Przeszukaj forum
Pokazywanie wyników dla tagów 'kot'.
Znaleziono 2 wyniki
-
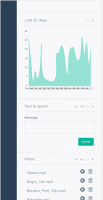
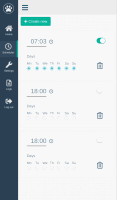
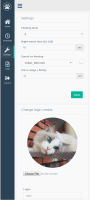
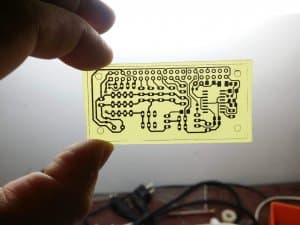
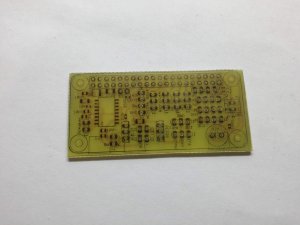
Interaktywna zabawka dla kotów gwarantująca zabawę w każdej chwili, żaden kot nie oprze się uciekającej czerwonej kropce. Jest to niewielkie pudełeczko z wbudowanym modułem wifi i banalnie prostą obsługą. Główne funkcje: sterowanie dowolnym urządzeniem z przeglądarką internetową. losowe ruchy lasera o zmiennej prędkości. ustawianie czasu jak długo ma działać. ustawianie harmonogramów automatycznego włączenia. regulacja jasności lasera. regulacja zakresu ruchu i prędkości lasera. możliwość sterowania z dowolnego miejsca na świecie przez internet. sterowanie za pomocą google asystenta. prosta konfiguracja. Zabawka może być zasilana dowolną ładowarką od telefonu, może to być również powerbank. Przy pierwszym uruchomieniu zabawki, zostanie uruchomiona nowa sieć wifi ..::LASERCAT::.. wystarczy połączyć się z nią i wskazać naszą sieć domową, a po zrestartowaniu urządzenie automatycznie podłączy się do niej i już możemy korzystać z zabawki. Z tyłu znajduje się