Przeszukaj forum
Pokazywanie wyników dla tagów 'serwo'.
Znaleziono 10 wyników
-
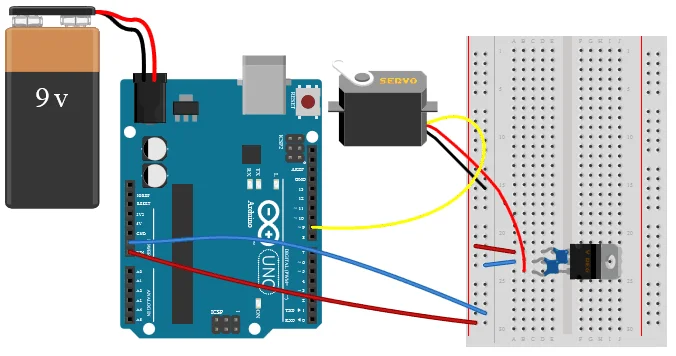
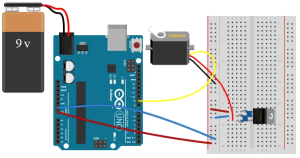
Witam. Gdy robię schemat załączony na obrazku i załączam poniższy kod, serwomechanizm działa przez jakiś czas, ale po czasie się wyłącza, a stabilizator się przegrzewa tak, że ledwo co mogę go dotknąć. Wie ktoś, czy powinno tak być, a jeśli nie, to czym to może być spowodowane i jak można temu zaradzić? #include <Servo.h> //Biblioteka odpowiedzialna za serwa Servo serwomechanizm; //Tworzymy obiekt, dzięki któremu możemy odwołać się do serwa void setup() { serwomechanizm.attach(9); //Serwomechanizm podłączony do pinu 9 } void loop() { serwomechanizm.write(0); delay(1000); serwomechanizm.write(120); //Wykonaj ruch delay(1000); serwomechanizm.write(40); delay(1000); }
-
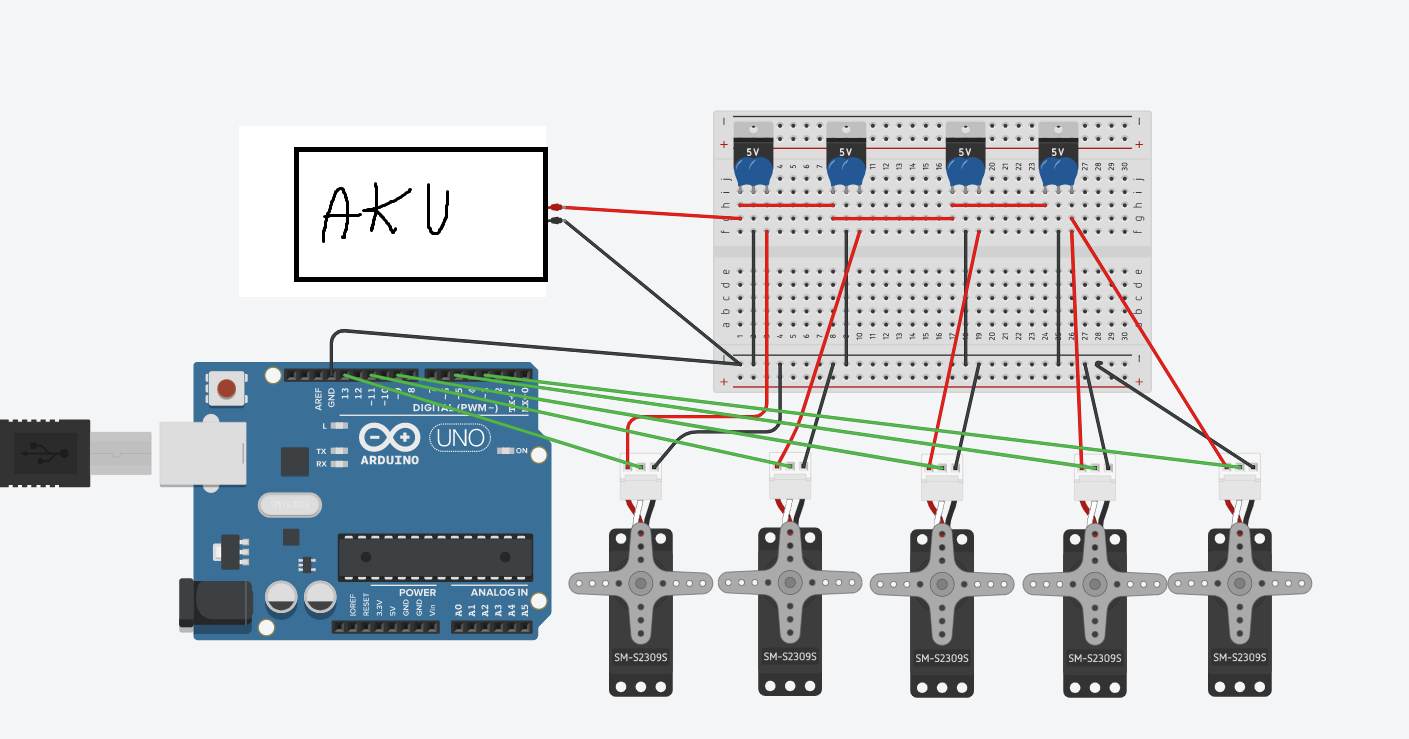
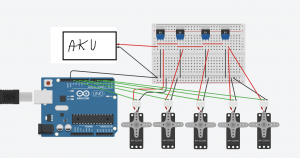
Witam, chcąc połączyć arduino uno, klawiaturę i 5 serwomechanizmów MG996R występują dziwne wariacje niektórych serwomechanizmów (nie zawsze tych samych).Po kilkukrotnym szybkim kliknięciu przycisków, zaczynało wariować. Miałem zaprogramowany przycisk, w którym wszystkie 5 serw pracuje w jednym momencie, wtedy jest największe zapotrzebowanie na prąd i po kilkukrotnej pracy serwomechanizmów, któreś (lub dwa) zawsze zaczynało się kręcić wokół własnej osi, bez końca. Początkowo zasilałem to baterią 9V (poprzez regulator napięcia 5V), wariowały. Stwierdziłem że potrzebny jest większy prąd, to podpiąłem to wszystko pod akumulator od ciągnika (oczywiście przez regulatory 5V), nadal to samo [w załączniku wstawiam zdjęcie połączenia, mam nadzieję że dobrze podłączam, albo tu tkwi problem?]. Potem, aby wyeliminować błędny kod, podpiąłem jedno serwo i potencjometr, na nowym kodzie (prostym) kręcąc potencjometrem, wszystko działało pięknie, lecz po jakichś 2 minutach zaczęło się kręcić w kółko. Nie mam pojęcia co może być przyczyną. Koncepcją główną jest sterowanie serwomechanizmami za pomocą zmiany rezystancji, więc w jednej chwili zazwyczaj będą pracowały wszystkie na raz. Potrzebuję pomocy i z góry dziękuję!
