Przeszukaj forum
Pokazywanie wyników dla tagów 'asm'.
Znaleziono 3 wyniki
-
Dzień Dobry, Chciałbym nauczyć się podstaw assemblera. Mam tutaj na myśli strukturę języka (dyrektywy, sekcje programu itp.) - inaczej mówiąc, zagadnienia niezależne od architektury docelowej. Wiedzę chciałbym najbardziej wykorzystać przy pracowaniu z układami AVR i ARM. Korzystając z zasobów internetu trafiłem na wiele "tutoriali", jednak wszystkie z nich były wg mnie niedopracowane - wiele terminów było omawianych powierzchownie albo wcale, jakby autorzy z góry zakładali, że każdy te terminy zna. Tak więc, jeśli ktoś może zasugerować przystępną, w miarę aktualną lekturę, byłbym wdzięczny za jej link/tytuł.
-
Dzień dobry, Witam wszystkich czytelników. Poniżej prezentuję naszego robota IVS Kaboom 2, w tej chwili prace nad nim zostały zawieszone, robot doczekał się drugiej odsłonny i poruszał się sprawnie na gąsienicach. Kolejnym etapem jest modernizacja elektroniki celem zwiększenia funkcjonalności, zmniejszenie poboru mocy oraz obudowanie robota. Poniżej umieszczam opis zwykle podawany w takich publikacjach. Chętnych zapraszam na stronę robota i nie tylko: www.ivs.pl Dziękuję administratorowi portalu za zaproszenie do publikacji. Pozdrawiam, Bartosz Waleska. Kaboom IVS Autorami projektu IVS Kaboom są Radosław Matwiejczuk i Bartosz Waleska, absolwenci Technikum Elektrycznego w Opolu,a obecnie również absolwenci (od 3 Lipca 2007r) Automatyki i Robotyki, wydziału elektrycznego Politechniki Warszawskiej. Projekt realizowany jest przez autorów całkowicie prywatnie i nie jest związany ani z uczelnią, ani z inną firmą. Autorzy realizują projekt dla własnej satysfakcji wykorzystując swoje fundusze, posiadaną wiedzę i umiejętności. Projekt jest rozwojowy, ciągle pojawiają się nowe udoskonalenia. Krótko o nas Bartosz Waleska, obecnie absolwent Politechniki Warszawskiej. Zainteresowania zawodowe obejmują elektronikę, programowanie i nowoczesne technologie. Jest współautorem oprogramowania dla programatora Combo(www.combosoft.republika.pl). Prywatnie często z aparatem cyfrowym, szukającym ciekawego kadru, lubi wiedzieć co dzieje się w otaczającym świecie, jego zainteresowania obejmują również nowożytną historię świata, kocha podróże i poznawanie nowego. Więcej informacji o autorze znajdziecie Państwo na stronie projektu http://www.ivs.pl Radosław Matwiejczuk, obecnie absolwent Politechniki Warszawskiej. Zainteresowania zawodowe obejmują elektronikę, mechanikę i nowoczesne technologie. Prywatnie ciągle zafascynowany pięknem orientalnej kultury chińskiej i japońskiej. Twierdzi zgodnie, że nie ma rzeczy niemożliwej, lubi sporty ekstremalne Wstęp IVS Kaboom jest projektem robota jeżdżącego, w pierwotnej wersji na kołach, w drugiej, obecnie opracowywanej na gąsienicach. Przedstawimy Państwu w telegraficznym wręcz skrócie, jak wyglądało tworzenie robota, jeżeli jesteście zainteresowani większą ilością zdjęć i materiałów zapraszamy na stronę: http://www.ivs.pl Określenie wymagań Zdając sobie sprawę ze złożoności projektu, cały proces tworzenia robota został poprzedzony solidnymi przygotowaniami. Świadomi byliśmy i jesteśmy, że podczas tworzenia wiele punktów jednak będzie się zmieniać. Nawet