Przeszukaj forum
Pokazywanie wyników dla tagów 'programowanie'.
Znaleziono 50 wyników
-
Oferuję kompleksowe usługi w zakresie budowy maszyn: Wizualizacje Komputerowe Projektowanie 3D Druk 3D Konstrukcja Maszyn Elektronika, PCB Programowanie na Wszystkie Platformy Aplikacje mobilne, internetowe, desktopowe Zapraszam do odwiedzenia stron oraz kontaktu poprzez maila: [email protected] https://www.shargon.com/ https://www.facebook.com/SHARGONtech
-
- 1
-

-
- budowa maszyn
- innowacje
- (i 3 więcej)
-

STM32H735-DK Grzebanie po rejestrach - zajęcia praktyczne
virtualny opublikował temat w Mikrokontrolery
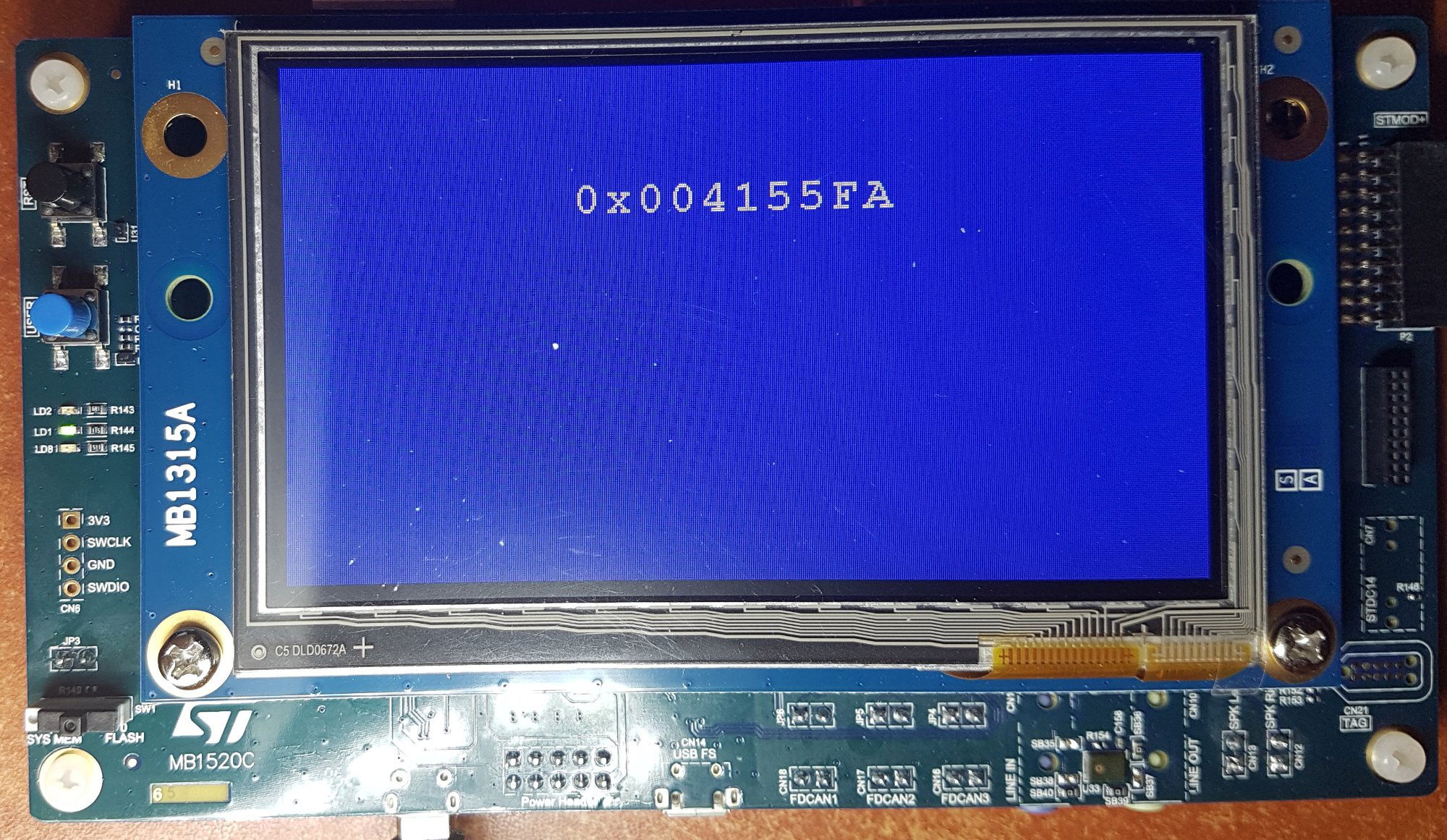
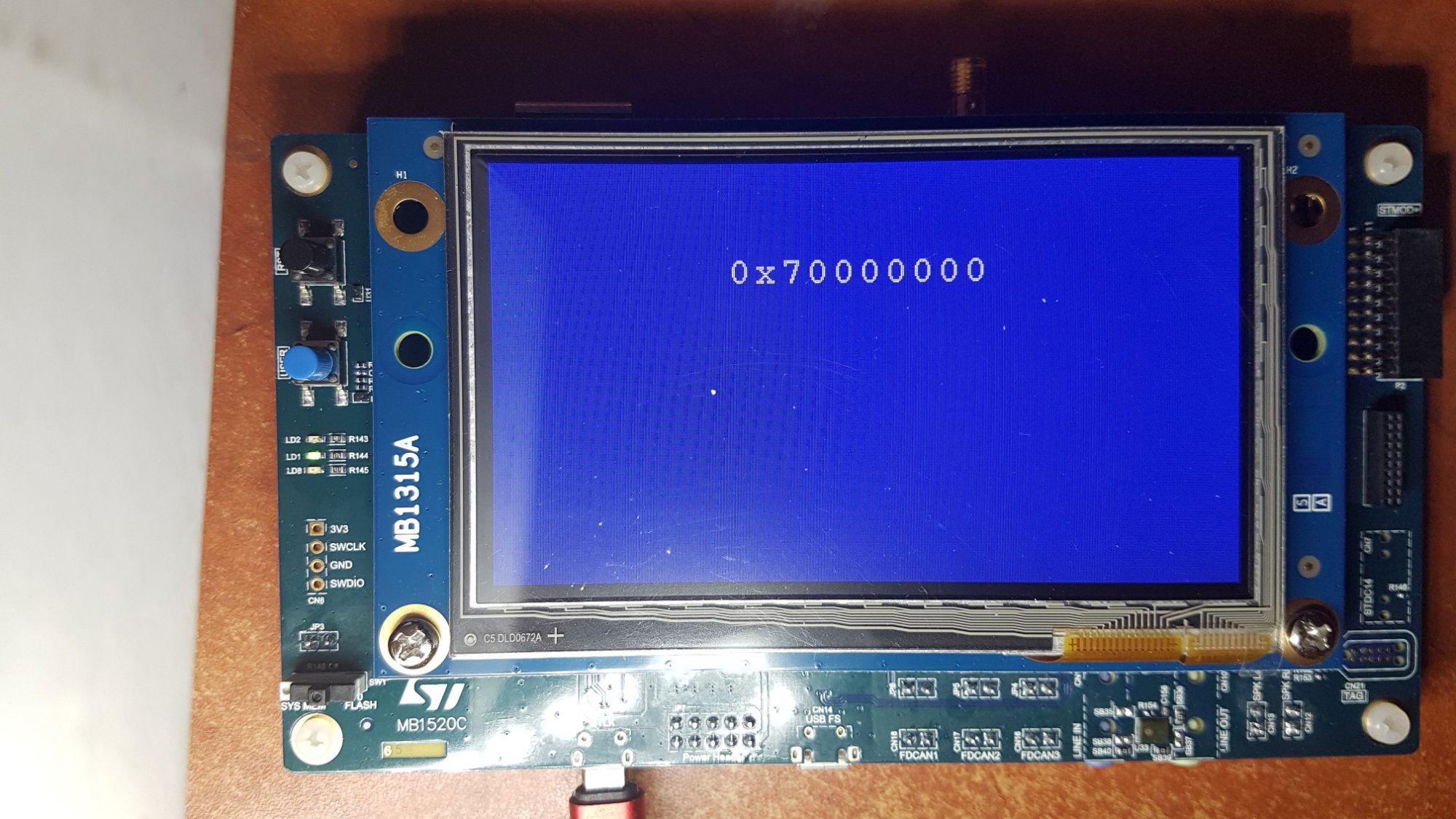
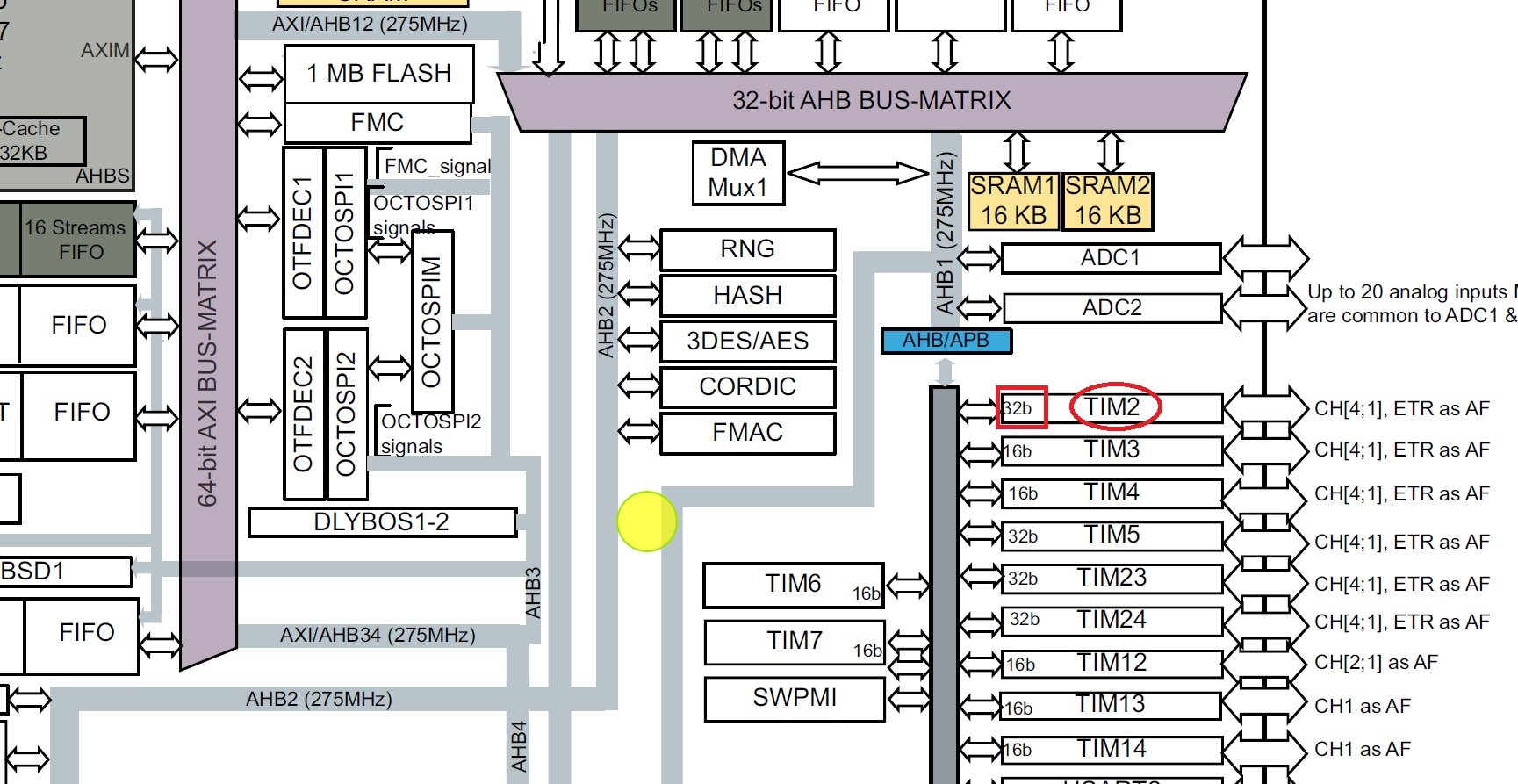
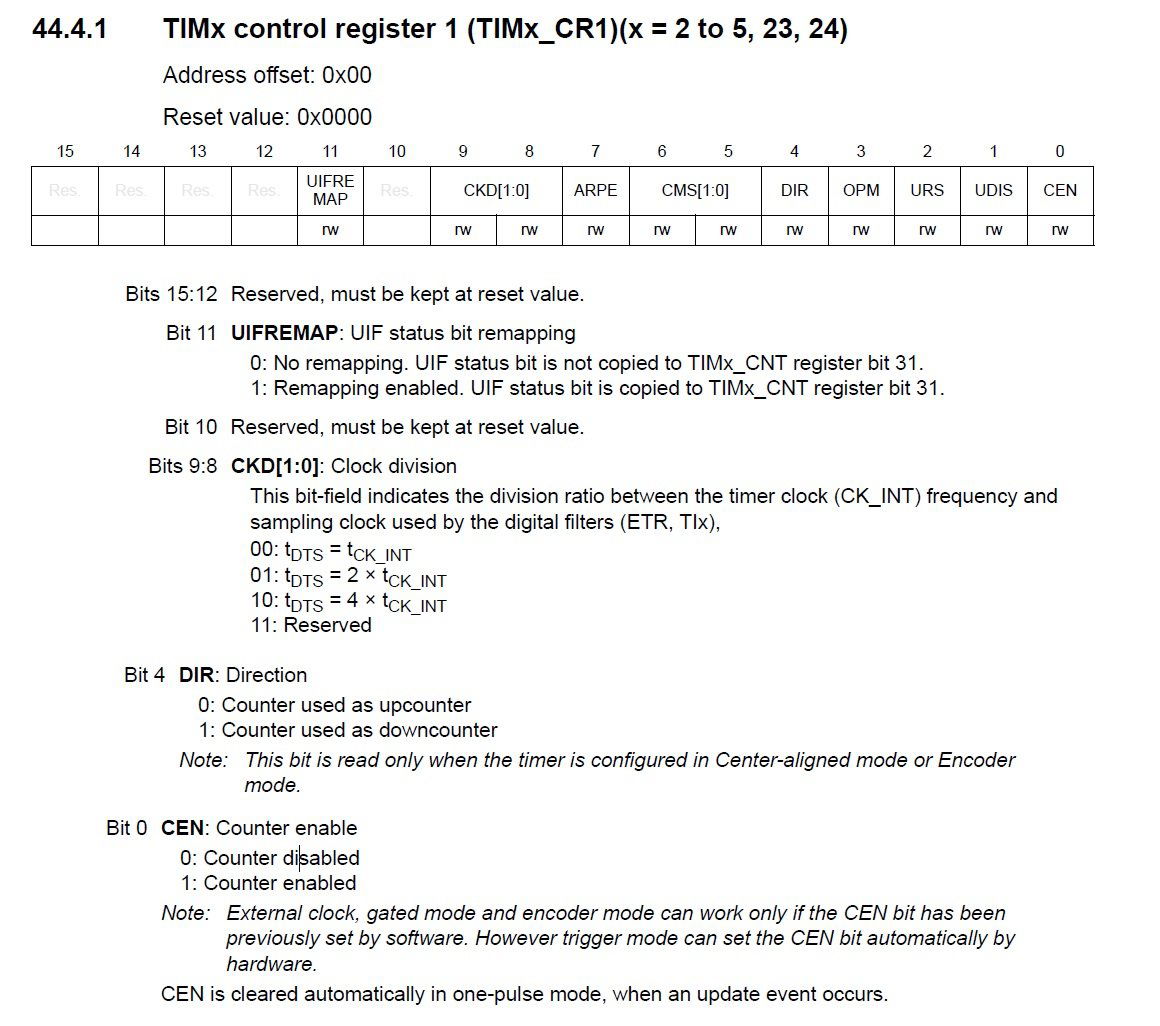
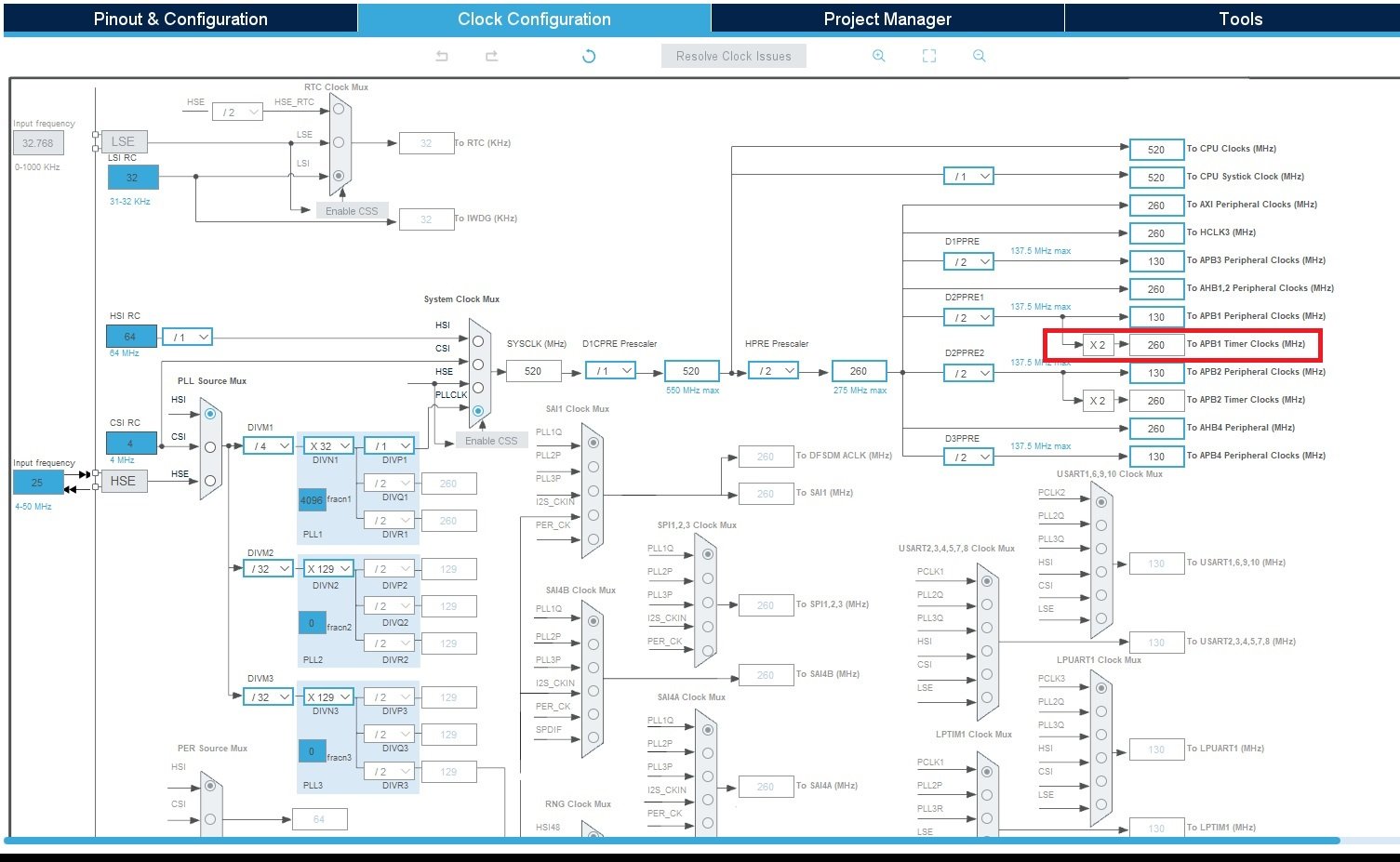
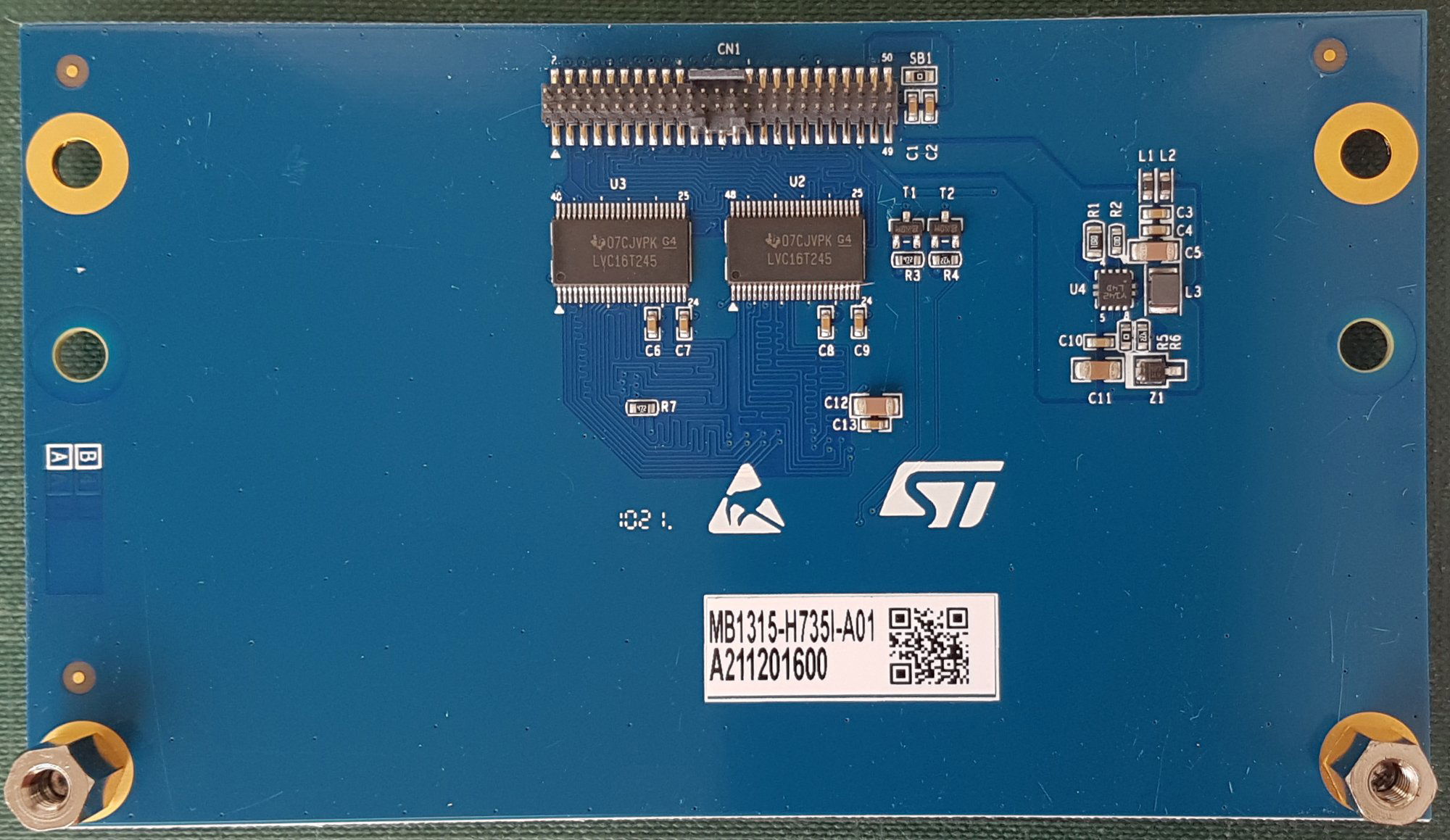
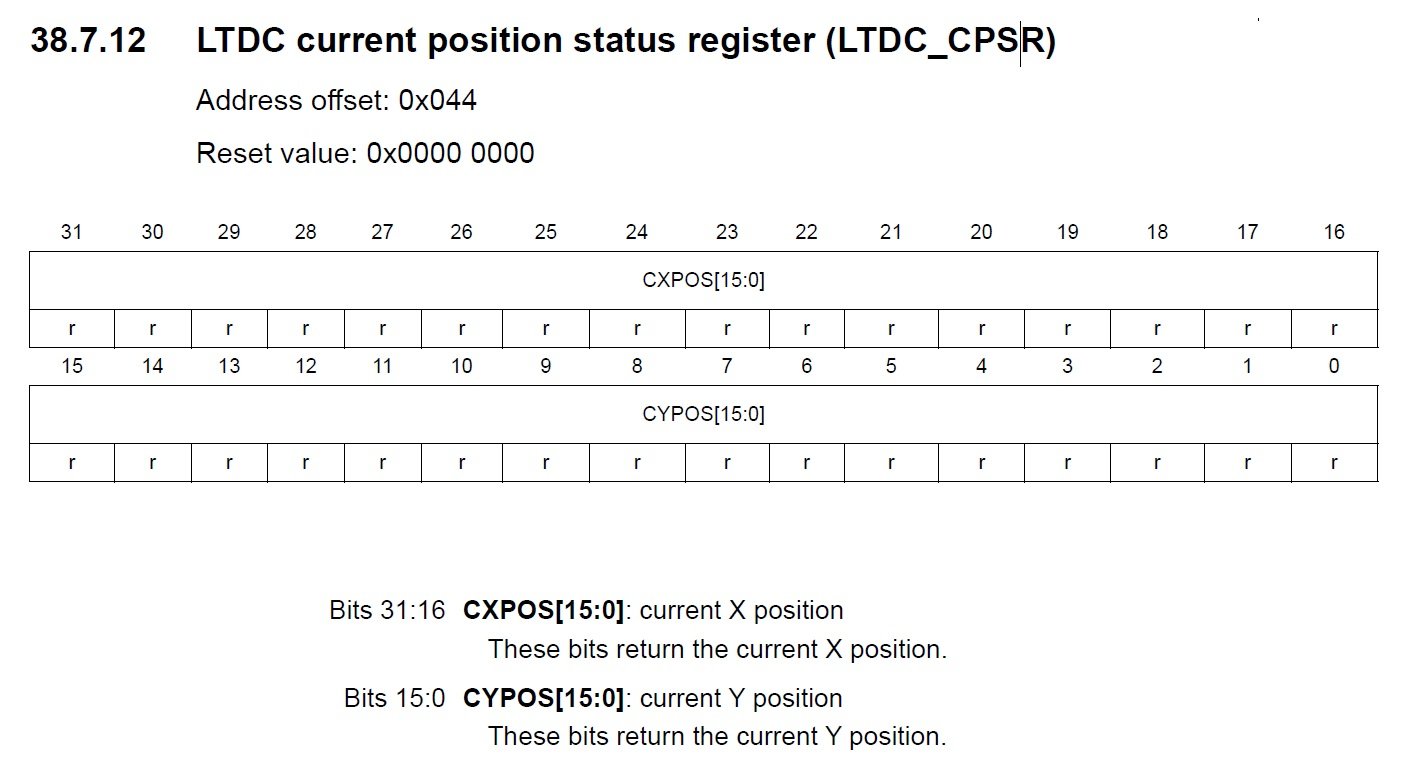
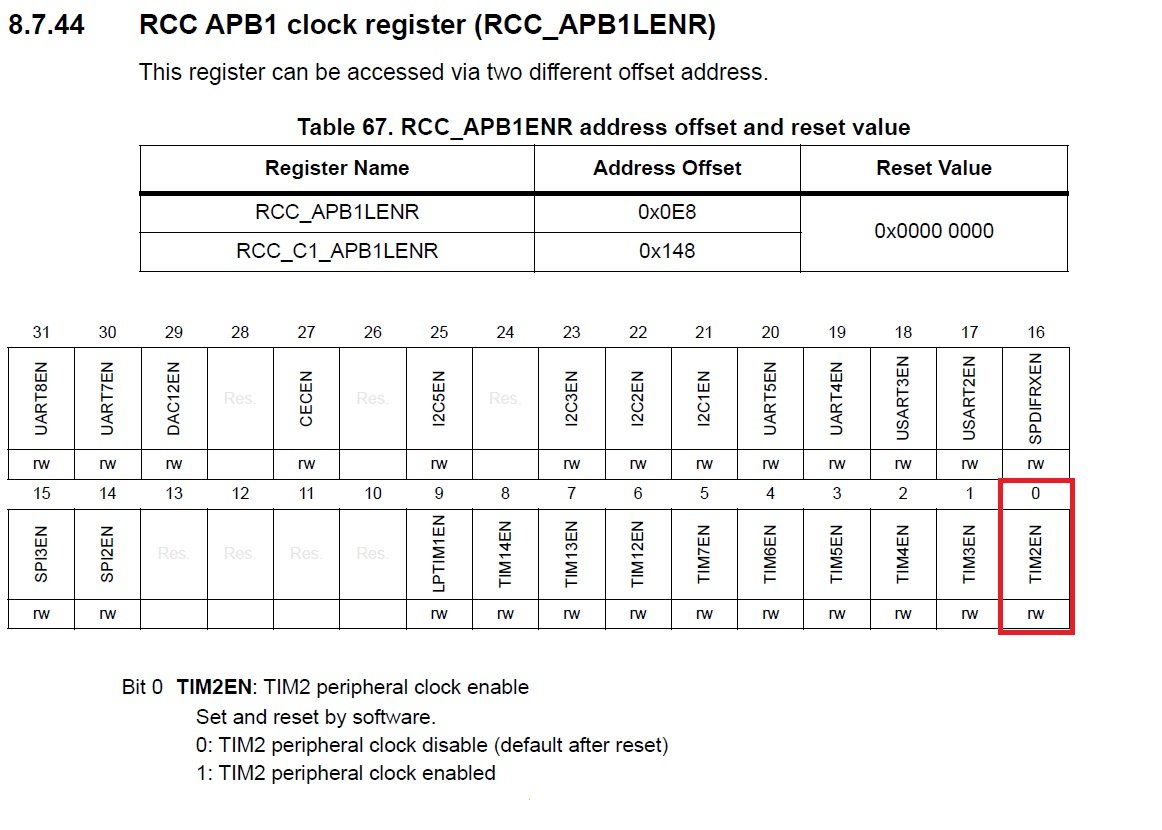
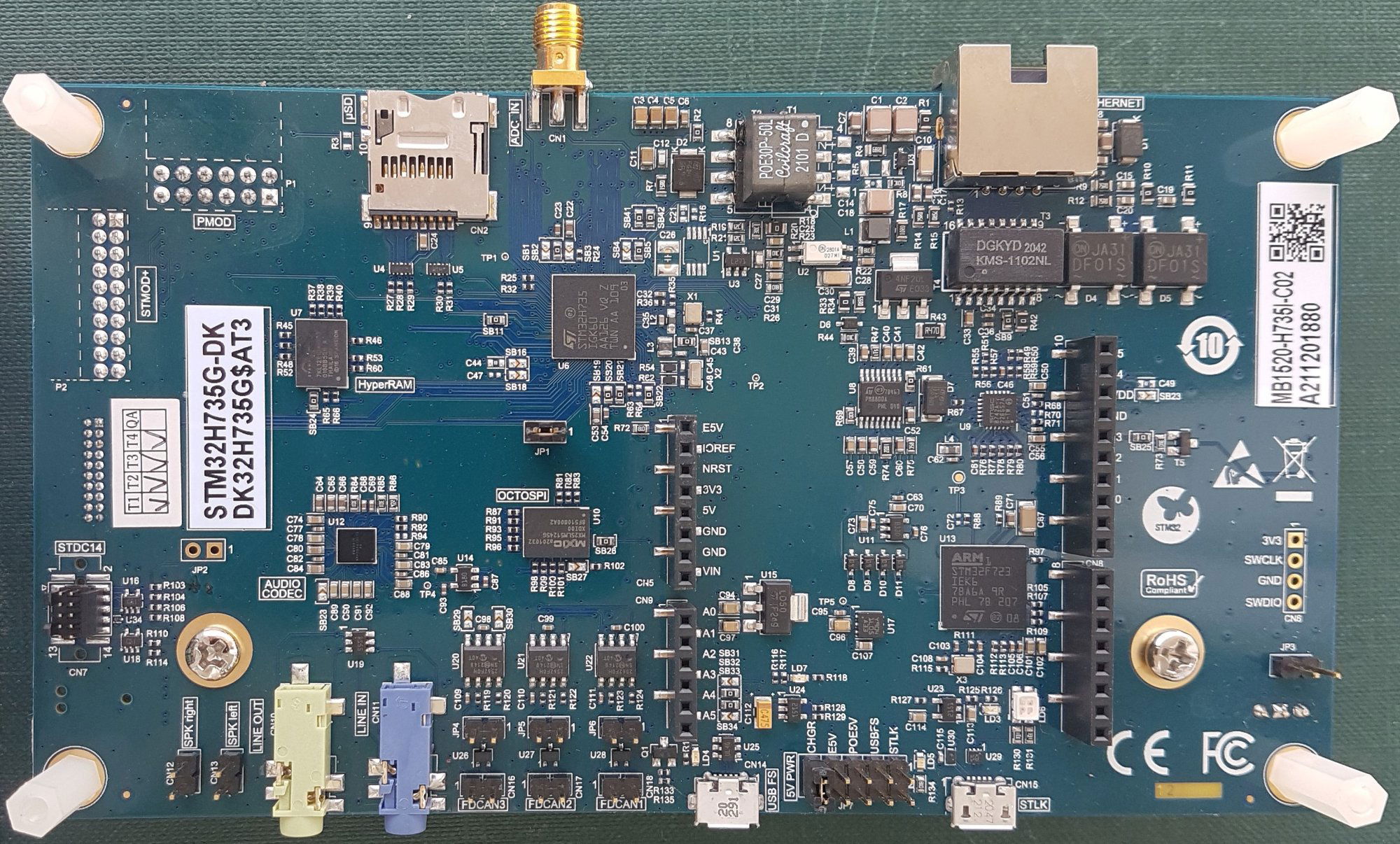
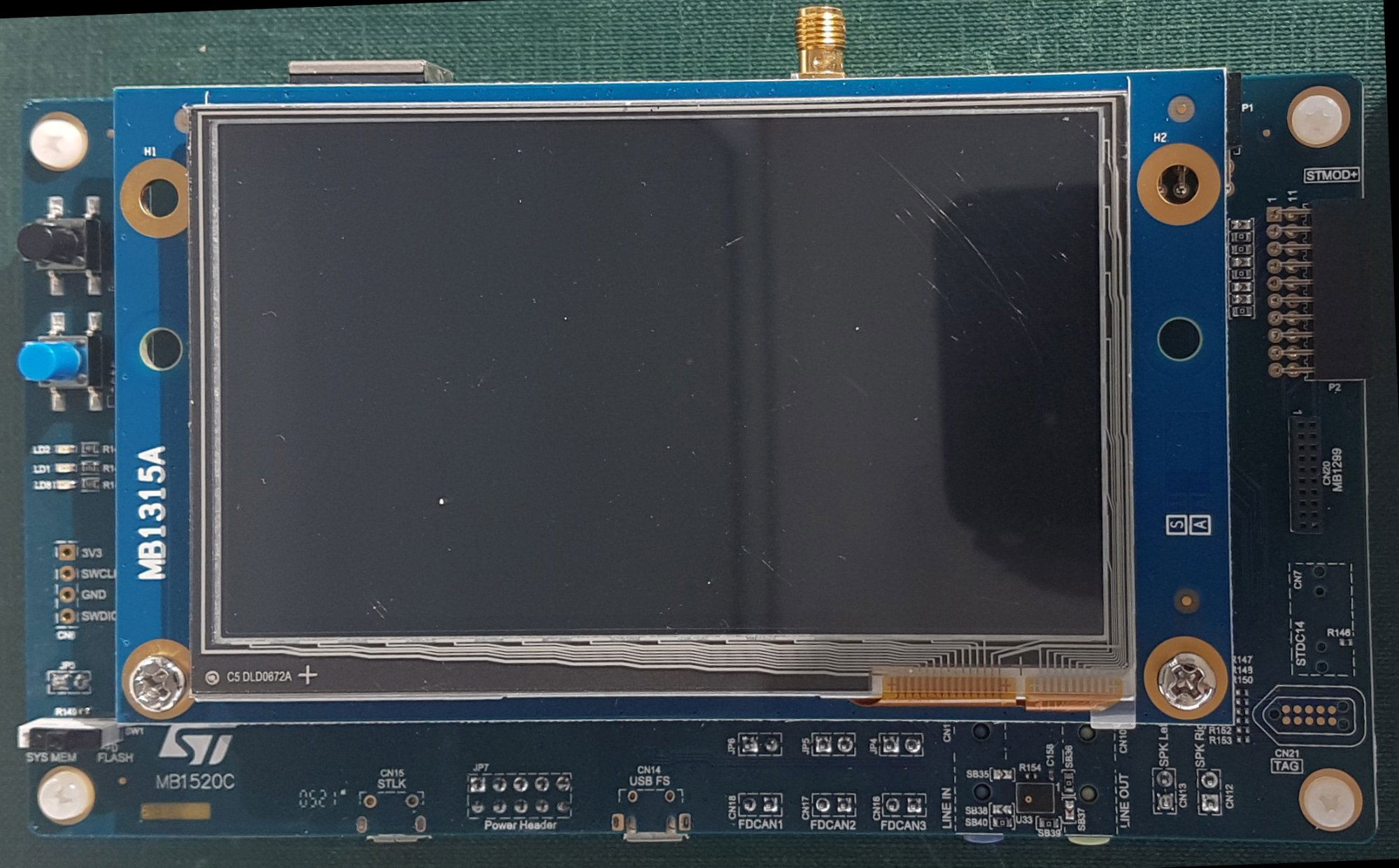
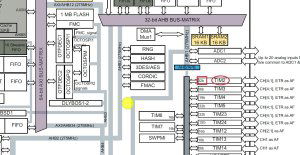
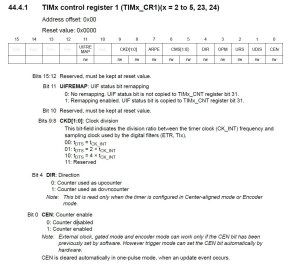
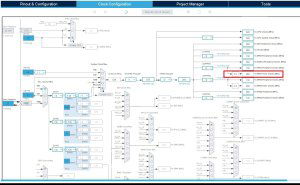
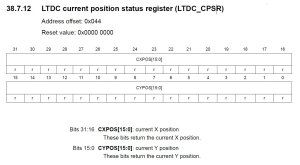
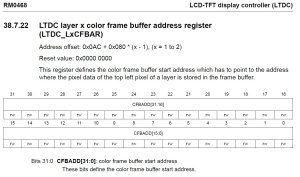
Dzisiaj na warsztacie nie byle jaki zestaw tuningowany na oscyloskop: STM32H735-DK Skrócone dane techniczne: Arm® Cortex®-M7 32-bit 550 MHz MCU, 1 MB flash, 564 KB RAM STM32H735IGK6 microcontroller featuring 1 Mbyte of flash memory and 564 Kbytes of SRAM in UFBGA176+25 package 4.3" TFT 480 × 272 pixels colored LCD module with capacitive touch panel and RGB interface 4.3 inch TFT 480x272 FPS(???) - sprawdzimy 128-Mbit HyperRAMTM po interfejsie OCTOSPI // framebuffer 512-Mbit Octo-SPI Flash Do badań wziąłem firmowy example "BSP", który jest wygodny z uwagi, że ma już dołączone czcionki. Wiemy już do jakiej prędkości można rozbujać procka, w pliku main komentarze podają że jest ustawiony na 520MHz, a magistrale APB1,2,3,4 biegają na 130MHz. Teraz chciałbym to sprawdzić, zmierzyć aby dokonać dalszych pomiarów... W jaki sposób? Uruchomić nieużywany przez program timer najlepiej 32bitowy i zmierzyć przynajmniej z grubsza ile cykli timer zliczy po sekundzie. Z dejtaszita od proca można się dowiedzieć że jest w nim aż 24 przeróżne timery z czego 4 są 32bitowe. Przypuszczam atak na Timer2. Żeby go okiełznać należy zerknąć do schematu blokowego w dejtaszicie procka i ustalić do jakiej szyny (magistrali) podwieszony jest TIM2: Ze schematu wynika że: 1. TIM2 jest "podwieszony" na APB1 2. TIM2 jest 32 bitowy Kolejny ważny niuans, to że TIM2 jest na APB1 nie oznacza że jest taktowany 130 MHZ, ponieważ z obrazka Clock Configuration dowiedziałem się, że akurat TIMERY są taktowane 2 razy szybciej niż magistrala: W każdym razie warto to wiedzieć, chociaż zaraz zbadamy to empirycznie. OK, teraz uruchomienie Timera2 wygląda w kolejności, że najpierw trzeba go włączyć w rejestrze bloku kontrolnego (tym razem używamy reference manuala - RM): Z obrazka widać że najmłodszy bit uruchamia taktowanie TIM2, a więc prosta instrukcja: RCC->APB1LENR |= 1; I TIM2 zostaje włączony Kolejna rzecz to ustawienie prescalera dla TIM2 oraz rejestru przeładowania wartości na 0xFFFFFFFF. Tak się składa, że rejestry te są po resecie ustawione na pożądane właśnie wartości, ale dla porządku należy zrobić tak: TIM2->PSC = 0; TIM2->ARR = 0xffffffff; Teraz dochodzi ustawienie TIM2 na wyłączenie (póki co) i jego wartość początkowa - rejestr CR1 i CNT TIM2->CR1 = 0; TIM2->CNT = 0; Teraz należ koniecznie przyjrzeć się rejestrowi CR1, bo w nim jest sporo kluczowych ustawień, które musimy znać i uwzględnić podczas uruchamiania timera: Wartość początkowa 0 jest pożądaną przez nas wartością do zatrzymania timera, a do jego włączenia dla naszych celów konieczna jest wartość 1 To ustawia między innym wartość podziału taktowania TIM2 na 1, czyli timer będzie zliczał impulsy taktowania bez podziału. Co przypominam w domniemaniu dla tej konkretnej konfiguracji powinno dać wartość 260 000 000 "tyknięć" na sekundę. Także np. bit DIR = 0 ustawia licznik jako "zliczający w górę". Ostatnią rzeczą jaką potrzebujemy, to odmierzenie 1 sekundy (przynajmniej z grubsza) i sprawdzenie ile cykli zliczył w tym czasie TIM2. Do określenia 1 sekundy posłuży funkcja HAL_Delay(1000); Czyli: 1. Uruchamiamy timer i Hal_Delay(1000) 2. Po powrocie z funkcji HAL_Delay(1000) zatrzymujemy TIM2 i sprawdzamy w rejestrze CNT ile cykli zliczył w czasie działania funkcji HAL_Delay(1000) - przypominam, że oczekujemy wartości jakichś 260 milionów Oto część programu wykonująca to dzieło: uint32_t dana = 0; // TIM2->CNT value char desc[64]; // null terminated string RCC->APB1LENR |= 1; // enable TIM2 clk __asm("dsb sy"); // data synchrinization barrier TIM2->PSC = 0; // prescaler = 0 TIM2->ARR = 0xffffffff; // reload value TIM2->CR1 = 0; // stop TIM2 TIM2->CNT = 0; // reset