-

Serwomechanizm Arduino - problem z utrzymaniem płynności ruchu
alshrom opublikował temat w Arduino i ESP
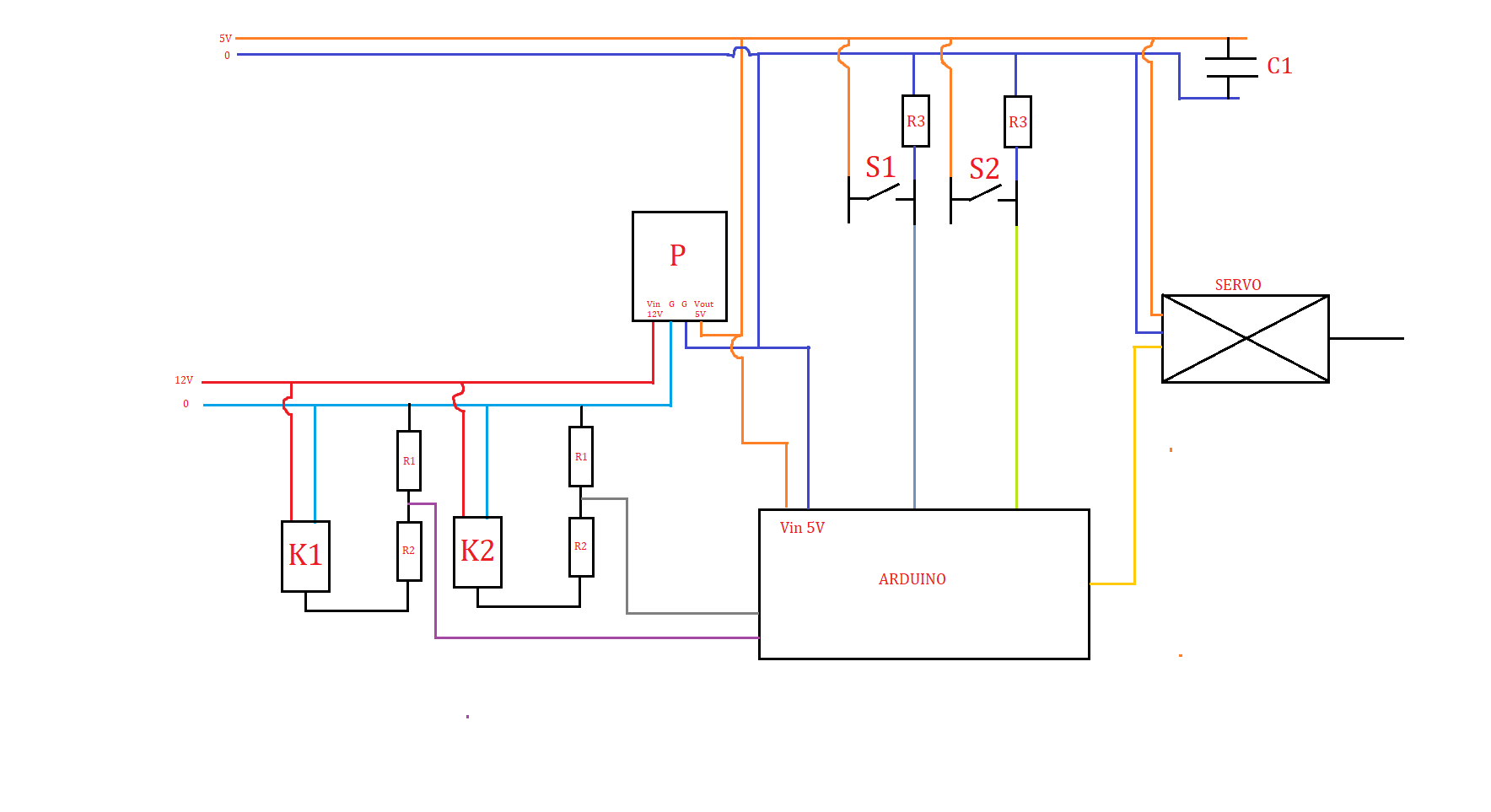
Cześć wszystkim. Udało mi się skompletować wszystkie potrzebne rzeczy do stworzenia pewnego mechanizmu. W skrócie mówiąc jest to mechanizm, który ma za zadanie po naciśnięciu przycisku otwierać klapkę. Pozycja otwarcia/zamknięcia klapki ustawiana jest za pomocą krańcówek. Niestety pojawił mi się problem z serwem (PowerHD LF-20MG-360 standard - praca ciągła 360 stopni). W momencie kiedy ma ono otwierać/zamykać klapkę potrafi nierówno pracować. Swój układ testowy zasilam z zasilacza ustawionego na 12V, ponieważ z takiego napięcia mam zasilane krańcówki. Reszta układu zasilana jest z przetwornicy 12V/5V (Pololu D24V22F5 - przetwornica step-down - 5V 2,5A). Spróbowałem sprawdzić, czy może pojedyncze elementy w moim układzie wpływają na pracę serwa. W tym celu napisałem program, który miał załączać serwo, gdy arduino otrzymywało sygnał albo z jakiegoś przycisku, albo z jakiejś krańcówki. Z każdego sygnału serwo chodziło równo. Niestety na docelowym programie serwo cały czas chodzi nierówno, a problem potęguje się jeżeli nastawię niską prędkość obrotową (np. 94 stopnie -serwo stoi przy 91*). Próbowałem naprawić problem poprzez wstawienie na wyjściu z przetwornicy kondensatora 470uF, ale jego obecność nic nie daje. Ostatecznie zauważyłem, że zmieniając wartość "delay" w kodzie programu udaje się trochę poprawić pracę serwo. Przy delay na poziomie 225ms serwo chodzi lepiej niż na 25ms, ale nadal nie jest to praca płynna. Ustawiając duże wartości delay, tracę możliwośc precyzyjnego sterowania klapką, bo zanim sygnał z krańcówki wyłączy serwo, to silnik nadal będzie się kręcił właśnie o tą wartość "delay". Poniżej przedstawiam swój kod, schemat układu i