Przeszukaj forum
Pokazywanie wyników dla tagów 'kompilacja'.
Znaleziono 3 wyniki
-
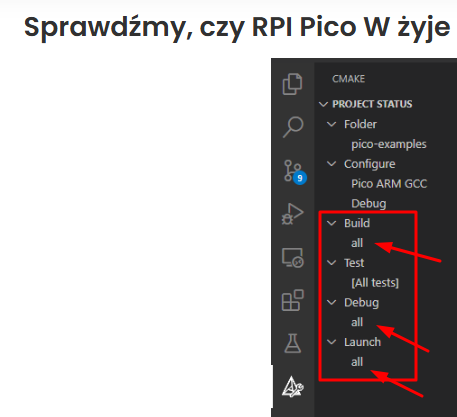
Cześć wszystkim właśnie rozpoczynam kurs z obsługi raspberry Pi Pico i utknąłem na etapie kompilacji plików w VSC, a mianowicie nie pojawia mi sie "all" pod "build", "debug" i "launch" i nie potrafie poprawnie przejść kompilacji bo wyskakują błędy. wiem, że to dopiero początek przygody a ja już nie ogarniam, ale proszę o pomoc bo bardzo interesuje mnie temat programowania i majsterkowania, a nie chce dać za wygraną z góry dziękuję za pomoc
-
Witam. Jestem świeżym posiadaczem Arduino uno. Chciałem przejść kurs Arduino poziom 1. I już przy pierwszym zadaniu mam problem. Zadanie polega na złączeniu diody. Przepisałem program ze strony kursu. Klikam na "Zweryfikuj" i następuje sprawdzenie kompilacji. I ta czynność programu trwa i trwa w nieskończoność. Czekałem 4 godziny na zakończenie kompilacji i nic.Kompilacja się nie zakończyła. Czy to normalne tak powinno być czy może trzeba komputer zastawić na noc. Przyznam że jestem zniechęcony. To samo dotyczy przykładowego programu Blink. Jeśli możecie pomóżcie. System XP. Program wykrywa własciwy port oraz płytke. Program Blink | Arduino 1.8.14 Hourly Build 2020/14/04
-
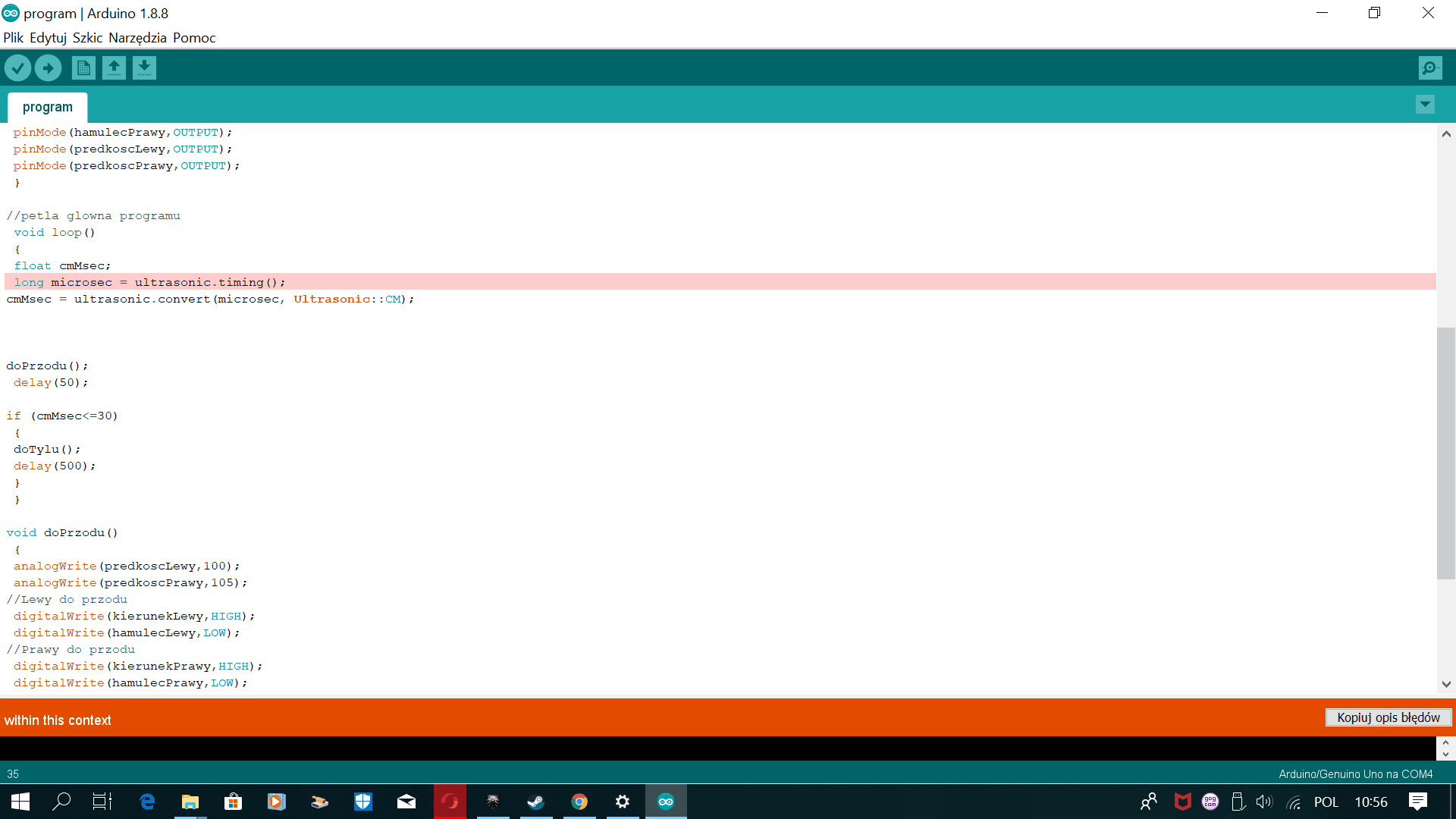
