - 1 sztuka 16. Uchwyt wrzeciona 52mm - 1 sztuka 17. Sklejka szalunkowa 21mm z cięciem (formatki wg projektu) 18. Śruby wg potrzeb 19. Sterownik silnika krokowego - klon TB6600 3 sztuki Wykaz formatek ze sklejki: 500x400 1x - podstawa 542x350 2x - boki 400x59 1x - przód (pod montaż uchwytu śruby poruszającej stolik oś Y) 400x70 1x - tył (pod montaż uchwytu śruby poruszającej stolik oraz silnika krokowego oś Y) 400x200 1x - podstawa osi X 400x121 2x - tylne półki tworzące wnękę na elektronikę 390x280 1x - stolik 142x242 1x - podstawa osi Z 142x38 1x - dół podstawy osi Z (montaż łożyska śruby osi Z) 142x50 1x - góra podstawy osi Z (montaż łożyska śruby osi Z oraz silnika krokowego) 142x130 1x - oś Z (pod montaż wrzeciona) Soft - kontroler GRBL W moim przypadku, posiadam klon arduino nano z układem CH341 instaluję driver Arduino driver ch341ser tworzący wirtualny port COM do komunikacji z mikroprocesorem. Następnie oprogramowaniem Xloader wgrywamy soft na Arduino i gotowe. Soft - wysyłanie g-code do kontrolera GRBL Teraz potrzebny nam soft na PC do wysyłania komend dla naszego kontrolera GRBL. Soft jest zarówno pod windows jak i pod linuxa. Ja w tym celu wykorzystuję minikomputer Rasp Pi Zero W (zamiast stacjonarnego PC). Wykorzystanie Rasp Pi Zero W jako PC do wysyłania G-code niesie ze soba pewne następstwa. Zasięg Wi-fi okazał się mały ze względu na słabą antenkę w malinie. Dodatkowo wydajność 1 rdzeniowego PC z 512MB RAM jest mizerna. Z tego powodu testowałem wiele rozwiązań by wybrać najbardziej dla mnie optymalną wersję. Skończyło się na instalacji Raspbian Lite, doinstalowaniu lekkiego środowiska graficznego oraz serwera VNC (by w łatwy sposób przegrywać nowe g-code do wykonania). Testowałem 2 programy do obsługi frezarki z systemu linux maliny: 1. bCNC. 2. Universal Gcode Sender - ten program pozostawiłem. Po wgraniu oprogramowania na malinkę wystarczy podpiąć do malinki po USB Arduino z wgranym Grbl, wybrać port COM i połączy się z oprogramowaniem. Zobaczymy wtedy ustawienia konfiguracyjne naszego softu. Ich opis jest zależny od wersji. W moim wypadku Konfiguracja GRBL 0.9 Schemat elektryczny Poza schematem jest chińskie wrzeciono 300W, które załączam ręcznie. Prędkość jest sterowana z wykorzystaniem regulatora PWM 60VDC, 20A i zasilana napięciem 48VDC. Działanie Po wstępnej konfiguracji możemy przystąpić do testów naszego CNC. 1. Frezowanie napisów w płytkach plastikowych 2. Wyfrezowane płytki pod ESP8266 A oto filmiki z działania urządzenia: Podsumowanie Na pewno konstrukcja nie jest najlepsza, 3 prowadnice na jednej osi (wykorzystałem posiadane prowadnice i łożyska).Dość cienkie prowadnice, dodatkowo swobodnie wiszące. Przy pierwszych testach wyszło, iż śruba trapezowa na osi X jest do wymiany (na odcinku 100mm ma luz ponad 0,3mm). Pozostało zrobić osłony śrub trapezowych i prowadnic osi Y, w planach osłona z pleksy aby wióry nie rozsypywały się przy frezowaniu poza urządzenie. Być może później jakiś odciąg. Oczywiście pojawi się wyłącznik awaryjny oraz krańcówki. W sumie jestem zadowolony. Podstawowy cel - grawerowanie PCB wraz z wierceniem, wycinanie formatek ze sklejki i pleksy bezproblemowe. W razie dodatkowych pytań postaram się w miarę możliwości udzielić odpowiedzi. Jeśli ktoś chciałby dokładniejsze informacje na temat wykonania całości po polecam pobranie i przejrzenie pliku Frezarka CNC.zip (33 strony powinny zaspokoić ciekawość). Frezarka CNC.zip