wejście zasilania micro USB, jak w telefonie oraz przycisk. Krótkie wciśnięcie to włączenie/wyłączenie lasera, przytrzymanie przez 3 sek. powoduje rozłączenie obecnej sieci wifi i uruchomienie ponownej konfiguracji. Gdy urządzenie jest już podłączone do naszej sieci wifi to po wpisaniu adresu zabawki w przeglądarce internetowej zobaczymy panel sterujący: Zastosowany laser jest małej mocy, taki sam jak w innych tego typu zabawkach czy bazarkowych wskaźnikach. Dodatkowo dla bezpieczeństwa jest możliwość ustawienia mocy świecenia lasera od 0% do 100%. Pozostałe ustawienia pozwolą dostosować zakres ruchów do miejsca w którym znajduje się zabawka i określić czy kropka ma się poruszać tylko po podłodze, czy częściowo wchodzić na ścianę co może dostarczyć dodatkowej frajdy dla kota. Schemat jest bardzo prosty: Widok płytki PCB: Jak zwykle w garażowym zaciszu metodą "żelazkową" - elektronicy używają żelazka zdecydowanie częściej jak ich partnerki - powstaje mała płytka. Płytka została zabezpieczona przed utlenianiem lakierem PVB16. Całą robotę wykonuje tutaj tani i lubiany układ ESP8266, który posiada moduł WiFi. Dioda laserowa jest zasilana źródłem prądowym dodatkowo kluczowanym z PWM-a co pozwala płynnie regulować jasność od 0% do 100%. Skoro