Przeszukaj forum
Pokazywanie wyników dla tagów 'grbl'.
Znaleziono 4 wyniki
-

Ploter XY (90x60 cm) do rysowania szablonów elementów samolotów RC
aimeiz opublikował temat w Projekty - DIY
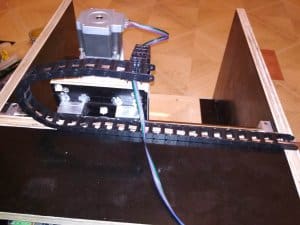
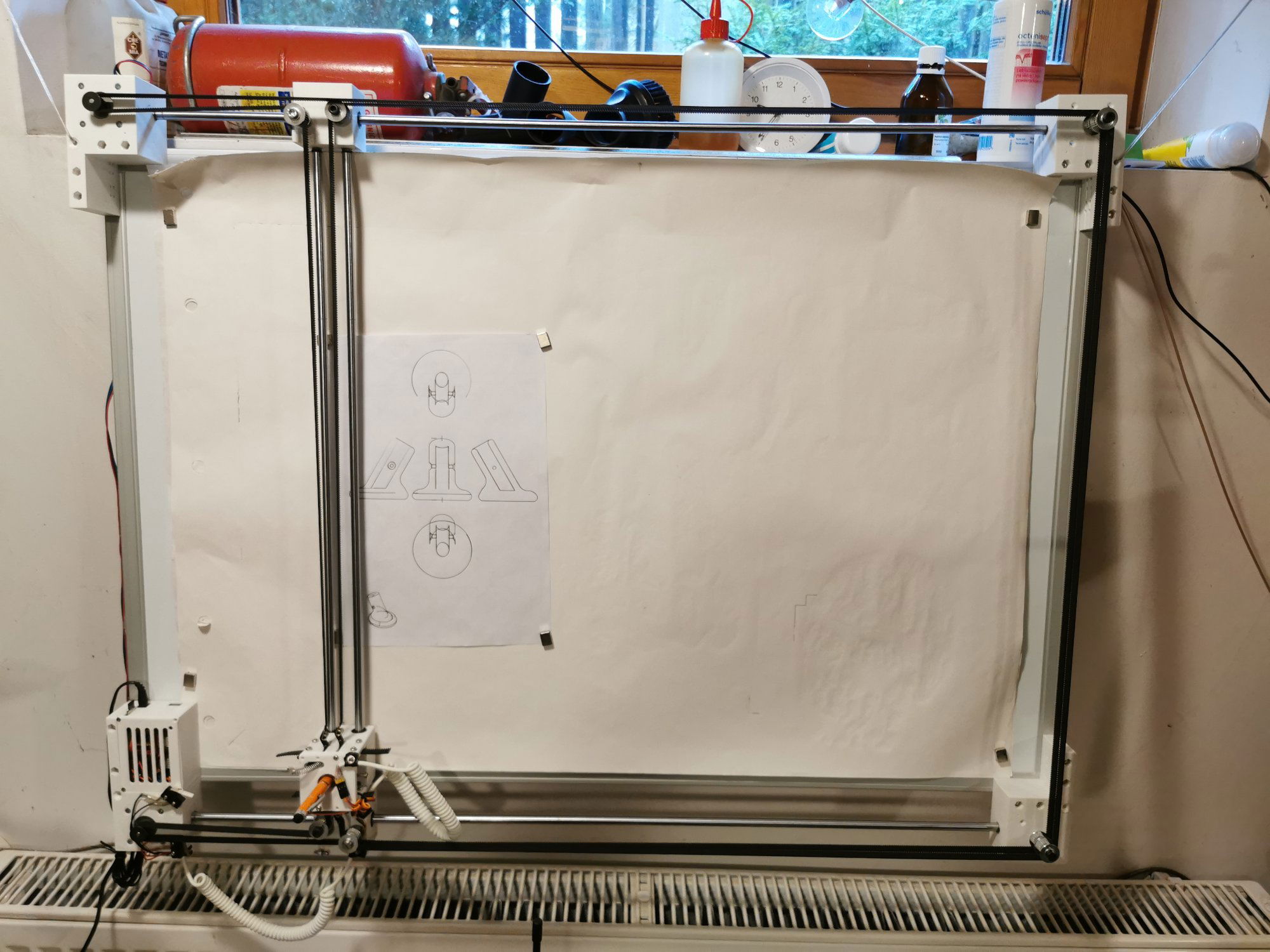
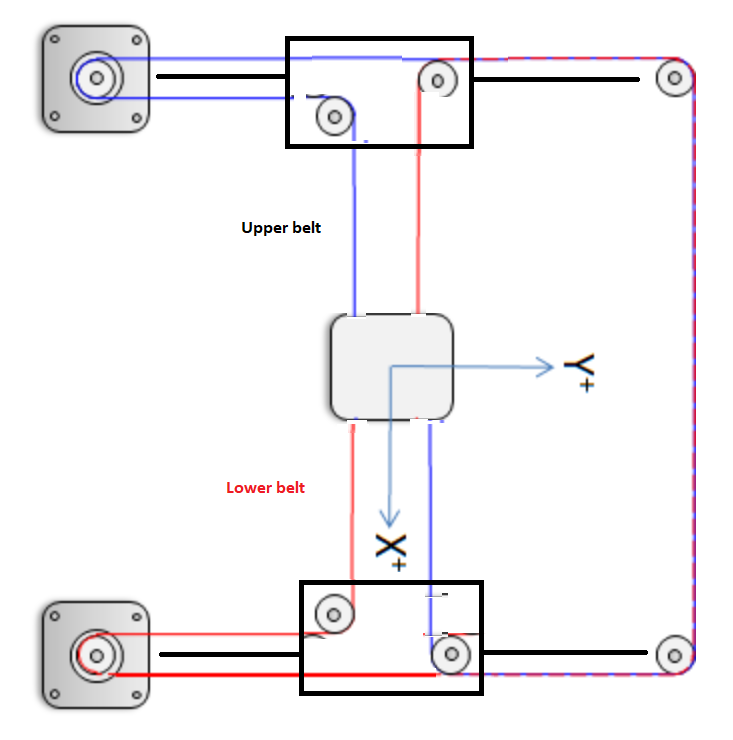
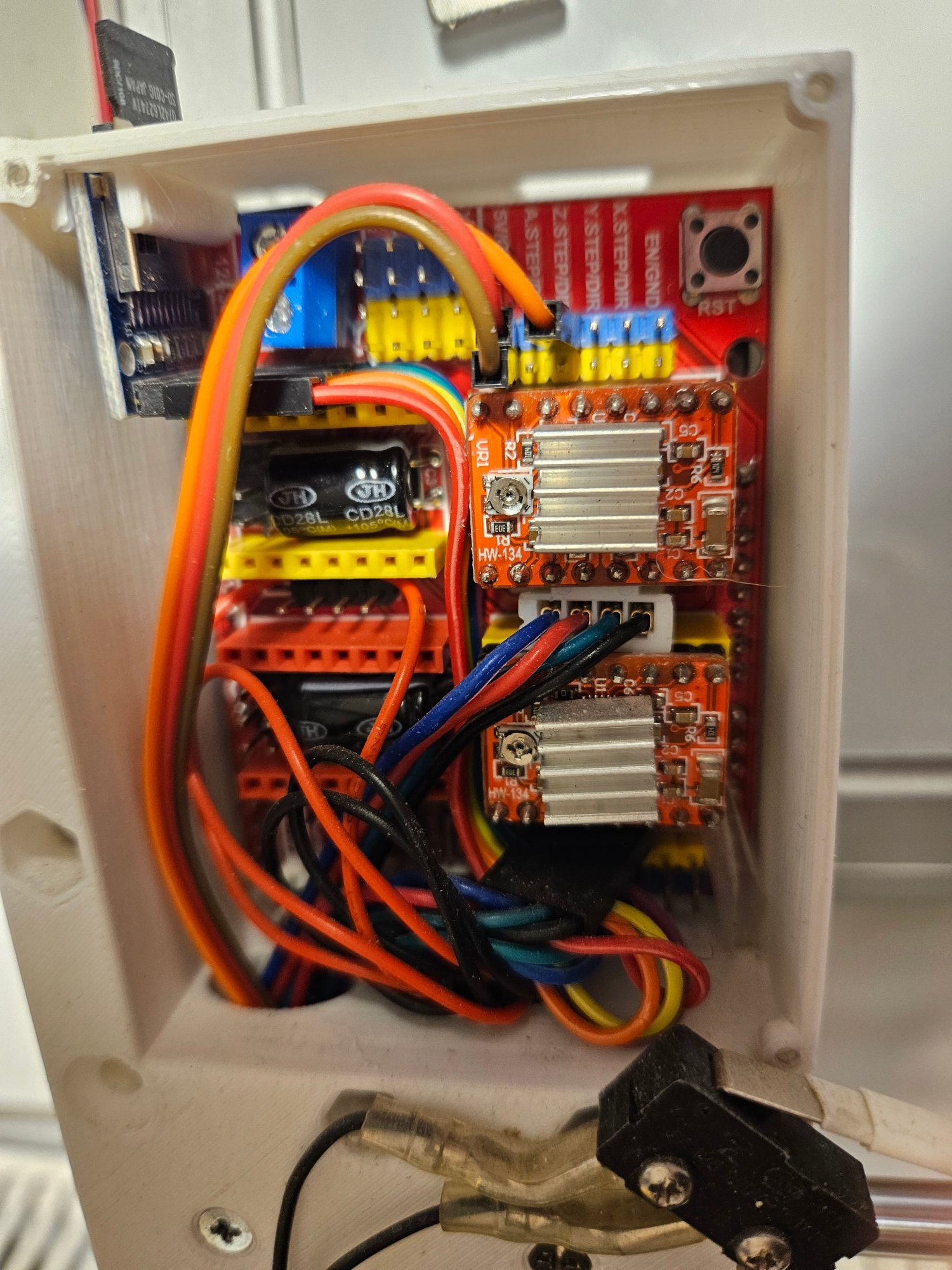
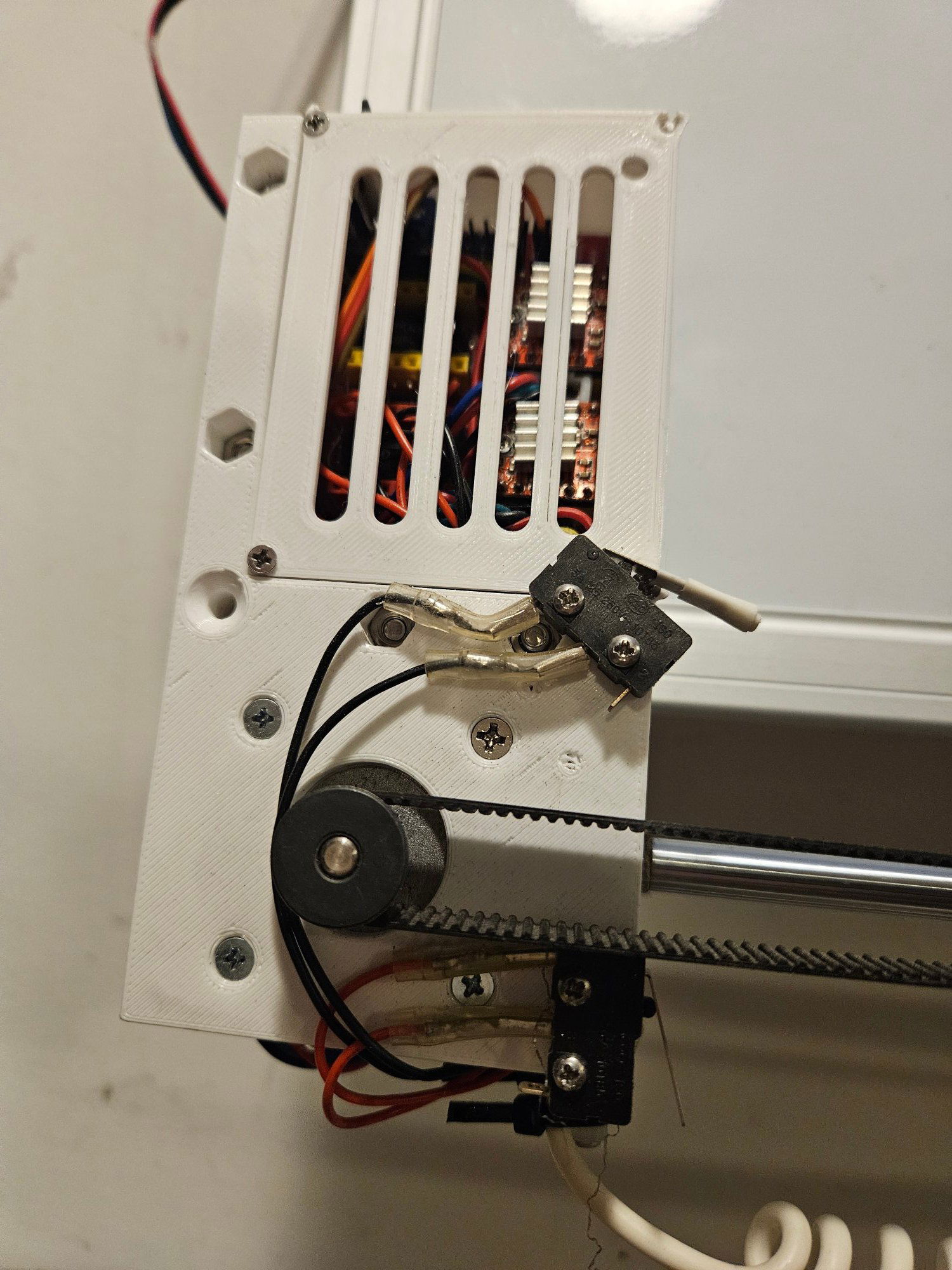
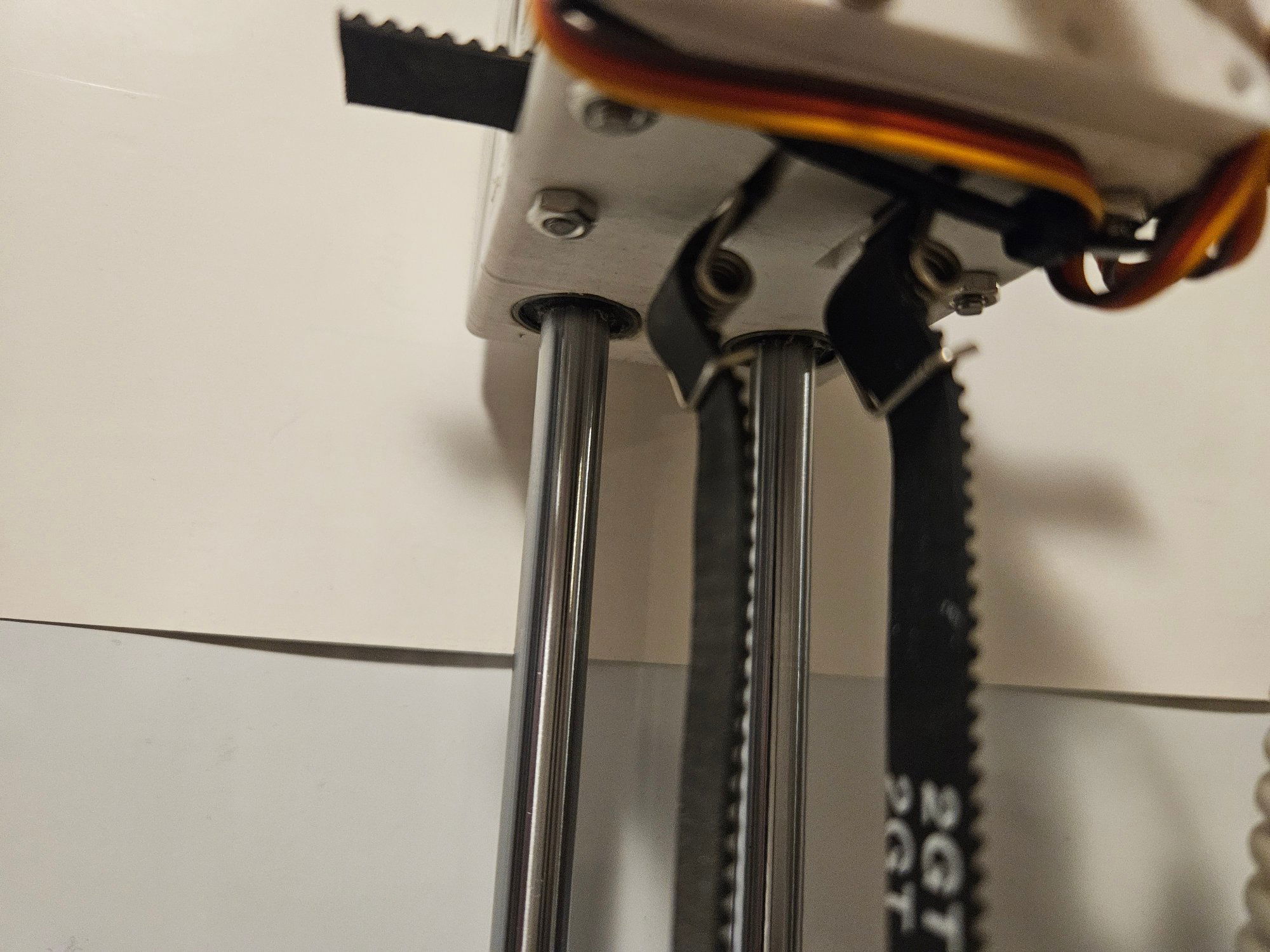
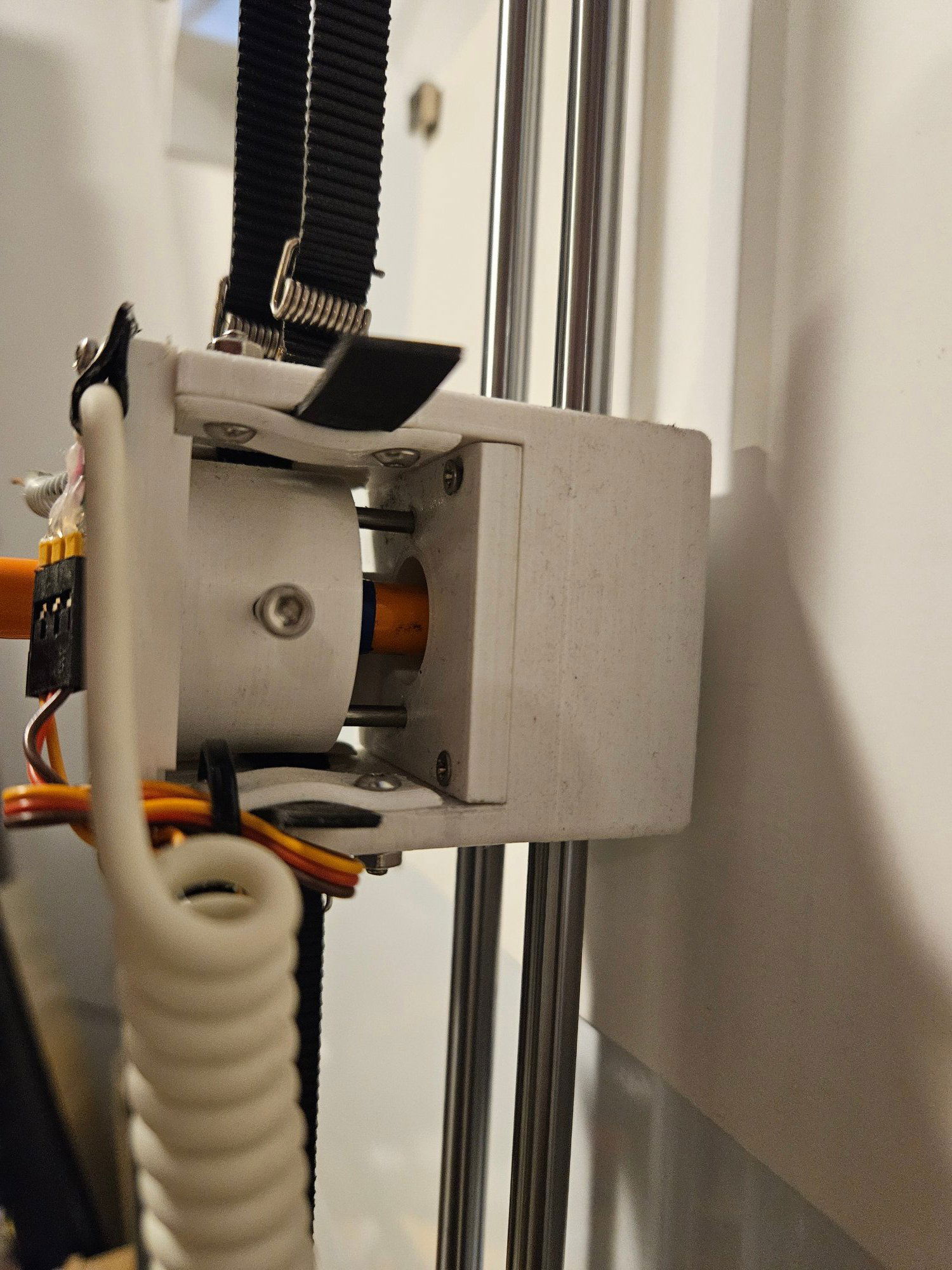
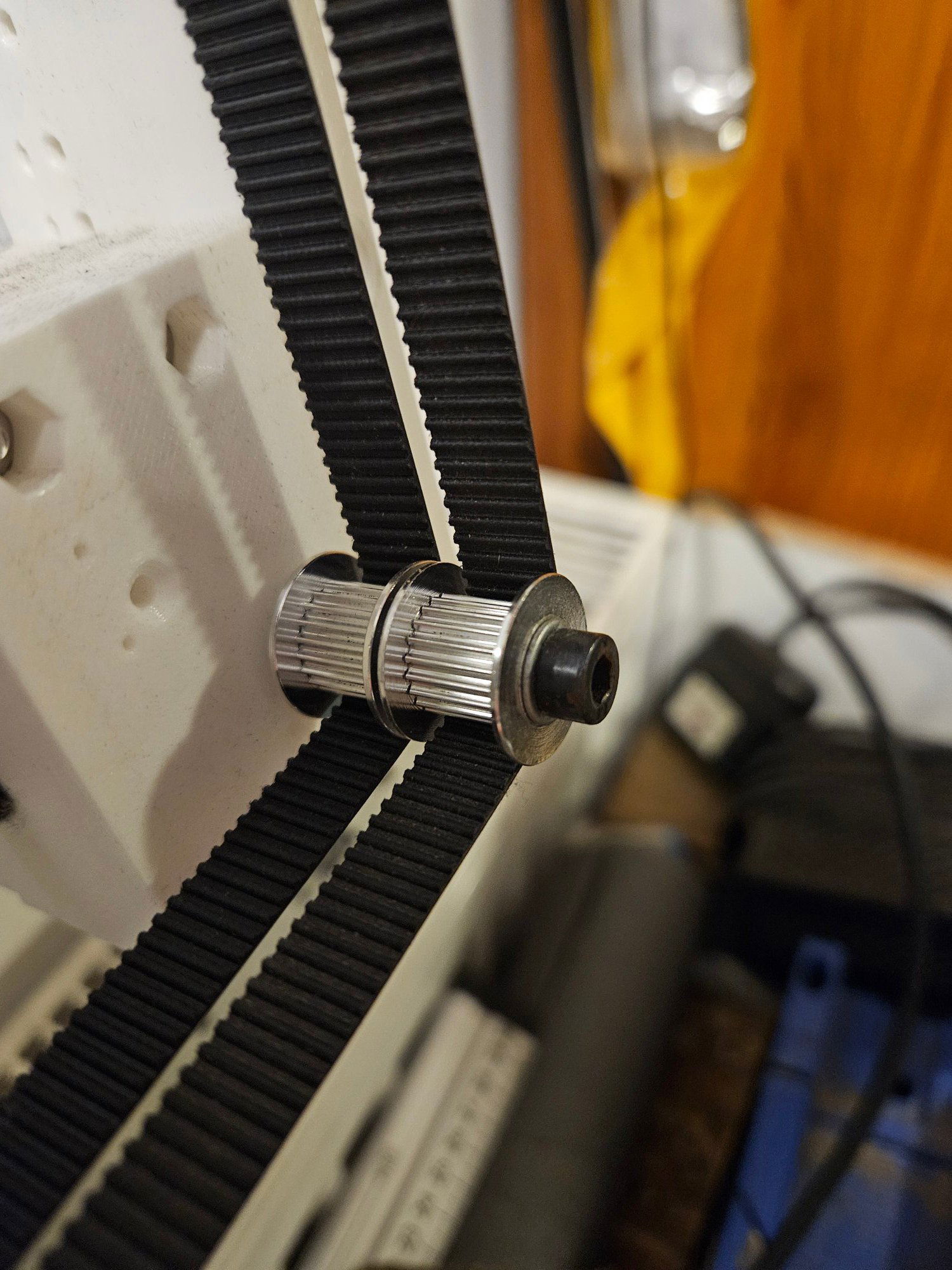
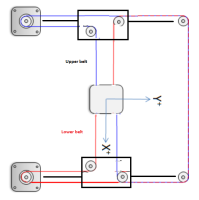
Do moich konstrukcji modelarskich potrzebowałem plotter do wyrysowania szablonów sporych elementów do samolotów RC. Drukowanie na drukarce i sklejanie z arkuszy A4 jest niewygodne i prowadzi do błędów, więc postanowiłem wykonać plotter o sporym formacie. W Internecie znalazłem niedrogie tablice ścienne z ramą aluminiową i magnetycznym pokryciem i uznałem, że będzie to dobra podstawa do mojego plotera. Największe dostępne są 120x90cm, ale wybrałem mniejszą 90x60cm. Urządzenie takiej wielkości zajmuje dużo miejsca, więc wykonałem je w formie do zawieszenia na ścianie. Bazą doświadczeń do wykonania projektu był przeznaczony do wykonanie przez młodzież z klubu radiowego mini ploterek "złomek" wykonany z elementów uzyskanych z uszkodzonych nagrywarek DVD, uzyskiwanych bezpłatnie w serwisach komputerów i z kontrolerem na Arduino UNO lub mini i shieldu CNC. Jako oprogramowanie - firmware użyłem tam dostępny na GitHub firmware grbl i początkowo duży ploter też działał na takim sterowniku. W międzyczasie znalazłem projekt grbl_Esp32, umożliwiający bezprzewodową łączność z urządzeniem, poprzez stronę www, telnet, BT i też tradycyjnie po kablu USB. Dzięki zastosowaniu procesore ESP32, urządzenie może łączyć się z lokalną siecią, lub działać przez bezpośrednie połączenie w trybie AP. Webowe GUI można zmodyfikować do własnych potrzeb. Napisane jest z użyciem popularnego frameworku bootstrap. Podobno istnieje lepsza wersja, która pokazuje na bieżąco postęp wydruku i położenie karetki. Też zauważyłem że jest napisany od nowa grbl-Esp, ale nie testowałem. Najpopularniejsze podobne konstrukcje bazują na tradycyjnym rozwiązaniu XYZ, gdzie silnik osi Y jeździ wraz z karetką. To rozwiązanie nie podobało mi się, gdyż czyni ruchomą część ciężką i wymaga dodatkowych 4 przewodów do silnika krokowego. Spodobało mi się rozwiązanie tzw.. CoreXY, gdzie silniki obydwu osi są nieruchome a karetka zawiera jedynie serwomechanizm osi Z. To bardzo ciekawe rozwiązanie. Gdy obydwa zębate paski poruszają się w tym samym kierunku, karetka porusza się po osi X, a jak w przeciwnych - po osi Y, tak że potrzebny jest jedynie 3 żyłowy kabelek do serwomechanizmu. Wykonanie plotera. Po zaopatrzeniu się w podzespoły należy zacząć od wydrukowania plastikowych elementów. Następnie należy wywiercić otwory na śrub mocujące uchwyty silników i rolek w aluminiowej ramie tablicy. Elementy ustawia