Przeszukaj forum
Pokazywanie wyników dla tagów 'ArduinoUNO'.
Znaleziono 3 wyniki
-
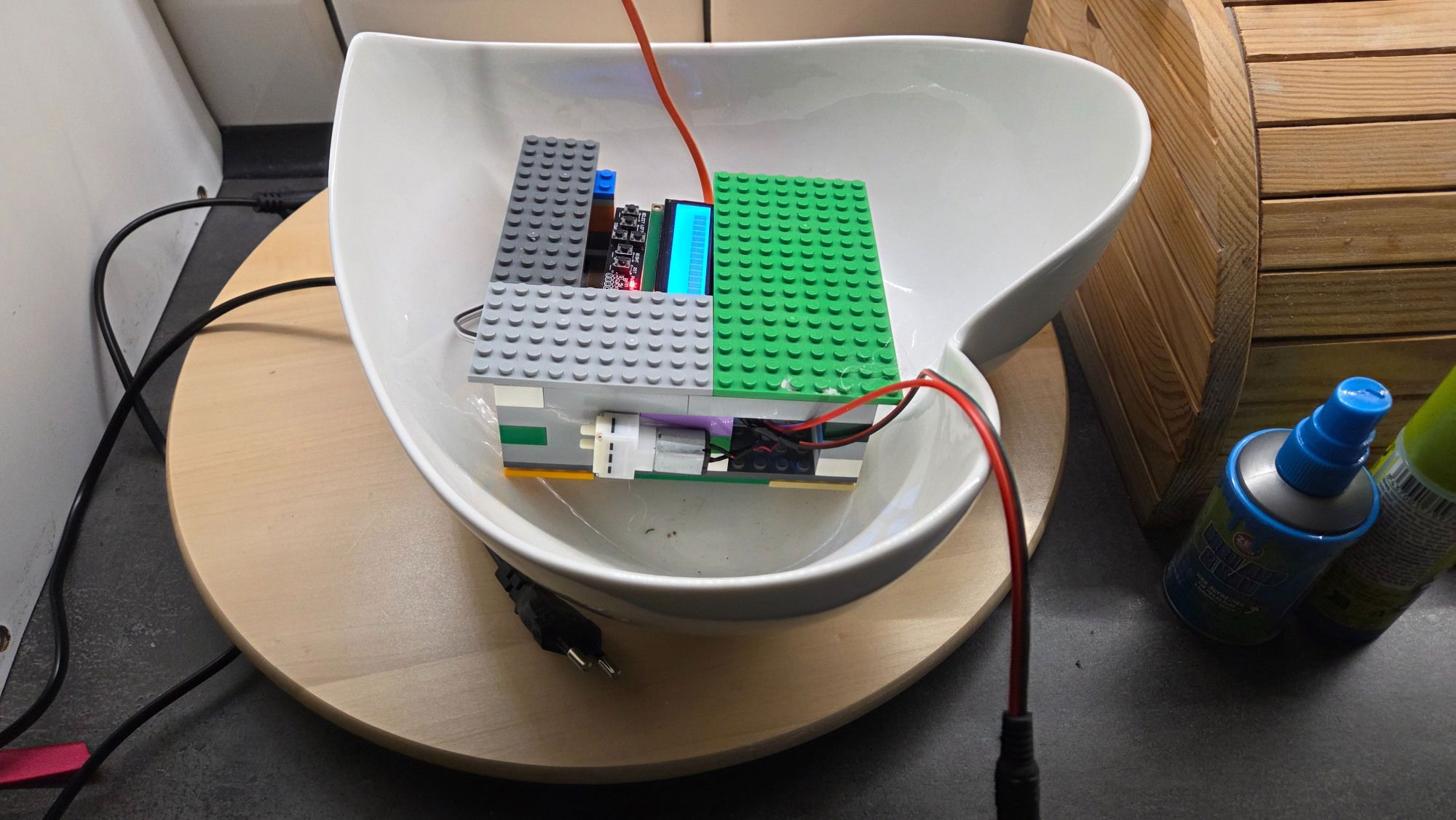
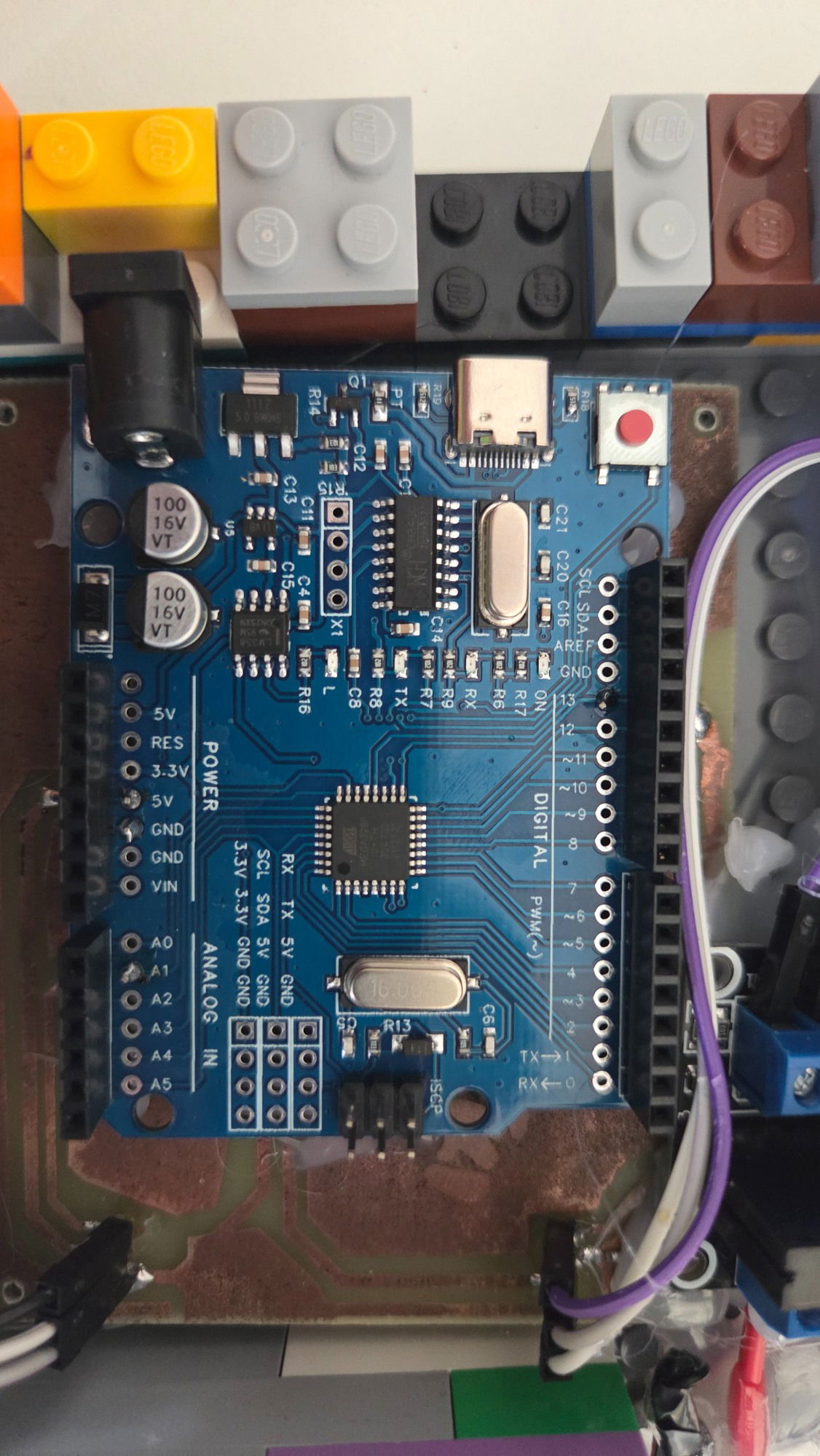
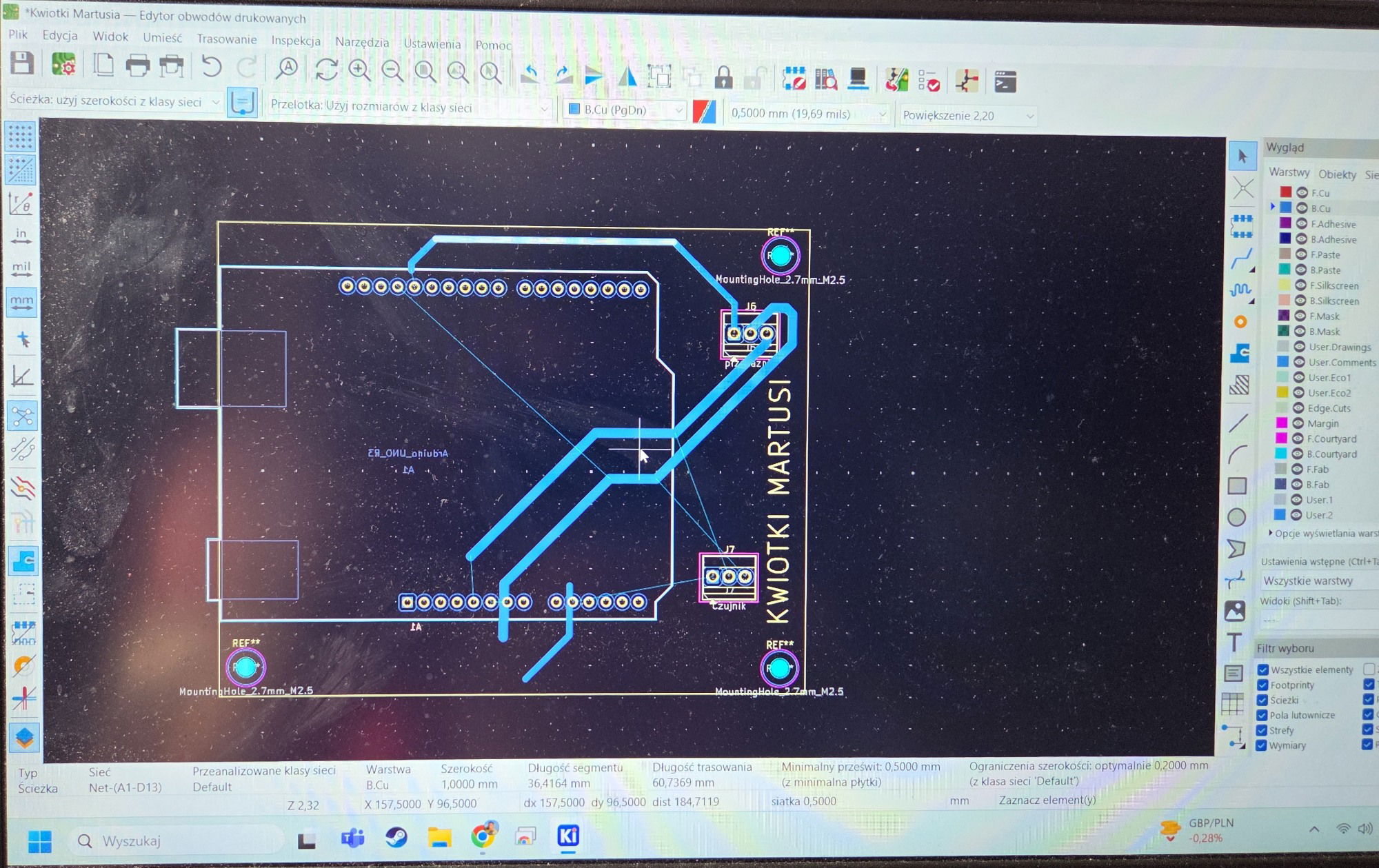
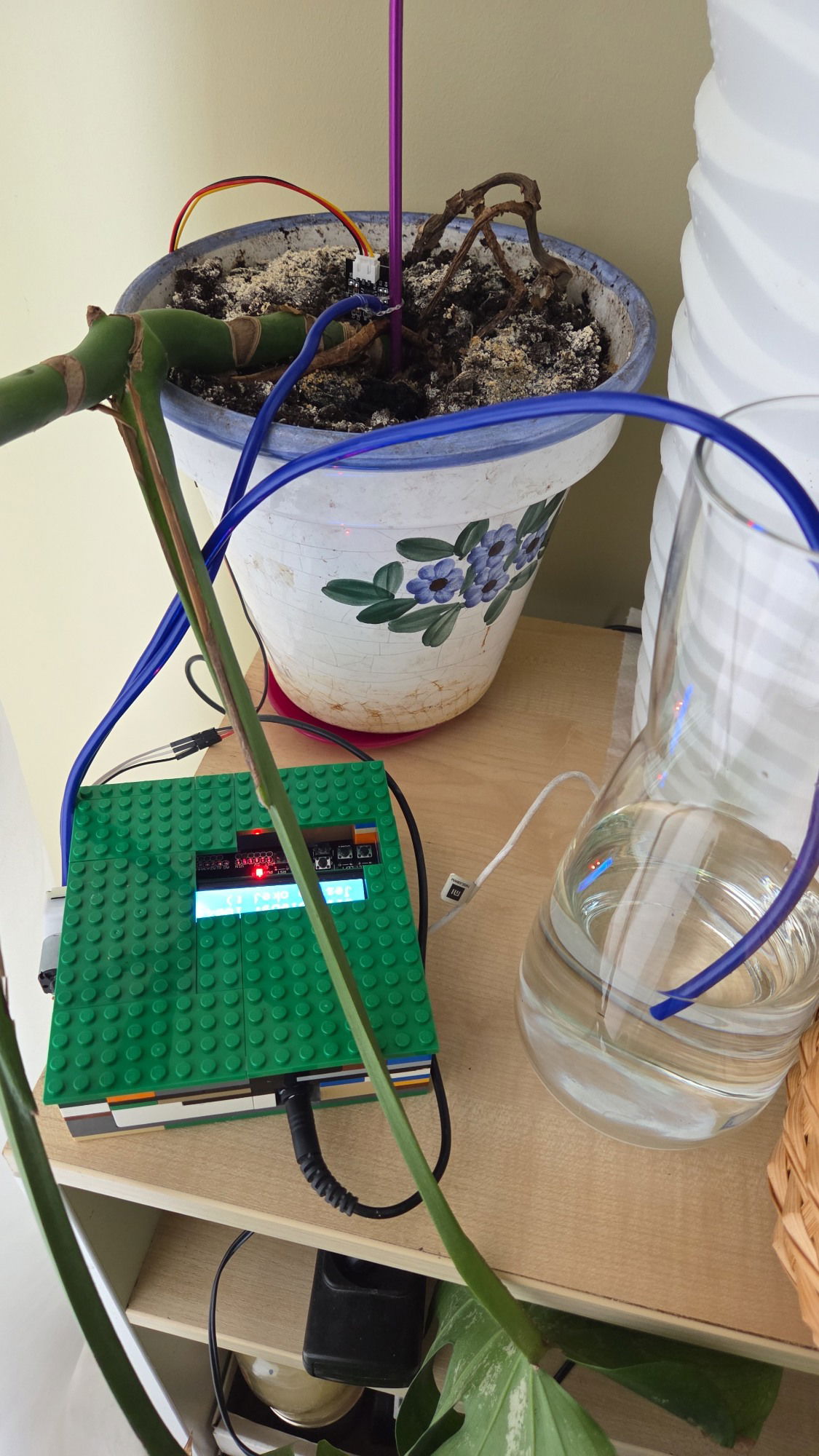
 Chciałem się dzisiaj pochwalić moim ostatnim projektem, który powstał z prostej potrzeby, a przerodził się w całkiem zaawansowany system. Wiecie, jak to jest – lato, wyjazdy, albo po prostu zapominalstwo. Kwiatki w domu szybko to odczuwają. Pomyślałem sobie: "A gdyby tak zrobić coś, co podleje je za mnie?". No i tak to się zaczęło – budowa automatycznego sterownika nawadniania opartego na Arduino! Skąd pomysł i co to w ogóle jest? Pomysł wziął się z bolączki każdego właściciela roślin – jak zapewnić im optymalne warunki, kiedy nas nie ma albo kiedy po prostu inne obowiązki pochłaniają czas. Chciałem stworzyć system, który nie tylko włączy pompkę "na sztywno", ale będzie aktywnie monitorował wilgotność gleby i podlewał roślinę tylko wtedy, gdy będzie to naprawdę potrzebne, i to do konkretnego, zdrowego poziomu wilgotności. Chodziło mi o elastyczność i pełną kontrolę, dlatego postawiłem na Arduino. Mój projekt to w zasadzie asystent: Monitoruje wilgotność gleby w czasie rzeczywistym. Włącza pompkę wody, gdy gleba staje się zbyt sucha. Podlewa iteracyjnie (małymi