już bebechy mam, to teraz trzeba to wszystko złożyć w całość. Obudowę wykonałem ze sklejki wyciętej laserowo, składanej na wczepy palcowe. No to składamy: Dodanie serwomechanizmów do których przyczepiony jest laser. Oczywiście bez trytytki projekt by się nie udał No i sprzęt jest gotowy, ale co nam po sprzęcie jak on zupełnie nie wie co ma robić? Nie wie, że teraz trzeba machać tym laserkiem tak żeby kot ganiał w tę i we w tę Trzeba to wszystko zaprogramować. Uruchamiamy nasze ulubione IDE czyli Visual Studio Code z wtyczką PlatformIO i zaczynamy pisać program. Soft został napisany z wykorzystaniem Arduino Core, a na całość składa się kilka części: główny program sterujący silniczkami, wyznaczanie losowych ścieżek. serwer www, który udostępnia ładny panel sterowania. konfiguracja sieci WiFi z wykorzystaniem Captive Portal. multicast DNS. stworzenie strony www (html + css + javascript). obsługa komunikacji po websockecie. zdalne wgrywanie plików przez stronę www, np. zmiana wyglądu głównej strony. zdalna aktualizacja oprogramowania bez zbędnych kabli. W oczekiwaniu na gotowe oprogramowanie tester cierpliwie czeka. Panel sterujący dostępny z poziomu przeglądarki internetowej nie jest hostowany nigdzie na zewnątrz, całość znajduje