dórzy92
-
Zawartość
19 -
Rejestracja
-
Ostatnio
-
Wygrane dni
3
Osiągnięcia użytkownika dórzy92
")





-
 Cześć! Sprzedam moduł Adafruit Feather 32u4 Bluefruit LE 4.1 - zgodny z Arduino użyty do projektu na obronę magisterską. Odpowiadał za komunikację z tabletem. Jedyne ślady użytkowania modułu to przylutowane goldpiny (zgodnie z opisem producenta). Moduł całkowicie sprawny, dokładam baterię modelarską LI-Pol 3,7 V do zasilania tego urządzenia. Posiadam na niego paragon (zdjęcie) Dokładny opis oraz miejsce zakupu: https://botland.com.pl/plytki-zgodne-z-arduino-adafruit/6566-adafruit-feather-32u4-bluefruit-le-41-zgodny-z-arduino.html Cena zawiera w sobie koszt przesyłki. Mogę wystawić na allegro. Możliwy odbiór osobisty na terenie Krakowa Oddam za 105 PLN, jeżeli ktoś ma jakieś inne propozycje to zapraszam do kontaktu. Link do aukcji na OLX ze zdjęciami: https://www.olx.pl/oferta/modul-adafruit-feather-32u4-bluefruit-le-4-1-CID99-IDlkSCo.html
Cześć! Sprzedam moduł Adafruit Feather 32u4 Bluefruit LE 4.1 - zgodny z Arduino użyty do projektu na obronę magisterską. Odpowiadał za komunikację z tabletem. Jedyne ślady użytkowania modułu to przylutowane goldpiny (zgodnie z opisem producenta). Moduł całkowicie sprawny, dokładam baterię modelarską LI-Pol 3,7 V do zasilania tego urządzenia. Posiadam na niego paragon (zdjęcie) Dokładny opis oraz miejsce zakupu: https://botland.com.pl/plytki-zgodne-z-arduino-adafruit/6566-adafruit-feather-32u4-bluefruit-le-41-zgodny-z-arduino.html Cena zawiera w sobie koszt przesyłki. Mogę wystawić na allegro. Możliwy odbiór osobisty na terenie Krakowa Oddam za 105 PLN, jeżeli ktoś ma jakieś inne propozycje to zapraszam do kontaktu. Link do aukcji na OLX ze zdjęciami: https://www.olx.pl/oferta/modul-adafruit-feather-32u4-bluefruit-le-4-1-CID99-IDlkSCo.html -
Cześć, nie mogę sobie poradzić z czymś takim: Mam kod do komunikacji z aplikacją Androidową. Wszystko działa poprawnie, jednak za kazdym razem jak wyśle coś do Adafruita to zadana akcja wykonuje się tylko raz. Potrzebuję zrobić funkcję, która będzie działać w pętli - do czasu pozyskania nowej akcji przez bluetootha.Jak to przerobić? Mój kod: /********************************************************************* Program do robota SECUNDO *********************************************************************/ #include <string.h> #include <Arduino.h> #include <SPI.h> #if not defined (_VARIANT_ARDUINO_DUE_X_) && not defined (_VARIANT_ARDUINO_ZERO_) #include <SoftwareSerial.h> #endif #include "Adafruit_BLE.h" #include "Adafruit_BluefruitLE_SPI.h" #include "Adafruit_BluefruitLE_UART.h" #include "BluefruitConfig.h" #define FACTORYRESET_ENABLE 1 #define MINIMUM_FIRMWARE_VERSION "0.6.6" #define MODE_LED_BEHAVIOUR "MODE" /*=========================================================================*/ /* ...hardware SPI, using SCK/MOSI/MISO hardware SPI pins and then user selected CS/IRQ/RST */ Adafruit_BluefruitLE_SPI ble(BLUEFRUIT_SPI_CS, BLUEFRUIT_SPI_IRQ, BLUEFRUIT_SPI_RST); /* ...software SPI, using SCK/MOSI/MISO user-defined SPI pins and then user selected CS/IRQ/RST */ //Adafruit_BluefruitLE_SPI ble(BLUEFRUIT_SPI_SCK, BLUEFRUIT_SPI_MISO, // BLUEFRUIT_SPI_MOSI, BLUEFRUIT_SPI_CS, // BLUEFRUIT_SPI_IRQ, BLUEFRUIT_SPI_RST); void