filmiki z pracy serwa (jeden na delay 25ms, drugi na 225ms). #include<Servo.h> Servo servo; void setup() { pinMode(10, INPUT); //przelacznik M pinMode(9, INPUT); //przelacznik D pinMode(8, INPUT); //krancowka na otwarciu pinMode(7, INPUT); //krancowka na zamknieciu pinMode(3, OUTPUT); //servo pin } void loop() { //ruch przesłony if(((digitalRead(10)==HIGH || digitalRead(9)==HIGH)&&(digitalRead(8)==LOW))) { servo.attach(3); servo.write(80); delay(25);} //servo otwiera przesłone else { digitalWrite(3,LOW);} //servo nie działa if((digitalRead(10)==LOW && digitalRead(9)==LOW && digitalRead(7)==LOW)) { servo.attach(3); servo.write(100); delay(25);} //servo zamyka przesłone else { digitalWrite(3,LOW);} //servo nie działa } Jeżeli filmiki są za mało wyraźne to postaram się je wrzucić w lepszej jakości. praca uklad.rar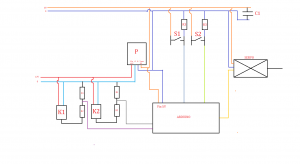
-
Cześć! Chciałbym się poradzić w zakresie doboru serwonapędu do pojazdu 4 kołowego ze wszystkimi kołami napędowymi. Mam obliczony wymagany moment napędowy pojazdu równy 80 Nm (czyli 20 Nm na koło). Moment określiłem na podstawie sumy oporów (toczenia, bezwładności, wzniesienia) dla skrajnych przypadków czyli maksymalne obciążenie, przyspieszenie i wzniesienie. Pomijam opór powietrza. I teraz stoję przed wyborem napędu. Przeglądam katalogi dostępnych serwonapędów z przekładniami i kołami w których występują dwa parametry: moment znamionowy (np 10 Nm) i maksymalny (np 30 Nm). Pytanie - na który patrzyć? 1. Mój obliczony wymagany moment musi być mniejszy niż moment znamionowy czy maksymalny wybranego serwa? 2. Czy dobrze rozumiem, że moment maksymalny może być osiągnięty tylko chwilowo np podczas ruszania (przyspieszania) na wzniesieniu? 3. Jeśli pojazd porusza się ze stałą prędkością po płaskim terenie, to wymagany moment będzie zdecydowanie mniejszy, bo potrzebny tylko do pokonania oporów toczenia? Jeśli poruszyłem oczywiste zagadnienia to przepraszam, dopiero zaczynam, proszę o wyrozumiałość Pozdrawiam!
