Przeszukaj forum
Pokazywanie wyników dla tagów 'joystick'.
Znaleziono 3 wyniki
-
Witam, Projektuję własne PCB, ale natrafiłem na problem(y). 1. Nie mam pojęcia jak podłączyć joystick do HT12E. 2. Czy dwa procesory HT12E zadziałają na jednym module RF? Jak ktoś wie co i jak prosiłbym o odpowiedź.
-
Cześć, to mój pierwszy post, poza powitalnym. Przechodząc do rzeczy: problem dotyczy zakupionego joysticka (link https://allegro.pl/show_item.php?item=5152872458). Chcę stworzyć sterowany joystickiem samochód, dlatego potrzebuję odczytu analogowego osi joysticka w zakresie 0 - 1023 na Arduino, To udało mi się uzyskać, tzn program odczytuje wartości w tym zakresie. Problem polega na tym, że wartości skrajne 0 lub 1023 (w zależności od strony wychylenia) uzyskuję przy połowie wychylenia joysticka. Czyli przykładowo dla osi Y: gdy joystick jest w naturalnej pozycji środkowej, odczyt wynosi 470. Wraz z (bardzo bardzo!) delikatnym ruszeniem joysticka w górę, wartość ta rośnie stopniowo aż wychylam do połowy możliwego wychylenia i uzyskuję odczyt 1023. Dalsze zwiększanie wychylenia nic nie zmienia, pozostaje wartość 1023. Tak dzieje się w każdym kierunku (ewentualnie wartość zamiast rosnąć maleje do 0 w połowie wychylenia, w przypadku przeciwnych kierunków). I teraz pytanie: czy ja coś źle podłączyłem? Co robię źle? Kupiłem dwie sztuki tych joysticków i obie identycznie się zachowują, co sugeruje, że błąd może leżeć po mojej stronie. Pozdrawiam serdecznie, Michał