się według zewnętrznych krawędzi tablicy. Początkowo nie stosowałem dodatkowego usztywnienia tablicy, co sprawdzało się przez kilka lat, ale plotter wisi na ścianie nad kaloryferem i pod okienkiem piwnicznym, które w lecie jest otwierane i niestety pilśniowa płyta nieco się spaczyła, więc zamówiłem aluminiowe ceowniki, które przykręcę od spodu tablicy - 3 sztuki wzdłuż osi Y, aby zapobiec wypaczaniu. Zastanawiam się jak umocować do nich blat tablicy najlepiej bez przewiercania, aby powierzchnia robocza nadal pozostała idealnie gładka. Najlepiej usztywnić tablicę od razu podczas budowy. Ważną rzeczą jest zapewnienie właściwego zasilania serwomechanizmu. Dostępne kable spiralne niestety mają niepomijalną oporność i przy gwałtownych ruchach serwomechanizmu spada napięcia. Dlatego zastosowałem regulowalny moduł step-down z ustawionym napięciem 6V akceptowanym przez serwomechanizm, aby na końcu dostawał co najmniej pełne 5V. W przyszłości zamierzam umieścić ten moduł w karetce, co zapewni dobre zasilanie serwomechanizmu. Leży u mnie w szpargałach laserowy moduł do cięcia i być może ten element użyty będzie zarówno do rysowania, jak i cięcia, a posiadanie wycinarki laserowej o takim formacie to super sprawa. Szczegóły widoczne na zdjęciach: Oprogramowanie firmware należy ściągnąć ze strony projektu projekt GRB:_Esp32 na Github. Należy zmodyfikować pliki konfiguracyjne: config.h - tu można wpisać SSID i hasło punktu dostępowego naszej sieci, ale nie jest to niezbędne. Machine.h - tu wpisujemy jedną linię, aby kompilator użył pliku odpowiedniego dla naszej maszyny. #include "Machines/corexy_servo_Z_R32_UNO_CNC.h" //This is for Core XY Plotter with servo. stworzyć na bazie pliku corexy_pen_laser.h, plik dla własnej maszyny. Sa tam zdefiniowane porty dla silników, serwomechanizmu, krańcówek i parametry czasowe, które nie zostały zmieniane. W moim przypadku stworzyłem plik corexy_servo_Z_R32_UNO_CNC.h, poniżej najistotniejsze modyfikacje. #define X_STEP_PIN GPIO_NUM_26 //GPIO_NUM_12 #define X_DIRECTION_PIN GPIO_NUM_16 //GPIO_NUM_26 #define Y_STEP_PIN GPIO_NUM_25 //GPIO_NUM_14 #define Y_DIRECTION_PIN GPIO_NUM_27 //GPIO_NUM_25 #define STEPPERS_DISABLE_PIN GPIO_NUM_12 //GPIO_NUM_13 #ifdef PEN_LASER_V1 #define X_LIMIT_PIN GPIO_NUM_2 #endif #ifdef PEN_LASER_V2 #define X_LIMIT_PIN GPIO_NUM_13 //GPIO_NUM_15 #endif #define Y_LIMIT_PIN GPIO_NUM_5 //GPIO_NUM_4 #define USING_SERVO // uncomment to use this feature #ifdef USING_SERVO #define Z_SERVO_PIN GPIO_NUM_17 //GPIO_NUM_23 //GPIO_NUM_27 #define DEFAULT_Z_MAX_TRAVEL 5.0 // or change it live with $Z/MaxTravel=5.0 #define DEFAULT_Z_HOMING_MPOS 0.0 // $Z/Homing/MPos=5.0 #endif Widać które porty procesora sterują silnikami, serwem i które użyte są do krańcówek, zresztą początkowo ploter nie posiadał krańcówek. Nie są one niezbędne, choć wygodne, bo w powtarzalny sposób sprowadzamy karetkę do położenia x0, Y0.Było trochę eksperymentowania i poprzednie wartości