porcjami), aż do osiągnięcia optymalnego poziomu wilgotności (u mnie to 95%). Płynnie pokazuje status i odczyty na wygodnym wyświetlaczu LCD. Pozwala na ręczną interwencję i zmianę ustawień za pomocą wbudowanych przycisków. Jakie moduły wykorzystałem? Sercem układu jest płytka Arduino Uno – w moim przypadku okazało się, że to klon z portem USB-C i układem CH340, co było małym zaskoczeniem, ale zadziałało. Do komunikacji z komputerem używam nowoczesnego USB-C, co jest bardzo wygodne. Do obsługi interfejsu użytkownika wykorzystałem: Moduł wyświetlacza LCD 16x2 z 5 przyciskami (LEFT, RIGHT, UP, DOWN, SELECT): To ciekawe rozwiązanie, bo wszystkie te przyciski są podłączone do jednego pinu analogowego Arduino (A0). Różne wartości rezystancji dla każdego przycisku pozwalają Arduino odczytać, który został naciśnięty. To pozwala na: Przełączanie trybów wyświetlania (aktualna wilgotność, ustawiony próg, ustawiony czas pompowania). Zmianę wartości progu wilgotności (u mnie regulacja co 5%). Zmianę czasu trwania pojedynczej porcji pompowania (u mnie co 1 sekundę). Ręczne włączanie/wyłączanie pompki (przycisk LEFT). Za pomiar wilgotności odpowiada analogowy czujnik wilgotności gleby (typowy, dwuprzewodowy). Podłączyłem go do pinu analogowego A1. Jego kalibracja była kluczowa! Do sterowania pompką wodną używam modułu