-
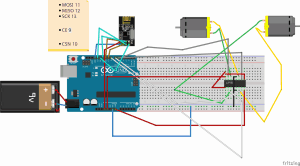
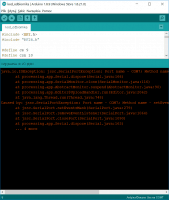
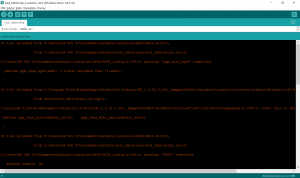
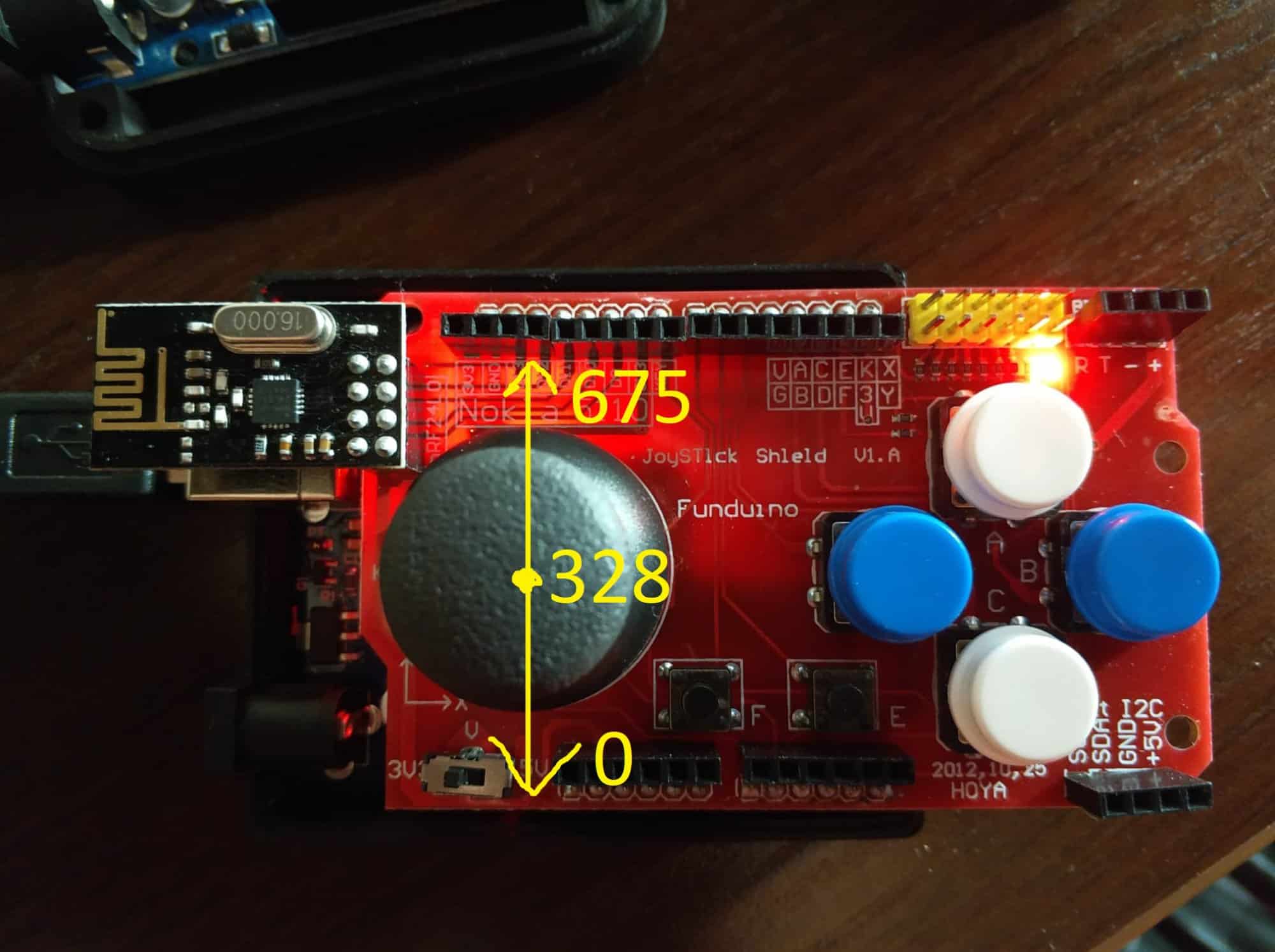
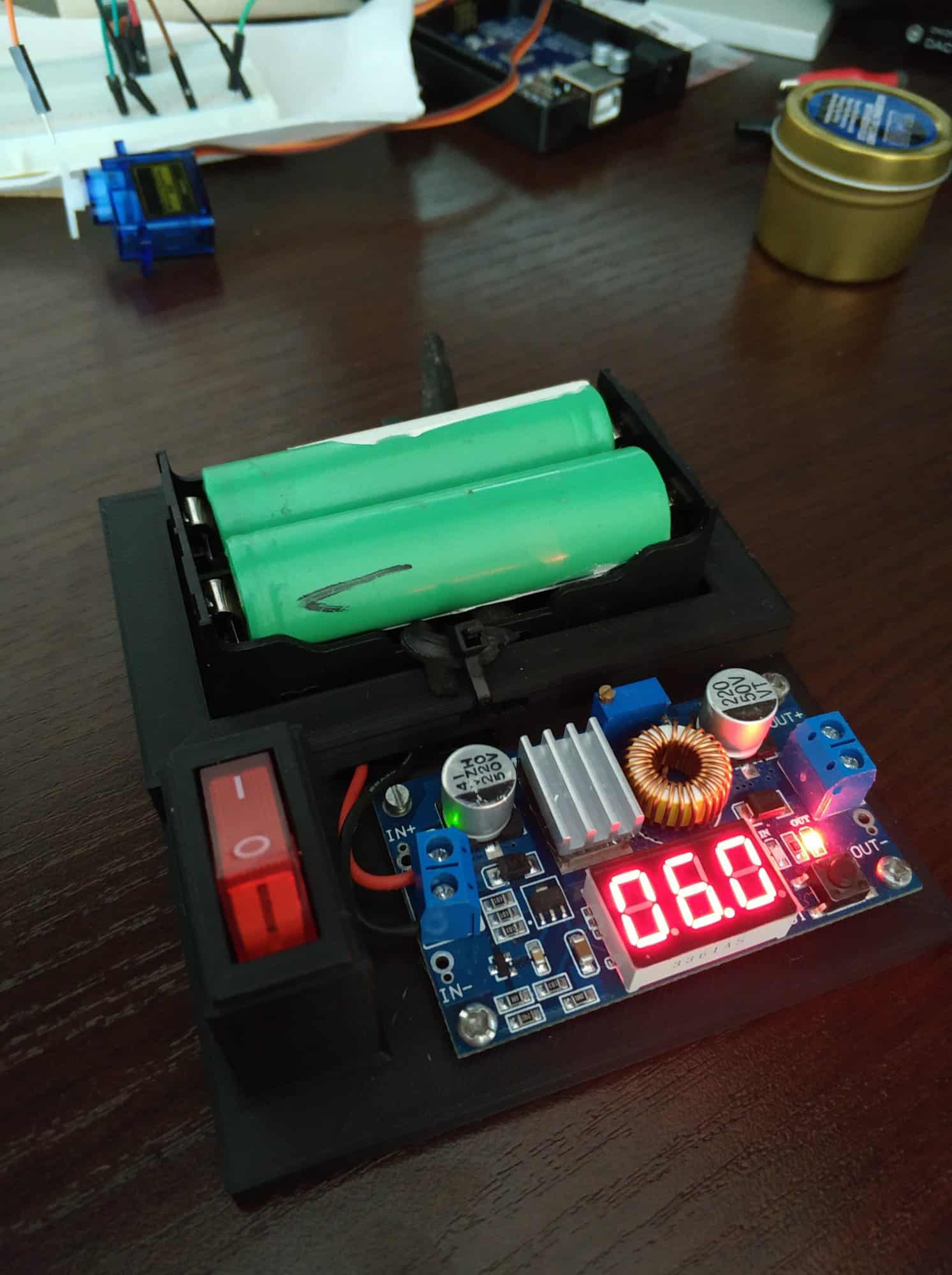
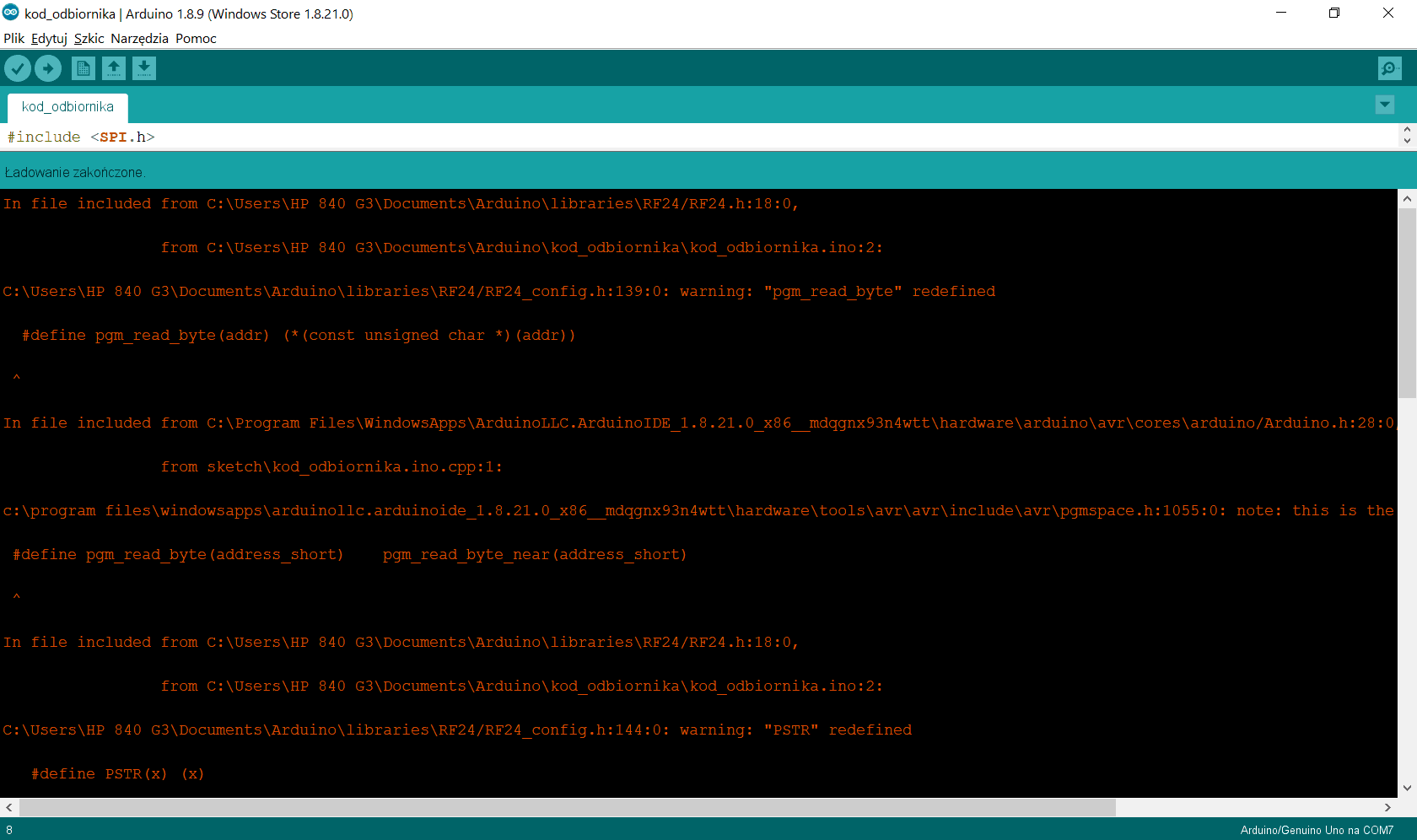
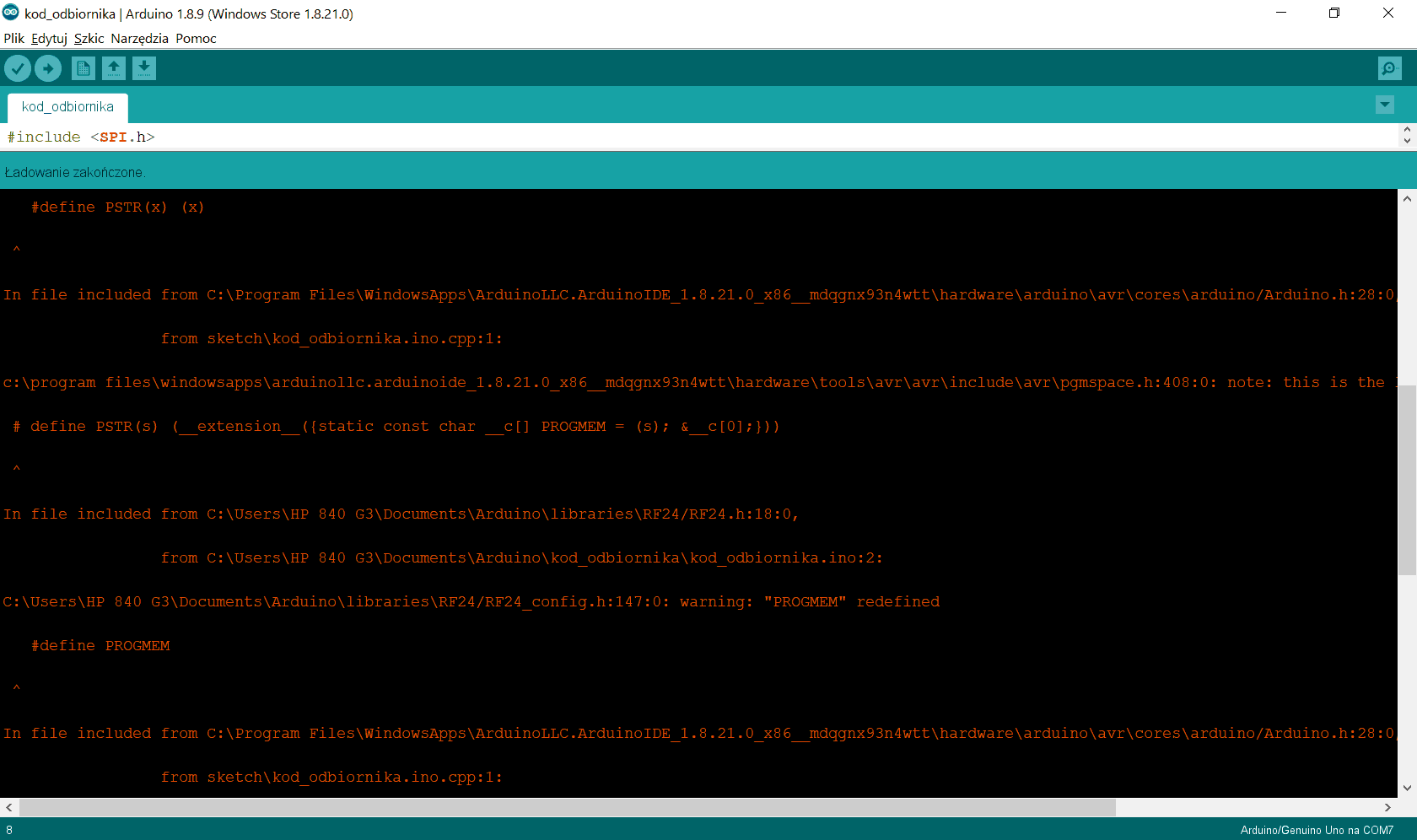
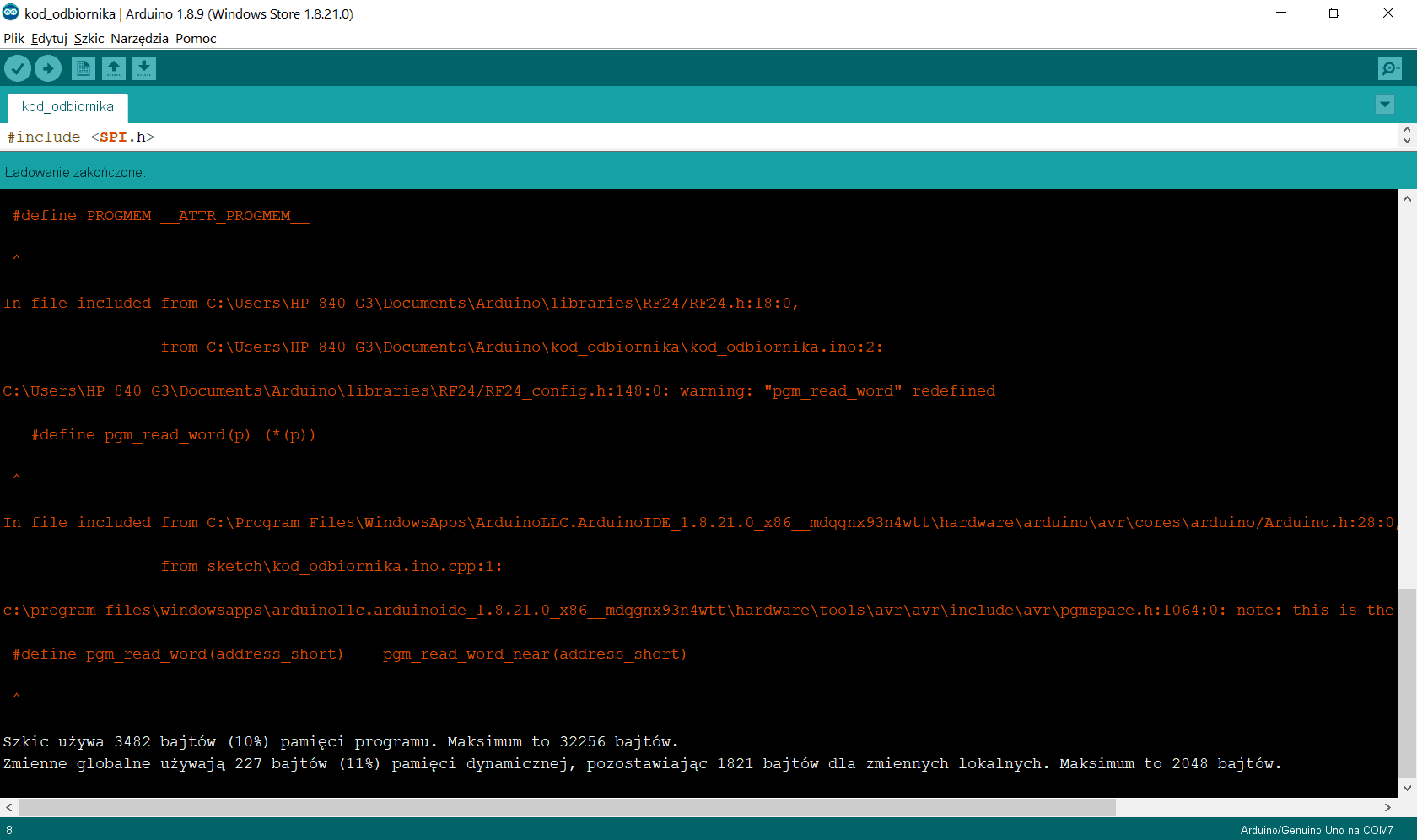
Czesc. Zmontowalem sobie uklad ktory bedzie sterowal silnikami: przod i tyl. Program wgrany do nadajnika i odbiornika, ladnie pieknie wszystko pokazane w monitorze portu szergowego, ze pozycje joysticka sa odczytane lecz silniki nie ruszaja sie. Moze mi ktos wytlumaczyc dlaczego tak sie dzieje? Zasilanie 2x 18650 przetwornica wyregulowane na 6V - silniki + arduino uno/ joystick shield + uno - zasilanie z portu usb. Silniki normalne kreca sie podpiete jak na schemacie i podanie tych wartosci co w kodzie, ale bez nrfa i joysticka wiec sa sprawne oraz mostek h. Sprawdzalem tez na innym joystick shieldzie i tez tez nie dziala 😞 Czasami mi w terminalu takie cos wyskakuje (zalacznik) To nie sa bledy? RF24 wersja 1.1.6 Kod Nadajnika (joystick shield+ uno): #include <SPI.h> #include "RF24.h" #define ce 9 #define csn 10 RF24 myRadio (ce, csn); byte addresses[][6] = {"0"}; struct package { int X=1; int Y=1; }; typedef struct package Package; Package data; void setup() { Serial.begin(115200); delay(100); myRadio.begin(); myRadio.setChannel(115); myRadio.setPALevel(RF24_PA_MIN); myRadio.setDataRate( RF24_250KBPS ) ; myRadio.openWritingPipe( addresses[0]); delay(100); } void loop() { myRadio.write(&data, sizeof(data)); Serial.print("X:"); Serial.print(data.X); Serial.print(" Y"); Serial.println(data.Y); data.X = analogRead(A0); data.Y = analogRead(A1); delay(100); } Kod odbiornika (uno + silniki): #include <SPI.h> #include "RF24.h" #define ce 9 #define csn 10 RF24 myRadio (ce, csn); struct package { int X=351; int Y=328; }; byte addresses[][6] = {"0"}; int OUT1 = 5; int OUT2 = 6; int OUT3 = 7; int OUT4 = 8; typedef struct package Package; Package data; void setup() { Serial.begin(115200); delay(1000); myRadio.begin(); myRadio.setChannel(115); myRadio.setPALevel(RF24_PA_MAX); myRadio.setDataRate( RF24_250KBPS ) ; myRadio.openReadingPipe(1, addresses[0]); myRadio.startListening(); pinMode(OUT1, OUTPUT); pinMode(OUT2, OUTPUT); pinMode(OUT3, OUTPUT); pinMode(OUT4, OUTPUT); } void loop() { if ( myRadio.available()) { while (myRadio.available()) { myRadio.read( &data, sizeof(data) ); } Serial.print("X:"); Serial.print(data.X); Serial.print(" Y"); Serial.println(data.Y); int X = data.X; int Y = data.Y; if(Y>400){ digitalWrite(OUT1,1); digitalWrite(OUT2,0); digitalWrite(OUT3,0); digitalWrite(OUT4,1); }else if(Y<200){ digitalWrite(OUT1,0); digitalWrite(OUT2,1); digitalWrite(OUT3,1); digitalWrite(OUT4,0); } else{ digitalWrite(OUT1,0); digitalWrite(OUT2,0); digitalWrite(OUT3,0); digitalWrite(OUT4,0); } } }