zostawiłem w formie zakomentowanej. Po skompilowaniu i załadowaniu firmware, można do tego celu użyć Arduino IDE lub VScode / PlatformIO, najwygodniej połączyć się po kablu USB za pomocą dowolnego programu do obsługi urządzeń grbl, może być bezpłatny laserGrbl do ściągnięcia z sieci. To właściwie jest podstawowy program do obsługi urządzenie i przygotowywania projektów, ale są też inne. Trzeba w konfiguracji plotera wpisać ssid i hasło do sieci lokalnej, choć można to wstępnie wpisać w pliku config.h, wtedy ploter odrazu połaczy się z siecią i można się komunikować przez przeglądarkę. Początkowo interfejs webowy jest mizerny i pozwala tylko na wgranie właściwej strony www index.html.gz z katalogu data. Interfejs GUI www umożliwia ręczne sterowanie ploterem, też wgrywanie projektów na kartę SD i modyfikacje ustawień grbl. W konfiguracji grbl należy dobrać ustawienia, tak, aby karetka poruszała się we właściwych kierunkach i o właściwe przesunięcia w mm. są tam też maksymalne prędkości, przyspieszenia, należy to dobrać do wykonanej konstrukcji. Trzeba też wyregulować natężenie prądu silników w stepstikach, tak aby radiatorki za bardzo nie parzyły i silniki nie grzały się zbyt mocno, a jednocześnie zapewniały szybkości i przyspieszenia. Co do konstrukcji mechanicznej, są dwa istotne aspekty: Prowadnice liniowe trzeba przyciąć do takiej długości, aby opierały się o silniki i mocowania rolek. Mimo że elementy plastikowe zaprojektowane są tak, aby wchodziły "na wcisk", jednak warto zabezpieczyć się wszelkimi dostępnymi sposobami, aby prowadnice nie miały możliwości też wzdłużnego przemieszczania się. Są dodatkowym, a właściwie głównym elementem zapewniającym sztywność konstrukcji, mimo że aluminiowa rama tablicy jest dość solidna. Element mocowania pióra przesuwany jest po metalowych prowadnicach. Prowadnice początkowo wchodzą dość ciasno i trzeba mechanizm dotrzeć a potem nasmarować smarem do drukarek 3D, aby poruszał się lekko, ale bez luzów. Pierwotna wersja zawierała łożyska liniowe, ale niestety te małe łożyska są źle wykonane i mają duże luzy, a nie chciałem stosować łożysk 8mm, więc zrezygnowałem z łożysk i karetka sama jest łożyskiem. Generalnie sprawdza się, choć przyznam że karetka i mechanizm osi Z to element, który warto by przebudować i ulepszyć. Tak samo pióro kulkowe z jednej strony odporne jest na zbyt duży docisk, ale wymaga rozpisania przed wydrukiem, Piórka typu flamaster z twardym końcem drą papier, a te miękkie rozpłaszczają się. To wychodzi po miesiącach / latach, kiedy płyta paczy się i traci swą równość, dlatego warto zastosować dodatkowe usztywnienia. Wszelkie długopisy, mazaki, zwłaszcza kulkowe, ze względu na grawitacyjny spływ barwnika, nie piszą "pod górę" i źle piszą w poziomie. Dlatego dolne nóżki plotera są długie, a górne krótsze, dzięki czemu pióro skierowane jest nieco do dołu, co zapewnia ciągłość pisania. Jeśli kreślimy na cienkim papierze, to warto podłożyć