przekaźnika. Jest to niezbędne, bo pompka potrzebuje więcej mocy, niż Arduino może dostarczyć bezpośrednio. Jak przebiegła budowa i jakie problemy napotkałem? Budowę zacząłem od podstaw: uruchomienie Arduino, potem podłączenie wyświetlacza, a na końcu czujnika i przekaźnika. Kalibracja czujnika wilgotności była pierwszym wyzwaniem – trzeba było dokładnie zmierzyć, jakie wartości zwraca czujnik w glebie całkowicie suchej i całkowicie mokrej. Te wartości (u mnie to 557 dla sucho i 240 dla mokro) są sercem przeliczania na procenty. Później doszły przyciski. Okazało się, że moje 5 przycisków jest podłączonych do jednego pinu analogowego (A0). Spędziłem trochę czasu na precyzyjnym zmierzeniu zakresów wartości analogowych dla każdego z nich (0-50 dla RIGHT, 50-150 dla UP itd.). Największym problemem, z którym się mierzyłem (i z którym pewnie wielu z Was się spotkało), było "zamrażanie" wyświetlacza podczas podlewania. Początkowo używałem funkcji delay(), która, jak się okazało, wstrzymuje całe działanie mikrokontrolera. Oznaczało to, że podczas podlewania wyświetlacz nie odświeżał się, a przyciski nie reagowały. Rozwiązaniem okazało się przejście na programowanie asynchroniczne z wykorzystaniem funkcji millis(). To była spora przebudowa kodu i wprowadzenie maszyny stanów, która zarządza cyklem podlewania (monitorowanie, pauza