Przeszukaj forum
Pokazywanie wyników dla tagów 'serwomotor'.
Znaleziono 1 wynik
-

Serwomechanizm Arduino - problem z utrzymaniem płynności ruchu
alshrom opublikował temat w Arduino i ESP
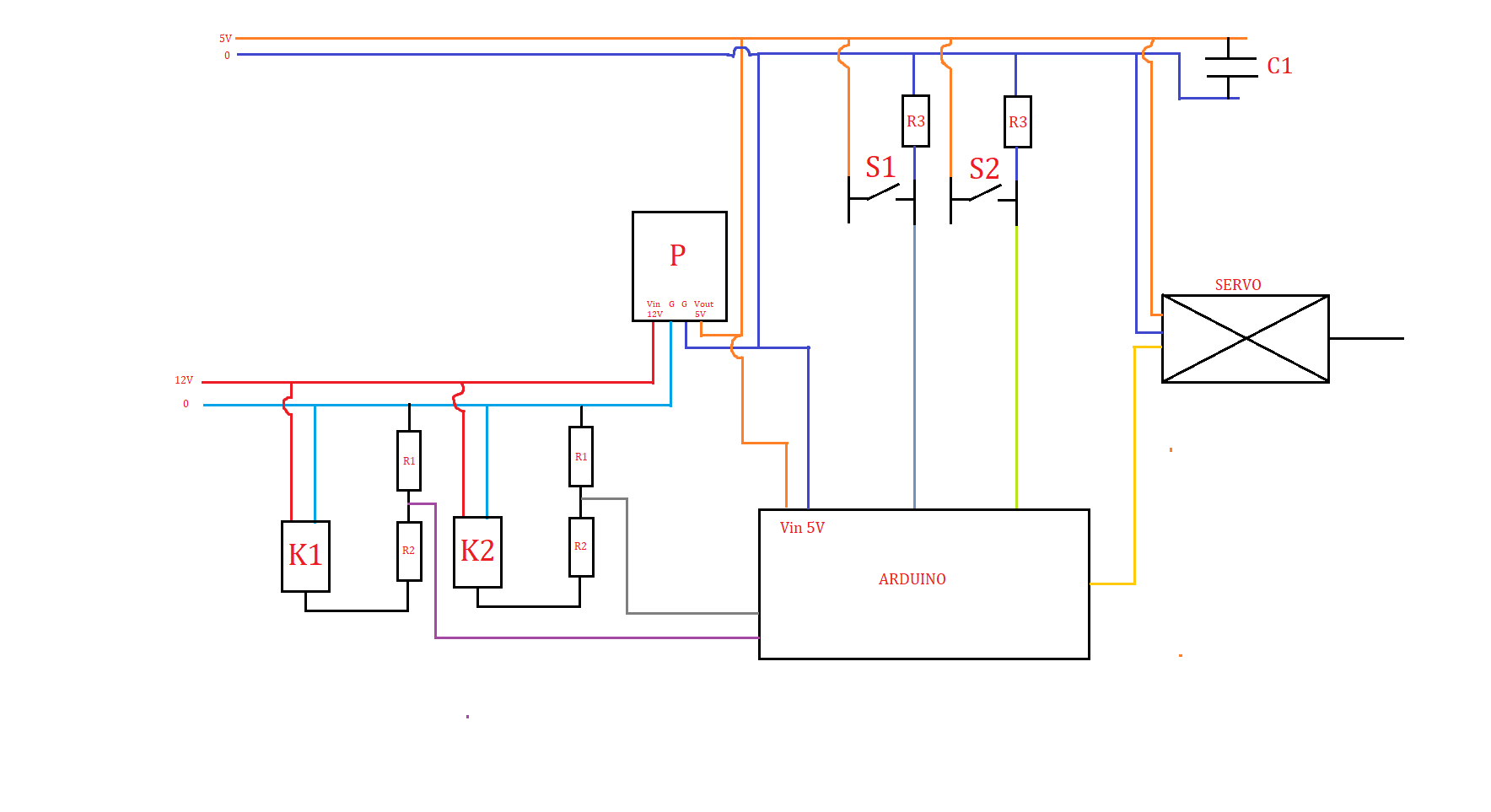
Cześć wszystkim. Udało mi się skompletować wszystkie potrzebne rzeczy do stworzenia pewnego mechanizmu. W skrócie mówiąc jest to mechanizm, który ma za zadanie po naciśnięciu przycisku otwierać klapkę. Pozycja otwarcia/zamknięcia klapki ustawiana jest za pomocą krańcówek. Niestety pojawił mi się problem z serwem (PowerHD LF-20MG-360 standard - praca ciągła 360 stopni). W momencie kiedy ma ono otwierać/zamykać klapkę potrafi nierówno pracować. Swój układ testowy zasilam z zasilacza ustawionego na 12V, ponieważ z takiego napięcia mam zasilane krańcówki. Reszta układu zasilana jest z przetwornicy 12V/5V (Pololu D24V22F5 - przetwornica step-down - 5V 2,5A). Spróbowałem sprawdzić, czy może pojedyncze elementy w moim układzie wpływają na pracę serwa. W tym celu napisałem program, który miał załączać serwo, gdy arduino otrzymywało sygnał albo z jakiegoś przycisku, albo z jakiejś krańcówki. Z każdego sygnału serwo chodziło równo. Niestety na docelowym programie serwo cały czas chodzi nierówno, a problem potęguje się jeżeli nastawię niską prędkość obrotową (np. 94 stopnie -serwo stoi przy 91*). Próbowałem naprawić problem poprzez wstawienie na wyjściu z przetwornicy kondensatora 470uF, ale jego obecność nic nie daje. Ostatecznie zauważyłem, że zmieniając wartość "delay" w kodzie programu udaje się trochę poprawić pracę serwo. Przy delay na poziomie 225ms serwo chodzi lepiej niż na 25ms, ale nadal nie jest to praca płynna. Ustawiając duże wartości delay, tracę możliwośc precyzyjnego sterowania klapką, bo zanim sygnał z krańcówki wyłączy serwo, to silnik nadal będzie się kręcił właśnie o tą wartość "delay". Poniżej przedstawiam swój kod, schemat układu i filmiki z pracy serwa (jeden na delay 25ms, drugi na 225ms). #include<Servo.h> Servo servo; void setup() { pinMode(10, INPUT); //przelacznik M pinMode(9, INPUT); //przelacznik D pinMode(8, INPUT); //krancowka na otwarciu pinMode(7, INPUT); //krancowka na zamknieciu pinMode(3, OUTPUT); //servo pin } void loop() { //ruch przesłony if(((digitalRead(10)==HIGH || digitalRead(9)==HIGH)&&(digitalRead(8)==LOW))) { servo.attach(3); servo.write(80); delay(25);} //servo otwiera przesłone else { digitalWrite(3,LOW);} //servo nie działa if((digitalRead(10)==LOW && digitalRead(9)==LOW && digitalRead(7)==LOW)) { servo.attach(3); servo.write(100); delay(25);} //servo zamyka przesłone else { digitalWrite(3,LOW);} //servo nie działa } Jeżeli filmiki są za mało wyraźne to postaram się je wrzucić w lepszej jakości. praca uklad.rar