TIM2 CNT value to 0 TIM2->CR1 = 1; // RUN TIMER2 HAL_Delay(1000); // wait 1 sec. TIM2->CR1 = 0; // stop TIMER2 dana = TIM2->CNT; // read CNT value UTIL_LCD_Clear(UTIL_LCD_COLOR_BLUE); // clear screen sprintf(desc, "0x%08X", (unsigned int) dana); // prepare string UTIL_LCD_DisplayStringAt(0, 60, (uint8_t *) desc, CENTER_MODE); // display string at screen I oto wynik działania tej części programu: wartość 0x0F8322E0, to dziesiętnie 260 252 384 !!! Wynik jest ciut większy od 260M, ale odchyłka jest mniejsza od 1 tysięcznej, ponieważ funkcję Hal(Delay(1000) wywołujemy "pomiędzy tykami SysTicka", który działa 1000 razy na sekundę. W każdym razie udało się ustalić, że Timer2 jest taktowany 260Mhz. Super sprawa! Jest timer z którego pomocą można odmierzać czas i do tego z wielką rozdzielczością!!! Więc teraz za pomocą tego timera chciałbym zmierzyć ile cykli timera trwa 1 ramka ekranu... Do tego jest nam potrzebny jakiś rejestr, który potrafi nas poinformować, w jakim miejscy jest tworzenie (odświeżanie) obrazu (plamka rastra). Tak się szczęśliwie składa, że jest taki rejestr i nazywa się LTDC->CPSR: Rejestr jest niezwykle dokładny, ponieważ podaje pozycję X i Y aktualnie tworzonego obrazu, do naszych celów wystarczy jego najmłodszych 16 bitów, co poda w której aktualnie linii jest plamka, a właściwe sprawdzenie pozwoli stwierdzić moment rozpoczęcia danej linii. Co należy zrobić? 1. Przygotować TIM2 2. Poczekać na wybraną linię ekranu i uruchomić TIM2 3. Poczekać aż skończy się wyświetlanie danej linii 4. Poczekać ponownie na wybraną linię i zatrzymać TIM2 5. Odczytać i wyświetlić wartość zliczoną przez Timer2 To zadanie wykonuje poniższy program: RCC->APB1LENR |= 1; __asm("dsb sy"); TIM2->PSC = 0; TIM2->ARR = 0xffffffff; __disable_irq(); while((LTDC->CPSR & 0xffff) != 50){} // wait until after line 10 TIM2->CR1 = 0; // prepare timer to start TIM2->CNT = 0; while((LTDC->CPSR & 0xffff) != 10){} // wait fir line 10 TIM2->CR1 = 1; // run timer2 count while((LTDC->CPSR & 0xffff) == 10){} // wait for end of line 10 while((LTDC->CPSR & 0xffff) != 10){} // wait one more time for line 10 TIM2->CR1 = 0; // stop TIM2 dana = TIM2->CNT; // read CNT value __enable_irq(); UTIL_LCD_Clear(UTIL_LCD_COLOR_BLUE); sprintf(desc, "0x%08X", (unsigned int) dana); UTIL_LCD_DisplayStringAt(0, 60, (uint8_t *) desc, CENTER_MODE); // print CNT value on the screen I oto wynik działania programu: 0x004155FA to dziesiętnie 4 281 850 I co niby z tego miałoby wynikać??? Otóż jeżeli wielkość 260 000 000 podzielimy przez 4 281 850, to będziemy wiedzieć ile razy liczba 4 281 850 mieści się w 260 000 000 LOL Może i śmiesznie, ale jeżeli przypomnimy sobie że owe 260 000 000 to jest sekunda, a 4 281 850 to czas tworzenia się 1 ramki obrazu, wówczas otrzymany wynik to będzie REFRESH RATE !!! Czyli częstotliwość odświeżania obrazu, Ponieważ nigdzie w dokumentacji STM32H735-DK nie znalazłem tej informacji (być może źle szukałem), to uzyskałem ją empirycznie. Nasz REFRESH RATE wynosi około 60,7 [Hz] Jest to bardzo ważna informacja chociażby gdy uwzględnimy prędkość transferu danych z frame bufora do LCD, co przy 30 [Hz] dla trybu ARGB8888 dało by: 30*480*272*4 = 15 667 200 Bajtów na sekundę, natomiast przy 60 [HZ] wielkość ta będzie dwukrotnie wyższa i będzie wynosić ponad 31 [MB/s], a nawet ciut więcej, jeżeli pamiętamy, że REFRESH RATE wyniósł 60,7 [Hz] a nie 60 [Hz]. Być może również źle szukałem, ale również nie znalazłem gdzie mapowany jest nasz OCTO-SPI HyperRAM. Z podglądu w STM32Cubeporgrammer widać że external falsh jest mapowany pod 0x90000000 i jest go 64MB Z UM2679 strona 7 (UM do STM32H735-SK) //Figure 3. Hardware block diagram// widać że HyperRAMTM jest na interfejsie OCTOSPI2 w wielkości 128Mbit, czyli 16 [MB] - tak wiem, że 128 brzmi lepiej od 16, ale wolałbym żeby działy marketingu podawały wielkości w MEGABAJTACH a nie w megabitach. Z kolei nie znalazłem informacji GDZIE mapowany jest HyperRAMTM Jak wspomniałem, może źle szukałem, ale zamiast dalej szukać postanowiłem znów sprawdzić to empirycznie. Istnieje rejestr LTDC_LxCFBAR, który oprócz tego że przechowuje adres framebufora, także pozwala się odczytać: Nic prostszego jak program: dana = LTDC_Layer1->CFBAR; UTIL_LCD_Clear(UTIL_LCD_COLOR_BLUE); sprintf(desc, "0x%08X", (unsigned int) dana); UTIL_LCD_DisplayStringAt(0, 60, (uint8_t *) desc, CENTER_MODE); Powiedział gdzie mapowana jest pierwsza ramka framebufora: Może nie z całą pewnością, ale z dużym prawdopodobieństwem można domniemywać, że HyperRamTM jest mapowany od 0x70000000 !!! Po zadaniu sobie tylu trudów, aby zbadać powyższe parametry tego DEVBOARDA już nic nie mogło mnie powstrzymać od uruchomienia na nim vectordotów 60FPS Program został osadzony w internal flashu (0x08000000), razem z fontami i narzutem przykładu BSP nie przekroczył 50 [KB] Link do github z HEX'em Github W załączeniu Hex z vectordotami: STM32H735-DK FANTASTIC VECTORDOTS.zip