-
Ahoj. Byłbym szaleńczo wdzięczny za sugestie od graczy bardziej doświadczonych w zasilaniu rzeczy rozmaitych. Chciałbym zmontować pojazd wymachujący ramieniem i zaopatrzyłem się w 10 serwomechanizmów, z których większości powinno wystarczyć 5V, ale kilku chętnie posłałbym 6V, jednemu nawet powyżej 7V, jeśli to ma zwiększyć ich udźwig. Powinny utrzymywać pozycję w razie obciążeń, więc zakładam, że to nie będą skromne miliampery. Przyglądam się takiej opcji jak Dualsky 11.1V 25C, bo rozumiem, że wersja 7.4V mogłaby nie wystarczyć, a o bateriach 9V nie czytam wiele dobrego w kwestii poboru prądu. Ale jakie byłyby opcje na rozprowadzenie takiej mocy do dalszej regulacji, nie walcząc z projektowaniem oryginalnego PCB? Czy sterowniki + Arduino + osobne baterie to najlepsze wyjście z mniej skomplikowanych? Bo tu ładowanie tego wszystkiego na bagażnik brzmi trochę brutalnie. Chciałbym się ograniczać i z przestrzenią, i kosztami, i czasochłonnością rozwiązań. Nawet jeśli mistrzować jakiś PCB, to też wypadałoby to potestować w fazie programowania, a mój substytut Arduino nie daje rady zasilić nawet jednego serwa. Czy nie byłoby szans, by taki układ z jednym akumulatorem, regulatorami, mikrokontrolerami, modułem Bluetooth itd., polutować na takim wynalazku jak płytka uniwersalna? (I czy w takim wypadku istnieje jakiś stabilizator dla serwa 6–8.4V, które może pociągnąć pewnie i z 4A?)
-
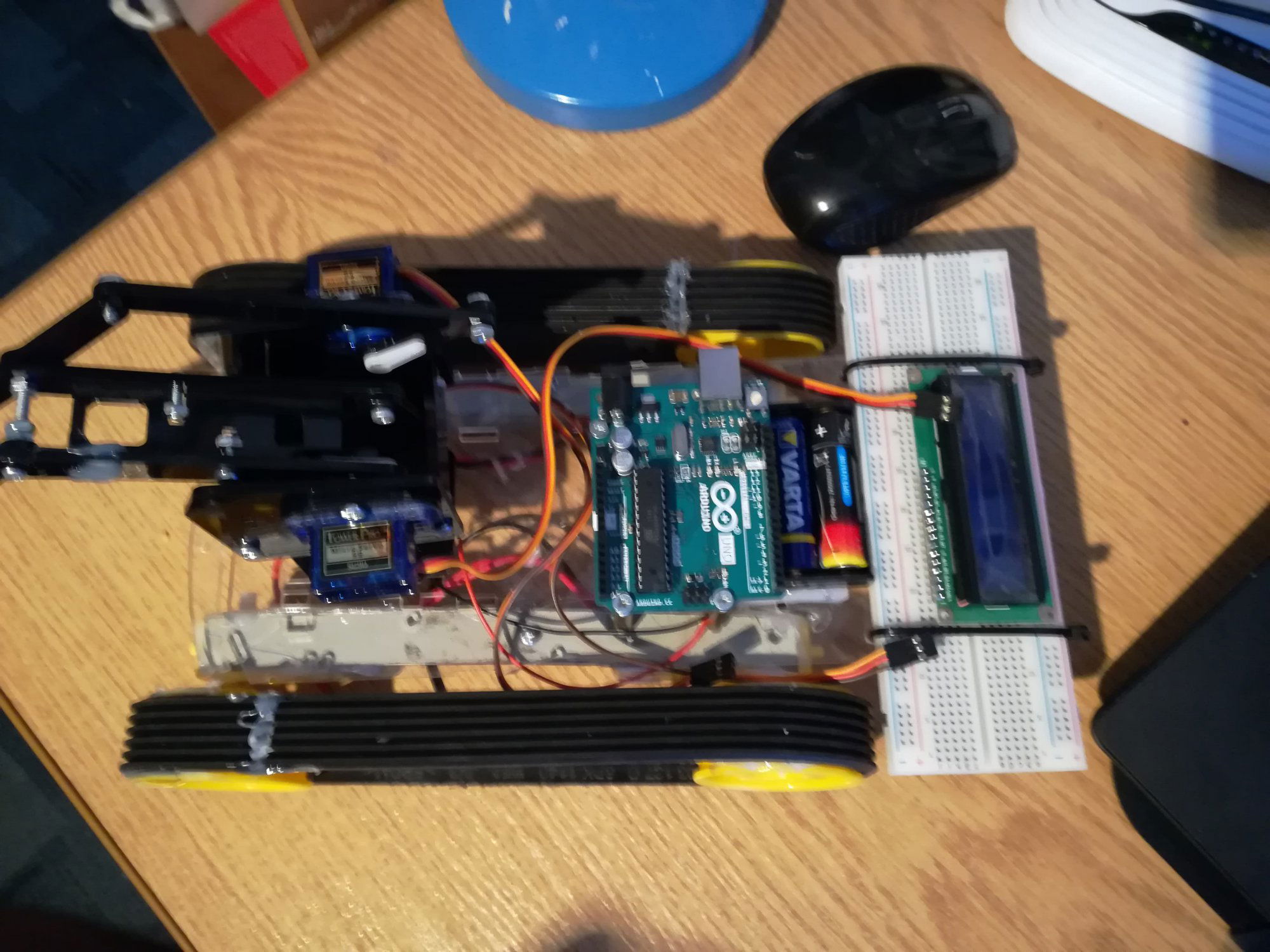
Witam, razem z kolegami ze studiów w ramach projektu budujemy auto z ramieniem robota sterowane przez bluetooth. Całość będzie oparta na arduino UNO Rev3 (zdjęcie modelu w załączniku). I z związku z tym chcemy zakupić sterownik do silników do którego będziemy mogli podpiąć 4 silniki DC (po 2 silniki połączymy szeregowo po lewej jak i prawej stronie aby było możliwie skręcanie, przez co potrzebujemy 2 wejść) oraz 4 serwomechanizmy. I własnie chciałbym dostać od was radę jakiego dokładnie sterownika powinniśmy się zaopatrzyć. Oczywiście już się oglądaliśmy za konkretnymi przykładami jednakże chcieliśmy przed dokonaniem zakupu doradzić się bardziej doświadczonych osób. Z góry dziękuję za każdą pomoc z waszej strony.

-