kilka kartek, aby zapewnić pewną miękkość i zabezpieczyć się przed pisaniem bezpośredni na tablicy, w przypadku przecięcia papieru przez pióro. Ja mam założonych kilka kartek pełnego formatu tak na stałe zamocowanych magnesami neodymowymi i dopiero na tym podkładzie jest mocowane właściwe medium. To co mogę powiedzieć po kilku latach użytkowania. Urządzenie działa, jest wygodne i przydatne. Wisi na ścianie i nie zajmuje miejsca. To co bym ulepszył, to usztywnienie tablicy i ulepszenie mechanizmu osi Z, przy zachowaniu niewielkich rozmiarów i elastyczności w stosowanych pisakach. Są takie wielokolorowe długopisy. Taki pisak pozwalałby na ręczną zmianę koloru bez wyjmowania pióra, ale są zbyt grube na tę wersję karetki. Być może przebuduję karetką, aby można było mocować moduł lasera. Umożliwiało by to zarówno rysowanie jak i cięcie przy dobraniu odpowiednich parametrów szybkości i mocy lasera. Niestety nie mogę nigdzie znaleźć filmów z pracy plotera, choć na pewno gdzieś je mam. Jak tylko wykonam usztywnienia tablicy, to sfilmuję pracę urządzenia i dodam link do filmu. Spis elementów. Elementy dostępne w Botland mają linki do sklepu. Niestety głównych elementów nie znalazłem w Botland, więc trzeba ich szukać gdzie indziej. Łożyska liniowe LM8UU x8 Karta microSD >=8GB np. moduł czytnik kart MicroSD Zasilacz 12V/3A Moduł step down 12 - 6V >= 2A do zasilania serwomechanizmu. Wałek liniowy 8mm 80cm x2, 64cmx2 wałki liniowe 4mm do karetki. Płytka ESP32 Wemos D1 UNO R32 na ESP32 ewentualnie ardi32 - trzeba by dostosować obudowę i konfigurację oprogramowania do tej płytki. CNC Shield V3 do Arduino UNO Moduł sterownika 4 silników krokowych Sterownik silnika krokowego A4988 RepRap lub lepszy x2 Serwomechanizm MG90 1x Miękka i długa ściskana sprężynka 5x50mm i stalowy drucik 1mm do mechanizmu podnoszenia i opuszczania pióra (oś Z), zapewniającego miękki docisk pióra do papieru. silnik krokowy MEMA17 np. 12V/0.4A, Ja użyłem demobilowych z Allegro z zębatkami do pasków. x2 Kabelki płytka - silnik 70cm x1. 20cm x1 Rolki do pasków zębatych 10mm x8 bierne, 2 szt. do silników krokowych, jeśli nie mają zintegrowanych. Śruby, nakrętki, podkładki do mocowania uchwytów i na ośki rolek. Do dobrania, Wkręty.... Kable spiralne o małej rezystancji do karetki. Tablica magnetyczna 90x60. https://allegro.pl/oferta/tablica-magnetyczna-suchoscierna-90x60cm-suchoscieralna-magnesty-markery-17140553162 Magnesy neodymowe silne np. 12x10x4mm do mocowania papieru. Ceowniki do usztywnienia tablicy 15x20mm 60cm x3 Oprogramowanie grbl_esp32: https://github.com/bdring/Grbl_Esp32 Długopis / pisak kulkowy lub inny 1x Wydrukowane 3D elementy plastikowe. Mogą być z PLA. Komplet plików stl do wydruku w załączony pliku zip. stl.zip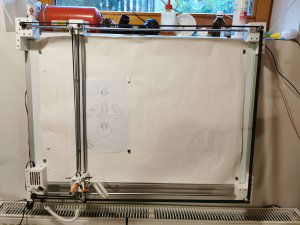








-
Mam problem z Arduino Uno podłączonym do cnc shield v3 i UGS. Gdy chcę przesunąć serwo w osi Z o 30 °, to ciągle się obraca. Jaka może być przyczyna?