elementy, które są zrealizowanepoprawnie będą zmieniane i poprawione, aż do momentu osiągnięcia perfekcji. Aktualny wygląd zapewne jeszcze wiele razy się zmieni, dotyczy to wszystkich elementów konstrukcyjnych- ramy, układu jezdnego, zamocowania poszczególnych płyt elektroniki, czy umieszczenia baterii.Robot zostanie oczywiście obudowany, tak by elektronika i podzespoły były zabezpieczone i niewidoczne. Nastąpi to jednakw ostatniej fazie, w tej chwili ilość zmian konstrukcyjnych wprowadzanych do projektu jest znaczna, a koszt elementów "ozdobnych" znaczny. W pierwszej fazie określiliśmy podstawowe wymagania, które później ulegały modyfikacjom: Robot jezdny, z możliwością skrętu Łatwy sposób aktualizacji oprogramowania Separacja poszczególnych elementów i połączenie ich w sieć (czujniki, sterowniki) Komunikacja bezprzewodowa z otoczeniem Zastosowanie akumulatorów tak by robot mógł się poruszać samodzielnie, bez kabli Szczegółowe określenie rozwiązań podstawowych aspektów Jako materiał do stworzenia ramy robota wybraliśmy aluminium: kątowniki i płaskowniki. Aluminium jest wytrzymałe, da się łatwo obrabiać, dodatkowo jest lekkie. Na elementy wykończeniowe- pomocnicze wybraliśmy plastik, również w formie płaskowników i kątowników. Materiał ten jest dosyć wytrzymały, chociaż nie nadaje się do wykonania elementów 'nośnych', jest tani - to jest jego główna zaleta, poza tym nie przewodzi. Można będzie go więc użyć jako elementy do mocowania płytek elektroniki itp. Rama będzie nitowana, w specyficznych miejscach gdzie będzie to wymagane skręcana śrubą. Jako układ napędowy - dwa silniki elektryczne, prądu stałego. Jeden silnik na jedno koło napędowe. Ilość kół napędowych - dwa, dodatkowo jedno lub dwa koła bezwładnościowe. Ilość kół bezwładnościowych ma zostać określona po wykonaniu prób dynamicznych na stworzonym modelu. Układy elektroniczne będą bazować na procesorach Atmel 89C51, 89C52, 89S51 oraz 89C2051 w zależności od wymagań. W przypadku układów wymagających większej wydajności zastosujemy procesory Atmel AVR ATmega 162. Komunikacja między układami woparciu o interfejs RS-485. Jako układ jednostki centralnej - decyzyjnej postanowiliśmy zastosować laptop Aristo FT-8500. Komputer wyróżnia się małymi wymiarami (12,1"), oraz własnym układem zasilania. Pozwala to również na zastosowanie w miarę taniego i szerokopasmowego łącza WLAN co umożliwi zintegrowanie z lokalną strukturą sieciową i wieloma komputerami. Montowanie kół do ramy. Kolejną fazą jest zamontowanie kół do przygotowanej wcześniej ramy. Koła podobnie jak większość pozostałych elementów zostały zakupione w Castoramie.Korpus silnika wraz z kołem w tej chwili zostanie przymocowany za pomocą plastikowych pasków montażowych, ze względów bezpieczeństwa, w przypadku przeciążenia pasek zostanie zerwany.Nie dojdzie do uszkodzenia elementów konstrukcyjnych. Później po zbudowaniu i zamontowaniu obudowy, paski zostaną zastąpione metalowymi obejmami. Role zabezpieczenia przed uszkodzeniem będą pełnić zderzaki. Robot będzie wyposażony również w czujniki dojazdowe, tak więc ewentualne uszkodzenia wynikłe z zderzenia się z innymi przedmiotami zostaną wyeliminowane. Testy zbieżności, oraz testy dynamiczne modelu. Po