przed pompowaniem, pompowanie, pauza po pompowaniu na wsiąknięcie) bez blokowania programu. Dzięki temu, nawet gdy pompka działa, mogę nadal zmieniać tryby na wyświetlaczu i widzieć aktualne dane. Jaki efekt udało się osiągnąć? Efekt końcowy jest naprawdę zadowalający! Mam sterownik, który dba o moje rośliny w sposób inteligentny. Gdy wilgotność spadnie poniżej ustalonego progu (np. 40%), system rozpoczyna cykl nawadniania. Podlewa małymi porcjami (u mnie 5-sekundowymi), a po każdej porcji czeka 20 sekund, żeby woda wsiąkła i czujnik mógł się zaktualizować. Robi to tak długo, aż wilgotność osiągnie 95% (mój cel nasycenia). Co najważniejsze, po osiągnięciu 95%, system "odpuszcza" i czeka, aż wilgotność ponownie spadnie poniżej 40%, zanim rozpocznie kolejny cykl. To zapobiega przelewaniu i zapewnia roślinom odpowiednią wilgotność. Wyświetlacz na bieżąco pokazuje status: aktualną wilgotność, czy jest "okej", czy "podlewa...", a nawet odlicza czas w trybie "wsiąkania wody". Przyciski dają pełną kontrolę nad ustawieniami i ręcznym podlewaniem. Obudowę zrobiłem z klocków lego, bo akurat tylko to miałem w posiadaniu Mam nadzieję, że mój projekt zainspiruje Was do własnych eksperymentów! Elektronika to świetna zabawa, a tworzenie czegoś praktycznego daje mnóstwo satysfakcji. Chętnie odpowiem na wszelkie pytania!