-
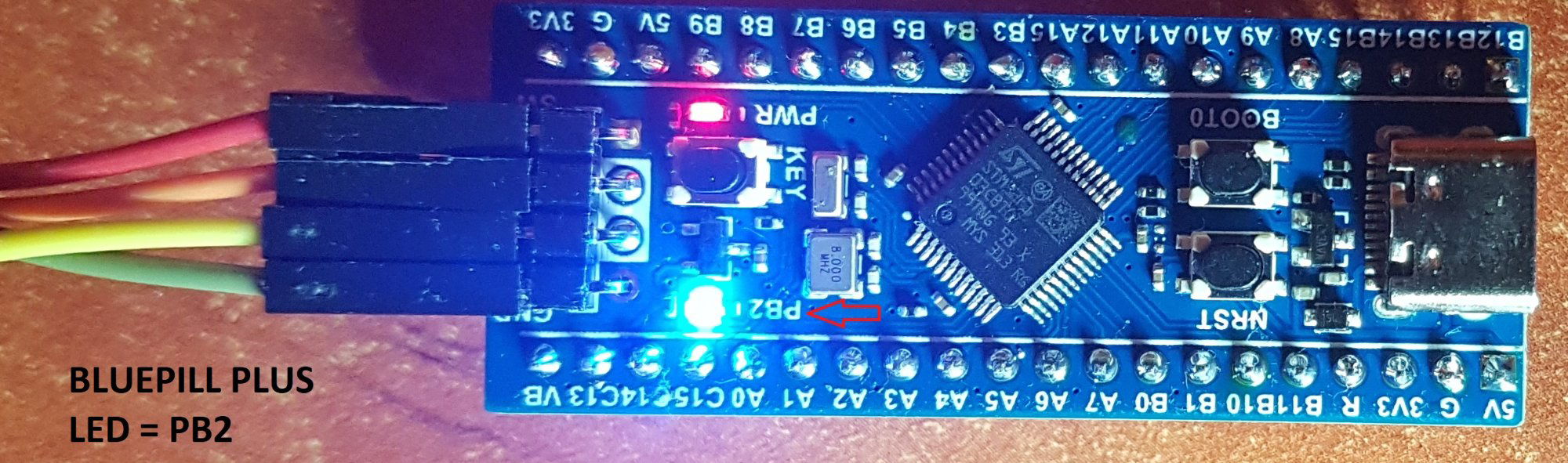
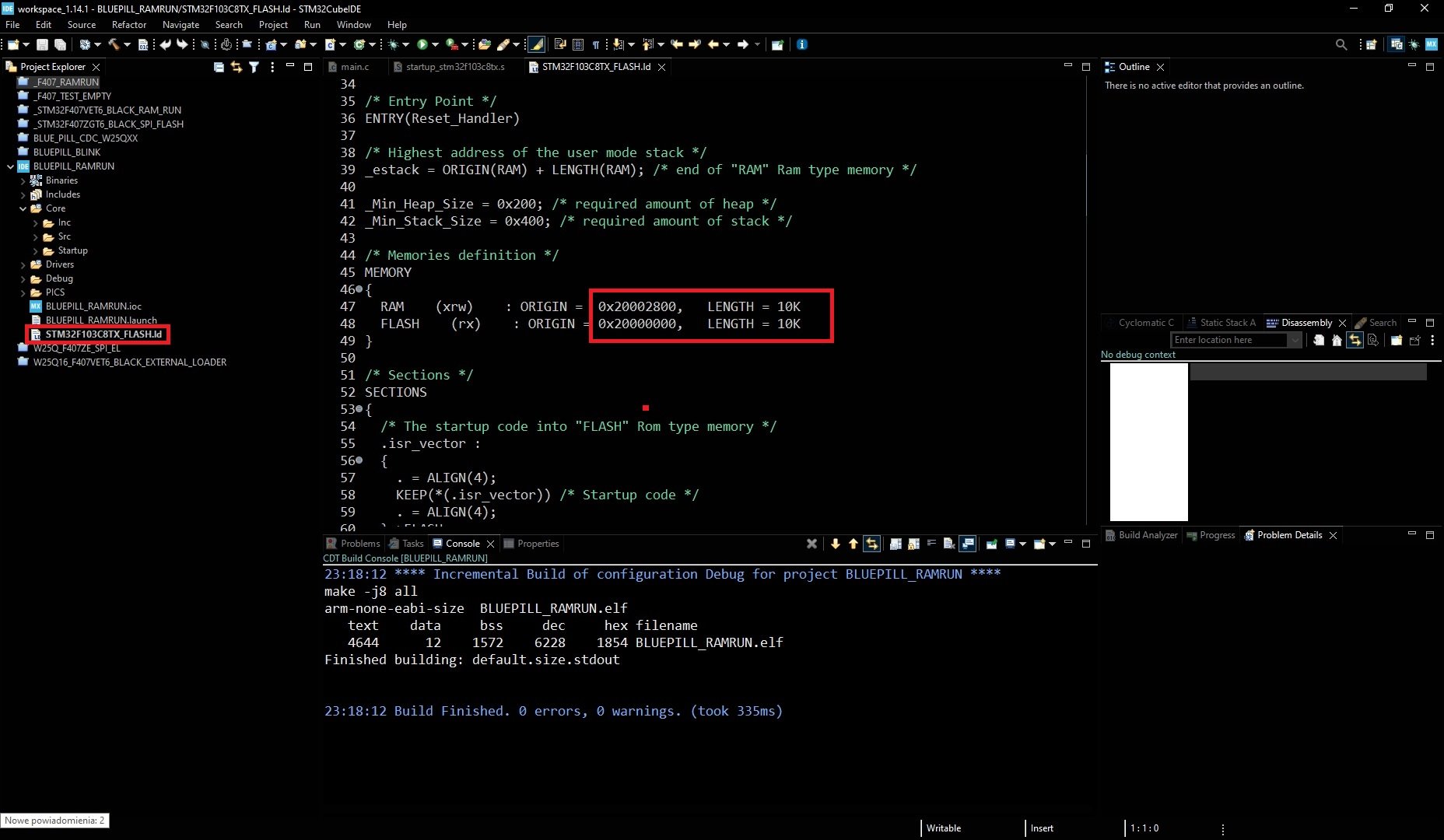
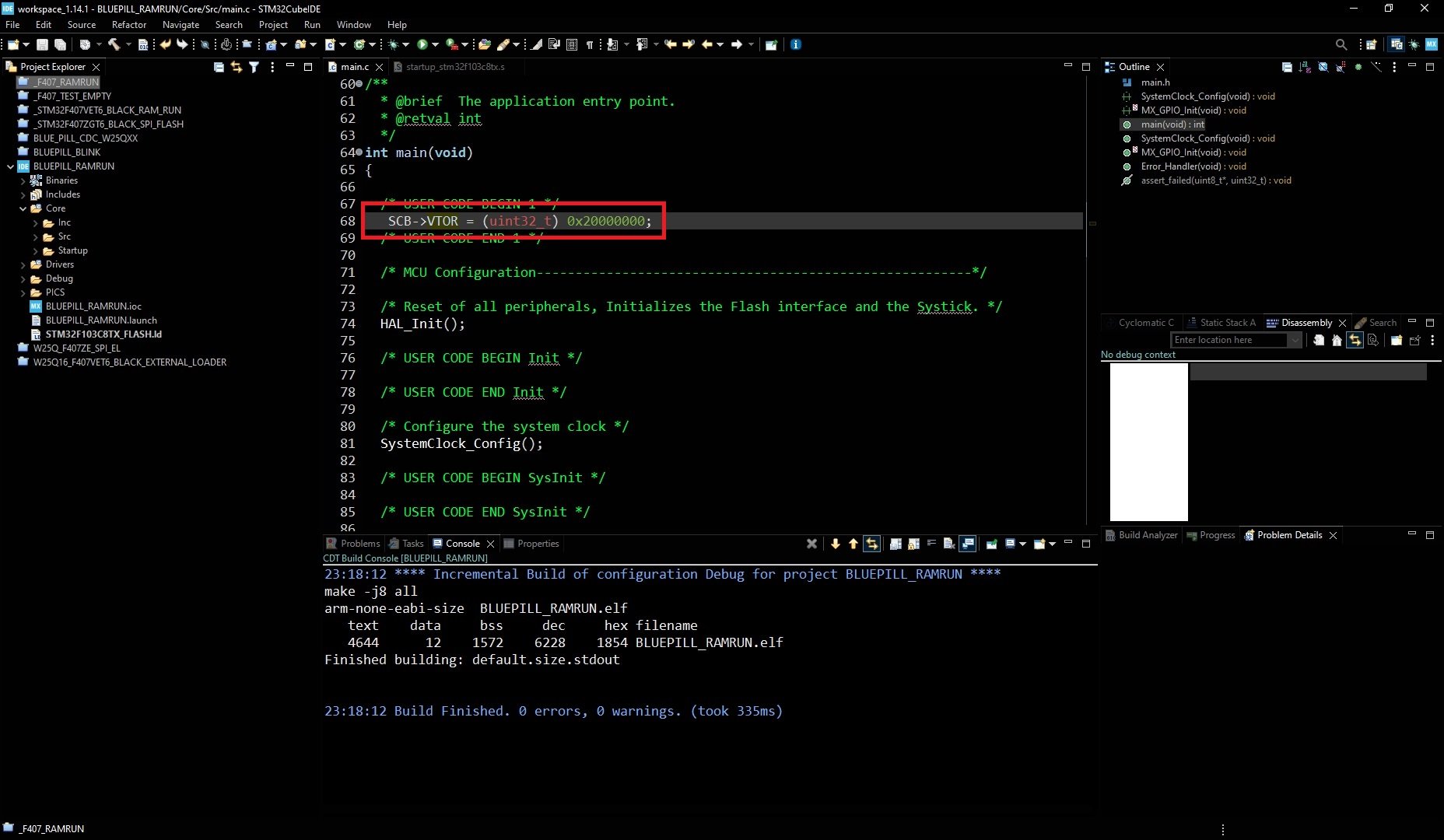
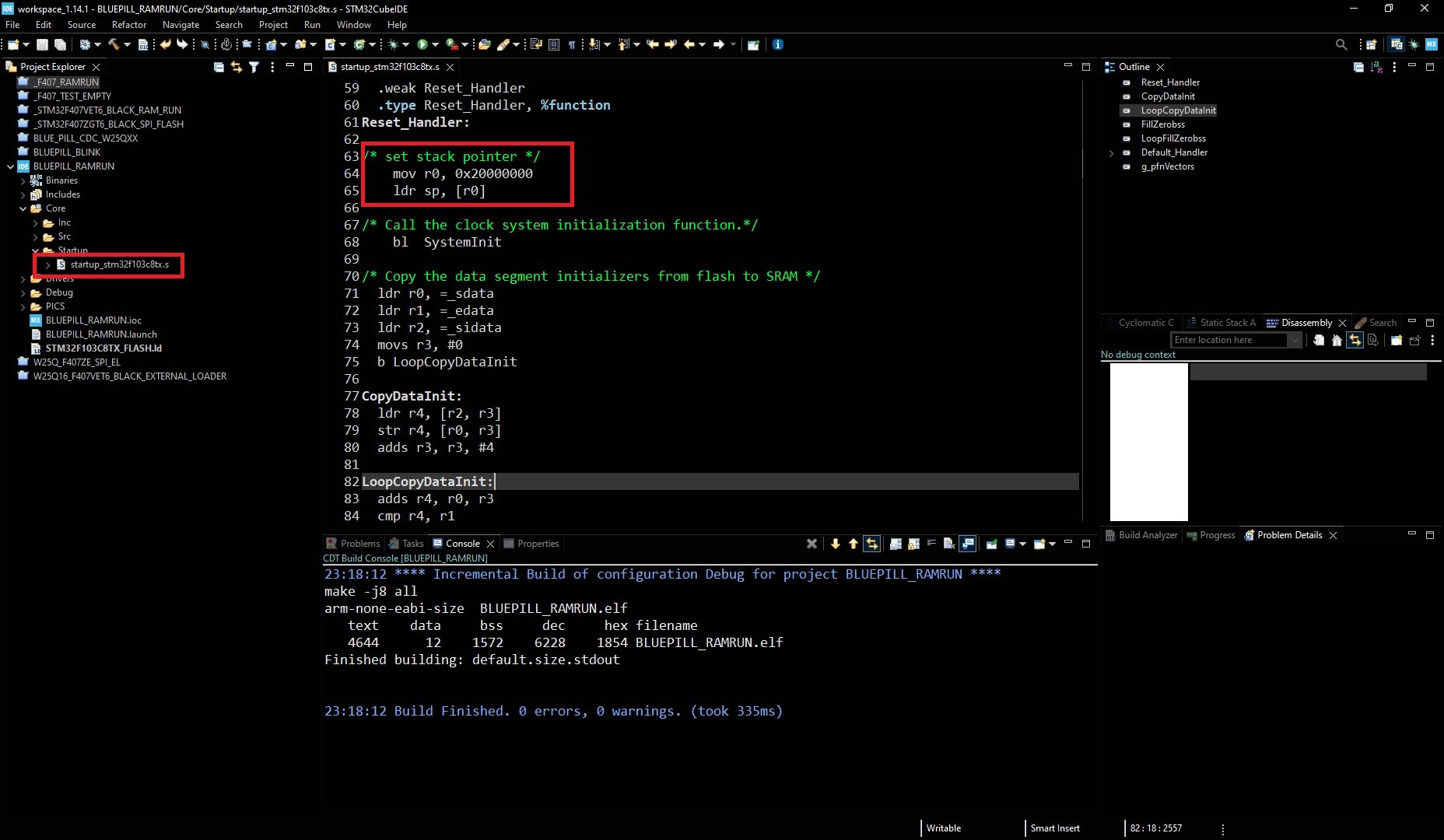
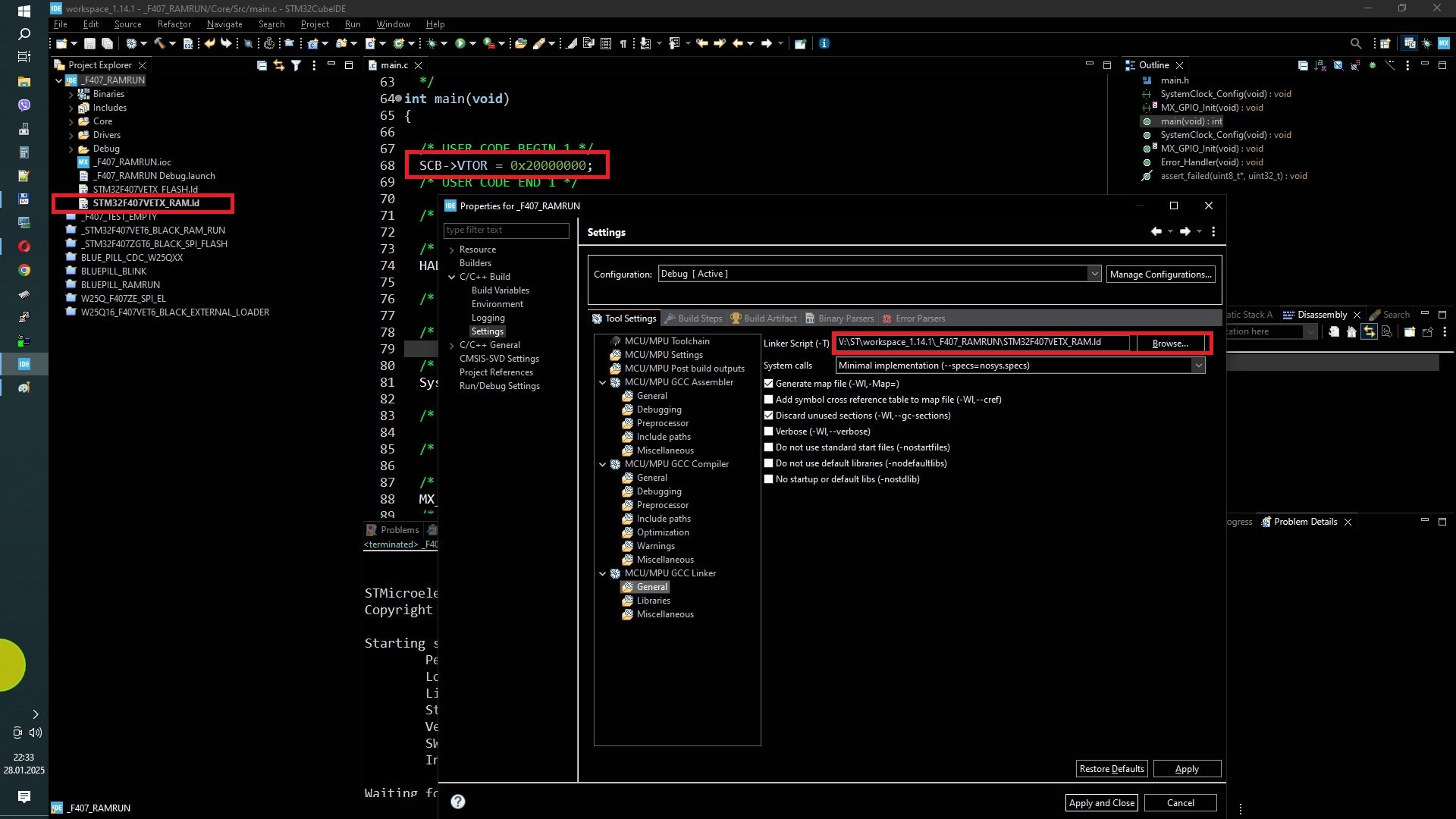
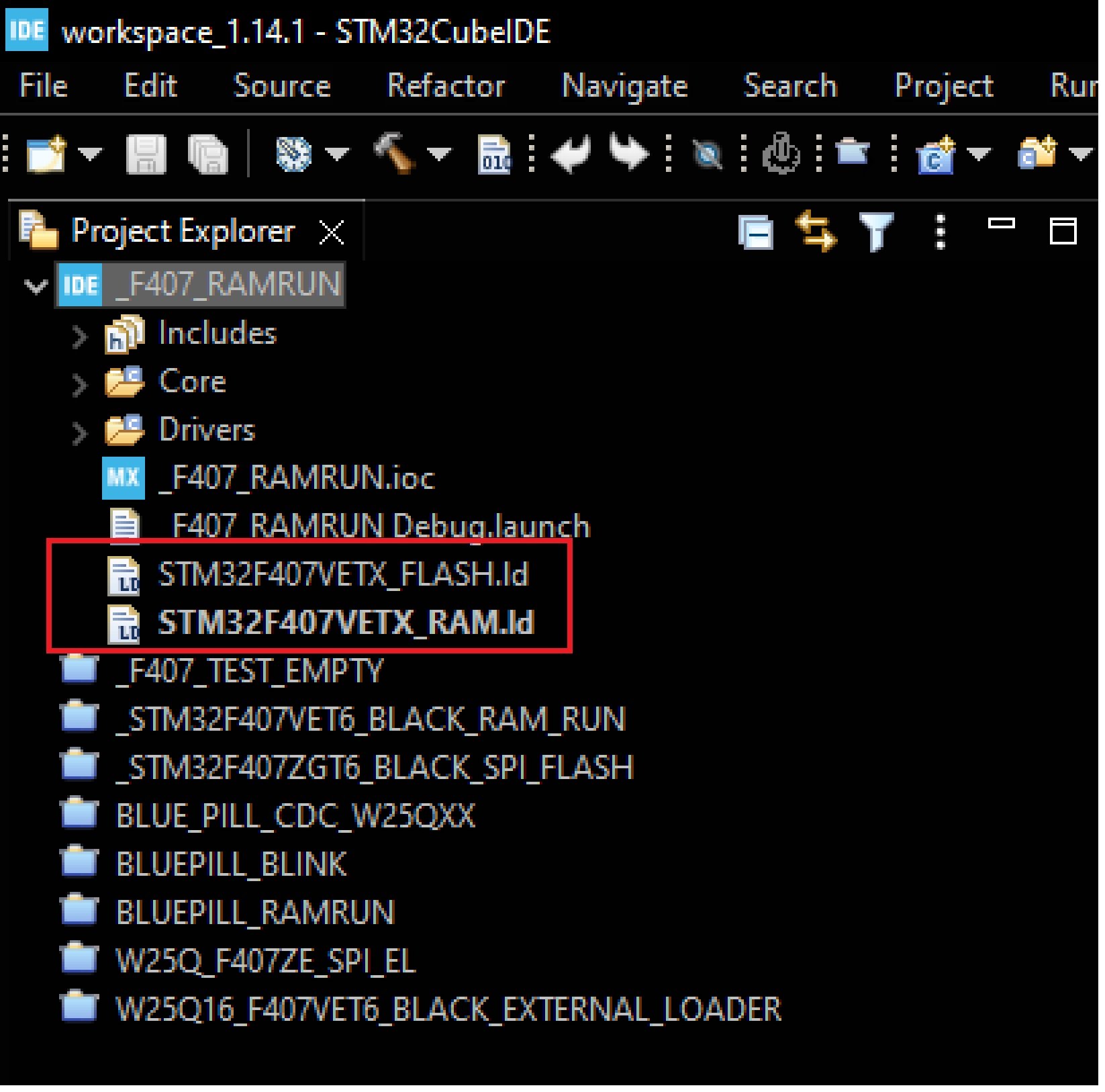
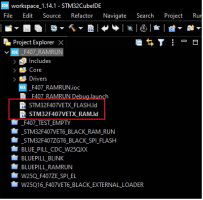
Jak w temacie - oczywiście pod warunkiem, że program się w RAM'ie zmieści. Zdarza się, że uruchomienie programu w RAM jest bardzo wygodne. W moim przypadku mam external loadery, które zapisują flash SPI przy użyciu ST-LINK UTILITY, albo STM32CubeProgrammer. Problem z tymi aplikacjami jest taki, że o ile zapis do pamięci flash jest bezbłędny, o tyle odczyt czy weryfikacja nie przebiega poprawnie, chociaż dane w pamięci SPI flash zostały właściwie zapisane. Oprócz weryfikacji chciałbym mieć możliwość odczytywania do pliku danych zawartych w tych pamięciach flash i w tym momencie bardzo wygodnie jest wrzucić program do RAM, odczytać żądane dane swoim programem na VCP, nie naruszając programu głównego osadzonego we flaszu mikrokontrolera. Oczywiście wielka szkoda że firmowe programy tego nie uciągną i trzeba to rozwiązać we własnym zakresie. Odnalazłem 2 metody do linkowania programu w RAM. Pierwszą zastosowałem dla BLUEPILL'a PLUS (F103). Wystarczy podać linkerowi że początkowa część RAM jest pamięcią flash. MEMORY { RAM (xrw) : ORIGIN = 0x20002800, LENGTH = 10K FLASH (rx) : ORIGIN = 0x20000000, LENGTH = 10K } Druga rzecz, to dodanie 2 linii w startupie do zainicjalizowania stosu (SP) Reset_Handler: /* set stack pointer */ mov r0, 0x20000000 ldr sp, [r0] Trzecia rzecz, aby wszystko sprawnie działało z przerwaniami, to relokacja tablicy wektorów za pomocą rejestru SCB->VTOR SCB->VTOR = (uint32_t) 0x20000000; I... już - program działa, przerwania dla HAL_Delay(500) przychodzą od Systicka i wszystko pięknie śmiga. Pierwszy sposób, choć prosty, jest troszkę mniej poręczny od drugiego, w którym nie trzeba sztucznie dzielić pamięci RAM na FLASH i RAM. Drugi przykład wykonałem dla zestawu "Black board F407VE". Druga metoda jest dzięki uprzejmości MCD Application Team, który od pewnego czasu dla niektórych procesorów zaczął zamieszczać dwie wersje skryptu linkera, pierwszy z postfixem "FLASH", drugi z postfixem "RAM". Otóż wystarczy tylko w ustawieniach podmienić nazwę pliku linkera i na początku funkcji "main" zmienić adres tablicy wektorów jak w przypadku F103. Teraz jeszcze jedna rzecz - można by faktycznie binarki tych programów dołączać do programu we flaszu, który po resecie przepisywałby go do RAM, ale z drugiej strony... jaki sens ma umieszczenie programu z RAM we flash? Trochę dziwnie prawda? Chodzi mi o to, że takie programy z RAM zgodnie ze specyfikacją ARM'ów nie mają prawa uruchomić się, ponieważ proc startuje się z flasza!!! Co więcej, nawet gdyby zmieniono bootowanie na pamięć RAM, to nadal niewiele daje, ponieważ po odłączeniu zasilania w RAM przy starcie procka wartości są po prostu RANDOMOWE! I tutaj z pomocą przychodzi kolejny raz support STM32, który za pomocą programatora ST-link robi taką sztuczkę, że odczytuje adres startu programu (Entry Point) z tablicy wektorów i po zaprogramowaniu RAMu naszym programem na końcu rejestr PC zostaje zainicjowany adresem do Entry Pointa ! Prawda że genialne? W przypadku botowania ustawionego na flash program działa do pierwszego hardware'owego resetu. Nie sprawdzałem opcji, gdy bootowanie ustawione jest na RAM, ale według specyfikacji program powinien działać od nowa po hardware'owym resecie do momentu wyłączenia zasilania. W załączeniu programy: BLUEPILL_RAMRUN.zip , _F407_RAMRUN.zip Linki do repozytoriów na github: BLUEPILL PLUS RAM RUNNING STM32F407VET6 BLACK RUNNING IN RAM






-
- 1
-
-
- ARM
- PROGRAMOWANIE
- (i 1 więcej)
-
 Witam. Podczas robienia stacji pogodowej z czujnikiem DHT22 oraz ATTiny85 na wyświetlaczu pojawiło się za dużo liczb. Ja bym chciał żeby pojawiły się same cyferki 26, 63 oraz znaki °C i %. Kod który pisałem i wgrałem: #include "DHT.h" #include <Wire.h> #include <LiquidCrystal_I2C.h> LiquidCrystal_I2C lcd(0x27,16,2); DHT dht; byte znak_stopnia[8] = { 0b00111, 0b00101, 0b00111, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000 }; int w; int t; void setup(){ dht.setup(4); lcd.init(); lcd.backlight(); lcd.print("Temperatura"); lcd.setCursor(0,1); lcd.print("Wilgotnosc"); lcd.createChar(1, znak_stopnia); lcd.setCursor(14,0); lcd.write(1); lcd.print("C"); lcd.setCursor(13,1); lcd.print("%"); } void loop(){ w = dht.getHumidity(); t = dht.getTemperature(); lcd.setCursor(12,0); lcd.print(t); lcd.setCursor(11,1); lcd.print(w); } Biblioteka którą użyłem do DHT to ta: https://github.com/jscrane/DHT?tab=readme-ov-file. Podłączenie jest dobre. Teraz ja proszę o pomoc w zasłonięciu tych dodatkowych cyferek żeby wyglądało to w ten sposób: Z góry dziękuję za poświęcony czas!