error(const __FlashStringHelper*err) { Serial.println(err); while (1); } // function prototypes over in packetparser.cpp uint8_t readPacket(Adafruit_BLE *ble, uint16_t timeout); float parsefloat(uint8_t *buffer); void printHex(const uint8_t * data, const uint32_t numBytes); extern uint8_t packetbuffer[]; String message; String action; /**************************************************************************/ /*! @brief Sets up the HW an the BLE module (this function is called automatically on startup) */ /**************************************************************************/ void setup(void) { while (!Serial); // required for Flora & Micro delay(500); /*ALL PINS*/ Serial.begin(115200); Serial.println(F("Adafruit Bluefruit App Controller Example")); Serial.println(F("-----------------------------------------")); /* Initialise the module */ Serial.print(F("Initialising the Bluefruit LE module: ")); if ( !ble.begin(VERBOSE_MODE) ) { error(F("Couldn't find Bluefruit, make sure it's in CoMmanD mode & check wiring?")); } Serial.println( F("OK!") ); if ( FACTORYRESET_ENABLE ) { Serial.println(F("Performing a factory reset: ")); if ( ! ble.factoryReset() ) { error(F("Couldn't factory reset")); } } ble.echo(false); Serial.println("Requesting Bluefruit info:"); ble.info(); Serial.println(F("Please use Adafruit Bluefruit LE app to connect in Controller mode")); Serial.println(F("Then activate/use the sensors, color picker, game controller, etc!")); Serial.println(); ble.verbose(false); // debug info is a little annoying after this point! while (! ble.isConnected()) { delay(500); } Serial.println(F("******************************")); // LED Activity command is only supported from 0.6.6 if ( ble.isVersionAtLeast(MINIMUM_FIRMWARE_VERSION) ) { Serial.println(F("Change LED activity to " MODE_LED_BEHAVIOUR)); ble.sendCommandCheckOK("AT+HWModeLED=" MODE_LED_BEHAVIOUR); } Serial.println( F("Switching to DATA mode!") ); ble.setMode(BLUEFRUIT_MODE_DATA); Serial.println(F("******************************")); } /**************************************************************************/ /*! @brief Constantly poll for new command or response data */ /**************************************************************************/ void loop(void) { uint8_t len = readPacket(&ble, BLE_READPACKET_TIMEOUT); if (len == 0) return; // Buttons if (packetbuffer[1] == 'B') { uint8_t buttnum = packetbuffer[2] - '0'; boolean pressed = packetbuffer[3] - '0'; String num = String(buttnum); if (pressed) { action = " pressed"; } else { action = " released"; } message = "Button " + num + action; Serial.println("Message: " + message); } if(action != " released"){ if(message == "Button 1 pressed"){ programMode1(); }else if(message == "Button 5 pressed"){ Serial.println("5"); }else if(message == "Button 6 pressed"){ Serial.println("6"); }else if(message == "Button 7 pressed"){ Serial.println("7"); }else if(message == "Button 8 pressed"){ Serial.println("8"); }else if(message == "Button 2 pressed"){ Serial.println("2"); } }else{ Serial.println("released"); } } void programMode1() { Serial.println("In mode 1"); } Chciałbym aby funkcja programMode1() wykonywała się do czasu odebrania nowych danych przez bluetooth. Pomożecie?