Chciałem się dzisiaj pochwalić moim ostatnim projektem, który powstał z prostej potrzeby, a przerodził się w całkiem zaawansowany system. Wiecie, jak to jest – lato, wyjazdy, albo po prostu zapominalstwo. Kwiatki w domu szybko to odczuwają. Pomyślałem sobie: "A gdyby tak zrobić coś, co podleje je za mnie?". No i tak to się zaczęło – budowa automatycznego sterownika nawadniania opartego na Arduino! Skąd pomysł i co to w ogóle jest? Pomysł wziął się z bolączki każdego właściciela roślin – jak zapewnić im optymalne warunki, kiedy nas nie ma albo kiedy po prostu inne obowiązki pochłaniają czas. Chciałem stworzyć system, który nie tylko włączy pompkę "na sztywno", ale będzie aktywnie monitorował wilgotność gleby i podlewał roślinę tylko wtedy, gdy będzie to naprawdę potrzebne, i to do konkretnego, zdrowego poziomu wilgotności. Chodziło mi o elastyczność i pełną kontrolę, dlatego postawiłem na Arduino. Mój projekt to w zasadzie asystent: Monitoruje wilgotność gleby w czasie rzeczywistym. Włącza pompkę wody, gdy gleba staje się zbyt sucha. Podlewa iteracyjnie (małymi porcjami), aż do osiągnięcia optymalnego poziomu wilgotności (u mnie to 95%). Płynnie pokazuje status i odczyty na wygodnym wyświetlaczu LCD. Pozwala na ręczną interwencję i zmianę ustawień za pomocą wbudowanych przycisków. Jakie moduły wykorzystałem? Sercem układu jest płytka Arduino Uno – w moim przypadku okazało się, że to klon z portem USB-C i układem CH340, co było małym zaskoczeniem, ale zadziałało. Do komunikacji z komputerem używam nowoczesnego USB-C, co jest bardzo wygodne. Do obsługi interfejsu użytkownika wykorzystałem: Moduł wyświetlacza LCD 16x2 z 5 przyciskami (LEFT, RIGHT, UP, DOWN, SELECT): To ciekawe rozwiązanie, bo wszystkie te przyciski są podłączone do jednego pinu analogowego Arduino (A0). Różne wartości rezystancji dla każdego przycisku pozwalają Arduino odczytać, który został naciśnięty. To pozwala na: Przełączanie trybów wyświetlania (aktualna wilgotność, ustawiony próg, ustawiony czas pompowania). Zmianę wartości progu wilgotności (u mnie regulacja co 5%). Zmianę czasu trwania pojedynczej porcji pompowania (u mnie co 1 sekundę). Ręczne włączanie/wyłączanie pompki (przycisk LEFT). Za pomiar wilgotności odpowiada analogowy czujnik wilgotności gleby (typowy, dwuprzewodowy). Podłączyłem go do pinu analogowego A1. Jego kalibracja była kluczowa! Do sterowania pompką wodną używam modułu przekaźnika. Jest to niezbędne, bo pompka potrzebuje więcej mocy, niż Arduino może dostarczyć bezpośrednio. Jak przebiegła budowa i jakie problemy napotkałem? Budowę zacząłem od podstaw: uruchomienie Arduino, potem podłączenie wyświetlacza, a na końcu czujnika i przekaźnika. Kalibracja czujnika wilgotności była pierwszym wyzwaniem – trzeba było dokładnie zmierzyć, jakie wartości zwraca czujnik w glebie całkowicie suchej i całkowicie mokrej. Te wartości (u mnie to 557 dla sucho i 240 dla mokro) są sercem przeliczania na procenty. Później doszły przyciski. Okazało się, że moje 5 przycisków jest podłączonych do jednego pinu analogowego (A0). Spędziłem trochę czasu na precyzyjnym zmierzeniu zakresów wartości analogowych dla każdego z nich (0-50 dla RIGHT, 50-150 dla UP itd.). Największym problemem, z którym się mierzyłem (i z którym pewnie wielu z Was się spotkało), było "zamrażanie" wyświetlacza podczas podlewania. Początkowo używałem funkcji delay(), która, jak się okazało, wstrzymuje całe działanie mikrokontrolera. Oznaczało to, że podczas podlewania wyświetlacz nie odświeżał się, a przyciski nie reagowały. Rozwiązaniem okazało się przejście na programowanie asynchroniczne z wykorzystaniem funkcji millis(). To była spora przebudowa kodu i wprowadzenie maszyny stanów, która zarządza cyklem podlewania (monitorowanie, pauza przed pompowaniem, pompowanie, pauza po pompowaniu na wsiąknięcie) bez blokowania programu. Dzięki temu, nawet gdy pompka działa, mogę nadal zmieniać tryby na wyświetlaczu i widzieć aktualne dane. Jaki efekt udało się osiągnąć? Efekt końcowy jest naprawdę zadowalający! Mam sterownik, który dba o moje rośliny w sposób inteligentny. Gdy wilgotność spadnie poniżej ustalonego progu (np. 40%), system rozpoczyna cykl nawadniania. Podlewa małymi porcjami (u mnie 5-sekundowymi), a po każdej porcji czeka 20 sekund, żeby woda wsiąkła i czujnik mógł się zaktualizować. Robi to tak długo, aż wilgotność osiągnie 95% (mój cel nasycenia). Co najważniejsze, po osiągnięciu 95%, system "odpuszcza" i czeka, aż wilgotność ponownie spadnie poniżej 40%, zanim rozpocznie kolejny cykl. To zapobiega przelewaniu i zapewnia roślinom odpowiednią wilgotność. Wyświetlacz na bieżąco pokazuje status: aktualną wilgotność, czy jest "okej", czy "podlewa...", a nawet odlicza czas w trybie "wsiąkania wody". Przyciski dają pełną kontrolę nad ustawieniami i ręcznym podlewaniem. Obudowę zrobiłem z klocków lego, bo akurat tylko to miałem w posiadaniu Mam nadzieję, że mój projekt zainspiruje Was do własnych eksperymentów! Elektronika to świetna zabawa, a tworzenie czegoś praktycznego daje mnóstwo satysfakcji. Chętnie odpowiem na wszelkie pytania!