Witam. Podczas robienia stacji pogodowej z czujnikiem DHT22 oraz ATTiny85 na wyświetlaczu pojawiło się za dużo liczb. Ja bym chciał żeby pojawiły się same cyferki 26, 63 oraz znaki °C i %. Kod który pisałem i wgrałem: #include "DHT.h" #include <Wire.h> #include <LiquidCrystal_I2C.h> LiquidCrystal_I2C lcd(0x27,16,2); DHT dht; byte znak_stopnia[8] = { 0b00111, 0b00101, 0b00111, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000 }; int w; int t; void setup(){ dht.setup(4); lcd.init(); lcd.backlight(); lcd.print("Temperatura"); lcd.setCursor(0,1); lcd.print("Wilgotnosc"); lcd.createChar(1, znak_stopnia); lcd.setCursor(14,0); lcd.write(1); lcd.print("C"); lcd.setCursor(13,1); lcd.print("%"); } void loop(){ w = dht.getHumidity(); t = dht.getTemperature(); lcd.setCursor(12,0); lcd.print(t); lcd.setCursor(11,1); lcd.print(w); } Biblioteka którą użyłem do DHT to ta: https://github.com/jscrane/DHT?tab=readme-ov-file. Podłączenie jest dobre. Teraz ja proszę o pomoc w zasłonięciu tych dodatkowych cyferek żeby wyglądało to w ten sposób: Z góry dziękuję za poświęcony czas!

-
Dzień dobry, od niedawna próbuję stworzyć grę, chodzi o to że diody migają na lewo i prawo, a gracz ma wcisnąć przycisk aby miganie się zatrzymało. W zależności od tego na jakiej diodzie LED gracz zatrzyma, dostanie punkty (wyświetlane na LCD). I teraz chodzi o to że muszę w jednym kodzie sprawdzać czy przycisk nie został naciśnięty, i kontrolować miganie diod LED. Gdyby była opcja dwóch funkcji void loop to problem by był rozwiązany. Więc, czy można w jednym kodzie mieć dwie funkcje loop? Jeśli tak to proszę powiedzieć jak tego użyć, a jeśli nie to jak wykorzystać jedną funkcję loop do tego co chcę zrobić. Z góry dziękuję!
-
Dzień dobry, ostatnio pytałem się jaki Attiny do wyświetlacza LCD I2C, wszyscy polecali mi Attiny85. Czy może ktoś mi powiedzieć jak programować to Attiny? Bardzo proszę zwrócić uwagę że jestem początkującym i proszę nie używać mega skomplikowanych słów Z góry dziękuję odpowiedź
-
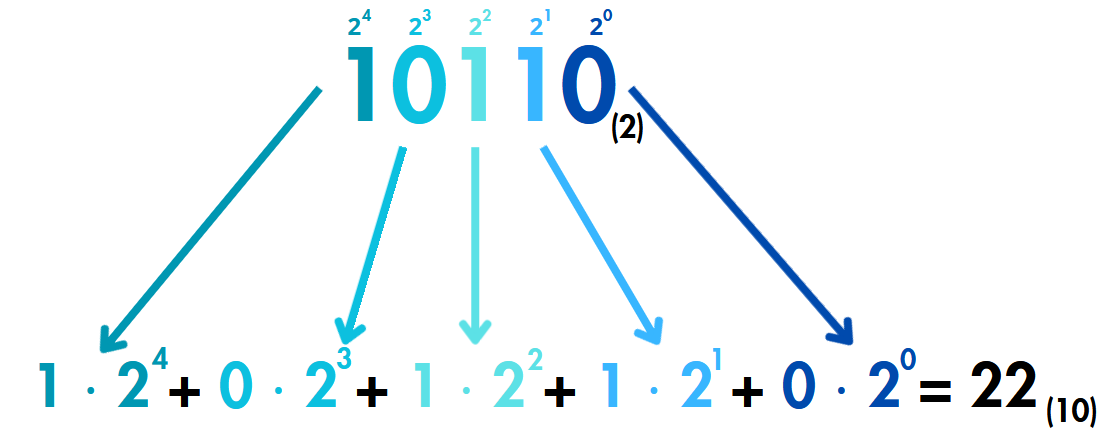
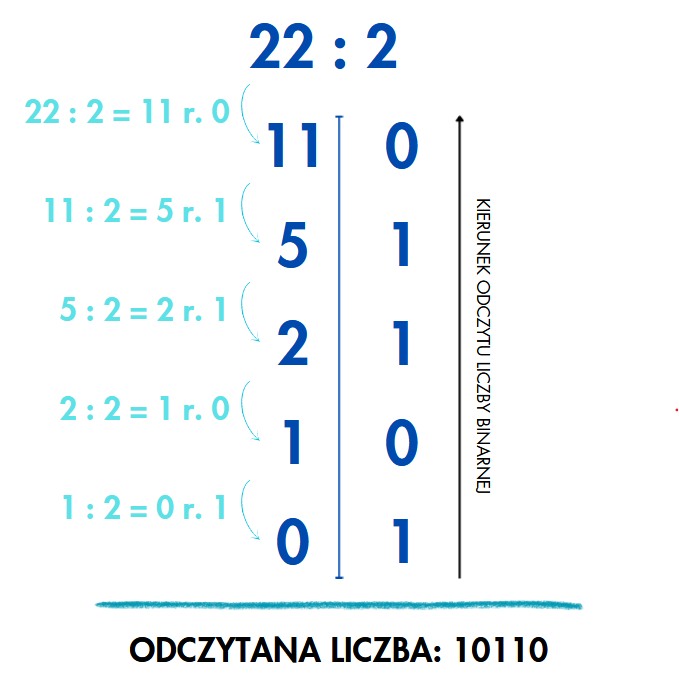
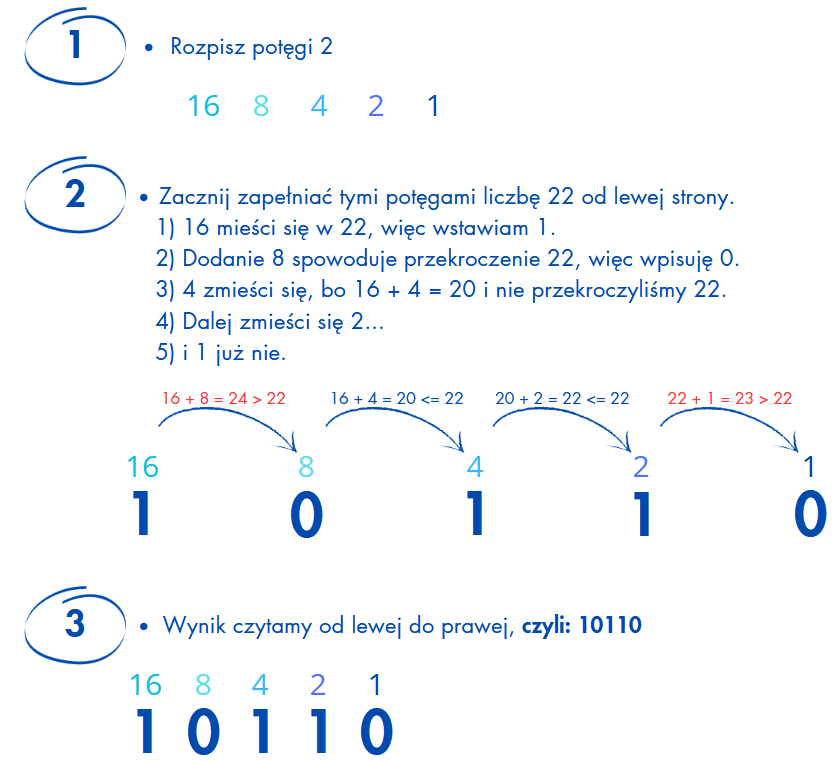
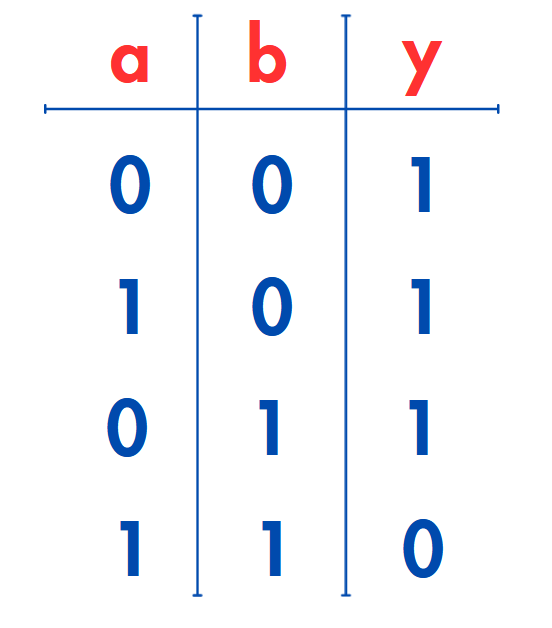
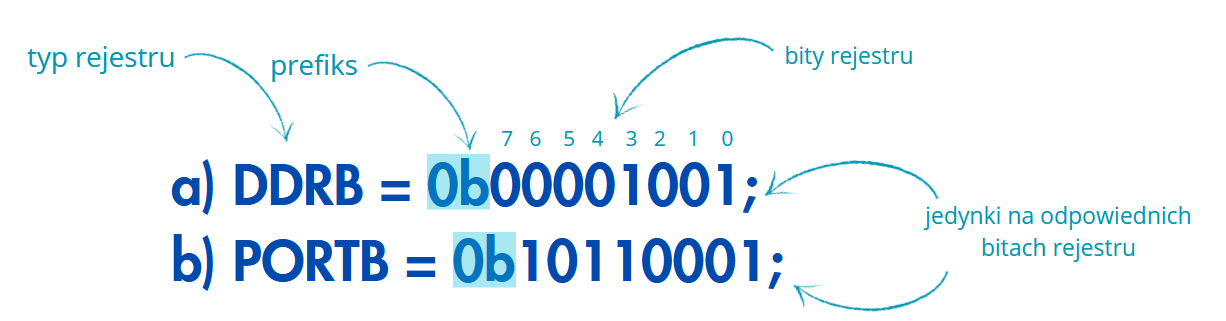
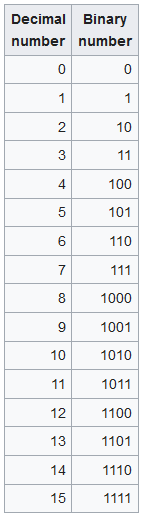
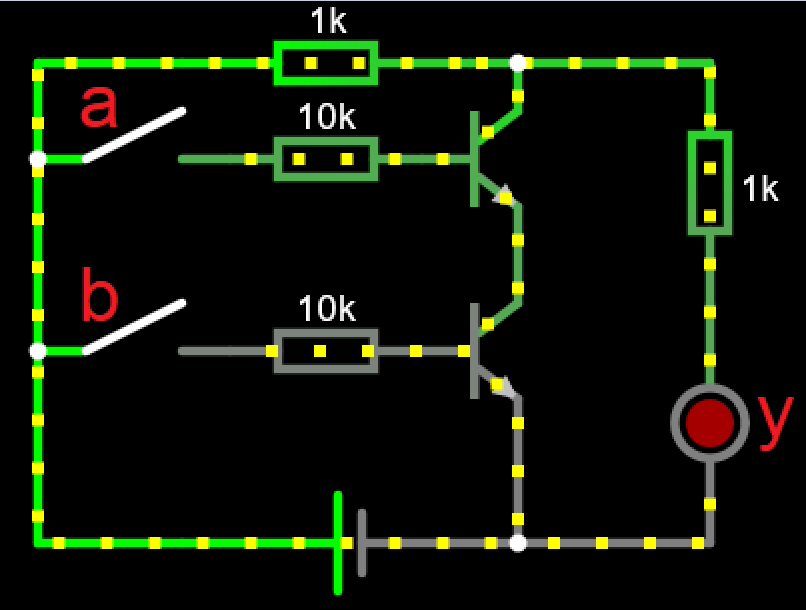
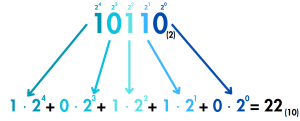
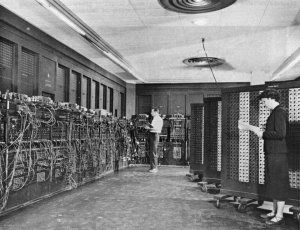
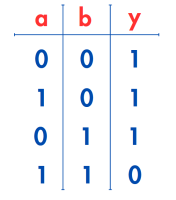
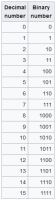
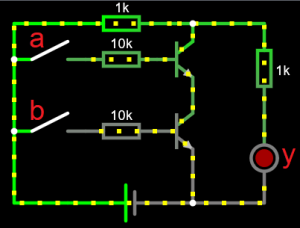
 Kiedy dam Ci zadanie: dodaj do siebie 3 i 6 i podaj wynik, to na 90% podasz automatyczną odpowiedź 9. Względnie proste operacje matematyczne są dla nas naturalne do rozwiązania, bo niemal codziennie takie rozwiązujemy. Natomiast ciężej jest z operacją 11+1, bo odpowiedzią nie musi być 12. Co gorsza odpowiedź do pierwszego przykładu nie musi wynosić 9! W języku mówionym każda wypowiedź jest zależna od kontekstu. Mówiąc zamek możemy mieć na myśli budynek lub zapięcie od kurtki. Tak samo jest z liczbami. Wynik zależy od kontekstu, w jakim dokonujemy obliczeń, a taki kontekst nazywamy systemem - ogólnie systemem liczbowym. Jednym z najpopularniejszych systemów liczbowych jest system binarny. Źródło zdjęcia. Innymi słowy, system liczbowy jest zbiorem reguł, według którego zapisywane są liczby. Jego nazwa definiuje, ile znaków służy do zapisu liczb. Przykładowo system czwórkowy korzysta z liczb od 0 do 3, czyli korzysta z 4 cyfr. Ludzie korzystają z systemu dziesiętnego, który jest systemem pozycyjnym. Oznacza to, że cyfry w liczbie określają ilość jedności, dziesiątek, setek itp. Te jedności, dziesiątki nazwiemy wagami. Przykładowo: liczba 375, to tak naprawdę: 3 setki, 7 dziesiątek i 5 jedności, 3 * 100 + 7 * 10 + 5 * 1, 3 * 102 + 7 * 101 + 5 * 100. Zauważmy, że wagi określa się jako potęgi liczby definiującej system liczbowy do pozycji liczby od prawej strony zaczynając od zera. Istnieją różne systemy liczbowe. Najpopularniejsze z nich to: Dwójkowy (binarny): np. 1011 (dziesiętnie: 11), do zapisu liczb używa się 0 i/lub 1. Czwórkowy: np. 3102 (dziesiętnie: 210), używa się cyfr 0-3. Ósemkowy (oktalny): np. 75 (dziesiętnie 61), używa się cyfr 0-7. Dziesiętny (decymalny): np. 599, używa się cyfr 0-9. Szesnastkowy (heksadecymalny): np. 6F (dziesiętnie 95), używa się cyfr 0 - F. Występują tutaj dodatkowe symbole dla liczb większych od 9: A = 10, B = 11, C = 12, itd. do F = 15. W tym artykule skupimy się na systemie dwójkowym, czyli jednym z najważniejszych systemów w informatyce, elektronice i ogólnie technice Dlaczego systemu binarnego używa się w informatyce i elektronice? Tak naprawdę jest to spowodowane wygodą przesyłania informacji. Pojawienie się napięcia może oznaczać 1, a jego brak 0. Wprowadzenie większej ilości wartości, takich jak różne poziomy napięcia, wprowadza dodatkową złożoność takiego systemu, ponieważ wymaga interpretacji różnych wartości, co może stanowić wyzwanie. We wczesnym etapie rodzenia się komputerów binarność nie była oczywista, co potwierdza skonstruowanie komputera ENIAC, który był komputerem wykorzystującym system dziesiątkowy. Komputery jakie znamy obecnie to cud techniki, którym początki dał m.in. ENIAC. Źródło zdjęcia. Konwersja liczb binarnych i dziesiętnych Jak już wcześniej zostało wspomniane, liczba binarna składa się z samych zer i jedynek. Abyśmy mogli ją zrozumieć po naszemu, czyli jako liczbę dziesiętną, należy dokonać kilku obliczeń - konwersji. Poniżej przedstawiam kilka sposobów na przekształcanie liczb. Tabela powyżej przedstawia liczby dziesiętne i odpowiadające im liczby binarne. Źródło zdjęcia. a) Zamiana przy użyciu operacji modulo (dec → bin) Ta metoda jest wolna i bardzo algorytmiczna. Liczbę dzieli się całkowicie przez 2 i zapisuje się resztę z dzielenia. Powtarza się to do momentu, aż w wyniku dzielenia znajdzie się 0. Wynik odczytywany jest od końca. Zgodnie z powyższą grafiką za każdym razem dzielimy wyższą liczbę. Wynik dzielenia całkowitego zapisujemy w lewej kolumnie a resztę z dzielenia po prawej. Wynik, czyli liczbę binarną, odczytuje się od dołu do góry. Tę metodę można zastosować do jakiegokolwiek systemu liczbowego. Gdyby 22 zacząć dzielić całkowicie przez np. 8, to reszty z dzielenia wskazałyby nam liczbę ósemkową. b) Zapełnianie potęgami (dec → bin) Jest to zdecydowanie szybsza i prostsza metoda. Zamienianą liczbę dziesiętną nazwijmy x. Rozpisz potęgi dwójki (20, 21, 22…) od prawej do lewej, do ostatniej liczby, która jest mniejsza lub równa x. Zapełnianie zacznij od lewej strony, czyli od najwyższej potęgi. Pierwsza potęga mieści się w x, dlatego zapisz pod nią 1. Przejdź od lewej do prawej strony zapisując jedynkę pod tymi potęgami, które w sumie z poprzednimi pod którymi znajduje się 1 nie przekracza x. Wpisz 0 pod tymi potęgami, które już nie mieszczą się w x. Wynik przeczytaj od lewej do prawej. c) Konwersja za pomocą wag (bin → dec) W tej metodzie korzystamy z definicji systemu liczbowego, która została przedstawiona wcześniej. Każda cyfra na konkretnej pozycji definiuje wagę tej pozycji. Uwaga: aby podkreślić w zapisie liczby w jakim systemie jest ona zapisana, pisze się w indeksie dolnym w nawiasach podstawę systemu danej liczby. Przeliczmy liczbę 10110(2): Podstawą systemu w liczbie binarnej jest 2. Cyfra na ostatniej pozycji ma wagę 20, przedostatnia 21, kolejna 22 itp. Mnożymy wagi przez cyfry na ich pozycjach. Każdy iloczyn dodajemy. Zauważ, że wstępie w przykładzie z liczbą 375(10) dokonaliśmy tak naprawdę zamiany liczby dziesiętnej na dziesiętną korzystając z powyżej metody d) Ręczne dodawanie już obliczonych wag (binarna → dziesiętna) Wiemy już, że wagi są przedstawiane jako potęgi, więc gdy nadchodzi potrzeba przeliczenia liczby binarnej na kartce, to możemy dodawać tylko te wagi przy których stoi jedynka. Jest to uproszczenie poprzedniej metody. Animacja przedstawiająca zamianę liczby decymalnej na postać binarną. Źródło animacji. Zastosowania logiki binarnej i liczb binarnych 1) Tranzystor jako element binarny Jeżeli wykorzystamy tranzystor jako włącznik (klucz), to możemy powiedzieć, że działa on w logice binarnej. Gdy wymusimy odpowiednio duży przepływ prądu bazy tranzystora NPN, to doprowadzimy tranzystor do stanu nasycenia, czyli popłynie prąd przez kolektor. Ten prąd możemy traktować jako wyjście i jego przepływ jako logiczne 1. Brak tego prądu to 0. Działanie tranzystora NPN jako klucz. 2) Bramka logiczna NAND Wykorzystując wiedzę z poprzedniego punktu, możemy zacząć konstruować tak zwane bramki logiczne, czyli układy, których kombinacja wejść da nam jakieś wyjście. NAND jest bardzo ważną bramką logiczną, bo dzięki niej można zbudować układ realizujący dowolną funkcję logiczną. Wykonajmy ją używając tranzystorów bipolarnych NPN! Schemat bramki NAND. Jako wejścia interpretujemy bazy tranzystorów, a wyjściem jest prąd kolektora pierwszego tranzystora. Potocznie mówi się, że prąd płynie najkrótszą i najprostszą drogą, więc załączenie dwóch tranzystorów powinno skutkować praktycznie zwarciem kolektora wyższego tranzystora z masą źródła. Co za tym idzie prąd wybierze tę drogę zamiast diody (wyjście y) i dioda przestanie świecić - na wyjściu pojawi się 0. Tablica prawdy dla układu NAND. Działanie bramki NAND skonstruowanej z tranzystorów. Dzięki tranzystorom i traktowaniu ich jako elementów binarnych możemy manipulować sygnałem i budować elementy cyfrowe, które działają w logice binarnej. To wszystko dzięki działaniom na liczbach binarnych i wykorzystaniu algebry Boole’a. 3) Tranzystory w procesorze W procesorze raczej nie stosuje się tranzystorów bipolarnych. Współczesne procesory są zbudowane w technologii CMOS (Complementary Metal-Oxide-Semiconductor). Są one używane do budowy bramek logicznych, które z kolei formują układy logiczne odpowiedzialne za operacje arytmetyczne, logiczne i sterujące w procesorze. Procesory są praktycznie stworzone z tranzystorów i bazują na ich działaniu. W jednym procesorze może być ich aż 17 miliardów! To nie są oczywiście tranzystory w obudowie typu TO-92. Ich konstrukcja jest dużo bardziej złożona i szerokość takiego elementu może wynosić 100 nanometrów. Współczesne procesory mają ogromną liczbę tranzystorów na pojedynczym układzie scalonym, co pozwala na wykonywanie bardzo skomplikowanych obliczeń w bardzo krótkim czasie. Miniaturyzacja postępuje zgodnie z prawem Moore’a, co pozwala na zwiększenie gęstości integracji i poprawę wydajności procesora. Cała ta złożoność mikroarchitektury procesora jest ukierunkowana na efektywne wykonywanie instrukcji programu zgodnie z zasadami logiki binarnej. Najmniejsze elementy współczesnych procesorów nie da się zobaczyć ludzkim okiem. Potrzeba do tego bardzo dobrego mikroskopu. Źródło zdjęcia. 4) Programowanie mikrokontrolerów Mikrokontroler to układ scalony, który zachowuje się jak mały komputer. Możemy dołączyć do niego wejścia i wyjścia takie jak: przyciski, czujniki i diody. Dzięki wgranemu programowi może on interpretować wejścia i sterować wyjściami. Z mikrokontrolerami wiążą się rejestry - pamięci wewnętrzne, które służą do przechowywania danych tymczasowych. Dzięki takiemu rejestrowi możemy zdefiniować, że jedna nóżka mikrokontrolera będzie wejściem, a druga wyjściem. Co więcej, dzięki tej pamięci możemy sprawić, że LED dołączony do wyjścia układu scalonego zapali się. Na razie zapamiętaj, że: Rejestr DDRx odpowiada za ustawienie kierunku przepływu danych. Innymi słowy dajemy informację mikrokontrolerowi, że dany pin jest wejściem lub wyjściem. W miejscu x wpisuje się port, który chcemy skonfigurować, np. A, B, C. W danym bicie wpisuje się 0 jeżeli pin ma być wejściem i 1 jeżeli ma być wyjściem. Rejestr PORTx służy do ustawiania stanów na konkretnych pinach. Jeżeli chcemy ustawić stan wysoki na jakimś pinie to należy ustawić na odpowiednim bicie 1. 0 ustawi stan niski. Rejestry portu B mikrokontrolera Atmega16. Jak w taki rejestr wpisać informację? Tutaj możemy skorzystać z liczb binarnych! Przykład a) Ustawić w rejestrze DDRB jedynkę na bitach 0 i 3. b) Ustawić w rejestrze PORTB jedynkę na bitach 0, 4, 5 i 7. Jest kilka sposobów na wykonanie tego zadania. Zapis za pomocą liczby binarnej Aby w języku C zapisać liczbę binarną należy dodać prefiks 0b. Możemy wykorzystać liczby binarne, aby wpisać dane w rejestr, ponieważ rejestry interpretuje się za pomocą bitów. Zapis za pomocą liczby dziesiętnej Aby to zrobić musimy przeliczyć liczbę binarną na dziesiętną. Bardziej doświadczeni programiści pewnie będą to w stanie zrobić szybko w głowie a) 0b00001001(2) = 00001001(2) = 1001(2) = 9(10) DDRB = 9; b) 0b10110001(2) = 10110001(2) = 177(10) PORTB = 177; Ten zapis może być nieczytelny, ale jest jeden wyjątek, gdzie warto go stosować. Jeżeli chcemy zapełnić jedynkami cały rejestr, to można wpisać do niego wartość 255, ponieważ 255(10) = 11111111(2). Oczywiście można skorzystać z innych systemów liczbowych, np. hex (0xFF(16) = 255(10)) Jeżeli chcesz dowiedzieć się o zastosowaniu rejestrów, to zapraszam do kursu STM32L4. 5) Sterowniki PLC Używa się je w maszynach przemysłowych i do sterowania liniami produkcyjnymi - ogólnie w przemyśle. Gwarantują one stabilność i ciągłość procesu a ponadto spełniają szereg przepisów. Dzięki nim można projektować układy sterowania dyskretnego, czyli procesy przemysłowe, które działają w logice dwuwartościowej. Przykłady maszyn, którymi sterują sterowniki PLC: windy, prasy hydrauliczne, schody ruchome, układ świateł na skrzyżowaniu. Te układy mogą charakteryzować się binarnością, tzn. do ich działania nie muszą być wykorzystywane elementy, które na swoim wejściu/wyjściu otrzymują/zwracają coś innego niż logiczne 0/1. W algorytmach sterowania takimi obiektami stosuje się operatory logiczne typu: AND, OR, XOR… co potwierdza zastosowanie liczb binarnych i logiki binarnej w tych sterownikach. Podsumowanie System binarny stanowi fundament technologii, elektroniki i informatyki. Jest nie tylko teoretycznym konceptem, ale także praktycznym elementem współczesności. Jego znaczenie sięga od konstrukcji tranzystorów przez układy cyfrowe, aż po programowanie mikrokontrolerów i sterowanie maszynami przemysłowymi. System binarny stanowi nieodłączną część świata, stanowiąc podstawę dla licznych innowacji i osiągnięć technologicznych. Każdy informatyk, elektronik, inżynier powinien się z nim zapoznać i zrobić przynajmniej jedno ćwiczenie z konwersji liczby dziesiętnej na binarną