-
Witam, Od niedawna jestem na forum, pisze w związku z problemem, który napotkałem przy projekcie. Projektem jest skaner szczątkowego pola magnetycznego, to znaczy chodzi o zbudowanie urządzenia które będzie poruszało się w trzech osiach X,Y,Z tak jak ploter, drukarka 3D, itd. zamiast frezu czy hotendu ma być moduł czujnika pola magnetycznego GY-271. Urządzenie ma skanować wybrany obiekt ,zapisać dane do pliku a na podstawie zapisanych danych będzie stworzony wykres 3D rozkładu szczątkowego pola magnetycznego. Problem polega na tym, że nie jestem dobry w programowaniu, potrafię sobie poradzić z odczytem danych z czujnika ale mam zbyt małą wiedzę by napisać program do obsługi trzech silników które pozwalałyby wprowadzić w ruch czujnik. Myślałem nad wykorzystaniem oprogramowania GRBL ale musiałbym użyć dwóch procesorów, jedna płytka arduino obsługiwała by czujnik a druga ploter, próbowałem połączyć dwa programy ale niestety nie udało mi się. I tu pojawia się moje pytanie do was bardziej doświadczonych użytkowników arduino, czy można było by rozwiązać ten problem w inny sposób?, czy może ktoś mógłby pomóc mi w napisaniu kodu do obsługi skanera? Za wszelką pomoc dziękuję wam z góry.
-
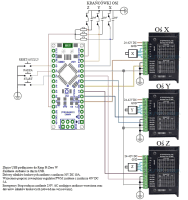
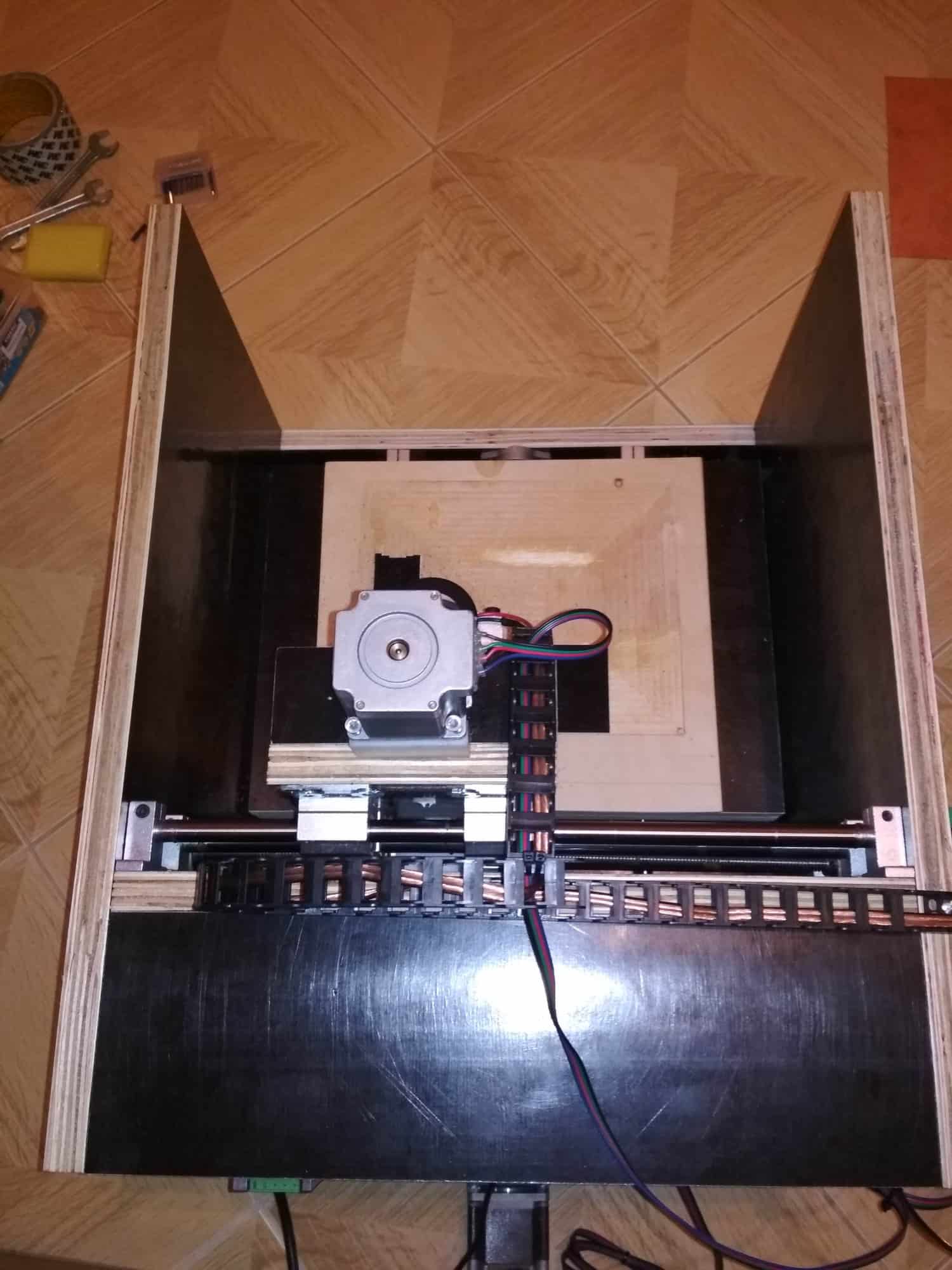
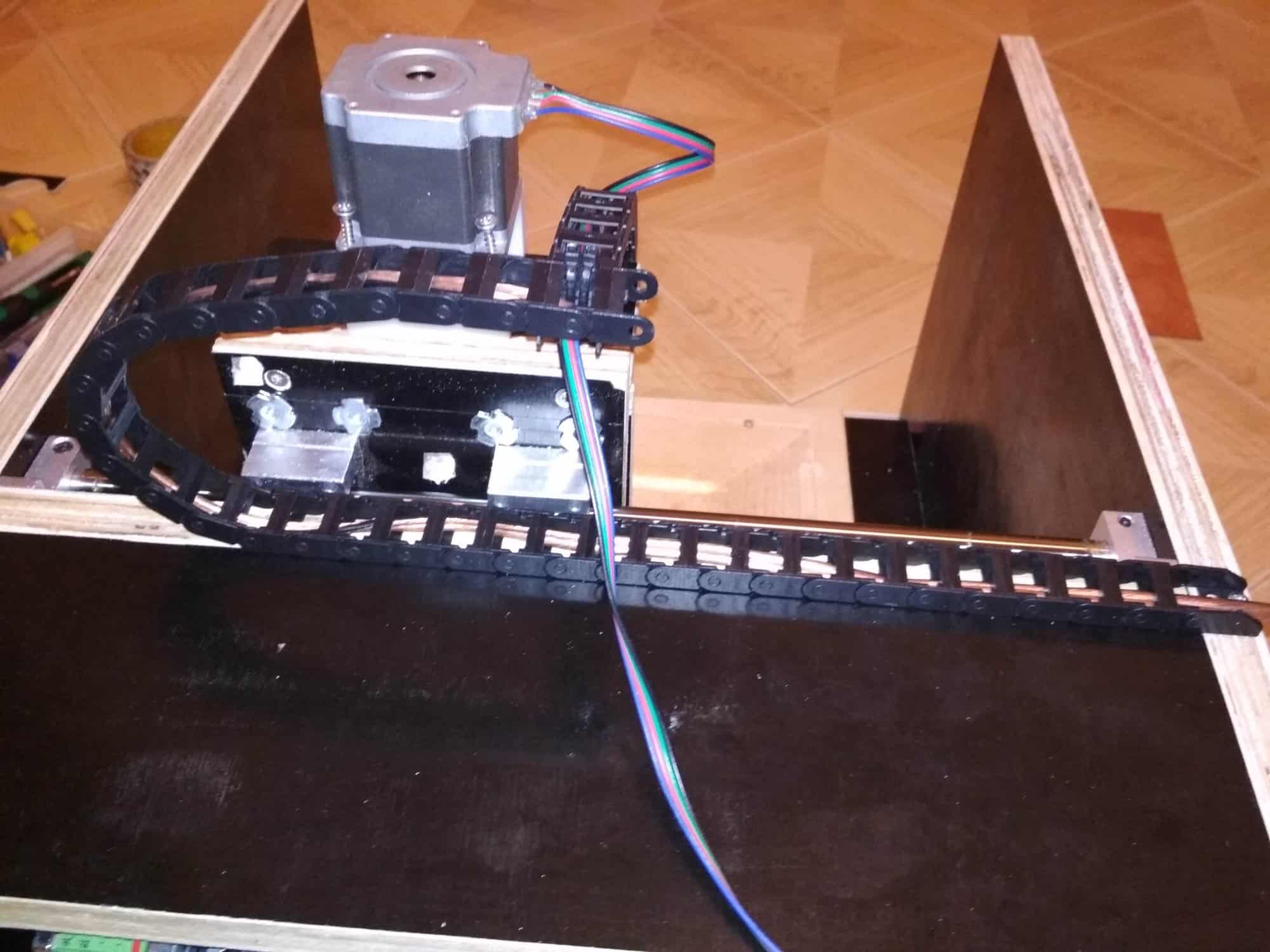
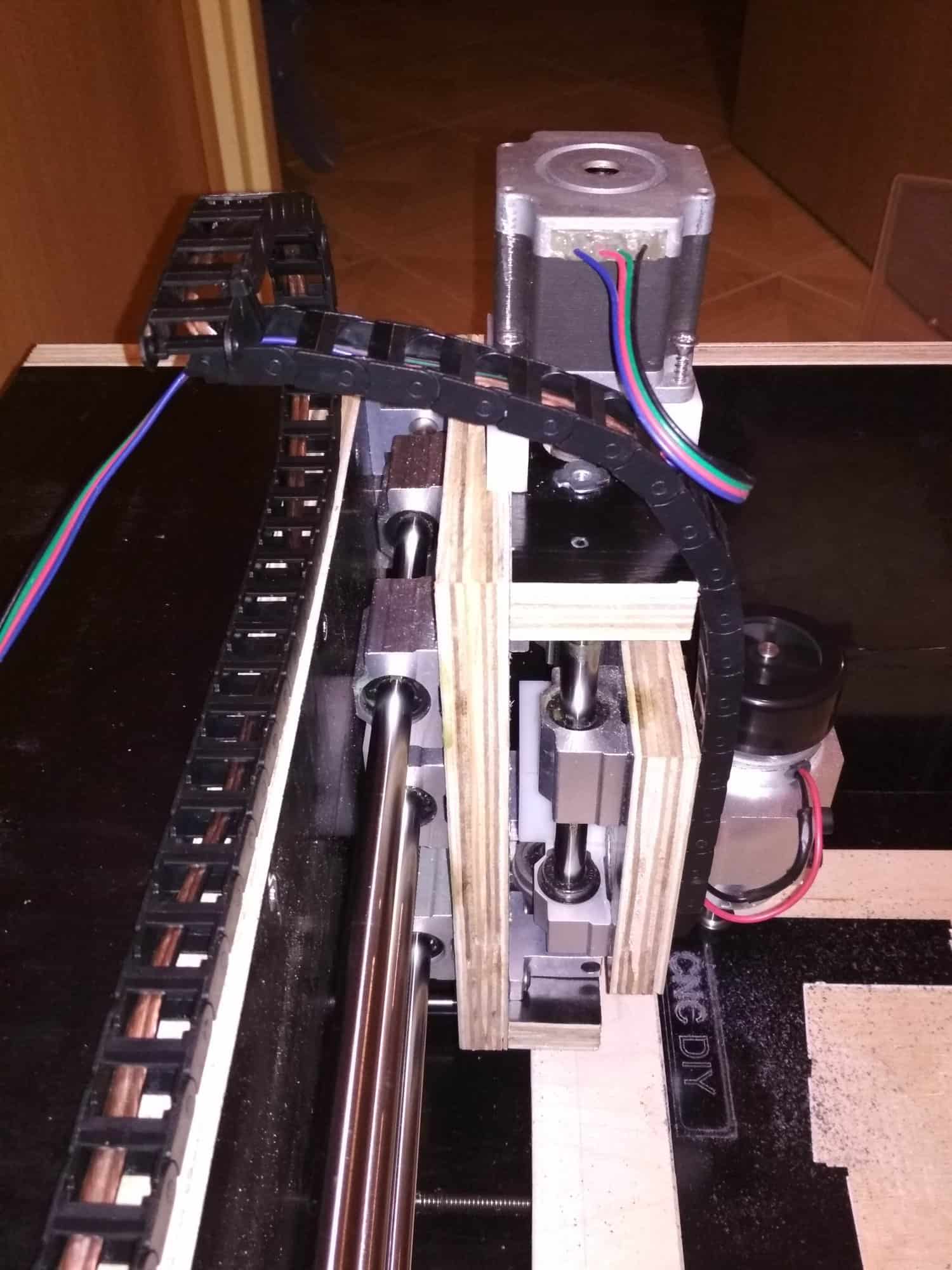
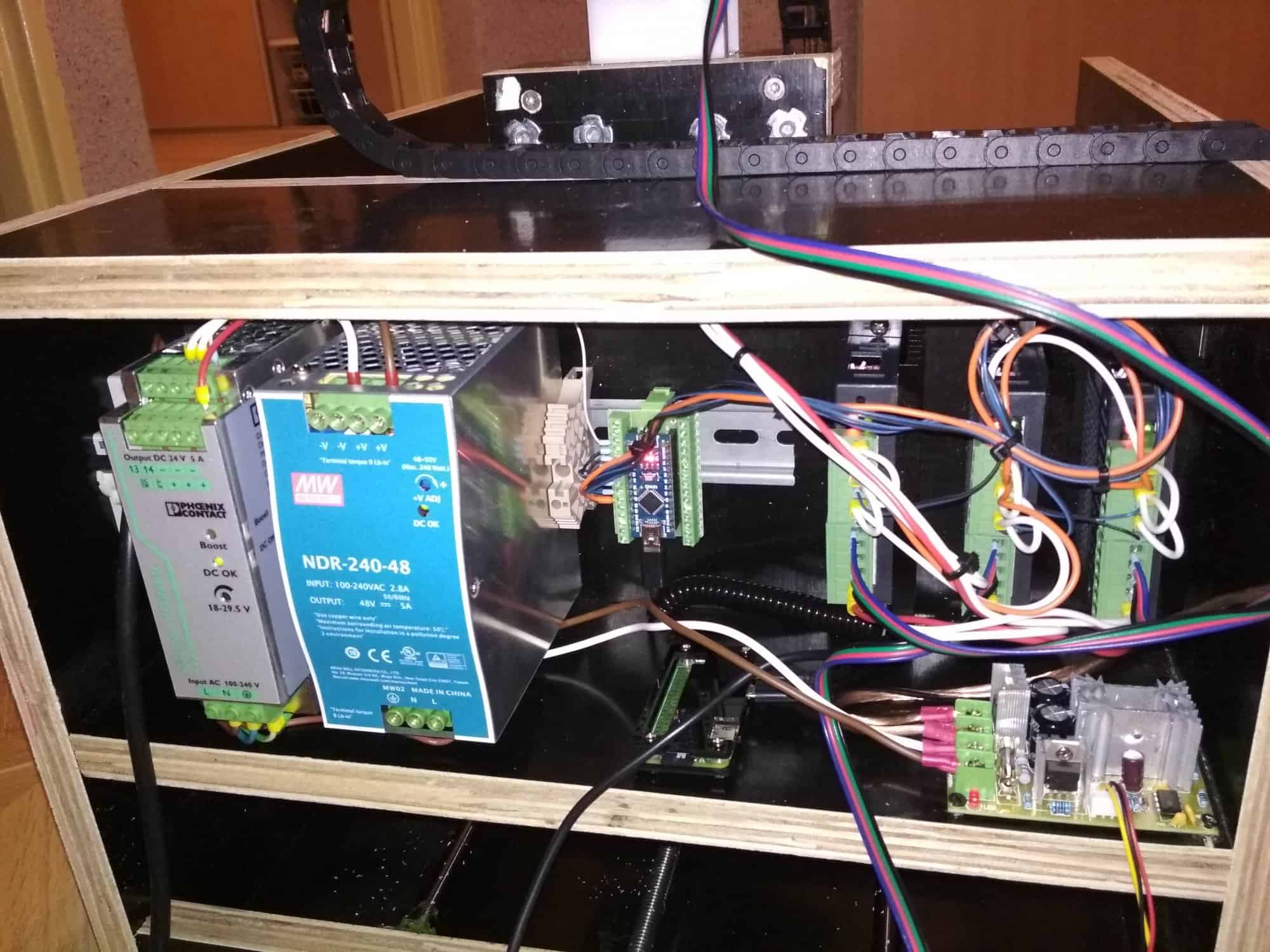
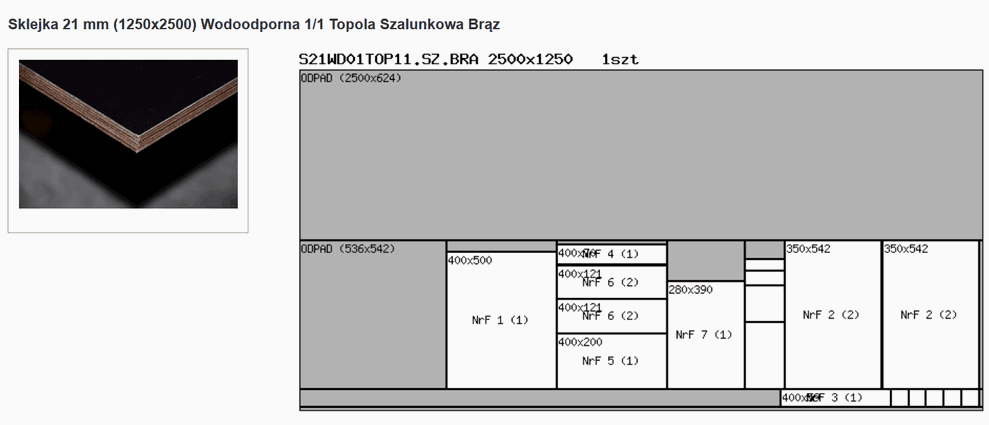
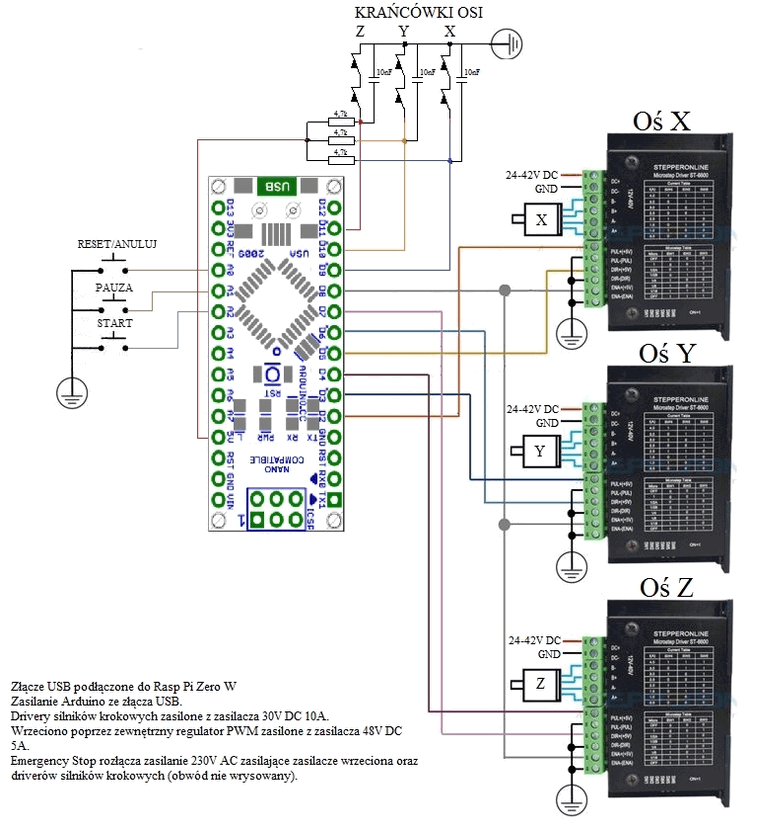
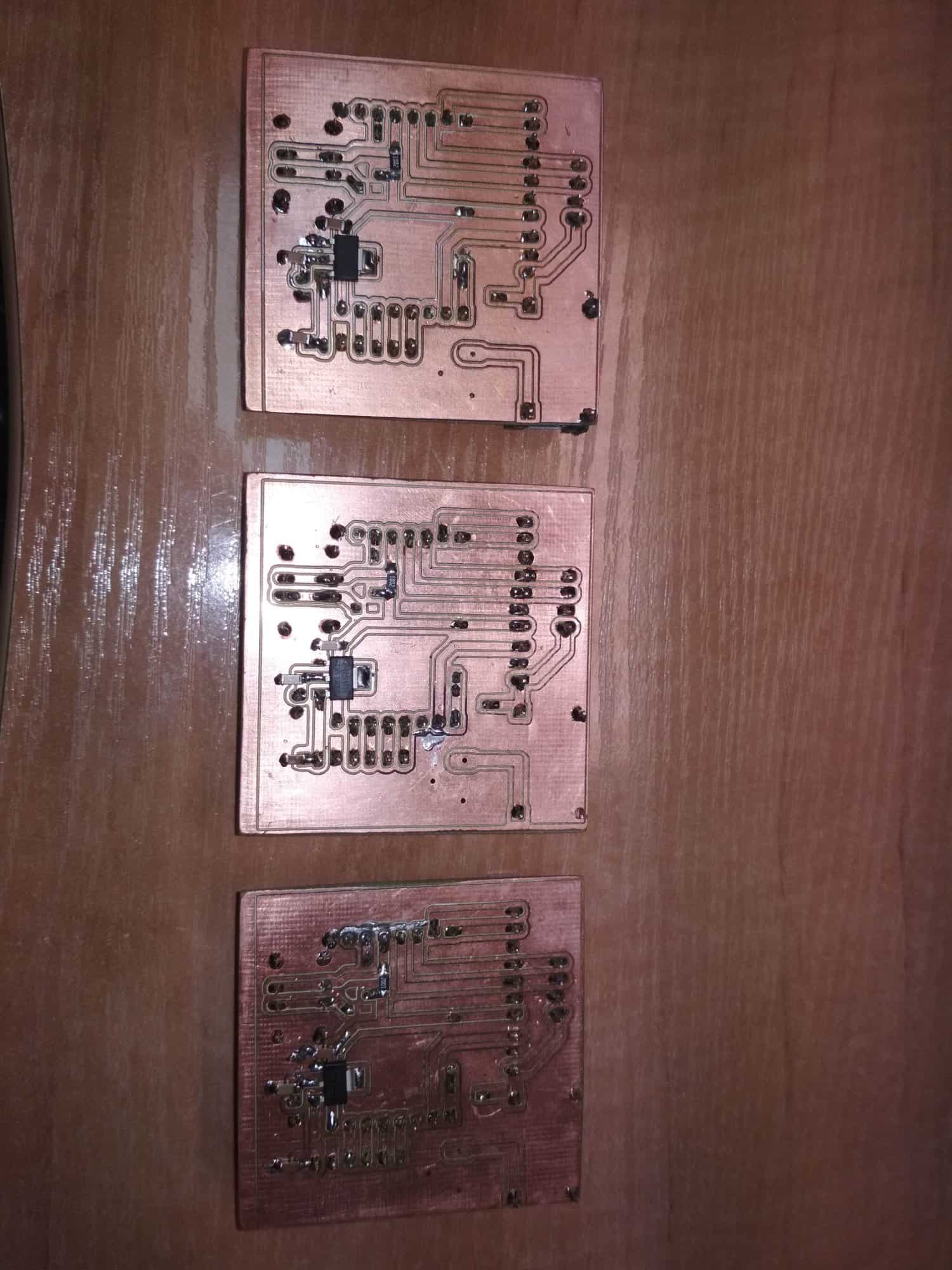
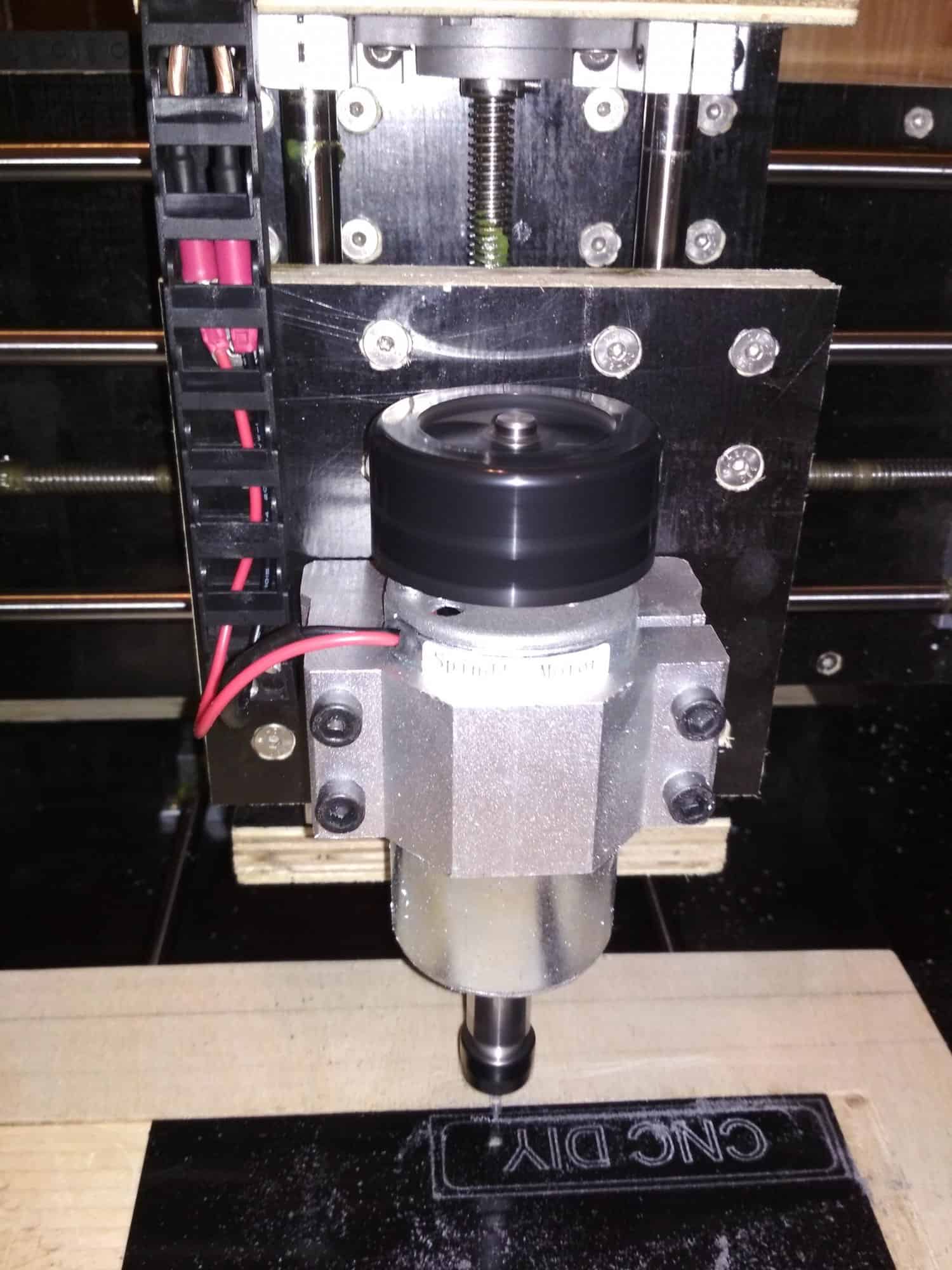