-
Napisałem prosty program, którego zadaniem jest wyświetlaniu na ośmioelementowej listwie LED dowolnego wzoru i jego przesuwanie. //Dołączenie biblioteki obsługującej linijkę led #include <Adafruit_NeoPixel.h> //dedklaracja pinów i stałych const int ledPin = A0; const int ledCount = 8; //ilość LED w linijce const int patCount = 3; //ilość elementów wzoru do wyświetlania //deklaracja tablicy wyświetlanego wzoru unsigned long pattern[patCount]; bool start = true; //flaga używana w instrukcji if , start = true dla początkowego wzoru, start = false dla kolejnych wzorów //Konfiguracja linijki Adafruit_NeoPixel linijka = Adafruit_NeoPixel(ledCount, ledPin, NEO_GRB + NEO_KHZ800); void setup() { //Inicjalizacja linijki linijka.begin(); linijka.show(); } void loop() { //definiowanie wyświetlanego wzoru unsigned long red = linijka.Color(30, 0, 0); unsigned long blue = linijka.Color(0, 0, 30); unsigned long green = linijka.Color(0, 30, 0); unsigned long magenta = linijka.Color(30, 0, 30); unsigned long pattern[patCount]; // ponowna deklaracja, bez której program nie działa if (start) { //wypełnienie linijki kolejnymi elementami wzoru unsigned long pattern[] = {blue, blue, red}; for (int id = 0; id < ledCount; id=id+patCount) { for (int m = 0; m < patCount; m++) { linijka.setPixelColor(m+id, pattern[m]); } } //wyświetlenie linijki linijka.show(); delay(150); start = false; } else { //zmiana wzoru - przesunięcie o jeden element w górę, element ostatni staje się pierwszym unsigned long tempVal = pattern[patCount-1]; for (int i=patCount-1; i>0; i--) { pattern[i] = pattern[i-1]; } pattern[0]=tempVal; //wypełnienie linijki kolejnymi elementami wzoru for (int id = 0; id < ledCount; id=id+patCount) { for (int m = 0; m < patCount; m++) { linijka.setPixelColor(m+id, pattern[m]); } } //wyświetlenie linijki linijka.show(); delay(150); } } Program nie jest skomplikowany, wymaga zdefiniowania kolorów: //definiowanie wyświetlanego wzoru unsigned long red = linijka.Color(30, 0, 0); unsigned long blue = linijka.Color(0, 0, 30); unsigned long green = linijka.Color(0, 30, 0); unsigned long magenta = linijka.Color(30, 0, 30); zadeklarowania w tablicy pattern: unsigned long pattern[] = {blue, blue, red}; przypisania kolejnym LED elementów wzoru: for (int id = 0; id < ledCount; id=id+patCount) { for (int m = 0; m < patCount; m++) { linijka.setPixelColor(m+id, pattern[m]); } } wyświetlenia: linijka.show(); delay(150); Funkcję ruchu uzyskałem dzięki zmianie wzoru - przesuwając elementy o jeden tzn.: pierwszy staje się drugim, drugi - trzecim, a ostatni - pierwszym: unsigned long tempVal = pattern[patCount-1]; for (int i=patCount-1; i>0; i--) { pattern[i] = pattern[i-1]; } pattern[0]=tempVal; oraz ponownemu przypisaniu elementom LED kolejnych elementów nowego wzoru i wyświetleniu: //wypełnienie linijki kolejnymi elementami wzoru for (int id = 0; id < ledCount; id=id+patCount) { for (int m = 0; m < patCount; m++) { linijka.setPixelColor(m+id, pattern[m]); } } //wyświetlenie linijki linijka.show(); delay(150); Nic nadzwyczajnego, ale uruchamiając program napotkałem kilka istotnych problemów. Najważniejszy, to deklaracja zmiennych i ich zasięg. Aż się prosi by fragment przypisywania elementom LED elementów wzoru i wyświetlenie wstawić do odrębnej funkcji: //wypełnienie linijki kolejnymi elementami wzoru unsigned long pattern[] = {blue, blue, red}; for (int id = 0; id < ledCount; id=id+patCount) { for (int m = 0; m < patCount; m++) { linijka.setPixelColor(m+id, pattern[m]); } } //wyświetlenie linijki linijka.show(); delay(150); Jednak gdy to zrobiłem, okazało się, że kompilator nie zgłaszał błędu, ale zapisany wzór nie był wyświetlany. Podobnie prosi się, by fragment funkcji void loop(): //definiowanie wyświetlanego wzoru unsigned long red = linijka.Color(30, 0, 0); unsigned long blue = linijka.Color(0, 0, 30); unsigned long green = linijka.Color(0, 30, 0); unsigned long magenta = linijka.Color(30, 0, 30); unsigned long pattern[patCount]; // ponowna deklaracja, bez której program nie działa który właściwie mógłby być wykonywany tylko raz, umieścić w void setup(). Próba umieszczenia tego fragmentu do setup także kończyła się błędami kompilacji. Czy mógłby ktoś bardziej biegły w programowaniu powiedzieć, co jest nie tak i skąd błędy w kompilacji i sygnalizowanie błędów zasięgu zmiennych? Co trzeba zrobić by powtarzające się fragmenty zapisać w funkcji?