Kiedy dam Ci zadanie: dodaj do siebie 3 i 6 i podaj wynik, to na 90% podasz automatyczną odpowiedź 9. Względnie proste operacje matematyczne są dla nas naturalne do rozwiązania, bo niemal codziennie takie rozwiązujemy. Natomiast ciężej jest z operacją 11+1, bo odpowiedzią nie musi być 12. Co gorsza odpowiedź do pierwszego przykładu nie musi wynosić 9! W języku mówionym każda wypowiedź jest zależna od kontekstu. Mówiąc zamek możemy mieć na myśli budynek lub zapięcie od kurtki. Tak samo jest z liczbami. Wynik zależy od kontekstu, w jakim dokonujemy obliczeń, a taki kontekst nazywamy systemem - ogólnie systemem liczbowym. Jednym z najpopularniejszych systemów liczbowych jest system binarny. Źródło zdjęcia. Innymi słowy, system liczbowy jest zbiorem reguł, według którego zapisywane są liczby. Jego nazwa definiuje, ile znaków służy do zapisu liczb. Przykładowo system czwórkowy korzysta z liczb od 0 do 3, czyli korzysta z 4 cyfr. Ludzie korzystają z systemu dziesiętnego, który jest systemem pozycyjnym. Oznacza to, że cyfry w liczbie określają ilość jedności, dziesiątek, setek itp. Te jedności, dziesiątki nazwiemy wagami. Przykładowo: liczba 375, to tak naprawdę: 3 setki, 7 dziesiątek i 5 jedności, 3 * 100 + 7 * 10 + 5 * 1, 3 * 102 + 7 * 101 + 5 * 100. Zauważmy, że wagi określa się jako potęgi liczby definiującej system liczbowy do pozycji liczby od prawej strony zaczynając od zera. Istnieją różne systemy liczbowe. Najpopularniejsze z nich to: Dwójkowy (binarny): np. 1011 (dziesiętnie: 11), do zapisu liczb używa się 0 i/lub 1. Czwórkowy: np. 3102 (dziesiętnie: 210), używa się cyfr 0-3. Ósemkowy (oktalny): np. 75 (dziesiętnie 61), używa się cyfr 0-7. Dziesiętny (decymalny): np. 599, używa się cyfr 0-9. Szesnastkowy (heksadecymalny): np. 6F (dziesiętnie 95), używa się cyfr 0 - F. Występują tutaj dodatkowe symbole dla liczb większych od 9: A = 10, B = 11, C = 12, itd. do F = 15. W tym artykule skupimy się na systemie dwójkowym, czyli jednym z najważniejszych systemów w informatyce, elektronice i ogólnie technice Dlaczego systemu binarnego używa się w informatyce i elektronice? Tak naprawdę jest to spowodowane wygodą przesyłania informacji. Pojawienie się napięcia może oznaczać 1, a jego brak 0. Wprowadzenie większej ilości wartości, takich jak różne poziomy napięcia, wprowadza dodatkową złożoność takiego systemu, ponieważ wymaga interpretacji różnych wartości, co może stanowić wyzwanie. We wczesnym etapie rodzenia się komputerów binarność nie była oczywista, co potwierdza skonstruowanie komputera ENIAC, który był komputerem wykorzystującym system dziesiątkowy. Komputery jakie znamy obecnie to cud techniki, którym początki dał m.in. ENIAC. Źródło zdjęcia. Konwersja liczb binarnych i dziesiętnych Jak już wcześniej zostało wspomniane, liczba binarna składa się z samych zer i jedynek. Abyśmy mogli ją zrozumieć po naszemu, czyli jako liczbę dziesiętną, należy dokonać kilku obliczeń - konwersji. Poniżej przedstawiam kilka sposobów na przekształcanie liczb. Tabela powyżej przedstawia liczby dziesiętne i odpowiadające im liczby binarne. Źródło zdjęcia. a) Zamiana przy użyciu operacji modulo (dec → bin) Ta metoda jest wolna i bardzo algorytmiczna. Liczbę dzieli się całkowicie przez 2 i zapisuje się resztę z dzielenia. Powtarza się to do momentu, aż w wyniku dzielenia znajdzie się 0. Wynik odczytywany jest od końca. Zgodnie z powyższą grafiką za każdym razem dzielimy wyższą liczbę. Wynik dzielenia całkowitego zapisujemy w lewej kolumnie a resztę z dzielenia po prawej. Wynik, czyli liczbę binarną, odczytuje się od dołu do góry. Tę metodę można zastosować do jakiegokolwiek systemu liczbowego. Gdyby 22 zacząć dzielić całkowicie przez np. 8, to reszty z dzielenia wskazałyby nam liczbę ósemkową. b) Zapełnianie potęgami (dec → bin) Jest to zdecydowanie szybsza i prostsza metoda. Zamienianą liczbę dziesiętną nazwijmy x. Rozpisz potęgi dwójki (20, 21, 22…) od prawej do lewej, do ostatniej liczby, która jest mniejsza lub równa x. Zapełnianie zacznij od lewej strony, czyli od najwyższej potęgi. Pierwsza potęga mieści się w x, dlatego zapisz pod nią 1. Przejdź od lewej do prawej strony zapisując jedynkę pod tymi potęgami, które w sumie z poprzednimi pod którymi znajduje się 1 nie przekracza x. Wpisz 0 pod tymi potęgami, które już nie mieszczą się w x. Wynik przeczytaj od lewej do prawej. c) Konwersja za pomocą wag (bin → dec) W tej metodzie korzystamy z definicji systemu liczbowego, która została przedstawiona wcześniej. Każda cyfra na konkretnej pozycji definiuje wagę tej pozycji. Uwaga: aby podkreślić w zapisie liczby w jakim systemie jest ona zapisana, pisze się w indeksie dolnym w nawiasach podstawę systemu danej liczby. Przeliczmy liczbę 10110(2): Podstawą systemu w liczbie binarnej jest 2. Cyfra na ostatniej pozycji ma wagę 20, przedostatnia 21, kolejna 22 itp. Mnożymy wagi przez cyfry na ich pozycjach. Każdy iloczyn dodajemy. Zauważ, że wstępie w przykładzie z liczbą 375(10) dokonaliśmy tak naprawdę zamiany liczby dziesiętnej na dziesiętną korzystając z powyżej metody d) Ręczne dodawanie już obliczonych wag (binarna → dziesiętna) Wiemy już, że wagi są przedstawiane jako potęgi, więc gdy nadchodzi potrzeba przeliczenia liczby binarnej na kartce, to możemy dodawać tylko te wagi przy których stoi jedynka. Jest to uproszczenie poprzedniej metody. Animacja przedstawiająca zamianę liczby decymalnej na postać binarną. Źródło animacji. Zastosowania logiki binarnej i liczb binarnych 1) Tranzystor jako element binarny Jeżeli wykorzystamy tranzystor jako włącznik (klucz), to możemy powiedzieć, że działa on w logice binarnej. Gdy wymusimy odpowiednio duży przepływ prądu bazy tranzystora NPN, to doprowadzimy tranzystor do stanu nasycenia, czyli popłynie prąd przez kolektor. Ten prąd możemy traktować jako wyjście i jego przepływ jako logiczne 1. Brak tego prądu to 0. Działanie tranzystora NPN jako klucz. 2) Bramka logiczna NAND Wykorzystując wiedzę z poprzedniego punktu, możemy zacząć konstruować tak zwane bramki logiczne, czyli układy, których kombinacja wejść da nam jakieś wyjście. NAND jest bardzo ważną bramką logiczną, bo dzięki niej można zbudować układ realizujący dowolną funkcję logiczną. Wykonajmy ją używając tranzystorów bipolarnych NPN! Schemat bramki NAND. Jako wejścia interpretujemy bazy tranzystorów, a wyjściem jest prąd kolektora pierwszego tranzystora. Potocznie mówi się, że prąd płynie najkrótszą i najprostszą drogą, więc załączenie dwóch tranzystorów powinno skutkować praktycznie zwarciem kolektora wyższego tranzystora z masą źródła. Co za tym idzie prąd wybierze tę drogę zamiast diody (wyjście y) i dioda przestanie świecić - na wyjściu pojawi się 0. Tablica prawdy dla układu NAND. Działanie bramki NAND skonstruowanej z tranzystorów. Dzięki tranzystorom i traktowaniu ich jako elementów binarnych możemy manipulować sygnałem i budować elementy cyfrowe, które działają w logice binarnej. To wszystko dzięki działaniom na liczbach binarnych i wykorzystaniu algebry Boole’a. 3) Tranzystory w procesorze W procesorze raczej nie stosuje się tranzystorów bipolarnych. Współczesne procesory są zbudowane w technologii CMOS (Complementary Metal-Oxide-Semiconductor). Są one używane do budowy bramek logicznych, które z kolei formują układy logiczne odpowiedzialne za operacje arytmetyczne, logiczne i sterujące w procesorze. Procesory są praktycznie stworzone z tranzystorów i bazują na ich działaniu. W jednym procesorze może być ich aż 17 miliardów! To nie są oczywiście tranzystory w obudowie typu TO-92. Ich konstrukcja jest dużo bardziej złożona i szerokość takiego elementu może wynosić 100 nanometrów. Współczesne procesory mają ogromną liczbę tranzystorów na pojedynczym układzie scalonym, co pozwala na wykonywanie bardzo skomplikowanych obliczeń w bardzo krótkim czasie. Miniaturyzacja postępuje zgodnie z prawem Moore’a, co pozwala na zwiększenie gęstości integracji i poprawę wydajności procesora. Cała ta złożoność mikroarchitektury procesora jest ukierunkowana na efektywne wykonywanie instrukcji programu zgodnie z zasadami logiki binarnej. Najmniejsze elementy współczesnych procesorów nie da się zobaczyć ludzkim okiem. Potrzeba do tego bardzo dobrego mikroskopu. Źródło zdjęcia. 4) Programowanie mikrokontrolerów Mikrokontroler to układ scalony, który zachowuje się jak mały komputer. Możemy dołączyć do niego wejścia i wyjścia takie jak: przyciski, czujniki i diody. Dzięki wgranemu programowi może on interpretować wejścia i sterować wyjściami. Z mikrokontrolerami wiążą się rejestry - pamięci wewnętrzne, które służą do przechowywania danych tymczasowych. Dzięki takiemu rejestrowi możemy zdefiniować, że jedna nóżka mikrokontrolera będzie wejściem, a druga wyjściem. Co więcej, dzięki tej pamięci możemy sprawić, że LED dołączony do wyjścia układu scalonego zapali się. Na razie zapamiętaj, że: Rejestr DDRx odpowiada za ustawienie kierunku przepływu danych. Innymi słowy dajemy informację mikrokontrolerowi, że dany pin jest wejściem lub wyjściem. W miejscu x wpisuje się port, który chcemy skonfigurować, np. A, B, C. W danym bicie wpisuje się 0 jeżeli pin ma być wejściem i 1 jeżeli ma być wyjściem. Rejestr PORTx służy do ustawiania stanów na konkretnych pinach. Jeżeli chcemy ustawić stan wysoki na jakimś pinie to należy ustawić na odpowiednim bicie 1. 0 ustawi stan niski. Rejestry portu B mikrokontrolera Atmega16. Jak w taki rejestr wpisać informację? Tutaj możemy skorzystać z liczb binarnych! Przykład a) Ustawić w rejestrze DDRB jedynkę na bitach 0 i 3. b) Ustawić w rejestrze PORTB jedynkę na bitach 0, 4, 5 i 7. Jest kilka sposobów na wykonanie tego zadania. Zapis za pomocą liczby binarnej Aby w języku C zapisać liczbę binarną należy dodać prefiks 0b. Możemy wykorzystać liczby binarne, aby wpisać dane w rejestr, ponieważ rejestry interpretuje się za pomocą bitów. Zapis za pomocą liczby dziesiętnej Aby to zrobić musimy przeliczyć liczbę binarną na dziesiętną. Bardziej doświadczeni programiści pewnie będą to w stanie zrobić szybko w głowie a) 0b00001001(2) = 00001001(2) = 1001(2) = 9(10) DDRB = 9; b) 0b10110001(2) = 10110001(2) = 177(10) PORTB = 177; Ten zapis może być nieczytelny, ale jest jeden wyjątek, gdzie warto go stosować. Jeżeli chcemy zapełnić jedynkami cały rejestr, to można wpisać do niego wartość 255, ponieważ 255(10) = 11111111(2). Oczywiście można skorzystać z innych systemów liczbowych, np. hex (0xFF(16) = 255(10)) Jeżeli chcesz dowiedzieć się o zastosowaniu rejestrów, to zapraszam do kursu STM32L4. 5) Sterowniki PLC Używa się je w maszynach przemysłowych i do sterowania liniami produkcyjnymi - ogólnie w przemyśle. Gwarantują one stabilność i ciągłość procesu a ponadto spełniają szereg przepisów. Dzięki nim można projektować układy sterowania dyskretnego, czyli procesy przemysłowe, które działają w logice dwuwartościowej. Przykłady maszyn, którymi sterują sterowniki PLC: windy, prasy hydrauliczne, schody ruchome, układ świateł na skrzyżowaniu. Te układy mogą charakteryzować się binarnością, tzn. do ich działania nie muszą być wykorzystywane elementy, które na swoim wejściu/wyjściu otrzymują/zwracają coś innego niż logiczne 0/1. W algorytmach sterowania takimi obiektami stosuje się operatory logiczne typu: AND, OR, XOR… co potwierdza zastosowanie liczb binarnych i logiki binarnej w tych sterownikach. Podsumowanie System binarny stanowi fundament technologii, elektroniki i informatyki. Jest nie tylko teoretycznym konceptem, ale także praktycznym elementem współczesności. Jego znaczenie sięga od konstrukcji tranzystorów przez układy cyfrowe, aż po programowanie mikrokontrolerów i sterowanie maszynami przemysłowymi. System binarny stanowi nieodłączną część świata, stanowiąc podstawę dla licznych innowacji i osiągnięć technologicznych. Każdy informatyk, elektronik, inżynier powinien się z nim zapoznać i zrobić przynajmniej jedno ćwiczenie z konwersji liczby dziesiętnej na binarną







- 1 odpowiedź
-
- 6
-
-
- programowanie
- Elektronika
- (i 2 więcej)
-
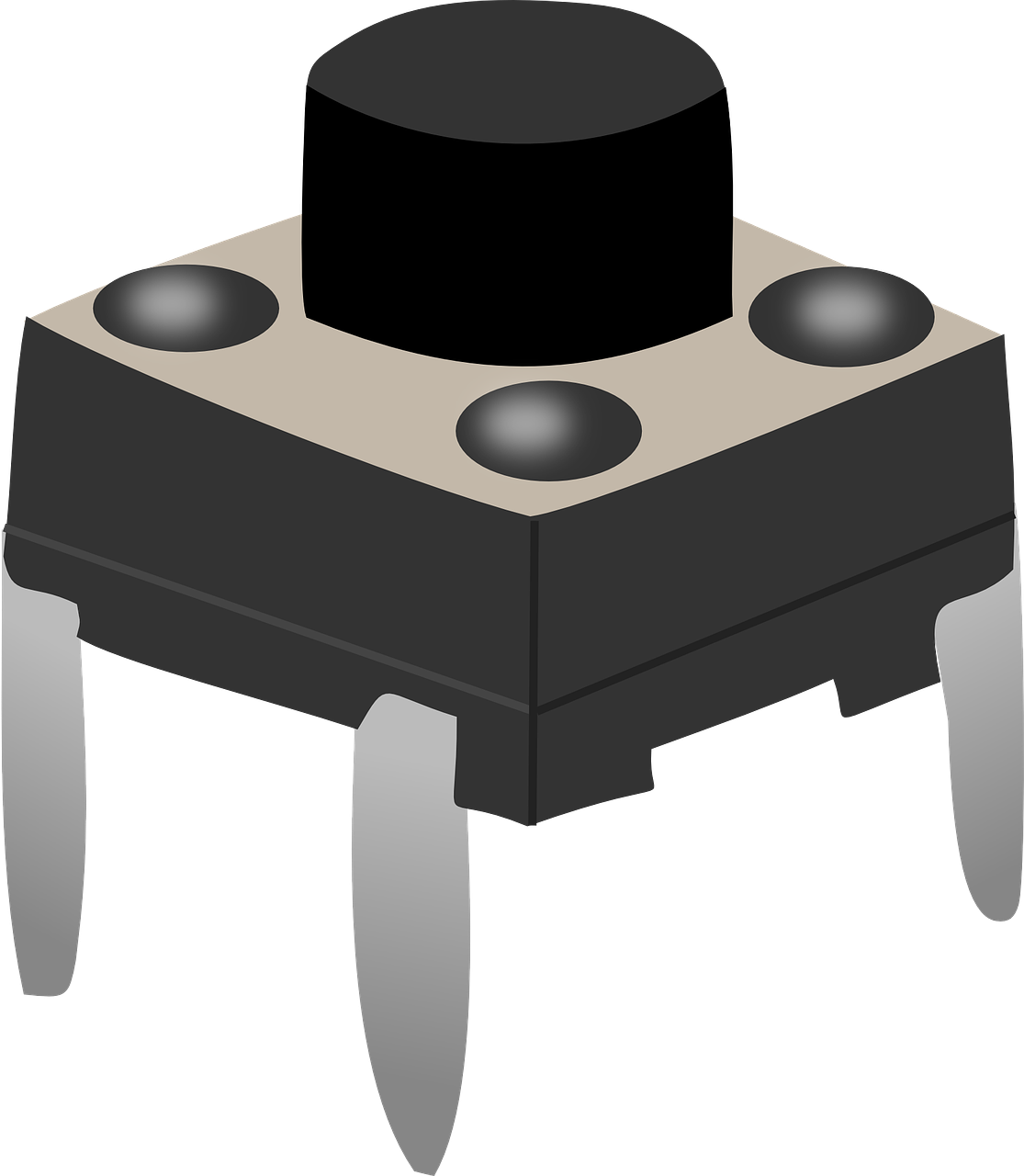
Cześć, myślę nad projektem elektronicznej szachownicy, która będzie identyfikować jaka figura stoi na polu. Wiem, że jest już podobny temat na forum, jednak założeniem tamtego projektu było, aby elektroniczna szachownica nie różniła się niczym od tej tradycyjnej, żadne wiercenie czy coś nie wchodziło w grę. Mój projekt nie ma takiego ograniczenia i zastanawiam się czy następujące rozwiązanie ma jakiś sens: figury i pionki będą miały pod spodem diody o różnej barwie, a każde pole będzie posiadać czujnik koloru, który w ten sposób ma zidentyfikować naszą bierkę. Nie miałem co prawda do tej pory styczności z czujnikami koloru i nie wiem czy to w ten sposób zadziała, stąd moje pytanie do Was. Myślicie, że ma to rację bytu? Czy sugerujecie jakieś inne rozwiązanie?