zamontowaniu kół, model zostanie przetestowany. Będziemy sprawdzać również jego możliwościładowności. Jako obciążenie zastosujemy butle wody źródlanej o pojemności 5l. Sprawdzimy zachowaniesię robota przy skrętach, jakość wykonania ramy. Sprawdzimy wrażliwość na przeciążenia. Integrowanie z elektroniką Po wykonaniu ramy robota, zamocowaniu silników oraz wstępnych testach przyszedł czas na integrowanie robota z elektroniką. Układy zostały wykonane w oparciu o nasze płytki startowe, wraz z procesorami rodziny '51 i AVR. Programowanie układów '51 zostało zrealizowane w oparciu o programator Combo. Współautorem oprogramowania jest Bartosz Waleska, twórca Kaboom. Początkowo pierwszym aspektem było sterowanie silnikami, regulacja prędkości obrotowej poprzez elektronikę. W fazie następnej będzie to powiązanie wszystkich układów wraz z komputerem poprzez RS-485. Złożoność systemu Na system sterowania i kontroli składa się wiele płytek. Komunikacja między nimi zrealizowana jest w oparciu o magistrale RS-485. Komunikacja z komputerem możliwa jest dzięki zaprojektowaniu i wykonaniu konwertera RS-232/RS-485. Układy są wyposażone w różne procesory z różnych rodzin. Oprogramowanie wykonane jest w oparciu o język C. Oprócz układu sterowania kołami zbudowanego w oparciu o ATmega 162 na system składa się układ analizy kart chipowych (element bezpieczeństwa), układ kontroli prędkości kół oraz układ sterowania elementami wykonawczymi - światłami. Światła - prawdopodobnie dwie żarówki halogenowe w oprawkach zostaną zamontowane na obudowie. Myśleliśmy nad diodami, które na pewno byłyby ciekawsze, niestety ich obecna cena ok. 50zł za sztukę w tej chwili nie pozwala na ich zastosowanie z powodu ograniczonych funduszy. Nowa odsłona. Kaboom 2. Zbudowanie modelu Kaboom, który mogliście Państwo zobaczyć na wcześniejszych stronach dobiegło końca.Pamiątką są zdjęcia i filmy, częściowo udostępnione, a częściowo pozostające w naszym archiwum.Jak zwykle przy takich projektach wyciągnęliśmy wnioski z istniejącej konstrukcji i oczywiście stwierdziliśmy- chcemy więcej! Warto jednak w tym miejscu dokonać choćby małego podsumowania. Podsumowanie Kaboom 1 Konstrukcja Kaboom 1 (od tej pory tak będziemy nazywać nasz pierwszy model) zaskoczyła nas niesamowicie. Nie spodziewaliśmy się, że już za pierwszym razem uda się stworzyć tak udany model. Obawialiśmy się o dokładność wykonania poszczególnych elementów, o problemy z połączeniem tak wielu układów, z prędkością transmisji i dużą zajętością magistrali a co za tym idzie wielu błędów i kolizji danych. Okazało się jednak, że model został wykonany wręcz perfekcyjnie, zachowywał bardzo dobre własności jezdne. Połączenie magistralą RS-485 pozwoliło na łatwe i bezpieczne wymienianie danych, a zastosowana prędkość tansmisji 57600 bps na swobodną wymianę informacji. Stworzone oprogramowanie pozwoliło na poprawną kontrole pracy robota. Oczywiście nie wszystko było tak perfekcyjnie, skoro zdecydowaliśmy się na tworzenie Kaboom 2. Faktycznie tak jest, na pewno prędkość robota jest zbyt duża. To czego obawialiśmy się wcześniej, choć ze względów konstrukcyjnych (trudności z tym związanych) nie chcieliśmy się tym zajmować. Bardziej zasadne było dla nas zobaczenie