-
 Cześć, zapewne wielu z was miało problem z obsługą równolegle w czasie kiklu zadań pisząc program dla Arduino. Często mamy zadania typu zbieranie danych z czujników, wyświetlanie ich na wyświetlaczu LCD, sterowania serwo-mechanizmami itp. Jak było to wyjaśnione w drugiej części kursu Arduino można taką pseudo-równoległą obsługę kilku zadań oprogramować za pomocą funkcji millis() - nie jest to niestety prawdziwa wielozadaniowość. Dla trochę mocniejszych MCU (ESP32 i STM32xx) możemy użyć prawdziwego RTOS'a do obsługi wielozadaniowośći. Dla przykładu w obsłudze "Board" dla ESP32 w ArduinoIDE jest osadzony "Free RTOS". Jednakże dla np. płytki "Arduino UNO R3" "Free RTOS" zajmuje za dużo zasobów, aby można go użyć. Jaki więc jest rozwiązanie dla płytek z małymi MCU AVR (np. Atmega328 lub Atmega 324)? Ostatnio natrafiłem na bardzo fajny projekt o nazwie RIOS - jest to scheduler tasków napisany w języku C i zajmujący tak mało zasobów, że może być używany na małych MCU AVR (np. na płytce Arduino UNO). Tutaj linki do strony domowej projektu i portu RIOS dla AVR: https://www.cs.ucr.edu/~vahid/rios/ https://www.cs.ucr.edu/~vahid/rios/rios_avr.htm A tutaj link do filmu o RIOS na Youtube: Postanowiłem wypróbować jak będzie działał RIOS na płytce Arduino UNO R3. Wypróbowałem kod z drugiego podanego linku (wersja schedulera preemptive). Kod został zmodyfikowany tak aby każdy z trzech użytych tasków migał z osobna diodą LED (zielona LED - okres 0.4s, czerwona 1s, żółta 2 s). Tutaj kod zmodyfikowanego kodu dla Arduino UNO (sketch dla Arduino IDE): #include <avr/io.h> #include <avr/interrupt.h> #include <math.h> #define F_CPU 8000000UL #include <util/delay.h> typedef struct task { unsigned char running; // 1 indicates task is running int state; // Current state of state machine unsigned long period; // Rate at which the task should tick unsigned long elapsedTime; // Time since task's previous tick int (*TickFct)(int); // Function to call for task's tick } task; task tasks[3]; const unsigned char tasksNum = 3; const unsigned long tasksPeriodGCD = 25; const unsigned long period1 = 400; //okres 0.4s const unsigned long period2 = 1000;//okres 1s const unsigned long period3 = 3000;//okres 3s int TickFct_1(int state); int TickFct_2(int state); int TickFct_3(int state); unsigned char runningTasks[4] = {255}; // Track running tasks, [0] always idleTask const unsigned long idleTask = 255; // 0 highest priority, 255 lowest unsigned char currentTask = 0; // Index of highest priority task in runningTasks unsigned schedule_time = 0; ISR(TIMER1_COMPA_vect) { unsigned char i; for (i=0; i < tasksNum; ++i) { // Heart of scheduler code if ( (tasks[i].elapsedTime >= tasks[i].period) // Task ready && (runningTasks[currentTask] > i) // Task priority > current task priority && (!tasks[i].running) // Task not already running (no self-preemption) ) { SREG &= 0x7F; tasks[i].elapsedTime = 0; // Reset time since last tick tasks[i].running = 1; // Mark as running currentTask += 1; runningTasks[currentTask] = i; // Add to runningTasks SREG |= 0x80; tasks[i].state = tasks[i].TickFct(tasks[i].state); // Execute tick SREG &= 0x7F; tasks[i].running = 0; // Mark as not running runningTasks[currentTask] = idleTask; // Remove from runningTasks currentTask -= 1; SREG |= 0x80; } tasks[i].elapsedTime += tasksPeriodGCD; } } void init_processor() { /*Set up SPI*/ PORTB = 0xff; /*Set up timer*/ TCCR1B = (1<<WGM12)|(1<<CS11); // CTC mode (clear timer on compare). Prescaler=8 // AVR output compare register OCR0. OCR1A = 25000; // AVR timer interrupt mask register TIMSK1 = (1<<OCIE1A); //enables compare match interrupt TCNT1 = 0; /* Init GPIO pins PB0, PB1, Pb2 */ DDRB |= _BV(DDB0); //Pin 8 DDRB |= _BV(DDB1); //Pin 9 DDRB |= _BV(DDB2); //Pin 10 /*Enable global interrupts*/ SREG |= 0x80; } int main(void) { init_processor(); // Priority assigned to lower position tasks in array unsigned char i = 0; tasks[i].state = -1; tasks[i].period = period1; tasks[i].elapsedTime = tasks[i].period; tasks[i].running = 0; tasks[i].TickFct = &TickFct_1; ++i; tasks[i].state = -1; tasks[i].period = period2; tasks[i].elapsedTime = tasks[i].period; tasks[i].running = 0; tasks[i].TickFct = &TickFct_2; ++i; tasks[i].state = -1; tasks[i].period = period3; tasks[i].elapsedTime = tasks[i].period; tasks[i].running = 0; tasks[i].TickFct = &TickFct_3; while(1) { } } int TickFct_1(int state) { //_delay_us(1000); PORTB ^= _BV(PB0); return 0; } int TickFct_2(int state) { //_delay_us(5000); PORTB ^= _BV(PB1); return 0; } int TickFct_3(int state) { //_delay_us(25000); PORTB ^= _BV(PB2); return 0; } A tutaj zrzut ekranu z komlipacji w Arduino IDE 2.3.2 Jak widać program binarny po kompilacji zajmuje zaledwie 730 bajtów i 44 bajty RAM (2%) co pozostawia prawie całą pamięć dla obsługi naszej aplikacji. Do Arduino UNO do pinów 8, 9, 10 (PB0, PB1, PB2) zostały podłączone trzy diody LED przez rezystory 240 Ohm. Poniżej krótki film wiedo z działania powyższego programu. Niestety filmu nie zamieszczę bo format mp4 nie jest obsługiwany dla forum. Ja zamierzam w programach dla Arduino UNO R3 używać RIOS Pozdrawiam BTW: jak zapewne wielu z was zauważy tak prosty RTOS (sam scheduler tasków) nie zawiera implementacji wielu ważnych mechanizmów jak mutexy, semafory i kolejki. Można je spróbować zaimplementować samemu lecz nie zawsze jerst to trywialne ponieważ niektóre operacje muszą być atomowe.