-
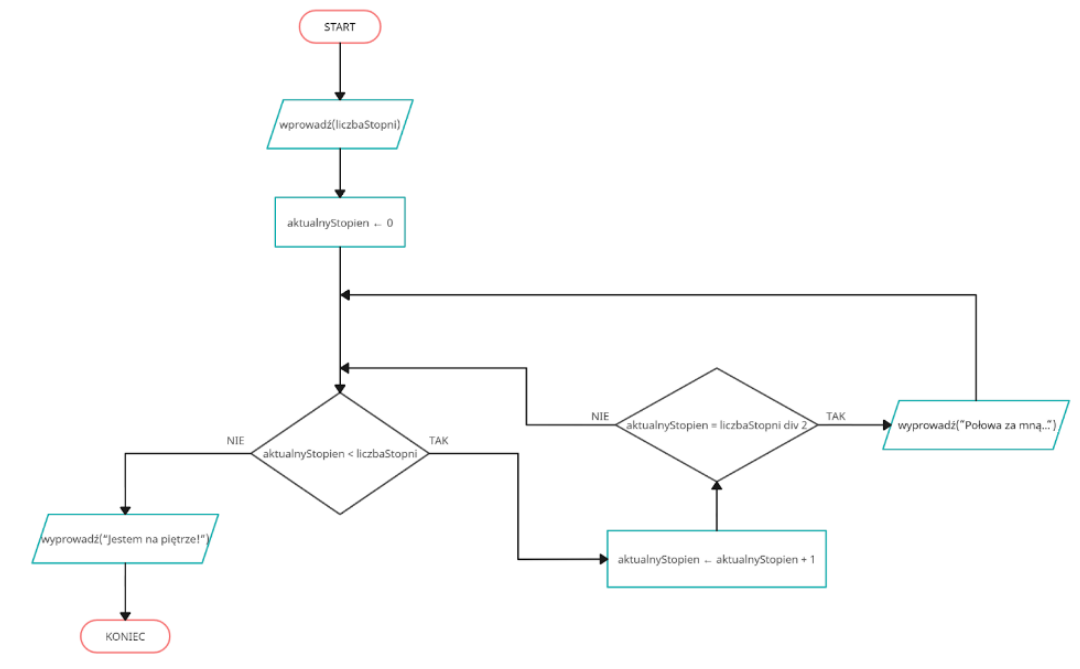
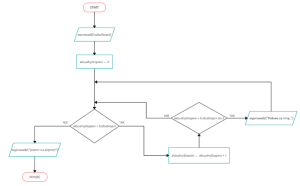
Czego dowiesz się z tego artykułu? Każdy to robi, natomiast prawie nikt nie zwraca na to uwagi. Nawet czytając ten tekst, organizm czytelnika wykonuje ściśle określoną listę kroków, która pozwala mu na zrozumienie czytanego tekstu. Algorytm to uporządkowany zbiór zadań, które wykonuje się w celu rozwiązania problemu. Czytając poniższy tekst zrozumiesz, że algorytmy są związane z praktycznie wszystkim co robisz na co dzień. Wprowadzę Cię do zapisu algorytmów. W artykule przedstawiono również 2 proste algorytmy zapisane w formie programu dla Arduino. Algorytmy w codziennym życiu. Załóżmy, że chcielibyśmy upiec ciasto, tak jak robiła to nasza babcia, która kierowała się konkretnym przepisem. Zaglądamy do jej zeszytu i czytamy, że potrzebujemy jajka, mąkę, masło i inne składniki. Pierwszym krokiem jest pokrojenie masła. Drugi to dodanie mąki, proszku do pieczenia, cukru i masła do miski. Po kolejnych 10 krokach wyciągamy pyszne ciasto z piekarnika i po ostygnięciu delektujemy się nim. Postępujemy tutaj według jasno określonej listy zadań, którą wymyśliła nasza babcia i dzięki której możemy osiągnąć pożądany cel. Po zjedzeniu ciasta wychodzimy na spotkanie z naszym znajomym. Nasz kolega mieszka na 1 piętrze, a winda nie działa, więc kierujemy się na schody. Wchodzimy na pierwszy stopień i weryfikujemy, czy jesteśmy na 1. piętrze. Jeżeli nie, to wchodzimy o 1 stopień wyżej i powtarzamy to, dopóki nie znajdziemy się na docelowym piętrze. W tym przypadku nasze postępowanie jest wyrażone za pomocą powtarzających się czynności, które kończymy, gdy założony przez nas warunek się spełni. Oczywiście w takich sytuacjach postępujemy automatycznie, ale warto było o tym wspomnieć, bo są to życiowe przykłady algorytmów - przepisów, które prowadzą do rozwiązania problemu, np. upieczenia ciasta, lub wejścia na 1. piętro. Mówimy o algorytmie, gdy jest on: poprawny - działa, jednoznaczny - daje ten sam wynik przy takich samych danych, skończony - nie działa w nieskończoność, efektywny - wykonuje się w sensownym czasie. Trzeba pamiętać, że algorytm ≠ program. Jeżeli algorytm jest zapisany językiem programowania, to wtedy możemy mówić o programie. Zapis algorytmów i przykłady Pamiętaj, że bardzo złym pomysłem jest zapisywanie algorytmów jako jakąś opowieść, bo może to zaburzać interpretację ich działania. Dobrym zwyczajem jest zapisywanie ich technikami, które zostały przedstawione poniżej. Lista kroków Najprostszą i najbardziej naturalną techniką jest zapis algorytmu w postaci ponumerowanych punktów, w których wypisujemy po kolei, co robimy. Zależnie od sytuacji, kroki można pomijać lub do nich wracać. Uproszczony algorytm wykonania ciasta. Autor nie ponosi odpowiedzialności za korzystanie z tego przepisu! pokrój 100 g zimnego masła na małe kosteczki dodaj do miski: 200 g szklanki mąki, pokrojone masło, 13 g proszku do pieczenia, 26 g cukru i rozbite jajko bez skorupki zmieszaj porządnie zawartość miski ciasto włóż do lodówki po 15 minutach wyciągnij ciasto piekarnik nagrzej do 180 stopni Celsjusza wypełnij formę ciastem i dodaj owoce włóż do piekarnika blachę z ciastem na 50 minut sprawdź czy gotowe. Jeżeli tak to przejdź do kroku 12. W przeciwnym razie przejdź do kroku 10 poczekaj minutę przejdź do kroku 9 wyjmij ciasto i daj mu ostygnąć zakończ algorytm Powyższy algorytm jest uproszczeniem. Bezmyślne kierowanie się nim może skutkować tym. Jesteśmy ludźmi i raczej każdy rozumie zwrot dodaj cukier. Algorytm wchodzenia po schodach: sprawdź czy wszedłeś na docelowe piętro. Jeżeli tak, to przejdź do kroku 4. W przeciwnym razie przejdź do następnego kroku wejdź o jeden stopień do góry przejdź do kroku 1 zakończ algorytm W powyższych algorytmach pojawiają się instrukcje warunkowe (jeżeli) i pętle (jeżeli… przejdź do kroku poprzedniego) - jedne z najważniejszych zagadnień programowania. Instrukcją warunkową nazywamy fragment programu, który praktycznie odpowiada na pytanie w formie: tak/nie, prawda/fałsz, 1/0. Na podstawie odpowiedzi może wykonywać jakąś czynność. Pętla to fragment kodu, który powtarza się, jeżeli warunek przypisany do tej pętli jest spełniony. W kolejnych przykładach będę posługiwał się tylko algorytmem wchodzenia po schodach, bo jest on krótki i wystarczy do wyjaśnienia innych technik zapisywania algorytmów. Pseudokod Jak sama nazwa wskazuje, jest to symbolicznie zapisany kod, który w dużej mierze zachowuje zasady języków programowania. W tym artykule wykorzystamy zasady, które opisano w tym dokumencie. Należy pamiętać, że nie istnieje oficjalny standard dla pseudokodu i to jest tylko szkolny przykład. Operacje matematyczne dodawanie – + odejmowanie – - mnożenie – • dzielenie – / dzielenie całkowite – div reszta z dzielenia – mod Przypisanie wartości do zmiennej a ← 3 Instrukcja warunkowa jeżeli a = 3 wykonuj a ← 0 w przeciwnym razie a ← 1 Operatory porównania większe - > większe równe - ≥ mniejsze - < mniejsze równe - ≤ równe - = nierówne - ≠ Operatory logiczne AND - i OR - lub Pętle dopóki a < 10 wykonuj a ← a + 1 lub dla i = 1, 2, 3, … 10 wykonuj a ← a + 1 lub wykonuj a ← a + 1 dopóki a < 10 Przedstawmy teraz algorytm wchodzenia po schodach w postaci pseudokodu. Musimy założyć pewne uproszczenia i dodatki: z góry wiemy ile dane schody mają stopni wejście na stopień traktujemy jako dodanie 1 do zmiennej wskazującej aktualny stopień gdy będziemy na środkowym stopniu to powiemy “połowa za mną…” po wejściu na piętro jesteśmy bardzo szczęśliwi, że nasz algorytm działa, więc mówimy “jestem na piętrze!” wprowadź liczbaStopni aktualnyStopien ← 0 dopóki aktualnyStopien < liczbaStopni wykonuj aktualnyStopien ← aktualnyStopien + 1 jeżeli aktualnyStopien = liczbaStopni div 2 wypisz “Połowa za mną…” wypisz “Jestem na piętrze!” Zapisując algorytm w pseudokodzie, pamiętaj, żeby stosować wcięcia do operacji, które dotyczą użytej wcześniej instrukcji, takiej jak instrukcja warunkowa. Zapewni to czytelność i poprawne działanie kodu, ponieważ pseudokod bazuje na wcięciach. Pseudokod zapewnia szybki zapis algorytmu i możliwość łatwego przekonwertowania go na język programowania. Schemat blokowy W tej technice używamy bloków o konkretnym kształcie, aby wskazać różne instrukcje algorytmu. Podstawowe kształty: owal - miejsce rozpoczęcia/zakończenia algorytmu prostokąt - operacje na zmiennych romb - instrukcja warunkowa równoległobok - wprowadzenie/wypisanie danych I tak jak poprzednio, algorytm wchodzenia po schodach: Dla czytelności polecam wejść w pełny obraz. Schemat blokowy czyta się od punktu START i podąża się zgodnie ze strzałkami, wykonując wszystkie operacje zawarte w mijanych blokach. Spróbuj przeanalizować powyższy algorytm! Dzięki schematowi blokowemu będziesz mógł przedstawić swoje algorytmiczne pomysły w czytelny i klarowny sposób. Należy pamiętać, że schemat blokowy dobrze sprawdza się w algorytmach mniejszych rozmiarów. Spróbuj sobie wyobrazić, co by było, gdyby na schemacie znajdowało się 100 różnych bloków i byłoby między nimi dużo połączeń… Język programowania Wcześniejsze techniki zapisu algorytmów są stosowane do ich przedstawienia w sposób symboliczny. Komputer to maszyna i potrzebuje konkretnych instrukcji, dlatego stosuje się języki programowania, które są jednoznaczne i precyzyjne. Mówiąc chcę dodać dwie liczby trzeba jeszcze sprecyzować, jakie mają wartości, jakiego są typu, gdzie będzie przechowywany wynik itp. Każdy język charakteryzuje się składnią i semantyką, czyli sposobem, w jaki programy napisane w danym języku są konstruowane i interpretowane przez komputer. Składnia odnosi się do struktury i zapisu gramatycznego kodu, czyli do tego, jakie konstrukcje i polecenia są akceptowane w danym języku. Z kolei semantyka odnosi się do znaczenia tych konstrukcji oraz sposobu, w jaki są one rozumiane i wykonane przez interpreter lub kompilator. Poniżej znajduje się zapis algorytmu wchodzenia po schodach w języku C. #include <stdio.h> int main() { int iloscStopni = 10; int aktualnyStopien = 0; while (aktualnyStopien < iloscStopni) { aktualnyStopien = aktualnyStopien + 1; if (aktualnyStopien == iloscStopni / 2) { printf("Polowa za mna!\n"); } } printf("Jestem na pietrze!\n"); return 0; } Tutaj warto zaznaczyć jak korzysta się z funkcji. Nazwę możesz kojarzyć z matematyki, gdzie występuje funkcja f(x). Dokładnie w ten sam sposób działają funkcje w programowaniu. Wywołując ją podajesz jej nazwę i w nawiasach argumenty, które zostaną wykorzystane do pewnych operacji. Funkcja może zwracać pewną wartość lub nie. Np. funkcja printf() nic nie zwraca, ale wypisuje napis w konsoli. Jeżeli zwraca to musimy podać zmienną przechowującą wartość wyniku. Na początku programu musimy pobrać bibliotekę, w której znajdują się funkcje, których będziemy używali w programie. Za to odpowiada pierwsza linijka - #include <stdio.h>. W C operacje pisze się między nawiasami klamrowymi, które oznaczają początek i koniec danej instrukcji. W tym przypadku cały program jest zapisany w funkcji głównej main(), która zawsze się wykonuje przy uruchomieniu programu. Na końcu każdej operacji musi wystąpić średnik! Żeby nie komplikować kodu pobraniem wartości założyłem, że wiemy od samego początku, ile jest stopni na schodach, dlatego równocześnie z deklaracją, że będzie to zmienna stałoprzecinkowa int, przypisujemy jej wartość 10: int iloscStopni = 10;. while() to pętla odpowiadająca pętli dopóki w pseudokodzie. W nawiasach wpisujemy warunek wykonania się kolejnego kroku pętli. Funkcja printf() wyświetla napis zawarty w nawiasach, w cudzysłowie. Porównaj kod zapisany pseudokodem z tym w C. Jestem pewny, że dostrzeżesz podobieństwa. Algorytmika w Arduino Należy pamiętać, że programy, które piszemy na Arduino, działają w nieskończonej pętli. Procesory, mikrokontrolery i inne sterowniki są projektowane tak, aby mogły działać cały czas. Z tego powodu programy w Arduino wykonują się w dwóch funkcjach - setup() i loop(). Dodatkowo warto zaznaczyć, że język wykorzystywany w Arduino IDE jest praktycznie językiem programowania C++. setup() wykonuje się tylko i wyłącznie raz przy starcie całego programu. Używamy tej funkcji, żeby rozpocząć pewne procesy lub ustawić wejścia i wyjścia na odpowiednie tryby. Stąd jej nazwa, która przetłumaczona na j. polski brzmi konfiguracja. Konfigurujemy i przygotowujemy środowisko na późniejsze etapy wykonywania programu. loop() wykonuje się po zakończeniu funkcji setup i działa w pętli - wykonuje się cały czas. Tutaj umieszczamy operacje związane z np. sterowaniem i przechwytywaniem informacji. Przykładowe algorytmy na Arduino Blink Na początku zajmiemy się miganiem diodą LED. Nie musisz nic pisać, aby skorzystać z tego programu! Włącz Arduino IDE -> kliknij zakładkę File -> Examples -> 01.Basics -> Blink. Otworzy się nowe okienko z programem Blink. Zauważysz dużo komentarzy, które są poprzedzone dwoma myślnikami, lub znakami /* i zakończone */. Możesz je usunąć. Zostanie poniższy kod: void setup() { pinMode(LED_BUILTIN, OUTPUT); } void loop() { digitalWrite(LED_BUILTIN, HIGH); delay(1000); digitalWrite(LED_BUILTIN, LOW); delay(1000); } pinMode() ustawia wybrany pin na wejście lub wyjście. Przyjmuje dwa argumenty - numer pinu i wybranie trybu. Arduino ma wbudowaną stałą, która wskazuje na pin wbudowanej w płytkę diody, więc to będzie nasz pierwszy argument. Drugim będzie OUTPUT, czyli ustawienie pinu na wyjście. Ta funkcja wykona się tylko raz, bo znajduje się w setup(). W funkcji loop() jako pierwszy krok ustawiamy pin LEDa na stan wysoki (zapali się) funkcją digitalWrite(), podając pin tej diody i argument HIGH oznaczający stan wysoki. Funkcja delay() powoduje czekanie programu. Wartość w nawiasach to długość czasu w milisekundach. Potem wyłączamy diodę, czekamy sekundę. Funkcja loop() wykonuje się od nowa. Czy jesteś w stanie zapisać algorytm migania diodą w postaci schematu blokowego? Czytanie przycisku Poniżej znajduje się program do zapalania lampki, gdy wciśnięty jest przycisk na pinie 7. Spróbuj go przeanalizować i pochwal się w komentarzu, jak działa! Dodatkowo w ramach ćwiczenia, polecam zapisać go w postaci pseudokodu. Kilka podpowiedzi: zmienne i stałe można deklarować poza głównymi funkcjami. Można wtedy się do nich odwołać w każdym miejscu w programie #define oznacza deklarację stałej, której nie zmienia się przez cały program. Symbolicznie stałe zapisuje się wielkimi literami digitalRead() czyta i zwraca stan, który aktualnie jest na pinie funkcja else() wykonuje się wtedy, gdy instrukcja warunkowa zwróciła fałsz #define PIN_LED 8 #define PIN_BUTTON 7 int buttonState = 0; void setup() { pinMode(PIN_LED, OUTPUT); pinMode(PIN_BUTTON, INPUT); } void loop() { buttonState = digitalRead(PIN_BUTTON); if (buttonState == HIGH) { digitalWrite(PIN_LED, HIGH); } else { digitalWrite(PIN_LED, LOW); } } Podsumowanie Znajomość pojęcia algorytm to kluczowa umiejętność w świecie programowania. Jeśli zaczynasz pisać kod na platformę Arduino, to warto zgłębić tę tematykę. Nie ograniczaj się tylko do zapisu algorytmów - zrozum, jak działają i jak możesz je wykorzystać w praktyce. Gorąco polecam skorzystać z kursu Arduino na Forbocie, abyś mógł szybko przekuć swoją wiedzę na konkretne projekty.




- 8 odpowiedzi
-
- 8
-
-

-
- programowanie
- nauka
- (i 1 więcej)
-
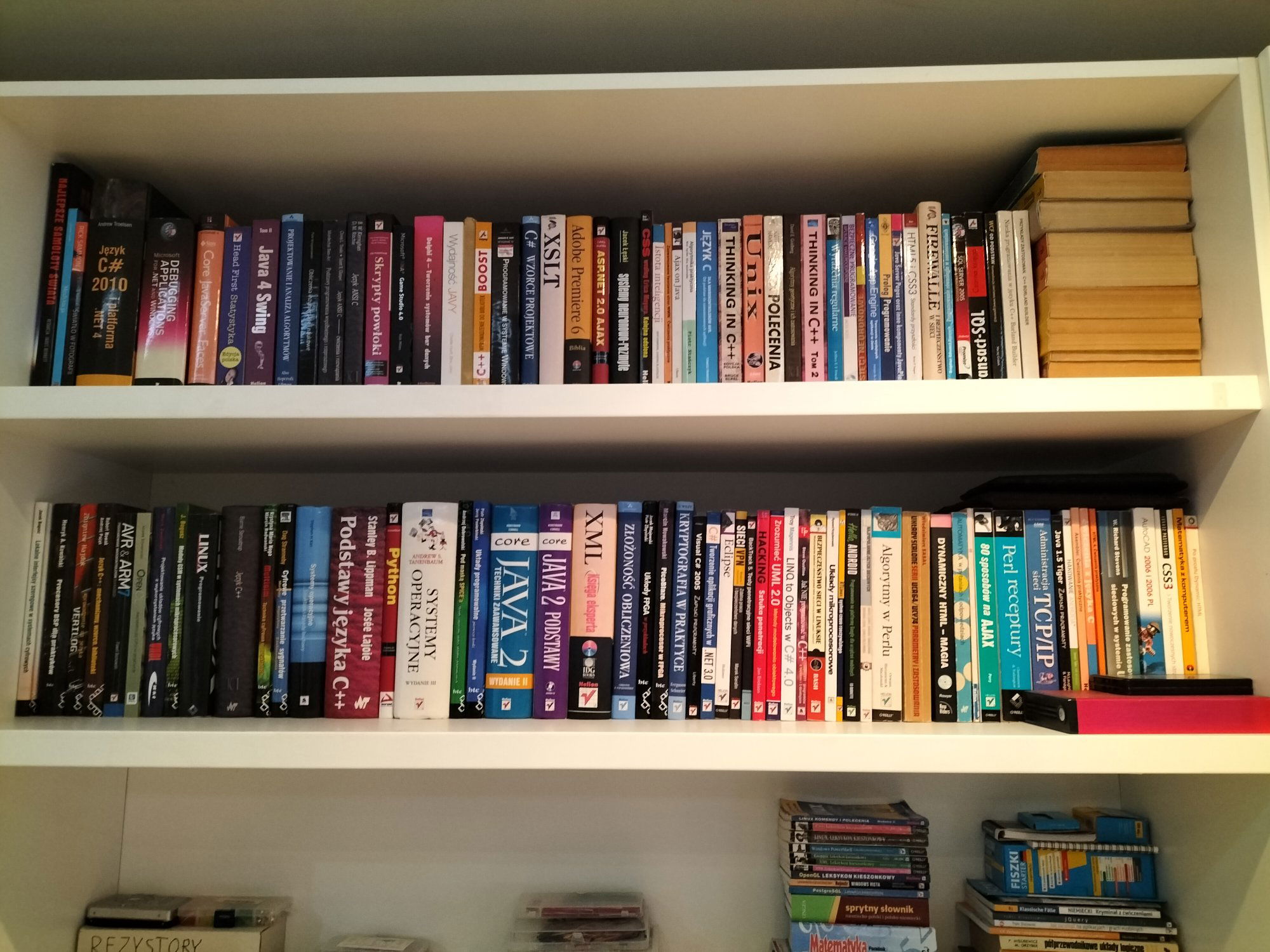
 Cześć, oferuję do sprzedaży dużą kolekcję książek papierowych z zakresu programowania i informatyki. Coraz rzadziej z nich korzystam bo dużą część tej wiedzy "mam w głowie". Polecam osobom, które dopiero chcą się nauczyć danych zagadnień. Nie wymienię wszystkich tytułów, bo po prostu jest ich za dużo - proszę pytać o dane zagadnienie, a odpowiem jakie mam pozycje. Główne kategorie: 1) Programowanie w językach C/C++ 2) Języka Java - programowanie oraz wiele innych zagadnień 3) PHP +HTML4 4) Język prog. Perl 5) Seci TCP/IP + firewall+bezpiec zeństwo 6) Hacking i Reverse Engineering 7) Excel+ office 8 )Język C# + .NET 9) XML +XSLT 10) programowanie gier - kilka tytułów 11) programowanie OpenGL 10) elektronika - np. programowania MCU AVR w C++ 11) UML + projektowanie obiektowe Uwaga! - nie sprzedaję ksiązek dot. OS Linux lub Unix. Tutaj zdjęcie tej kolekcji: Wszystkie ceny do negocjacji (postaram się, aby były konkurencyjne). Koszty wysyłki ponosi kupujący. Pozdrawiam
Cześć, oferuję do sprzedaży dużą kolekcję książek papierowych z zakresu programowania i informatyki. Coraz rzadziej z nich korzystam bo dużą część tej wiedzy "mam w głowie". Polecam osobom, które dopiero chcą się nauczyć danych zagadnień. Nie wymienię wszystkich tytułów, bo po prostu jest ich za dużo - proszę pytać o dane zagadnienie, a odpowiem jakie mam pozycje. Główne kategorie: 1) Programowanie w językach C/C++ 2) Języka Java - programowanie oraz wiele innych zagadnień 3) PHP +HTML4 4) Język prog. Perl 5) Seci TCP/IP + firewall+bezpiec zeństwo 6) Hacking i Reverse Engineering 7) Excel+ office 8 )Język C# + .NET 9) XML +XSLT 10) programowanie gier - kilka tytułów 11) programowanie OpenGL 10) elektronika - np. programowania MCU AVR w C++ 11) UML + projektowanie obiektowe Uwaga! - nie sprzedaję ksiązek dot. OS Linux lub Unix. Tutaj zdjęcie tej kolekcji: Wszystkie ceny do negocjacji (postaram się, aby były konkurencyjne). Koszty wysyłki ponosi kupujący. Pozdrawiam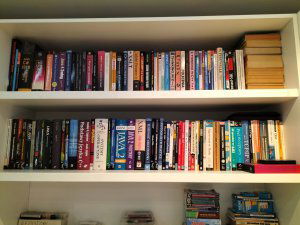

-
- 1
-
-
- ksiązki
- programowanie
- (i 1 więcej)
-
Napisz program HTML z wyglądem wiersza poleceń, który będzie mógł być przełączany pomiędzy wyglądem zielonego systemu Linux, Windows 11, Windows 3.1, Mac OS oraz Raspberry Pi. Musisz zmienić wygląd, znak zachęty, tło i obramowanie oraz kolor, aby miał on wygląd aplikacji. Pole tekstowe także musi się znaleźć. Po wpisaniu w nie tekstu powinien znikać tekst. Dodatkowo, musisz dodać pasek 'X', '_' i 'zmień rozmiar', ale pamiętaj, że wygląd, znak zachęty, kolor, obramowanie i pole tekstowe nie mogą się powtarzać!