Witam. Buduje prostego robota w oparciu o raspberry pi. Mam jednak problem z doborem zasilania. Potrzebuje zasilać 2 silniki DC takie jak te https://botland.com.pl/pl/silniki-dc-katowe-z-przekladnia/3696-kolo-silnik-65x26mm-5v-z-przekladnia-481.html?gclid=CjwKCAjw44jrBRAHEiwAZ9igKMMfJOrrwR5y_ZYuCCrQwjapiS6siamgHvAAKlLFejbmxRnYjZc6dBoCKNMQAvD_BwE, oraz dwa micro serwomechanizmy sg90. Postanowiłem że wykorzystam akumulator li-pol. I teraz mam pytanie czy li-pol 2C nie spali silników DC gdy podłącze je przez ten sterownik https://botland.com.pl/pl/sterowniki-silnikow-moduly/3164-l298n-dwukanalowy-sterownik-silnikow-modul-12v2a.html ? Kolejne pytanie dotyczy serwomechanizmów, czy napięcie 7.4V z li-pola nie będzie dla nich za duże? Czy użycie takiego stabilizatora https://botland.com.pl/pl/regulatory-napiecia/3092-stabilizator-5v-l7805cv-tht-to220.html pomogło by w dostarczeniu odpowiedniego napięcia? Czy jest w ogóle możliwość aby silniki DC zasilać z 7.4v bezpośrednio, natomiast serwa z wyjścia tego stabilizatora? Dodam jeszcze że raspberry pi jest zasilane osobno z powerbanka. Z góry dziękuję za wszelką pomoc.
-
Witam Jestem bardziej niż początkującym w tematach mikrokontrolerów i elektroniki, więc proszę o wyrozumiałość. Od jakiegoś czasu planuje zrobić robota wykorzystującego czujnik ultradźwiękowy (między innymi) do mapowania terenu. Ale dopiero od paru dni zacząłem szperać i czytać jak to zrobić krok po kroku. Ha. Nawet znalazłem coś podobnego na forum https://forbot.pl/forum/topic/11454-prosty-ultradzwiekowy-skaner-otoczenia-2d-360-stopni/ Rozbiłem się już na początkowych pytaniach, ale w tym temacie chciałbym zapytać konkretnie o jeden z nich: 1. Mianowicie jeżeli mam już arduino (z kursu arduino, który do teraz zbierał u mnie kurz) to co mi jest potrzebne prócz serwa pracy ciągłej do zbudowania obrotowej wieżyczki na której będą zamontowane czujniki ultradźwiękowe? Rozumiem, że zależy od serwa, ale łączy się je przez shieldy, albo tworzy się jakieś układy, albo zasila niezależnie od arduino? Czy to przez pobór prądu? 2. Czy dostępne w różnych sklepach ( botland, kamami) shieldy do silników obsłużą też serwo? Czy muszę mieć konkretnie shield ze sterownikiem serw? 3. Czy jeżeli servo będzie miało duży pobór prądu to nie zakłóci w jakiś sposób pracy czujników? Wiem, że pytania banalne, ale może Panowie potraficie mnie choć naprowadzić na trop. Sam w miarę czasu i możliwości w chwilach wolnych od roboty staram się szperać po książkach i necie, ale temat niby prosty a jednak masę wiedzy należy sobie gdzieś ze szkoły przypomnieć, a większości przypadków od zera się uczyć.