Witam mam problem z kompilacją gdyż wyskakuje mi taki błąd i nie wiem czemu tak się dzieje. Pomoże ktoś ? #include <Ultrasonic.h> // definicje dla HCSR04 #define TRIGGER_PIN 7 #define ECHO_PIN 4 Ultrasonic ultrasonic(TRIGGER_PIN, ECHO_PIN); // silnik lewy const int kierunekLewy=12; const int hamulecLewy=9; const int predkoscLewy=3; //silnik prawy const int kierunekPrawy=13; const int hamulecPrawy=8; const int predkoscPrawy=11; //ustawienia void setup() { Serial.begin(9600); pinMode(kierunekLewy,OUTPUT); pinMode(kierunekPrawy,OUTPUT); pinMode(hamulecLewy,OUTPUT); pinMode(hamulecPrawy,OUTPUT); pinMode(predkoscLewy,OUTPUT); pinMode(predkoscPrawy,OUTPUT); } //petla glowna programu void loop() { float cmMsec; long microsec = ultrasonic.timing(); cmMsec = ultrasonic.convert(microsec, Ultrasonic::CM); doPrzodu(); delay(50); if (cmMsec<=30) { doTylu(); delay(500); } } void doPrzodu() { analogWrite(predkoscLewy,100); analogWrite(predkoscPrawy,105); //Lewy do przodu digitalWrite(kierunekLewy,HIGH); digitalWrite(hamulecLewy,LOW); //Prawy do przodu digitalWrite(kierunekPrawy,HIGH); digitalWrite(hamulecPrawy,LOW); } void doTylu() { analogWrite(predkoscLewy,200); analogWrite(predkoscPrawy,0); //Lewy do przodu digitalWrite(kierunekLewy,LOW); digitalWrite(hamulecLewy,LOW); //Prawy stop digitalWrite(kierunekPrawy,HIGH); digitalWrite(hamulecPrawy,HIGH); }