jak będą działać poszczególne systemy i na co postawić nacisk.Tak więc zastosowanie przekładni jest jedną z tych rzeczy koniecznych. Okazało się również, że jest trochę mało miejsca na układy elektroniki, pod laptopem po prostu jest ciasno. Doszliśmy również do wniosku, że wyciągane akumulatory to jednak zły pomysł. Trzeba postarać się zabudować je bardziej w środku, bez konieczności wyciągania ich do ładowania. Ponieważ jednak silniki pobierają duży prąd (tego się spodziewaliśmy już od samego początku - zaskoczenia nie było) w przyszłym projekcie postaramy się przeznaczyć dodatkowe środki na zasilanie silników. Robot musi być wyposażony w czujniki dojazdowe, a sama elektronika i systemy decyzyjne tak zaprojektowane, że wejście jakiegokolwiek obiektu przed robota musi powodować natychmiastowe decyzje związane z bezpieczeństwem (zwolnienie, zatrzymanie robota). Pojawił się również problem z zasilaniem elektroniki. Okazuje się, że mimo iż pobór prądu przez poszczególne układy nie jest zbyt duży, to łącznie wcale nie jest to tak mało. Każdy z układów elektroniki do tej pory był wyposażony w stabilizator 7805 (5V, 1.5A). Rozwiązanie to jest dobre, w przypadku jakieś awarii w dużej mierze pozwoli ochronić układy elektroniki. Należy jednak zastosować układ zasilania pośredniego, zmniejszający napięcie zasilające elektronikę z 18V do mniejszego (np. 9-10V). Kaboom 1 w punktach *Dobra konstrukcja mechaniczna *Sprawna komunikacja komputera ze sterownikami w oparciu o RS-485 *Poprawnie wykonana elektronika +Konieczność zastosowania przekładni w celu zmniejszenia prędkości +Rozbudowanie robota, tak by swobodnie można zamontować więcej płytek elektroniki +Dodanie akumulatorów do zasilania silników by zwiększyć czas ich pracy +Dodanie czujników dojazdowych pozwalających na bezpieczne poruszanie się +Zastosowanie kaskady stabilizatorów w celu zmniejszenia strat Kaboom 2 - założenia wstępne Zbudowanie robota w oparciu o zalecenia powstałe w wyniku stworzenia Kaboom 1 Zamiast kół zastosować gąsienice pozwalające na pokonywanie przeszkód Dodać kamerę do przeprowadzania analizy wizualnej, platforma kamery obrotowa w dwóch osiach Dodać kontrolę napięcia Jako panel sterowniczy wykorzystać urządzenie działające pod kontrolą systemu Windows Mobile, wymaga się, by obraz z kamery był przekazywany na ekran urządzenia mobilnego. Poniżej w telegraficznym zdjęciowym skrócie: Szkoda, że poucinało komentarze..





















-
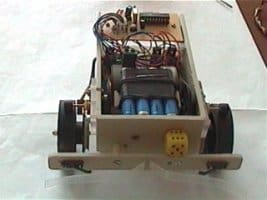
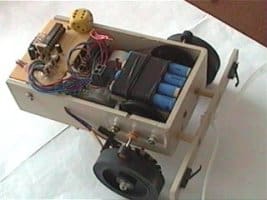
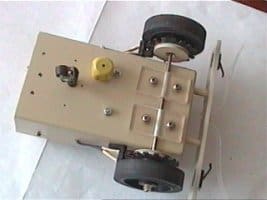
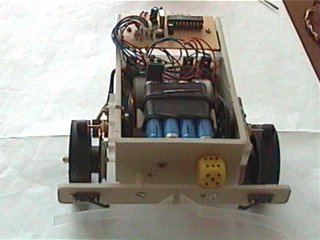
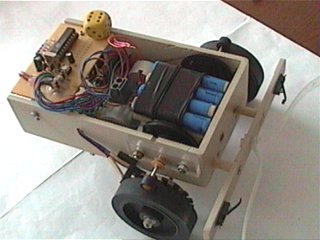
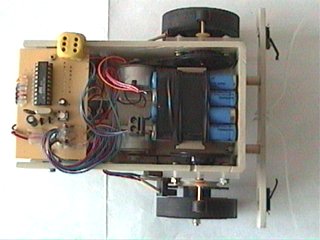
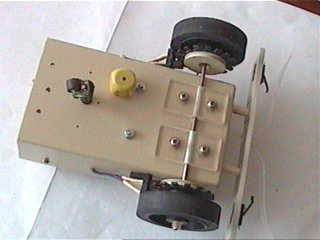
Witam Jakiś czas temu, wykonałem robocika, tzw. żółwia (Logo), służył mi on jako model do zabawy w programowanie mikrokontrolerów . Pomysł zaczerpnąłem z artykułu zamieszczonego w EdW ( http://www.edw.com.pl/pdf/k13/38_05.pdf ). Do budowy wykorzystałem tylko to co "było pod ręką", niczego specjalnie nie kupowałem z wyjątkiem miniaturowych łożysk kulkowych (1zł szt.) by koła się 'gładko' obracały. A oto kilka zdjęć, (przepraszam za słabą jakość, użyłem kamery internetowej).