Cześć, zapewne wielu z was miało problem z obsługą równolegle w czasie kiklu zadań pisząc program dla Arduino. Często mamy zadania typu zbieranie danych z czujników, wyświetlanie ich na wyświetlaczu LCD, sterowania serwo-mechanizmami itp. Jak było to wyjaśnione w drugiej części kursu Arduino można taką pseudo-równoległą obsługę kilku zadań oprogramować za pomocą funkcji millis() - nie jest to niestety prawdziwa wielozadaniowość. Dla trochę mocniejszych MCU (ESP32 i STM32xx) możemy użyć prawdziwego RTOS'a do obsługi wielozadaniowośći. Dla przykładu w obsłudze "Board" dla ESP32 w ArduinoIDE jest osadzony "Free RTOS". Jednakże dla np. płytki "Arduino UNO R3" "Free RTOS" zajmuje za dużo zasobów, aby można go użyć. Jaki więc jest rozwiązanie dla płytek z małymi MCU AVR (np. Atmega328 lub Atmega 324)? Ostatnio natrafiłem na bardzo fajny projekt o nazwie RIOS - jest to scheduler tasków napisany w języku C i zajmujący tak mało zasobów, że może być używany na małych MCU AVR (np. na płytce Arduino UNO). Tutaj linki do strony domowej projektu i portu RIOS dla AVR: https://www.cs.ucr.edu/~vahid/rios/ https://www.cs.ucr.edu/~vahid/rios/rios_avr.htm A tutaj link do filmu o RIOS na Youtube: Postanowiłem wypróbować jak będzie działał RIOS na płytce Arduino UNO R3. Wypróbowałem kod z drugiego podanego linku (wersja schedulera preemptive). Kod został zmodyfikowany tak aby każdy z trzech użytych tasków migał z osobna diodą LED (zielona LED - okres 0.4s, czerwona 1s, żółta 2 s). Tutaj kod zmodyfikowanego kodu dla Arduino UNO (sketch dla Arduino IDE): #include <avr/io.h> #include <avr/interrupt.h> #include <math.h> #define F_CPU 8000000UL #include <util/delay.h> typedef struct task { unsigned char running; // 1 indicates task is running int state; // Current state of state machine unsigned long period; // Rate at which the task should tick unsigned long elapsedTime; // Time since task's previous tick int (*TickFct)(int); // Function to call for task's tick } task; task tasks[3]; const unsigned char tasksNum = 3; const unsigned long tasksPeriodGCD = 25; const unsigned long period1 = 400; //okres 0.4s const unsigned long period2 = 1000;//okres 1s const unsigned long period3 = 3000;//okres 3s int TickFct_1(int state); int TickFct_2(int state); int TickFct_3(int state); unsigned char runningTasks[4] = {255}; // Track running tasks, [0] always idleTask const unsigned long idleTask = 255; // 0 highest priority, 255 lowest unsigned char currentTask = 0; // Index of highest priority task in runningTasks unsigned schedule_time = 0; ISR(TIMER1_COMPA_vect) { unsigned char i; for (i=0; i < tasksNum; ++i) { // Heart of scheduler code if ( (tasks[i].elapsedTime >= tasks[i].period) // Task ready && (runningTasks[currentTask] > i) // Task priority > current task priority && (!tasks[i].running) // Task not already running (no self-preemption) ) { SREG &= 0x7F; tasks[i].elapsedTime = 0; // Reset time since last tick tasks[i].running = 1; // Mark as running currentTask += 1; runningTasks[currentTask] = i; // Add to runningTasks SREG |= 0x80; tasks[i].state = tasks[i].TickFct(tasks[i].state); // Execute tick SREG &= 0x7F; tasks[i].running = 0; // Mark as not running runningTasks[currentTask] = idleTask; // Remove from runningTasks currentTask -= 1; SREG |= 0x80; } tasks[i].elapsedTime += tasksPeriodGCD; } } void init_processor() { /*Set up SPI*/ PORTB = 0xff; /*Set up timer*/ TCCR1B = (1<<WGM12)|(1<<CS11); // CTC mode (clear timer on compare). Prescaler=8 // AVR output compare register OCR0. OCR1A = 25000; // AVR timer interrupt mask register TIMSK1 = (1<<OCIE1A); //enables compare match interrupt TCNT1 = 0; /* Init GPIO pins PB0, PB1, Pb2 */ DDRB |= _BV(DDB0); //Pin 8 DDRB |= _BV(DDB1); //Pin 9 DDRB |= _BV(DDB2); //Pin 10 /*Enable global interrupts*/ SREG |= 0x80; } int main(void) { init_processor(); // Priority assigned to lower position tasks in array unsigned char i = 0; tasks[i].state = -1; tasks[i].period = period1; tasks[i].elapsedTime = tasks[i].period; tasks[i].running = 0; tasks[i].TickFct = &TickFct_1; ++i; tasks[i].state = -1; tasks[i].period = period2; tasks[i].elapsedTime = tasks[i].period; tasks[i].running = 0; tasks[i].TickFct = &TickFct_2; ++i; tasks[i].state = -1; tasks[i].period = period3; tasks[i].elapsedTime = tasks[i].period; tasks[i].running = 0; tasks[i].TickFct = &TickFct_3; while(1) { } } int TickFct_1(int state) { //_delay_us(1000); PORTB ^= _BV(PB0); return 0; } int TickFct_2(int state) { //_delay_us(5000); PORTB ^= _BV(PB1); return 0; } int TickFct_3(int state) { //_delay_us(25000); PORTB ^= _BV(PB2); return 0; } A tutaj zrzut ekranu z komlipacji w Arduino IDE 2.3.2 Jak widać program binarny po kompilacji zajmuje zaledwie 730 bajtów i 44 bajty RAM (2%) co pozostawia prawie całą pamięć dla obsługi naszej aplikacji. Do Arduino UNO do pinów 8, 9, 10 (PB0, PB1, PB2) zostały podłączone trzy diody LED przez rezystory 240 Ohm. Poniżej krótki film wiedo z działania powyższego programu. Niestety filmu nie zamieszczę bo format mp4 nie jest obsługiwany dla forum. Ja zamierzam w programach dla Arduino UNO R3 używać RIOS Pozdrawiam BTW: jak zapewne wielu z was zauważy tak prosty RTOS (sam scheduler tasków) nie zawiera implementacji wielu ważnych mechanizmów jak mutexy, semafory i kolejki. Można je spróbować zaimplementować samemu lecz nie zawsze jerst to trywialne ponieważ niektóre operacje muszą być atomowe.