-
Mam problem z połączeniem kodu ardiunu. Napisałem działający kod na sterowanie dwoma silnikami przez mostek, oraz kod na sterowanie dwoma serwo. Kody te osobno działają lecz przy próbach połączenia kodów nic nie działa. Dopiero zaczynam programować w arduino. Wiem że to pewnie prosta sprawa dla kogoś kto już troche w tym siedzi ale to dla mnie początki. Pierwszy kod do sterowania silnikami: https://pastebin.com/eLdFuPBV?fbclid=IwAR2gle7I_ltJhNnZ5NYrGbPog7Eu33zzu-CwV8DazjPd6IxyswPJcXlZ5yw Kod do sterowania dwoma serwo: https://pastebin.com/Dmhz6TwH?fbclid=IwAR1jieyCyECJCqomrRivB8H0d_qAJRlPoy9_m85_Xi1HhayHlehIvkObiZA Schemat połączenia :

-
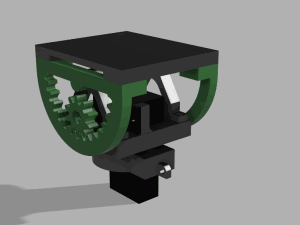
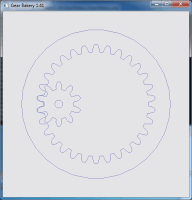
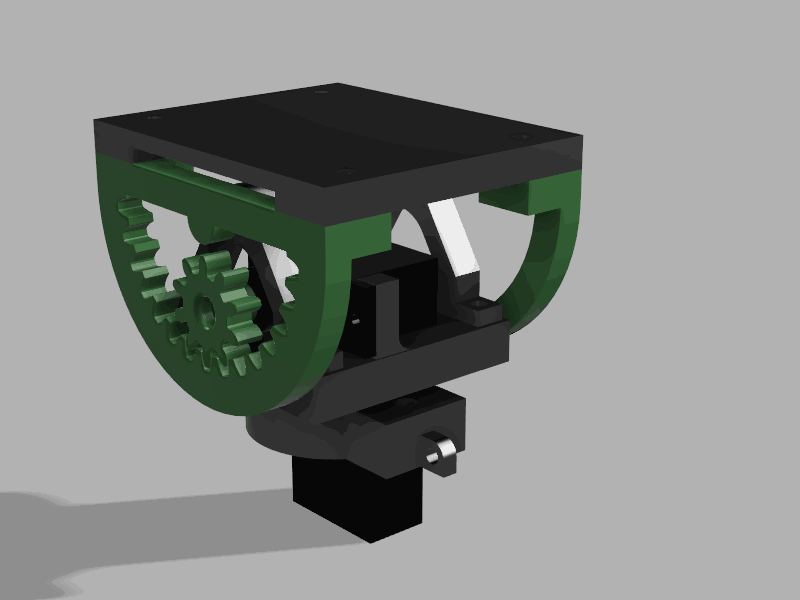
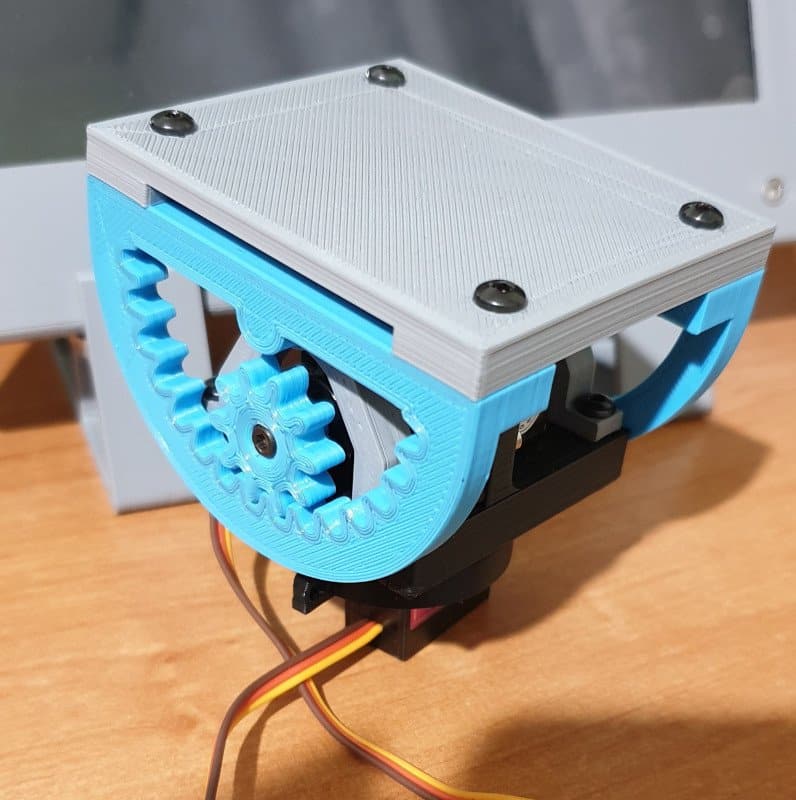
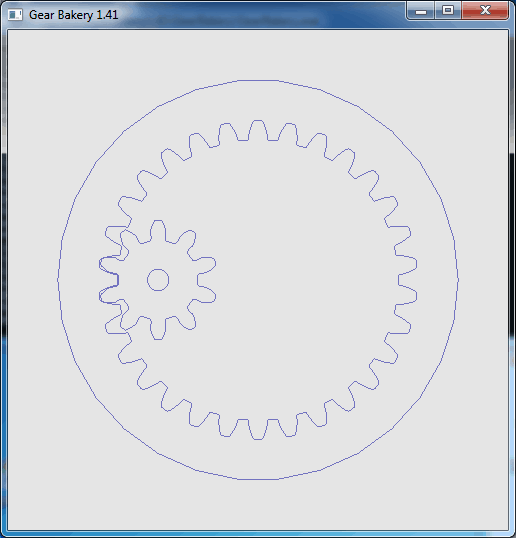
Raport mniejszości Oglądaliście kiedyś ten film? Główny bohater posługiwał się tam futurystycznym (przynajmniej jak na tamte czasy) interfejsem, którym sterował przy pomocy gestów. Fragment, który mam na myśli, możecie obejrzeć na Youtube. Osiągnięcie takiego poziomu zaawansowania wymaga oczywiście lat pracy, ale możemy spróbować skonstruować urządzenie, które będzie namiastką opisanego powyżej interfejsu. Koncepcja Zbudujemy urządzenie typu pan-tilt, czyli platformę obracającą się w dwóch osiach, sterowaną serwami. Sterowanie odbywać się będzie zdalnie, poprzez przechylanie telefonu komórkowego - platforma będzie próbowała naśladować gesty wykonywane przy pomocy telefonu. Platforma Na początku sama platforma - zdecydowałem się zaprojektować własną od zera, bazując na projekcie znalezionym na Thingiverse. Obrót w osi poziomej jest zmniejszony przez zębatkę - pozwala ona mniej więcej na 1/3 oryginalnego zakresu ruchu, ale za to jest on bardziej płynny. Obrót wokół osi pionowej jest natomiast nieograniczony. Pewnym kłopotem okazały się zębatki - przygotowanie dobrego koła zębatego wbrew pozorom wcale nie jest tak prostym zadaniem, jakim mogłoby się wydawać. Co więcej, nie ma również zbyt dużo narzędzi pozwalających na wygenerowanie prawidłowych kół zębatych. Po długich poszukiwaniach udało mi się jednak odnaleźć odpowiednie narzędzie - umożliwia ono konstruowanie kół zewnętrznych, wewnętrznych oraz listew zębatych: Gear Bakery. Wygenerowane koła zębate zapisywane są jako pliki .dxf, a te można już bez problemu wciągnąć do Fusion 360. Założyłem, że platforma będzie obracana zwykłymi, małymi serwami modelarskimi. Docelowo planowałem postawić na niej co najwyżej sportową kamerkę, więc moment rzędu 1.8 kg*cm jest tu całkowicie wystarczający. Pozostało wymodelowanie i wydrukowanie części, z których złożyłem potem platformę. Kontroler Tym razem potrzebowałem trochę więcej mocy obliczeniowej niż w wypadku prostszych projektów - w końcu musiałem postawić serwer odbierający dane po UDP - zdecydowałem się więc na Raspberry Pi. Serwer napisałem w Pythonie, bo język ten jest stosunkowo