-
Witam! Zostały mi czujniki z niezrealizowanego projektu.Czujniki te były użyte kilka razy ale są w pełni sprawne.Przesyłkę biorę na siebie. 1) Czujnik analog SHARP 4-30 cm--[25 PLN], 1 sztuka http://botland.com.pl/analogowe-czujniki-odleglosci/23-sharp-gp2y0a41sk0f-analogowy-czujnik-odleglosci-4-30cm-.html 2) Czujnik analog SHARP 10-80 cm+kabelek--[30 PLN], 1 sztuka http://botland.com.pl/analogowe-czujniki-odleglosci/29-sharp-gp2y0a21yk0f-analogowy-czujnik-odleglosci-10-80cm.html 3) Czujnik cyfrowy SHARP 10 cm--[20 PLN], 1 sztuka http://botland.com.pl/cyfrowe-czujniki-odleglosci/1623-sharp-gp2y0d810z0f-cyfrowy-czujnik-odlegl-10cm-z-podstawka-pcb.html Zapraszam!
-
[Sprzedam] Nieaktualne
dórzy92 odpisał w temacie użytkownika dórzy92 • Sprzedam/Kupię/Zamienię/Praca
Tak,jest to wersja z krótkim wałem. Silniki już niestety sprzedane.Może będę miał jeszcze jeden taki zestaw to wystawię tutaj. Post do zamknięcia -
Witam! Mam do zaoferowania NOWE silniki Pololu 10:1, kupione tutaj: http://botland.com.pl/high-power-hp/15-silnik-pololu-hp-10-1.html wraz z mocowaniami: http://botland.com.pl/mocowania/36-mocowania-do-micro-silnikow-pololu-czarne-2-szt.html Nie są mi już potrzebne, ponieważ zrezygnowałem z pewnego projektu.Zestaw oddam za 100 PLN - wartość tego zestawu to ok. 140 PLN.Przesyłkę biorę na siebie,mogę wystawić na allegro.
-
Witam! Sprzedaję pozostałości po pracy inżynierskiej.Wszystkie z nich są NOWE,nie użyte ani raz.W nawiasach podaję cenę,przesyłkę biorę na siebie.Podaję linki do cen i opisów danych elementów.Dla zainteresowanych mogę podesłać "real photo" lub wystawić daną rzecz na allegro.Zapraszam, bo taniej nowych rzeczy nie dostaniecie 1) Li-pol 1000mAh Turnigy+złącze--[40 PLN], 1 sztuka http://www.sklep.modelarnia.pl/index.php?p6866,pakiet-1000mah-2s-30c-turnigy 2) Wyświetlacz LCD 4x20 znaków niebieskich--[40 PLN], 1 sztuka http://botland.com.pl/wyswietlacze-alfanumeryczne/1015-wyswietlacz-lcd-4x20-znakow-niebieski.html Proszę o kontakt prywatną wiadomością lub mailem: [email protected] Pozdrawiam!
-
Nowa inicjatywa: daj się poznać na zawodach! - Przypinki FORBOTa
dórzy92 odpisał w temacie użytkownika Treker • Dyskusje o FORBOT.pl
PRZYPINKA-dórzy92-Dominik Również będę w Rzeszowie -
Witam! Sprzedam nowy zestaw STM32 Value line discovery z procesorem STM32F100. Cena- 60 zł plus koszty wysyłki Wszelkie pytania i propozycje- priv
-
[Zawody] RobotChallenge 2014 - Największe zawody robotów w Europie
dórzy92 odpisał w temacie użytkownika Treker • Wydarzenia
Dzięki za info W takim razie już się rejstruję i jadę -
[Zawody] RobotChallenge 2014 - Największe zawody robotów w Europie
dórzy92 odpisał w temacie użytkownika Treker • Wydarzenia
A line followery bez turbiny mają rację bytu na tych zawodach?Można wystartować? -
Bezpośrednie połączenie Attiny2313 oraz Atmega32
dórzy92 odpisał w temacie użytkownika dórzy92 • Mikrokontrolery
Dzięki za odpowiedzi,biorę się zatem do projektowania!Pozdrawiam! -
Witam! Buduję LF i chciałbym połączyć na nim ze sobą dwa mikrokontrolery: Attiny2313 odbierające sygnały w RC5 i wystawiający odpowiednie stany na dwie nóżki połączone z Atmegą 32.Sama Atmega odczytuje stany na tych dwóch nóżkach i wykonuje swój program.Czy takie rozwiązanie spowoduje jakieś problemy w działaniu całego robota?