Opis konstrukcji Całość jest wynikiem obserwacji innych tego typu konstrukcji oraz własnych przemyśleń i możliwości. Konstrukcja to typowy drewniak (tania w budowie). Część elementów posiadałem z innych projektów. Całość jest sterowana z wykorzystaniem GRBL 0.9j i Arduino Nano 3.0. Dodatkowo, aby uniezależnić się od PC gcode wysyłany jest z Rasp Pi Zero W bezpośrednio do Arduino. Pole robocze frezarki to ok 240x 200mm. Wstępnie zostanie ono ograniczone limitami w oprogramowaniu GRBL. Docelowo prawdopodobnie zainstaluję krańcówki. Prześwit osi Z 64mm. Formatki ze względu na cenę całości zostały zamówione ze sklejki szalunkowej co było błędem. Różnice w grubości poszczególnych arkuszy dochodziły do 2mm (z tego powodu dostałem zwrot 50% opłaconych za sklejkę środków). Wykaz głównych elementów konstrukcji: 1. Łożyska liniowe SC12UU -12 sztuk 2. Łożyska liniowe SC12VUU -2 sztuki 3. Śruba trapezowa Tr10x2 - 540mm, 440mm, 220mm 4. Sprzęgła elastyczne 6,35x10 -4 sztuki 5. Uchwyty prowadnic liniowych 12mm - 4 sztuki 6. Sklejka szalunkowa 21mm (ok. 1,5m kwadratowego) 7. Arduino Nano 3.0 8. Rasp Pi Zero W - 1szt 9. Zasilacz 12VDC, 24VDC, 48VDC - po kilka sztuk 10. Silnik krokowy NEMA23 - 4sztuki 11. Prowadnica liniowa 12mm - 3x400mm, 2x500mm, 2x200mm 12. Nakrętka śruby Tr10x2 - 3 sztuki 13. Uchwyty śruby - łożyskowane - 6 sztuk 14. Uchwyty prowadnic liniowych 12mm - 10szt 15. Wrzeciono 300W - 1 sztuka 16. Uchwyt wrzeciona 52mm - 1 sztuka 17. Sklejka szalunkowa 21mm z cięciem (formatki wg projektu) 18. Śruby wg potrzeb 19. Sterownik silnika krokowego - klon TB6600 3 sztuki Wykaz formatek ze sklejki: 500x400 1x - podstawa 542x350 2x - boki 400x59 1x - przód (pod montaż uchwytu śruby poruszającej stolik oś Y) 400x70 1x - tył (pod montaż uchwytu śruby poruszającej stolik oraz silnika krokowego oś Y) 400x200 1x - podstawa osi X 400x121 2x - tylne półki tworzące wnękę na elektronikę 390x280 1x - stolik 142x242 1x - podstawa osi Z 142x38 1x - dół podstawy osi Z (montaż łożyska śruby osi Z) 142x50 1x - góra podstawy osi Z (montaż łożyska śruby osi Z oraz silnika krokowego) 142x130 1x - oś Z (pod montaż wrzeciona) Soft - kontroler GRBL W moim przypadku, posiadam klon arduino nano z układem CH341 instaluję driver Arduino driver ch341ser tworzący wirtualny port COM do komunikacji z mikroprocesorem. Następnie oprogramowaniem Xloader wgrywamy soft na Arduino i gotowe. Soft - wysyłanie g-code do kontrolera GRBL Teraz potrzebny nam soft na PC do wysyłania komend dla naszego kontrolera GRBL. Soft jest zarówno pod windows jak i pod linuxa. Ja w tym celu wykorzystuję minikomputer Rasp Pi Zero W (zamiast stacjonarnego PC). Wykorzystanie Rasp Pi Zero W jako PC do wysyłania G-code niesie ze soba pewne następstwa. Zasięg Wi-fi okazał się mały ze względu na słabą antenkę w malinie. Dodatkowo wydajność 1 rdzeniowego PC z 512MB RAM jest mizerna. Z tego powodu testowałem wiele rozwiązań by wybrać najbardziej dla mnie optymalną wersję. Skończyło się na instalacji Raspbian Lite, doinstalowaniu lekkiego środowiska graficznego oraz serwera VNC (by w łatwy sposób przegrywać nowe g-code do wykonania). Testowałem 2 programy do obsługi frezarki z systemu linux maliny: 1. bCNC. 2. Universal Gcode Sender - ten program