wysokopoziomowy i mocno separuje programistę od warstwy systemu i sprzętu: mogłem dzięki temu skupić się na istocie zadania, a nie na detalach implementacyjnych. Raspberry ma jednak pewną wadę - nie za dobrze radzi sobie z generowaniem sygnału PWM - sprzętowo może robić to tylko na jednym pinie. Co gorsza, standardowa biblioteka RPi.GPIO pozwala jedynie na programowe generowanie PWM - nie dawało to zbyt dobrych efektów. Na szczęście problem ten można bardzo elegancko obejść. Firma Adafruit przygotowała bowiem cwany układzik, który pozwala na sterowanie przy pomocy PWM aż dwunastoma niezależnymi urządzeniami, natomiast komunikacja tego układu z Raspberry odbywa się już po moim ulubionym protokole, czyli I2C. Układ ten rozwiązał jeszcze jeden problem, którego istnienie uświadomiłem sobie tak naprawdę w momencie, gdy właśnie zniknął. Serwa trzeba przecież jakoś zasilić, a nie można podłączyć ich do pinu 5V Raspberry - mają przecież znacznie większe zapotrzebowanie prądowe. PCA9685 w tym celu wyprowadza jednak szybkozłączkę, do której można podpiąć zewnętrzne zasilanie. Za każdym razem, gdy potrzebuję gdzieś 5V, zwykle robię mały przekręt: korzystam z kontrolera silnika bezszczotkowego, do którego przylutowałem wtyczkę T-Dean. Oprócz tego - co oczywiste - że ESC służy do sterowania silnikiem, obniża on również napięcie do 5V i przekazuje przewodami, które normalnie podłącza się do odbiornika RC. W pierwotnym zamyśle mechanizm ten nosił nazwę BEC - Battery Eliminator Circuit - i pozwalał w łatwy sposób zasilić odbiornik RC bez użycia dodatkowego akumulatora. Tymczasem wystarczy ominąć pin sterowania i mamy mały, wygodny, mobilny zasilacz na 5V. Konfiguracja Raspberry Aby mój skrypt w Pythonie uruchomił się, konieczne jest doinstalowanie biblioteki Adafruit pozwalającej na sterowanie kontrolerem PCA9685. Na początku trzeba oczywiście włączyć szynę I2C; robimy to w oknie konfiguracji Raspberry. Potem upewniamy się, że zainstalowane są następujące pakiety: sudo apt-get install python-smbus sudo apt-get install i2c-tools Po zainstalowaniu i2c-tools możemy użyć programiku i2cdetect, żeby sprawdzić, czy Raspberry prawidłowo wykrył kontroler PCA9685: ~ $ sudo ic2detect -y 1 0 1 2 3 4 5 6 7 8 9 a b c d e f 00: -- -- -- -- -- -- -- -- -- -- -- -- -- 10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 40: 40 -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 70: 70 -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- Teraz możemy ściągnąć i zainstalować bibliotekę do Pythona. sudo apt-get install build-essential python-dev cd ~ git clone https://github.com/adafruit/Adafruit_Python_PCA9685.git cd Adafruit_Python_PCA9685 sudo python setup.py install Uruchamiamy Do uruchomienia całego urządzenia potrzebujemy dwóch kawałków kodu, jednego mniejszego, drugiego większego. Tym mniejszym jest serwer w Pythonie, który steruje serwami. Możecie go ściągnąć z mojego repozytorium albo po prostu przekleić, bo jego kod jest stosunkowo