-
Ok,dzięki za podpowiedź
-
Bardzo fajnie usłyszeć takie słowa,jednakże chyba nie ma aż takiego szału,żeby uważać się za coś więcej niż początkującego Jeżeli admin również tak uważa to proszę o przeniesienie,chyba że sam mogę to zrobić (a jak tak to po prostu jeszcze raz opisać konstrukcję czy jest jakiś łatwiejszy sposób?)
-
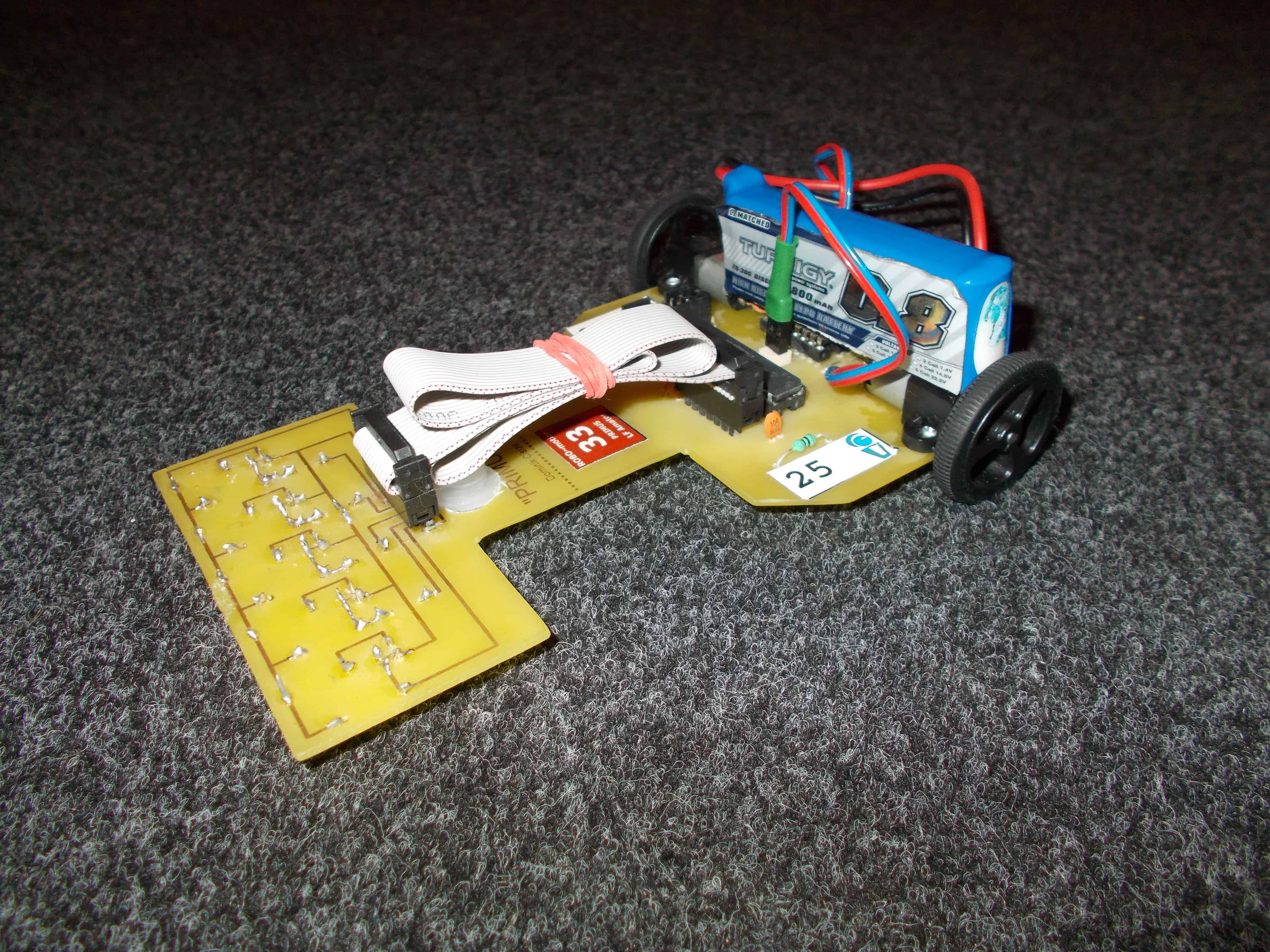
Witam! Wielokrotnie czytywałem opisy robotów znajdujące się na forum,ich osiągnięcia na zawodach i zawsze chciałem zbudować podobna konstrukcje. Jednakże zadawałem sobie jedno pytanie-czy osoba całkowicie zielona w tematach związanych z elektronika i programowaniem ma jakakolwiek szanse na zbudowanie czegoś takiego oraz start w zawodach. Jak się okazało kilka miesięcy później- jest to wykonalne i wcale nie takie trudne jak się wydawało. Dlatego chciałem przedstawić Wam mojego pierwszego robota typu Line follower, o przewidywalnej nazwie „PRIMUS” (z łac. Pierwszy).Nie jest to może konstrukcja najwyższych lotów (korzystałem z dostępnych materiałów co widać chociażby po taśmie która potrzebna mi była w innym projekcie,nie chciałem jej przycinać),pełno w niej błędów ale jak na pierwszy raz- myślę ze nie można się bez tego obyć. Krótko o elektronice: Schemat elektroniczny wykonałem samodzielnie w programie Eagle, opierając się o wiedzą dostępna w internecie oraz na kilku książkach. Do sterowania robotem użyłem mikrokontrolera Atmega 8 z ustawionym taktowaniem wewnętrznym 8MHz do którego podpiąłem 5 czujników odbiciowych CNY70 oraz popularny mostek H (L293D) do sterowania silnikami. Czujniki zostały ułożone co 10mm, w linii prostej co jak się okazało dopiero na na zawodach nie było dobrym pomysłem Całość zasilana