-
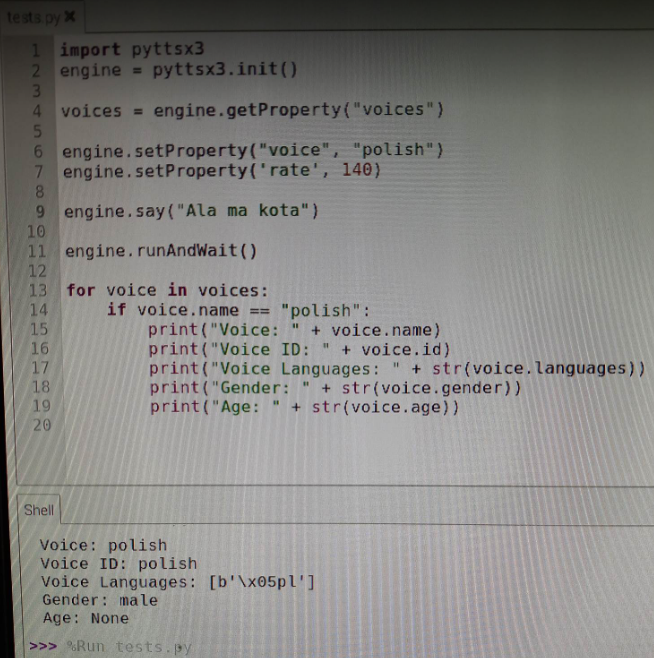
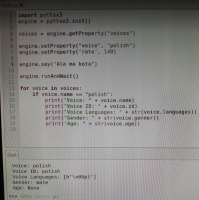
Dzień dobry, Chciałbym się zapytać czy istnieje na urządzeniu Raspberry Pi 3B+ polski lektor(męski) ?- Python, biblioteka: pyttsx3. Szukam już po internecie od dłuższego czasu i na nic nie mogę trafić. Id polskiego głosu jaki pokazuje mi program brzmi "polish" jednak po wybraniu go brzmi on dość mało "polsko". Chciałbym się dowiedzieć czy ten głos po prostu taki jest, czy ja coś robię nie tak. Jeśli istnieje jakiś inny sposób dodania polskiego głosy do maliny to prosiłbym o podpowiedź gdzie i jak mogę go znaleźć. (Sorki za jakoś zdjęcia, ale zależy mi na czasie)
-
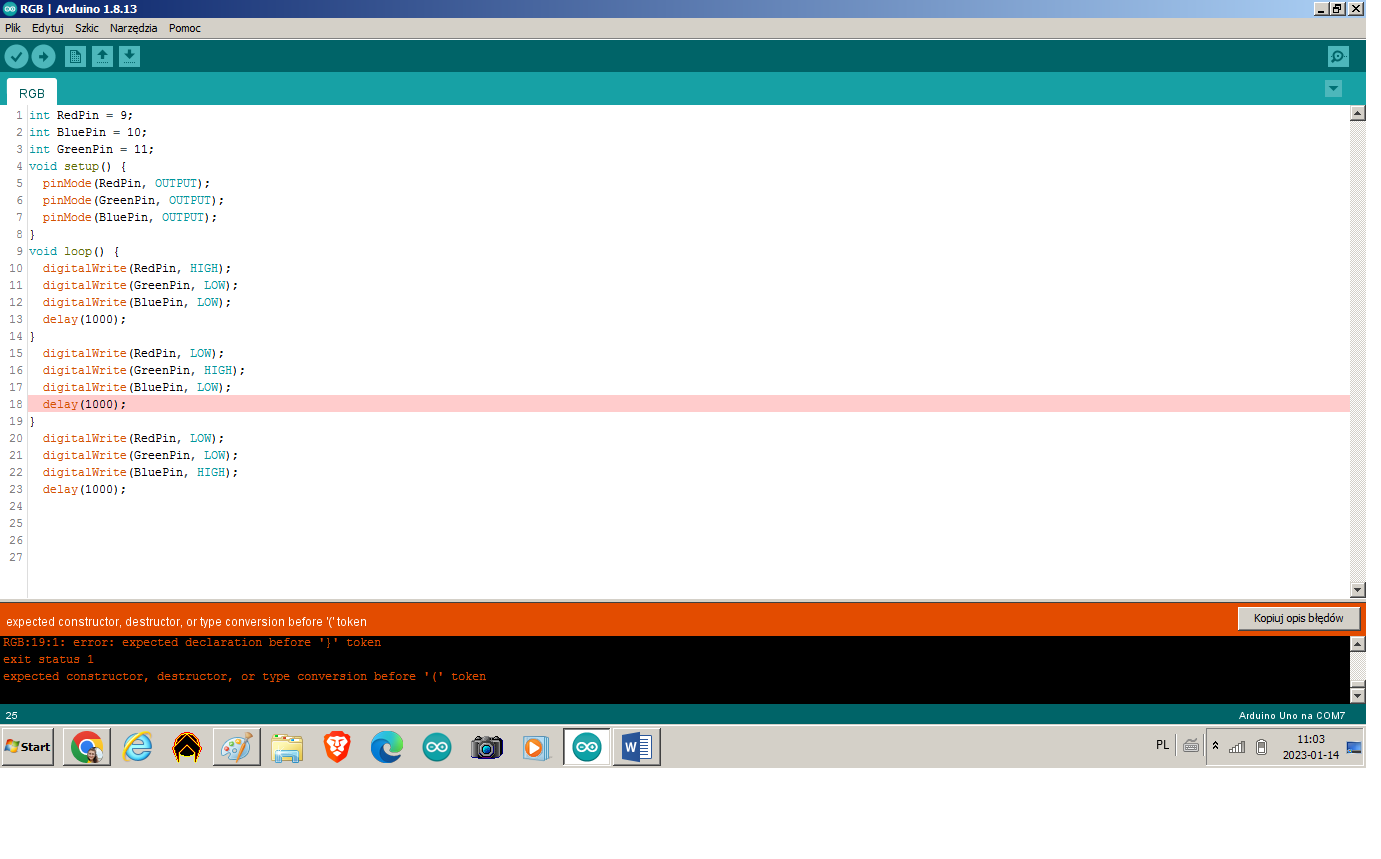
Dzień dobry nazywam się Antek dostałem w prezencie książkę ,,Arduino dla dzieci". Próbuję wykonywać przykłady z książki, ale program ,,Arduino" ciągle wyrzuca mi błędy. Prosił bym o pomoc w zweryfikowaniu problemu poniżej przesyłam przykład kodu jaki napisałem. Z góry dziękuje za pomoc. int RedPin = 9; int BluePin = 10; int GreenPin = 11; void setup() { pinMode(RedPin, OUTPUT); pinMode(GreenPin, OUTPUT); pinMode(BluePin, OUTPUT); } void loop() { digitalWrite(RedPin, HIGH); digitalWrite(GreenPin, LOW); digitalWrite(BluePin, LOW); delay(1000); } digitalWrite(RedPin, LOW); digitalWrite(GreenPin, HIGH); digitalWrite(BluePin, LOW); delay(1000); } digitalWrite(RedPin, LOW); digitalWrite(GreenPin, LOW); digitalWrite(BluePin, HIGH); delay(1000); digitalWrite(RedPin, HIGH); digitalWrite(GreenPin, HIGH); digitalWrite(BluePin, HIGH); delay(1000); digitalWrite(RedPin, HIGH); digitalWrite(GreenPin, LOW); digitalWrite(BluePin, HIGH); delay(1000); digitalWrite(RedPin, HIGH); digitalWrite(GreenPin, HIGH); digitalWrite(BluePin, LOW); delay(1000); digitalWrite(RedPin, LOW); digitalWrite(GreenPin, HIGH); digitalWrite(BluePin, HIGH); delay(1000);
-
Cześć! Zapraszam wszystkie osoby, którym nie straszna jest analiza danych, #BigData, #MachineLearning czy #SztucznaInteligencja do udziału w #hackathonie CuValley Hack 2023 - III edycja Kiedy? 27-29 stycznia 2023 Gdzie? Online Jak? Zupełnie za darmo! Co na Was czeka? 3 zadania i pula nagród w wysokości 120 000 PLN! 40 godzin kodowania i networking na Slacku analiza danych, #AI, #MachineLearning, #BigData webinary, Keynote Speakerzy, porządna dawka wiedzy i inspiracji! Zarejestruj się już dzisiaj, aby otrzymać atrakcyjny prezent powitalny: https://cuvalley.com/

-
Dzień Dobry, Chciałbym nauczyć się podstaw assemblera. Mam tutaj na myśli strukturę języka (dyrektywy, sekcje programu itp.) - inaczej mówiąc, zagadnienia niezależne od architektury docelowej. Wiedzę chciałbym najbardziej wykorzystać przy pracowaniu z układami AVR i ARM. Korzystając z zasobów internetu trafiłem na wiele "tutoriali", jednak wszystkie z nich były wg mnie niedopracowane - wiele terminów było omawianych powierzchownie albo wcale, jakby autorzy z góry zakładali, że każdy te terminy zna. Tak więc, jeśli ktoś może zasugerować przystępną, w miarę aktualną lekturę, byłbym wdzięczny za jej link/tytuł.
-
Cześć. Postanowiłem zamieścić tu przykład kodu w ramach podzielenia się swoja "twórczością". Jeśli zły dział, proszę przenieść. Post głównie w celach edukacyjnych dla osób, które jeszcze nie miały okazje zrezygnować z miliona zmiennych Pin_1, Pin_2 itd. Dużo przyjemniej i czytelniej jest mieć wszystko skompresowane do obiektów, nawet jeśli to bedzie przerost formy nad treścią. Po prostu sam chciałbym coś takiego przeczytać rok-dwa temu Swego czasu, gdy trochę więcej poświęcałem czasu na embedded, natrafiłem na jednym z kursów M. Salamona fajną (według mnie) metodę implementacji obsługi przycisku. Postanowiłem sobie ją trochę przerobić, gdyż oryginał był pisany pod C i używał callbacków, które średnio mi dobrze pasowały, bo za każdym razem napotykałem rozmaite problemy, z którymi średnio sobie umiałem poradzić. Napisałem więc sobie to jako klasę, a kolejno dopisałem drugą klasę, która dziedziczy po niej, a jednocześnie implementuje to co dzieje się po wciśnięciu tego przycisku. Jest to taki chyba najprostszy przykład zastosowania programowania obiektowego dla arduino. Zamieszczam Link do GitHub z plikami .h i .cpp. gdyż wstawienie tu całego kodu byłoby trochę przesadą? Celem w ogóle użycia dziedziczenia było zrobienie swoistej "templatki" dla klasy, która implementuje obsługę przycisku, ale nie definiuje tego co dzieje się po wciśnięciu tego przycisku. Zapewne 80% przycisków w projektach po prostu wystawia jakiś stan na konkretny Pin, więc można było darować sobie to dziedziczenie, no ale.. zrobiłem sobie to głównie pod siebie na przyszłość. W temacie programowania obiektowego jestem początkujący więc wszelakie uwagi od bardziej doświadczonych kolegów mile widziane, bo niestety ale wszystko to moje własne próby sklejenia czegoś z informacji, które zdobyłem. Opisując skromnie co dzieje się w implementacji i jakie są założenia: 1. Brak możliwości stworzenia podstawowej klasy // virtual destructor virtual ~TypeButton() = 0; // virtual methods virtual void ButtonPressed() = 0; virtual void ButtonNotPressed() = 0; Chciałem stworzyć sobie klasę, która będzie miała zaimplementowaną swoista "blokade", żeby nie kusiło stworzenia obiektu, który nie posiada implementacji dla funkcji obsługującej przycisk. W tym celu zmieniłem destruktor na wirtualny i przypisałem mu 0. W ten sposób ustawiłem destruktor czysto wirtualny, czyli taki którego nie można wywołać. Co za tym idzie, nie można również stworzyć obiektu. 2. Funkcje Pressed i NotPressed są wykonywane raz Funkcje wykonywane są raz tylko przy zmianie stanów z Debbounce -> Pressed i z Pressed-> Idle. Zabezpieczało mnie to przed wchodzeniem ciągle, w funkcje, która ustawia stan na wysoki/niski. 3. Działanie głównie opiera się na sprawdzaniu w pętli metody ButtonTask() void TypeButton::ButtonTask() { switch (this->State) { case IDLE: ButtonIdle(); break; case DEBBOUNCE: ButtonDebbounce(); break; case PRESSED: ButtonIsPressed(); break; default: break; } } Metoda za każdym razem sprawdza aktualny stan obiektu, z którego została wywoływana (this->State) i wykonuje funkcje, zależnie od tego w jakim stanie znajduje się aktualnie przycisk. 4. Opierając się na Klasie-rodzic można dorabiać dalej własne implementacje klasy-dziecka, które bedą wykonywać inne zadania. Kwestia inwencji własnej. Ogólnie, jak wspomniałem wcześniej wygląda to jak przerost formy nad treścią, ale obecnie bardzo mi ułatwia pisanie prototypów bo nie musze znowu martwić czy dobrze napisałem kod do przycisku. No i było bardzo fajną lekcją w kontekście robienia klas/metod wirtualnych. Z napotkanych problemów: Mimo, że zaimplementowałem destruktor jako pure virtual to i tak musiałem dodać w pliku .cpp na początku: TypeButton::~TypeButton(){} Bez tego dostawałem ciągłe błedy o tym, że w klasie-dziecko jest nieznany typ destruktora własnie TypeButton::~TypeButton(). Trochę nie mogłem zrozumieć czemu musiałem to zrobić. Wygrzebałem to w jednym z tematów na Stack Overflow i było to tam opisane czymś w rodzaju "Czasem trzeba dodać tego typu deklaracje mimo pure virutal destruktora". Albo ja nie uważałem podczas uczenia się, ale rzadko kiedy widziałem by ktoś miał taki problem. Może ktoś dużo mądrzejszy mi to wytłumaczy? To by było na tyle. Wszelakie uwagi mile widziane
-

Visual Studio problem z instalacją pakietów NuGet dla linux pod rpi
Mati294 opublikował temat w Programowanie
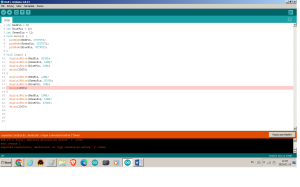
Witam próbuje poustawiać sobie wszystko do programowania i mam problem z instalacją pakietów NuGet w visual studio bo wyskakuje następujący błąd. "Błąd Nie można zainstalować pakietu „System.Device.Gpio 2.1.0”. Próbujesz zainstalować ten pakiet w projekcie, którego celem jest „native,Version=v0.0”, ale pakiet nie zawiera żadnych odwołań zestawu ani plików zawartości zgodnych z tą strukturą. Aby uzyskać więcej informacji, skontaktuj się z autorem pakietu." Nie bardzo wiem co mam z tym zrobić a w internecie nie widze nic sensownego na ten temat. -
Witam, szukam dodatku/programu pozwalającego na ustawienie okienek w visual studio tak jak to wygląda w windows forms ale działającego na linuxe. W skrócie program ma komunikować sie przez modbus z arduino a te dane chce chce wyświetlić na monitorze i mieć klikalne przyciski i tym podobne. Ewentualnie jakieś inne rozwiązanie okienkowe chociaż najlepszy był by program klikalny najlepiej darmowy
-
Cześć, zastanawiam się na programowanie stm32 Blackpill. Póki co mam napisany program pod Nucleo-f7 i chciałbym teraz przenieść ten projekt na Blackpill ale niestety nie mogę znaleźć żadnych informacji na ten temat. Znalazłem jedynie informację przez Arduino ale nie chciałbym też pisać programu od początku. Czy jest na to jakiś dobry sprawdzony sposób?
-
 Zapraszamy do współpracy osoby, posiadające doświadczenie w pracy z Arduino, pasjonujące się nowoczesnymi technologiami i lubiącymi pracę z dziećmi. Robocode to młoda, progresywna firmą, oferująca szkolenia dla dzieci i młodzieży w wieku od 8 do 16 lat w zakresie robotyki, programowania i myślenia projektowego W związku z otwarciem pierwszej w Katowicach szkoły poszukujemy nauczycieli/instruktorów zajęć, pragnących rozwijać ją razem z nami! Nauczyciel w Robocode odpowiada za: Przeprowadzanie zajęć w interesujący i zrozumiały sposób, Znalezienie wspólnego języka z dziećmi, Śledzenie trendów innowacji w IT, Bieżącą współpracę z menedżerem szkoły i zespołem. Instruktor Robocode jest ekspertem, przyjacielem i mentorem, więc jeśli czujesz, że chodzi o Ciebie, jeśli lubisz dzielić się wiedzą oraz jesteś aktywną, dobrze zorganizowaną i nastawioną na rozwój osobą, dołącz do nas! Zapewniamy niezbędne materiały oraz szkolenia dla efektywnej pracy i rozwoju Twoich kompetencji, proponujemy system podwyższenia stawki początkowej. Wymiar pracy dostosowany jest do Twojej dyspozycyjności. Brzmi interesująco? A w rzeczywistości wygląda jeszcze ciekawiej! Osoby zainteresowane prosimy o przesłanie CV z aktualną klauzulą RODO oraz kilku zdań o sobie na adres [email protected]. Więcej o nas przeczytać można na stronie robocode.pl. Czekamy na Ciebie w naszym super zespole!
Zapraszamy do współpracy osoby, posiadające doświadczenie w pracy z Arduino, pasjonujące się nowoczesnymi technologiami i lubiącymi pracę z dziećmi. Robocode to młoda, progresywna firmą, oferująca szkolenia dla dzieci i młodzieży w wieku od 8 do 16 lat w zakresie robotyki, programowania i myślenia projektowego W związku z otwarciem pierwszej w Katowicach szkoły poszukujemy nauczycieli/instruktorów zajęć, pragnących rozwijać ją razem z nami! Nauczyciel w Robocode odpowiada za: Przeprowadzanie zajęć w interesujący i zrozumiały sposób, Znalezienie wspólnego języka z dziećmi, Śledzenie trendów innowacji w IT, Bieżącą współpracę z menedżerem szkoły i zespołem. Instruktor Robocode jest ekspertem, przyjacielem i mentorem, więc jeśli czujesz, że chodzi o Ciebie, jeśli lubisz dzielić się wiedzą oraz jesteś aktywną, dobrze zorganizowaną i nastawioną na rozwój osobą, dołącz do nas! Zapewniamy niezbędne materiały oraz szkolenia dla efektywnej pracy i rozwoju Twoich kompetencji, proponujemy system podwyższenia stawki początkowej. Wymiar pracy dostosowany jest do Twojej dyspozycyjności. Brzmi interesująco? A w rzeczywistości wygląda jeszcze ciekawiej! Osoby zainteresowane prosimy o przesłanie CV z aktualną klauzulą RODO oraz kilku zdań o sobie na adres [email protected]. Więcej o nas przeczytać można na stronie robocode.pl. Czekamy na Ciebie w naszym super zespole!-
- 1
-
-
- Praca
- Arduino Uno
- (i 3 więcej)
-
Słowem wstępu Niniejszy poradnik jest przeznaczony dla osób, które nie miały dotąd styczności z programowaniem aplikacji wizualno-obiektowych przy użyciu języka C# oraz platformy .NET (czytane jako dotnet). Skupimy się tu na podstawach języka oraz na tym, jak krok po kroku napisać wybrane aplikacje. Na początek trochę teorii Język C# jest odpowiedzą firmy Microsoft na obiektowy język Java. Struktura obu języków jest podobna, a więc osoba programująca do tej pory w Javie szybko będzie mogła stosować w C# znane już sobie mechanizmy. Platforma .NET pozwala na pisanie programów nie tylko w C#, ale także w F#, C++, Visual Basic'u, Pythonie, HTML-u, Javascript’cie czy Node.js - .NET zakłada, że wszystkie języki programowania są równe, jednak to, że Microsoft stworzył język C# oraz platformę .NET sprawiło, że programowanie w tym środowisku przy użyciu języka C# jest najbardziej wydajne. C# oraz platforma .NET pozwala także na pisanie aplikacji sieciowych, jednak ten temat nie zostanie tutaj poruszony. Ten artykuł bierze udział w naszym konkursie! Na zwycięzców czekają karty podarunkowe Allegro, m.in.: 2000 zł, 1000 zł i 500 zł. Potrafisz napisać podobny poradnik? Opublikuj go na forum i zgłoś się do konkursu! Czekamy na ciekawe teksty związane z elektroniką i programowaniem. Sprawdź szczegóły » Podstawowa wiedza Zakładam, że część osób czytająca ten poradnik miała już w swoim życiu styczność z jakimś językiem programowania wysokiego poziomu, mimo to zachęcam do zapoznania się z tą częścią poradnika, a także wracania do niej w razie potrzeb. Informacje na temat środowiska oraz zapoznania się z nim będą w oddzielnej części, przeznaczonej tworzeniu aplikacji wizualno-obiektowej. Osobom, które nie wiedzą jednak czym jest język wysokiego poziomu spróbuję wyjaśnić za pomocą skrótu myślowego i odpowiedniego rysunku: W dużym skrócie: istnieją języki wysokiego i niskiego poziomu. Język wysokiego poziomu to ten zrozumiały dla człowieka, mający postać zmiennych, ich nazw, pętli, instrukcji warunkowych itd. Natomiast język niskiego poziomu to ten najbliższy komputerowi, mający postać zer i jedynek, operacji na pamięci itd. Dawno temu ludzie programowali maszyny za pomocą kart perforowanych z wyciętymi dziurami. Było to swoistym językiem niskiego poziomu, dochodziło do błędów i było nieprzystępne dla ludzi. To właśnie było powodem powstania języków wysokiego poziomu oraz kompilatorów/interpreterów tłumaczących je na kod maszynowy. Język C# pozwala nam pracować z poniższymi typami danych byte – przyjmuje wartości od 0 do 255 char – znaki w Unicode bool – prawda / fałsz sbyte – wartości od -128 do 127 short – wartości od -32,765 do 32,767 ushort – wartości od 0 65,535 int – wartości od -2,147,483,648 do 2,147,483,647 uint – wartości od 0 do 4,294,967,295 long – wartości od 18,446,744,073,709,551,615 ulong – wartości od 0 do 18,446,744,073,709,551,615 float – wartości od -3.402823e38 do 3.402823e38 double – wartości od -1.79769313486232e308 do 1.79769313486232e308 decimal – wartości +/- od 1.0 x 10e-28 do 7.9 x 10e28 string – sekwencja znaków Unicode DateTime – format daty i czasu (0:00:00am 1/1/01 do 11:59:59pm 12/31/9999) Oprócz tych typów danych są także typy skalarne enum oraz struct, jednak ich temat nie będzie teraz rozwijany. W wymienionych powyżej typach danych, niektóre posiadają przedrostek u- i oznacza on, że typ jest unsigned czyli nieprzypisany. To z kolei oznacza, że wartości ujemne zostały przeniesione na plus w celu zwiększenia pojemności typu. Środowisko programistyczne W tej części zajmiemy się pobieraniem środowiska oraz jego wstępną konfiguracją. Pobieranie środowiska Środowisko, w którym będziemy programować to Visual Studio Community 2019 i można je pobrać na stronie https://visualstudio.microsoft.com/pl/vs/community/, to środowisko jest darmowe. Wejdź pod podany przed chwilą adres, pobierz instalator i uruchom go na swoim komputerze. Instalacja środowiska jest prosta, więc poruszymy tylko niektóre aspekty z nią związane. Ekran instalatora Visual Studio Installer W tym poradniku potrzebne będzie nam pobranie dodatku Programowanie aplikacji klasycznych dla platformy .NET, znajduje się on w części Komputery i urządzenia przenośne. Instalator powinien sam zaznaczyć wymagane pakiety opcjonalne, jednak dla pewności sprawdź, czy w prawym okienku Szczegóły instalacji są zaznaczone opcje jak na powyższym zdjęciu. W przyszłości oczywiście możesz doinstalować kolejne pakiety przy użyciu programu, który instaluje się razem z Visual Studio (jest to Visual Studio Installer), jednak teraz potrzebne nam będą tylko te domyślnie zaznaczone. Po zaznaczeniu wciskamy przycisk Instaluj znajdujący się w prawym dolnym rogu. Po instalacji może być wymagane zalogowania się do konta Microsoft. Tworzenie projektu Po uruchomieniu Środowiska wybieramy opcję Utwórz nowy projekt. Ekran użytkownika po uruchomieniu środowiska Najpierw skupimy się na aplikacji konsolowej. Znajdź szablon "Aplikacja Konsolowa", upewnij się że wybrana opcja ma tag C# Nadajmy projektowi nazwę np. Hello World. W informacjach dodatkowych na razie nic nie zmieniamy. Wybieramy Utwórz i naszym oczom powinno pokazać się środowisko, w którym będziemy pracować. Domyślnie wygenerowana aplikacja konsolowa będzie miała już napisany kod programu Hello World, skupimy się więc na jego analizie oraz dodatkowych informacjach, które mogą się przydać. using System; namespace Hello_World { class Program { static void Main(string[] args) { Console.WriteLine("Hello World!"); } } } Na początek zaczniemy od funkcji Main. Znajdująca się w niej metoda WriteLine może odstraszać początkującego programistę, jednak spokojnie. Pracujemy z aplikacją konsolową, a co za tym idzie, jeśli chcemy wypisać coś w konsoli, musimy odwołać się do metody wypisz linie (WriteLine). Metoda ta należy do klasy konsola (Console). Metody oraz klasy można zrozumieć skrótem myślowym, w tym wypadku będzie to Konsola wypisz linie „Hello World!” class Program (klasa Program) jest klasą wygenerowaną, więc możemy napisać dla niej metodę, do której później będziemy mogli się odwołać, podobnie jak przy użyciu Console.WriteLine(); namespace Hello_World może wyglądać znajomo osobom, które pisały już w C++, gdzie dla ułatwienia stosowały using namespace std; w C# namespace deklaruje zakres (proste wytłumaczenie, czym jest zakres znajdzie się na końcu poradnika) jednak ten temat rozwiniemy za chwilę przy użyciu przykładu. W celu zademonstrowania i ułatwienia zrozumienia wiedzy zdobytej do tej pory, napisałem poniższy kod: using System; namespace Hello_World { class Klasa_HelloWorld { public static void Hello() { Console.WriteLine("Hello World!"); } } } namespace wypisywanie { class Klasa_Wypisywanie { static void Main(string[] args) { Hello_World.Klasa_HelloWorld.Hello(); } } } Aby uruchomić program klikamy przycisk oznaczony zielonym trójkątem Działanie kodu wygląda następująco: Wyjaśnię więc, co dzieje się po uruchomieniu programu. Funkcja Main znajdująca się w klasie Wypisywanie z namespace wypisywanie ma w sobie odwołanie do Metody Hello() klasy o nazwie Klasa_HelloWorld zakresu Hello_World. Sama klasa metoda jest publiczna (public static void). Z kolei metoda Hello() nie należy to klasy, w której jest wywoływana, jednak modyfikator dostępu public pozwala na jej wykorzystanie. Instrukcje wejścia/wyjścia Zanim przejdziemy dalej, trzeba wspomnieć o tym jak wyglądają instrukcje wejścia/wyjścia w C#. namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { String input = Console.ReadLine(); Console.WriteLine(input); } } } Dwa podstawowe polecenia wejścia i wyjścia to Console.ReadLine() oraz znane nam już Console.WriteLine(), w tym wypadku utworzyłem zmienną input, która jest ciągiem znaków (String) i przekazałem programowi, że zawiera w sobie to, co użytkownik wpisze w konsoli. Wykonywanie działań w języku C# Jak pewnie się domyślasz, w języku C# można wykonywać działania arytmetyczne, operatory arytmetyczne. Wyniki ich działań pokazuje poniższy kod. namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { double a = 10; double b = 4; Console.WriteLine(a + b); //dodawanie wynikiem będzie 14 Console.WriteLine(a - b); //odejmowanie wynikiem będzie 6 Console.WriteLine(a * b); //mnożenie wynikiem będzie 40 Console.WriteLine(a / b); //dzielenie wynikiem będzie 2,5 Console.WriteLine(a % b); //reszta z dzielenie wynikiem będzie 2 } } } Dla ułatwienia przekazu posłużyłem się zdefiniowanymi wartościami a oraz b, by w komentarzu (czym jest komentarz, wyjaśnię na końcu poradnika) pokazać przykładowe wyniki działań. W swoim kodzie możesz oczywiście wpisywać te zmienne przy użyciu polecenia Console.ReadLine(). Instrukcje warunkowe Pierwszą instrukcją warunkową, której działaniu się przyjrzymy jest if. Instrukcja warunkowa if przyjmuje jeden argument i wykonuje odpowiedni kod, jeśli argument jest spełniony. Warto także wspomnieć o słowie kluczowym else, które wykonuje inny kod, jeśli warunek nie został spełniony. Z połączenia obu tych poleceń wychodzi else if, który pozwala na doprecyzowanie kolejnego warunku. namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { String input = Console.ReadLine(); if(input == "hello") { Console.WriteLine("Hello World!"); } else if (input == "poradnik") { Console.WriteLine("Witamy w poradniku programowania w C#"); } else { Console.WriteLine("podano błędną wartość"); } } } } Powyższy kod sprawdza, czy użytkownik wpisał w konsoli słowo hello lub poradnik, i wykonuje odpowiednie polecenia. Jeśli zaś użytkownik wpisał coś innego, kod wyświetli komunikat o podaniu błędnej wartości. Drugą instrukcją warunkową, którą poznamy jest switch. Słowa kluczowe switch oraz case działają na podobnej (lecz nie identycznej) zasadzie co if i else. Różnica polega na wygodzie pisania oraz czasie wykonywania instrukcji (nie będzie tu poruszana szczegółowa analiza różnic w działaniu obu instrukcji). namespace Hello_World { class Program { static void Main(string[] args) { String input = Console.WriteLine(); switch (input) { case "hello": Console.WriteLine("Hello World!"); break; case "poradnik": Console.WriteLine("Poradnik programowania w C#"); break; default: Console.WriteLine("podano błędną wartość"); break; } } } } Powyższy kod działa identycznie jak ten z wykorzystaniem if oraz else. Słowo kluczowe break przerywa działanie funkcji oraz pętli. Pętle w języku C# Teraz spróbujmy wypisać w konsoli napis „Hello World!” 