krótki: # -*- coding: utf-8 -*- import socket import sys import time import Adafruit_PCA9685 # Częstotliwość sterowania PWM FREQUENCY = 50 # Czas jednego cyklu CYCLE_TIME = 1 / float(FREQUENCY) # Procentowy czas cyklu dla położenia minimalnego SERVO_MIN_PERCENT = 0.00055 / CYCLE_TIME # Procentowy czas cyklu dla położenia maksymalnego SERVO_MAX_PERCENT = 0.00245 / CYCLE_TIME # Wartość minimalna dla 4096 kroków SERVO_MIN = int(4096 * SERVO_MIN_PERCENT) # Wartość maksymalna dla 4096 kroków SERVO_MAX = int(4096 * SERVO_MAX_PERCENT) # Tworzymy obiekt pwm (przyjmie domyślnie adres 0x40) pwm = Adafruit_PCA9685.PCA9685() pwm.set_pwm_freq(FREQUENCY) def setAngle(channel, angle): pwm.set_pwm(channel, 0, int(SERVO_MIN + (float(angle) / 180.0) * (SERVO_MAX - SERVO_MIN))) def processCommand(command): angles = command.split("|") angles = list(map(lambda x: max(-90, min(90, -int(x.strip()))) + 90, angles)) print("P: {0}, Y: {1}".format(angles[0], angles[2])) setAngle(14, int(angles[0] / 10) * 10) setAngle(15, int(angles[2] / 10) * 10) def main(): # Create TCP/IP socket sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM) # Bind the socket to the port server_address = ('', 10000) sock.bind(server_address) print("Waiting for data...") buffer = "" try: while True: data, addr = sock.recvfrom(32); buffer = buffer + data commandEnd = buffer.find(";") if (commandEnd != -1): command = buffer[0:commandEnd] buffer = buffer[commandEnd+1:] processCommand(command) except KeyboardInterrupt: print('Ctrl+C received, closing...') # Start program main() Drugi program jest już większy - to aplikacja na Androida, która pozwala na podłączenie się do serwera i przesyłanie informacji o orientacji telefonu. Ta również dostępna jest w moim repozytorium, tylko tym razem trzeba kod już ściągnąć i przebudować w Android Studio. Efekt Końcowy efekt na zdjęciu będzie wyglądał marnie, dlatego przygotowałem krótki filmik prezentujący, jak uruchomić cały projekt i jakie są efekty jego działania: Wnioski Serwa są bardzo wygodne w montażu i obsłudze, ale niestety również mało precyzyjne. Do takiego prostego projektu nadają się świetnie, ale w warunkach produkcyjnych trzeba byłoby wymienić je na ciche i dokładne silniki bezszczotkowe - takie, jakie są używane w gimbalach. Platforma reaguje na specyficzne ułożenie komórki; dzieje się tak dlatego, że komórka obrót wokół osi pionowej wysyła jako odchylenie od północy (0 stopni to północ). Tymczasem platforma "nie wie", w którą stronę jest zwrócona. Aby projekt był bardziej uniwersalny, można zastosować jedno z dwóch rozwiązań: dodać czujnik orientacji do platformy i kompensować różnice albo zapamiętać ułożenie komórki podczas łączenia do serwera i uznać je za pozycję "zerową". Mojemu projektowi daleko oczywiście do zaprezentowanego rozwiązania w "Raporcie mniejszości", ale nie ukrywam, że dał mi sporo frajdy. Można wykorzystać go jako bazę do zdalnego sterowania położeniem kamery lub na przykład ramienia robota.