jest bateria LI-POL TURNIGY 0,8 mAh 7,4 V bo taką akurat miałem dostępną.Redukcja napięcia odbywa się poprzez stabilizator liniowy L7805. Strona mechaniczna: Moduł z czujnikami oraz płytka z resztą komponentów zostały wycięte ręcznie z jednego kawałka laminatu o grubości 1,5 mm. Sprawiło to że robocik jest bardzo sztywny ale niestety zyskuje niepotrzebnie na wadze. Do napędu użyłem znanych wszystkim silniczków z przekładniami Pololu HP 30:1 ,które są wg mnie strzałem w dziesiątkę jeżeli chodzi o tego typu konstrukcje.Do silniczków zamontowałem dedykowane opony Pololu o średnicy 32 mm, które również spełniają moje oczekiwania. Jako trzeci punkt podparcia użyłem ballcastera plastikowego,z którym musiałem troszkę pokombinować bo nijak nie chciał współpracować. Program: Był to mój największy problem,jako ze nie miałem nigdy styczności z żadnym językiem programowania.Znajomi podsunęli mi C więc zacząłem się uczyć Program jest w miarę prosty,nie zawiera skomplikowanych algorytmów,jest wzorowany na kodach źródłowych znalezionych w różnych publikacjach. W załączniku umieszczam kod programu, może komuś się takowy przyda.Jeżeli chodzi o schematy to proszę pisać-również udostępnię.Sam wiem jak ciężko jest samemu wystartować bez przykładowych projektów i kodów źródłowych. Na chwilę obecną startowałem w zawodach w Rzeszowie oraz w Krakowie na AGH ale nie udało mi się odnieść jakiś spektakularnych zwycięstw(ale zawsze w pierwszej 10).Trzeba poprawić kilka rzeczy,tak jak pisałem na wstępie ale nie zmienia to faktu,że jestem z tej konstrukcji w miarę zadowolony. I na koniec filmik: PS: Wiem,że jakoś zdjęć nie powala ale chwilowo nie mam nic innego jak komórka pod ręką... PRIMUS kod.txt