10 razy, można oczywiście w tym celu skopiować fragment kodu odpowiedzialny za to 10 razy. Jednak co w wypadku, gdy stwierdzimy, że 10 razy to za mało? Wtedy kopiowanie kodu nie ma sensu. Do uproszczenia tego procesu posłużą nam pętle. Osobom, które są już zapoznane z pętlami, ten fragment nie wniesie nic nowego, można więc go pominąć. Osobom, które chcą sobie powtórzyć lub nie wiedzą nic o pętlach warto powiedzieć że istnieją cztery różne pętle: for foreach while do while Pętla for namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { for(int i = 0; i<10; i++) { Console.WriteLine( i + " Hello World!"); } } } } Pętla for przyjmuję trzy argumenty, na obrazku są to kolejno: int i = 0 - ten argument wykonuje się tylko raz na początku wykonywania pętli; jest to zmienna, z którą pętla rozpoczyna swoje działanie; i<10 - to warunek pętli, w tym wypadku pętla będzie się wykonywała tak długo, aż wartość zdefiniowanej przed chwilą zmiennej będzie mniejsza od 10; i++ - to inkrementacja zmiennej czyli podniesienie jej wartości o 1 z każdym wykonaniem pętli. Pętla foreach namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { int[] tablica = { 1, 2, 3, 4, 5, 6, 7, 8, 9, 10}; foreach(int i in tablica) { Console.WriteLine( i + " Hello World!"); } } } } Pętla foreach wykonuje się dla każdego elementu tablicy. W tym wypadku zdefiniowałem tablicę liczb całkowitych int[], jako tablicę zawierającą 10 elementów. Pętla foreach przyjmuje dwa argumenty w tym wypadku int i inny, będący dowolnym elementem tablicy oraz in tablica, będący wskazaniem tablicy. While i do while namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { int i = 0; while (i < 10) { Console.Write(i + " Hello World!"); i++; } } } } Pętla while przyjmuje jeden warunek i będzie się wykonywać do momentu, kiedy warunek zostanie spełniony. namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { int i = 0; do { Console.Write(i + " Hello World!"); i++; }while (i < 10); } } } Pętla do while jest podobna do pętlu while, z tym że wykona się przynajmniej raz, niezależnie od prawdziwości warunku. namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { int i = 11; do { Console.Write(i + " Hello World!"); i++; }while (i < 10); } } Na powyższym obrazku widać, że do while wykonało się raz, mimo iż warunek nie jest spełniony. Ćwiczenie Przy użyciu zdobytej wiedzy spróbuj napisać prosty kalkulator obsługujący działania na dwóch liczbach. Wskazówka do Ćwiczenia W razie problemów z pisaniem postaraj się wyobrazić sobie albo narysować schemat działania twojego programu. Czy ma najpierw wypisać komunikat i oczekiwać na wybranie danego działania? Ma poprosić o podanie liczb na których ma operować, czy w inny sposób ma poprowadzić użytkownika do wykonania działania? Pierwsza aplikacja wizualno-obiektowa W tej części poradnika zajmiemy się pisaniem twojej pierwszej aplikacji z interfejsem użytkownika. Na początku skoncentrujemy się na potrzebnych nam elementach środowiska i podstawowych kontrolkach, które będziemy wykorzystywać, potem zajmiemy się pisaniem prostego kalkulatora. Tworzenie nowego projektu W tej części poradnika dalej będziemy pracować ze środowiskiem Visual Studio Community. W poprzedniej części zainstalowaliśmy wszystkie potrzebne nam elementy tego środowiska, które będą nam potrzebne podczas tworzenia projektu. Po uruchomieniu Visual Studio wybieramy opcję „Utwórz nowy projekt”. Następnie z listy wybieramy „Aplikacja Windows Forms”, jeśli masz problem ze znalezieniem odpowiedniej opcji, możesz wpisać ją w wyszukiwarce szablonów. Klikamy „Dalej” i nadajemy naszemu projektowi odpowiednią nazwę. Po nadaniu nazwy i kliknięciu „Dalej” pojawi się okienko proszące nas o wybranie wersji .NET, z którą chcemy pracować. W tym poradniku pracujemy z .NET Core 3.1. Po upewnieniu się, że wybraliśmy odpowiednią opcję, klikamy „Utwórz”. Po utworzeniu projektu pokaże nam się takie okno. Znajduje się na nim puste okienko aplikacji, którą teraz tworzymy. Możemy uruchomić projekt w taki sam sposób jak robiliśmy to z aplikacją konsolową. Klikamy nazwę naszego projektu, która jest obok zielonej strzałki i po chwili pojawi nam się takie same okienko jak w środowisku. Możemy to okienko zamknąć w taki sam sposób jak inne aplikacje komputerowe - krzyżykiem znajdującym się w prawym górnym rogu. Jednak lepiej zamykać projekt z poziomu środowiska, ponieważ przy bardziej rozbudowanych projektach zamknięcie okienka nie musi oznaczać końca działania aplikacji. Znajdź czerwony kwadrat w w górnej części środowiska, będzie w tym samym miejscu, co przycisk odpowiedzialny za uruchomienie aplikacji. Czerwony kwadrat zatrzyma działanie aplikacji, opcję po lewej i prawej stronie czerwonego kwadratu odpowiadają kolejno za wstrzymanie działania programu oraz za ponowne uruchomienie. Potrzebne informacje o środowisku Teraz skupimy się na elementach środowiska, których będziemy potrzebować. Po lewej stronie będzie zwinięty pasek o nazwie Przybornik. Na górze listy Przybornika znajduje się wyszukiwarka, pozwala w szybki sposób znaleźć potrzebne nam elementy interfejsu. Skupimy się teraz na kontrolce „Button” oraz „TextBox”. Na powyższych zdjęciach znajdują się potrzebne nam kontrolki znalezione przy użyciu wyszukiwarki. Po znalezieniu odpowiednich kontrolek przeciągamy je na obszar roboczy. W związku z tym, że w poradniku zajmujemy się pisaniem aplikacji „Kalkulator”, potrzebne nam będzie 16 przycisków (10 numerycznych i 6 funkcyjnych) oraz jeden TextBox do wyświetlania wyniku. Dla ułatwienia sobie pracy, po przeciągnięciu pierwszego przycisku ustaw jego wymiary na takie, które chcesz mieć w projekcie końcowym. Późniejsza zmiana rozmiarów wielu elementów może być czasochłonna i nieprzyjemna. Aby zmienić rozmiar przycisku kliknij go i rozciągnij używając charakterystycznych punktów, które się pojawią. Gdy już nadasz kontrolce odpowiednie wymiary, możesz ją skopiować skrótem klawiszowym ctrl + c i wkleić kolejne przyciski o tych samych wymiarach. Wymiary kontrolki TextBox zmienia się w identyczny sposób, jednak jeśli chcesz ustawić jej wysokość, musisz wybrać opcję MultiLine klikając kolejno trójkącik nad wybranym TextBox’em, a następnie opcję MultiLine. Po dodaniu wszystkich potrzebnych kontrolek, moja propozycja wyglądu aplikacji prezentuje się następująco: Po napisaniu kodu aplikacja byłaby funkcjonalna, jednak jej wygląd oraz podpisy nie są przyjazne użytkownikowi, dlatego aby to zmienić, możemy dostosować wszystkie elementy interfejsu. Po wybraniu dowolnego elementu w prawym dolnym rogu środowiska pojawią nam się właściwości, które dla tego elementu możemy zmienić. Zachęcam do samodzielnego zapoznania się ze wszystkimi elementami, dlatego teraz skupmy się tylko na podstawowych, które będą nam potrzebne. Na początek zmienimy nazwę przycisku oraz tekst, jaki jest w nim wyświetlany. By zmienić nazwę w segmencie Design zmienimy właściwość (Name) na liczba_7 oraz w segmencie Wygląd właściwość text na 7. Możemy tez dostosować wygląd, zmieniając właściwości z segmentu Widok, takie jak BackColor (kolor tła), BorderSize z listy FlatApperance (grubość ramki wokół przycisku) oraz FlatStyle (ogólny wygląd przycisku. Zachęcam do samodzielnej zabawy tymi ustawieniami i zobaczenia jak wpływają na wygląd kontrolki. W ten sam sposób możesz również zmienić ustawienia okienka klikając na nie i zmieniając np. kolor tła albo rodzaj ramki. Teraz zmienimy ustawienia TextBox’a. Zmień właściwość Text na przykładowy ciąg liczb, TextAlign na Right oraz rozmiar czcionki właściwością Font, dostosuj czcionkę do rozmiaru kontrolki (pamiętaj, żeby usunąć wybrany przez siebie ciąg liczb po dobraniu satysfakcjonujących ustawień czcionki) . Zaproponowany przeze mnie wygląd aplikacji jest teraz taki: Teraz dodajmy naszemu kalkulatorowi kod, by zapewnić mu pewną funkcjonalność. Po podwójnym kliknięciu na kontrolkę, środowisko wygeneruje nam fragment kodu odpowiedzialny za wykonanie poleceń mających miejsce po kliknięciu przycisku w programie. Kliknij dwukrotnie na wszystkie przyciski. using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.Threading.Tasks; using System.Windows.Forms; namespace WinFormsApp1 { public partial class Form1 : Form { public Form1() { InitializeComponent(); } private void liczba_1_Click(object sender, EventArgs e) { } } } Na powyższym obrazku widać wygenerowany kod. Zauważ, że funkcja void przyjmuje nazwy takie jak nazwy kontrolek, które przed chwilą stworzyłeś. W programie potrzebne będą nam trzy zmienne globalne: jedna przechowująca znak działania, jedna przechowująca wynik i jedna zmienna kontrolna. Double wynik = 0; //wynik działania String operacja = ""; //zmienna przechowująca znak działania bool czyPrzeprowadzaOperacje = false; //zmienna kontrolna do sprawdzania czy można przeprowadzić operacje Żeby móc wykonywać działania, potrzebne będą nam liczby. W tym celu dla każdej kontrolki w kodzie musimy przypisać wartość liczbową. private void liczba_7_Click(object sender, EventArgs e) { czyPrzeprowadzaOperacje = false; Button przycisk = (Button)sender; textBox1.Text = textBox1.Text + przycisk.Text; } Powyższy kod zadziała dla każdej kontrolki, można by go użyć nawet bez wklejania do każdej funkcji _Click, jednak dla ułatwienia skupimy się na prostszej wersji. Zanim wkleisz kod do wszystkich funkcji, wyjaśnię ci, w jaki sposób on działa. Na samym początku zmienna czyPrzeprowadzaOperacje jest ustawiona na fałsz. Użyjemy tej zmiennej, żeby upewnić się, że kod będzie działał dokładnie tak jak tego chcemy. Kolejna linijka “Button button = (Button)sender” na niewtajemniczonych robi wrażenie, jednak jest to bardzo proste. Ta linijka tworzy nowy obiekt typu Button o nazwie przycisk, zaś (Button)sender w uproszczeniu tworzy nadawcę. Cała funkcja należy do przycisku 7, który jest nadawcą, więc ta linijka sprawia, że nasz przycisk może „odebrać” informacje sam od siebie. Ostatnia linijka jest łatwa do zrozumienia. Chcemy przypisać tekst dla pola tekstowego i, aby to zrobić, wywołujemy Text z textBox1, a następnie przypisujemy mu tekst zawarty w przycisku (w tym wypadku jest to 7). Teraz możesz skopiować ten kod dla innych liczb. Nie martw się, nic złego się nie stanie . Jak już skopiujesz ten kod w odpowiednie miejsca, uruchom program i upewnij się, że wszystkie liczby wyświetlają się poprawnie. Następnie potrzebny nam będzie kod sprawdzający, jaka operacja została wybrana. private void dzielenie_Click(object sender, EventArgs e) { Button button = (Button)sender; if (wynik != 0) { rownosc.PerformClick(); operacja = button.Text; czyPrzeprowadzaOperacje = true; } else { operacja = button.Text; wynik = Double.Parse(textBox1.Text); textBox1.Text = " "; czyPrzeprowadzaOperacje = true; } } Pozwoli na to powyższy kod. Podobnie jak poprzednio, ten sam kod możesz zastosować dla każdego przycisku osobno. Zanim jednak go powklejasz tam gdzie trzeba - trochę wyjaśnień. Zajmę się rzeczami, które wykorzystujemy po raz pierwszy. Linijka rownosc.PerformClick() ta linijka odwołuje się do kontrolni o nazwie rownosc, a PerformClick() to metoda, która wykona kod w przycisku równości bez jego kliknięcia. Stanie się tak, tylko jeśli wynik będzie różny od zera. Linijka wynik = Double.Parse(textBox1.Text) przypisze zmiennej wynik wartość z textbox1 nie możemy tego jednak zrobić bezpośrednio, w tym celu użyjemy metody Parse by zmienić string zawierający ciąg liczbowy na typ Double. Niezależnie od spełnienia instrukcji warunkowej if, zmieniamy zmienną czyPrzeprowadzaOperację naprawdę. Teraz potrzebna nam funkcja, która wykonuje obliczenia. private void rownosc_Click(object sender, EventArgs e) { switch (operacja) { case "+": textBox1.Text = (wynik + Double.Parse(textBox1.Text)).ToString(); break; case "-": textBox1.Text = (wynik - Double.Parse(textBox1.Text)).ToString(); break; case "*": textBox1.Text = (wynik * Double.Parse(textBox1.Text)).ToString(); break; case "/": textBox1.Text = (wynik / Double.Parse(textBox1.Text)).ToString(); break; default: break; } wynik = Double.Parse(textBox1.Text); } Powyższy kod wykorzystuje instrukcję switch case w celu sprawdzenia jaką operację chcemy wykonać. Jeśli spełnimy jeden z warunków, wtedy wykona się odpowiednie działanie. Skupimy się teraz na tym, co nowe. W każdej instrukcji case możesz zauważyć metodę ToString(), w tym wypadku używamy jej, żeby wyświetlić wynik obliczeń w textBox’ie. Zauważ, że wykonujemy obliczenia na typach liczbowych, których nie możemy bezpośrednio wyświetlić, właśnie dlatego używamy metody ToString(). Na koniec zostało nam tylko zajęcie się przyciskiem CE. Dla zapewnienia jego funkcjonalności wykorzystamy poniższy kod. private void CE_Click(object sender, EventArgs e) { textBox1.Text = " "; wynik = 0; } Dodatkowe objaśnienia pojęć, które wystąpiły w poradniku Zakres – dla ułatwienia przekazu posłużymy się przykładem static void Main(string[] args) { //to jest zmienna x z tego zakresu int x = 3; } void InnaFunkcja() { //to jest zmienna x z tego zakresu String x = "Hello"; } W powyższym fragmencie kodu znajdują się dwie funkcje, każda z tych funkcji jest ograniczona przez „agrafki” (otwarcia „{„ oraz zamknięcia „}”) te agrafki są zakresem tej funkcji, co sprawia, że wszystko co się w nim znajduje, jest widziane tylko w tym zakresie i nie jest dostępne poza nim. Komentarz – w języki C# możemy „zakomentować” fragmenty kodu, oznacza to, że kompilator nie będzie brał tego fragmentu pod uwagę przy kompilowaniu naszego kodu. Istnieją dwa rodzaje komentarza: jednoliniowy oraz wieloliniowy, pokazane na poniższym obrazku: static void Main(string[] args) { //to jest komentarz jednoliniowy /** to jest komentarz wieloliniowy */ } Praca domowa Chciałbym, abyś po ukończeniu tego poradnika samodzielnie zapoznał się z właściwościami kontrolek i zmieniał ich wygląd. Postaraj się także dodać dodatkową funkcjonalność w postaci obsługi liczb dziesiętnych, potęg oraz pierwiastków. Powodzenia .


























- 3 odpowiedzi
-
- 4
-
-
- programowanie
- C#
- (i 3 więcej)
-
 CUDA na kiju (a nawet GPU) cz. 1 Wstęp Tym artykułem chciałbym zapoczątkować cykl artykułów na temat programowania równoległego z wykorzystaniem kart graficznych (GPU) w języku CUDA C. W części pierwszej przedstawię krótki wstęp teoretyczny tzn. omówię dlaczego równoległe wykonywanie obliczeń może istotnie przyspieszyć działanie programu, opiszę budowę procesorów graficznych, a w dalszych częściach będą przedstawione praktyczne wskazówki z fragmentami kodu programu do mnożenia macierzy. Zapraszam do lektury! Treść artykułu została usunięta, ponieważ użytkownik publikujący ten poradnik wykorzystał w nim materiały, do których nie posiadał odpowiednich praw. Usunięcie nastąpiło na prośbę autora zapożyczonych materiałów.
CUDA na kiju (a nawet GPU) cz. 1 Wstęp Tym artykułem chciałbym zapoczątkować cykl artykułów na temat programowania równoległego z wykorzystaniem kart graficznych (GPU) w języku CUDA C. W części pierwszej przedstawię krótki wstęp teoretyczny tzn. omówię dlaczego równoległe wykonywanie obliczeń może istotnie przyspieszyć działanie programu, opiszę budowę procesorów graficznych, a w dalszych częściach będą przedstawione praktyczne wskazówki z fragmentami kodu programu do mnożenia macierzy. Zapraszam do lektury! Treść artykułu została usunięta, ponieważ użytkownik publikujący ten poradnik wykorzystał w nim materiały, do których nie posiadał odpowiednich praw. Usunięcie nastąpiło na prośbę autora zapożyczonych materiałów.
- 2 odpowiedzi
-
- 11
-
-
- programowanie
- C
- (i 3 więcej)
-
CUDA na kiju (a nawet GPU) cz 2. Wstęp W poprzedniej części omówiliśmy sobie dlaczego warto wykorzystać procesory graficzne do obliczeń oraz po krótce zapoznaliśmy się z ich budową. W tej części omówimy sobie wszystko to co należy zrobić przed napisaniem programu: podam kilka informacji przydatnych podczas rozważania programu równoległego, przygotujemy środowisko do pisania programu w CUDA C, a następnie przygotujemy podwaliny pod pierwszy program tzn. opracujemy sobie teorię mnożenia macierzy oraz napiszemy prototyp programu na CPU. Gotowi? No to jazda!!! Treść artykułu została usunięta, ponieważ użytkownik publikujący ten poradnik wykorzystał w nim materiały, do których nie posiadał odpowiednich praw. Usunięcie nastąpiło na prośbę autora zapożyczonych materiałów.

- 8 odpowiedzi
-
- 8
-
-
- konkurs2021
- CUDA C
- (i 3 więcej)
-
Programowanie równoległe w języku CUDA C - #4 - Program GPU v2
Qitr opublikował temat w Artykuły użytkowników
CUDA na kiju (a nawet GPU) cz. 4 Wstęp W trzeciej części serii artykułów CUDA na kiju (a nawet GPU) udało nam się stworzyć nasz pierwszy CUDOwny program mnożący macierze. Program działa poprawnie ale (jeszcze) nie grzeszy szybkością o ile rozmiary problemu nie są olbrzymie. W tym artykule spróbujemy go zatem trochę przyśpieszyć. Do celów testowych powrócimy do rozmiaru macierzy 1021x1021. Treść artykułu została usunięta, ponieważ użytkownik publikujący ten poradnik wykorzystał w nim materiały, do których nie posiadał odpowiednich praw. Usunięcie nastąpiło na prośbę autora zapożyczonych materiałów.
-
- 3
-
-
- programowanie
- CUDA C
- (i 2 więcej)
-
CUDA na kiju (a nawet GPU) cz. 3 Wstęp W części drugiej artykułu stworzyliśmy szkielet programu do mnożenia macierzy oraz prototyp funkcji jądra wykonującej iloczyn skalarny wiersza macierzy A i kolumny macierzy B czyli pojedynczy element macierzy wynikowej C. W tym artykule pójdziemy krok dalej to znaczy wreszcie napiszemy program na GPU. Będzie to od nas wymagało zmian w funkcji matmul, wywołującej jądro oraz wewnątrz samego jądra. Rozpoczniemy od najprostszej wersji programu implementując po prostu to co robił program CPU na procesorze graficznym i z czasem będziemy ją sobie komplikować za każdym razem sprawdzając jakie przyspieszenie względem wersji CPU uzyskaliśmy. Nie ma co już dłużej zwlekać. Lecimy z tematem . Treść artykułu została usunięta, ponieważ użytkownik publikujący ten poradnik wykorzystał w nim materiały, do których nie posiadał odpowiednich praw. Usunięcie nastąpiło na prośbę autora zapożyczonych materiałów.

- 2 odpowiedzi
-
- 5
-
-
- konkurs2021
- CUDA
- (i 3 więcej)