pozostawiłem. Po wgraniu oprogramowania na malinkę wystarczy podpiąć do malinki po USB Arduino z wgranym Grbl, wybrać port COM i połączy się z oprogramowaniem. Zobaczymy wtedy ustawienia konfiguracyjne naszego softu. Ich opis jest zależny od wersji. W moim wypadku Konfiguracja GRBL 0.9 Schemat elektryczny Poza schematem jest chińskie wrzeciono 300W, które załączam ręcznie. Prędkość jest sterowana z wykorzystaniem regulatora PWM 60VDC, 20A i zasilana napięciem 48VDC. Działanie Po wstępnej konfiguracji możemy przystąpić do testów naszego CNC. 1. Frezowanie napisów w płytkach plastikowych 2. Wyfrezowane płytki pod ESP8266 A oto filmiki z działania urządzenia: Podsumowanie Na pewno konstrukcja nie jest najlepsza, 3 prowadnice na jednej osi (wykorzystałem posiadane prowadnice i łożyska).Dość cienkie prowadnice, dodatkowo swobodnie wiszące. Przy pierwszych testach wyszło, iż śruba trapezowa na osi X jest do wymiany (na odcinku 100mm ma luz ponad 0,3mm). Pozostało zrobić osłony śrub trapezowych i prowadnic osi Y, w planach osłona z pleksy aby wióry nie rozsypywały się przy frezowaniu poza urządzenie. Być może później jakiś odciąg. Oczywiście pojawi się wyłącznik awaryjny oraz krańcówki. W sumie jestem zadowolony. Podstawowy cel - grawerowanie PCB wraz z wierceniem, wycinanie formatek ze sklejki i pleksy bezproblemowe. W razie dodatkowych pytań postaram się w miarę możliwości udzielić odpowiedzi. Jeśli ktoś chciałby dokładniejsze informacje na temat wykonania całości po polecam pobranie i przejrzenie pliku Frezarka CNC.zip (33 strony powinny zaspokoić ciekawość). Frezarka CNC.zip