się w zabawce, wykorzystałem bootstrapa plus kilka dodatkowych komponentów. Zastosowany mDNS pozwala połączyć się z urządzeniem wpisując w przeglądarce adres "lasercat.local" zamiast adresu IP. Niestety na chwilę obecną android nie wspiera tego typu rozwiązań, ale na iPhonach działa to bardzo dobrze. Na filmie mała prezentacja z trochę już wybawionym głównym testerem Elroyem a poniżej pokazano jak można włączyć zabawkę po prostu mówiąc do telefonu "Ok Google, włącz laser"


















-
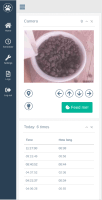
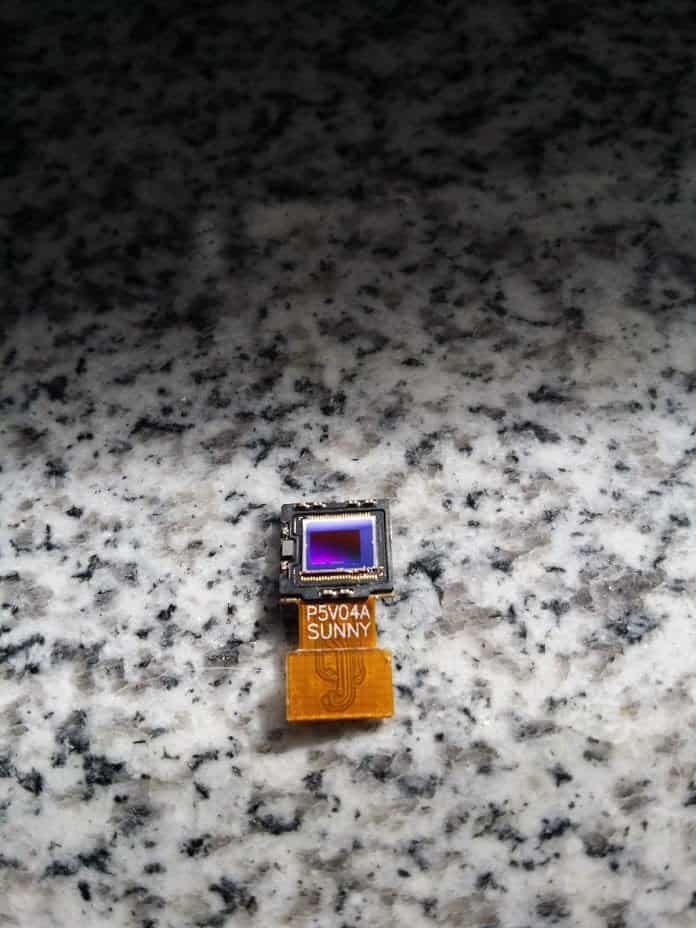
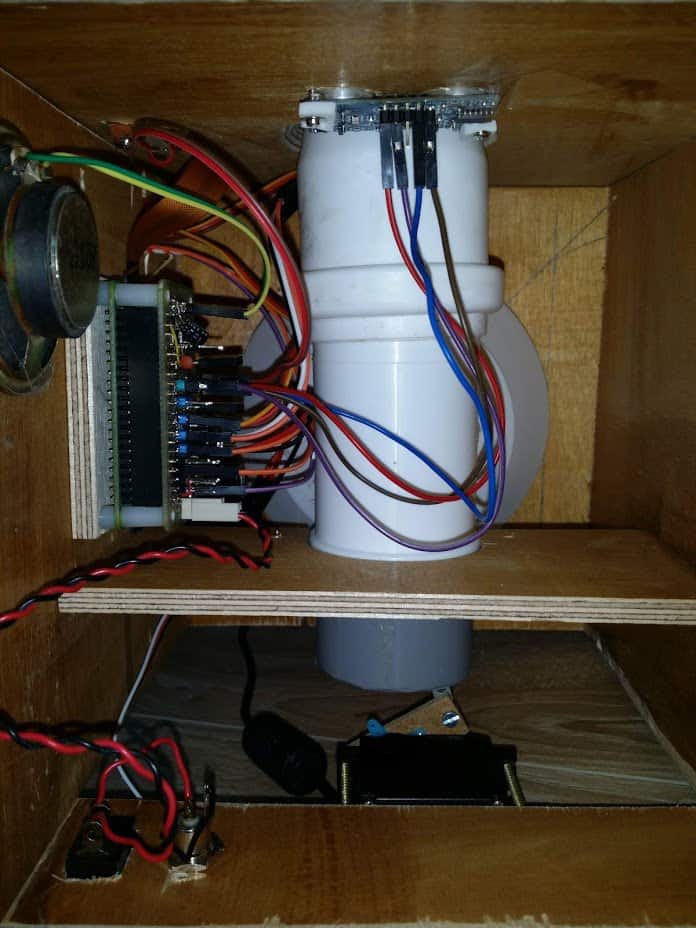
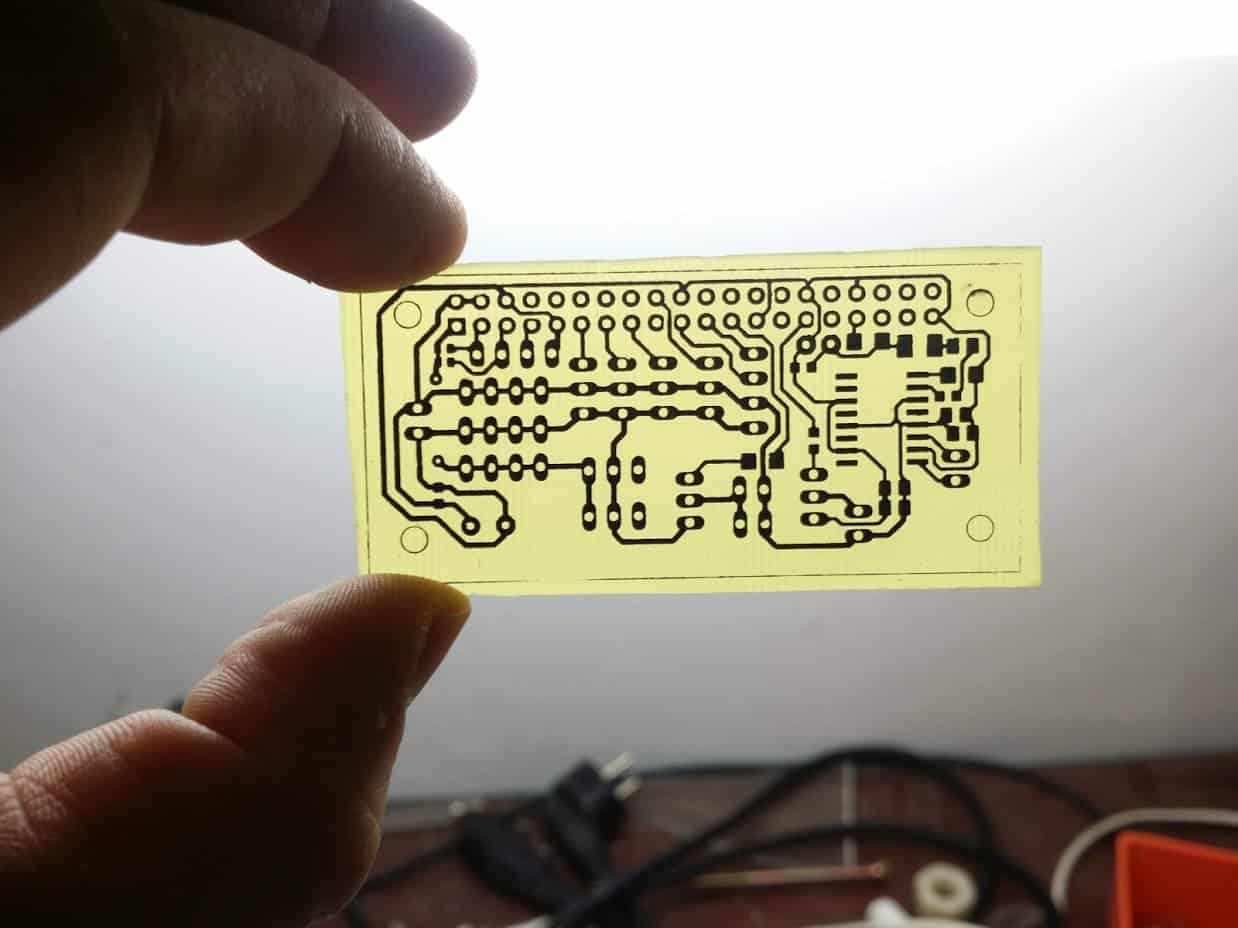
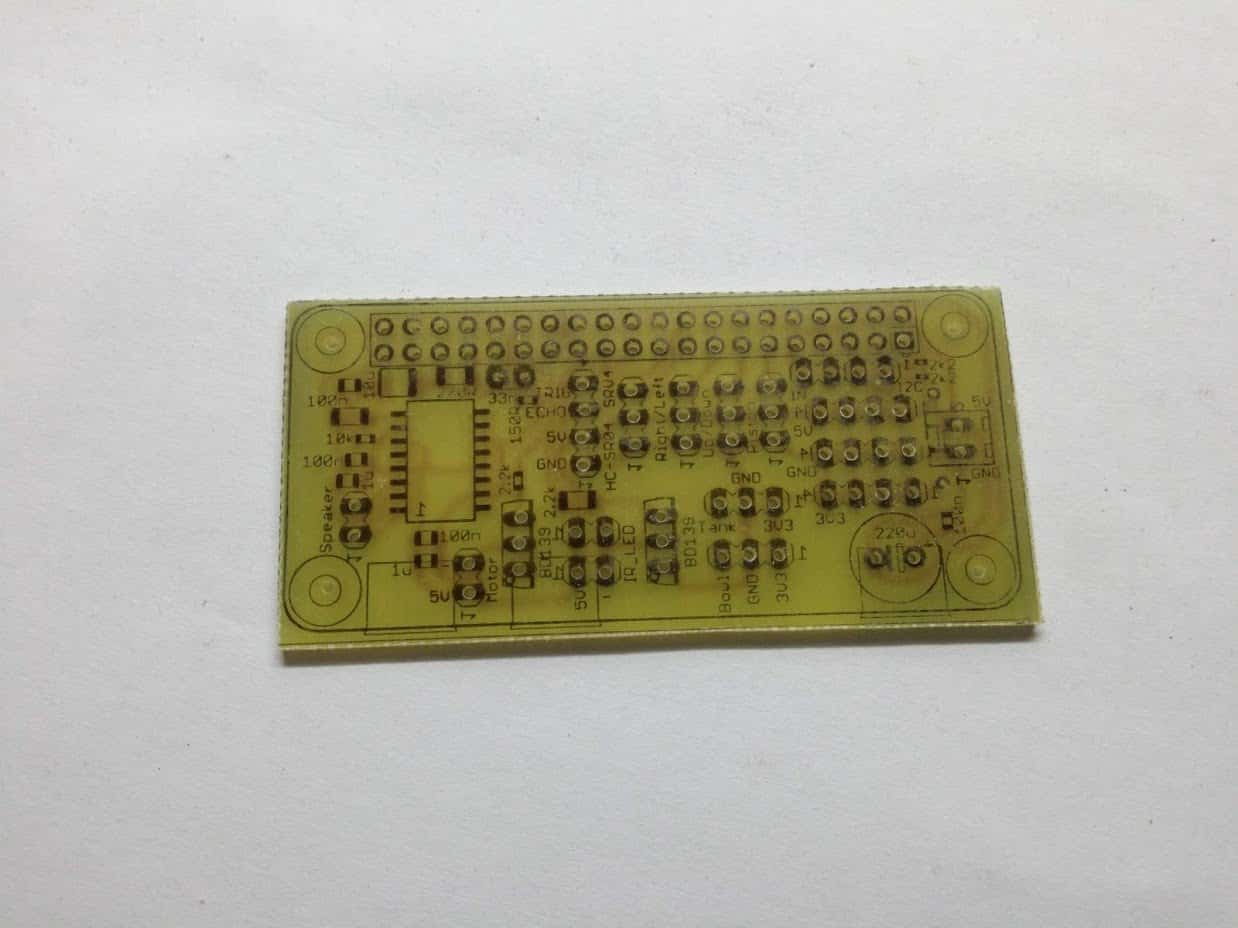
Posiadając dwa futrzaki pojawiła się potrzeba zapewnienia im odpowiedniej ilości jedzenia, szczególnie podczas weekendowych wyjazdów. Przeglądając gotowe rozwiązania stwierdziłem, że najlepiej zbudować samemu mając przy tym sporo frajdy i satysfakcji. Urządzenie zostało zbudowane w oparciu o: Raspberry Pi Zero W Kamera do Raspberry Pi Serwo L360 Uchwyt na kamerę Czujnik odległości Główne cechy urządzenia Zdalna możliwość karmienia z dowolnego miejsca na świecie podgląd z ruchomej kamery ultradźwiękowy czujnik wykrywający kota oświetlenie IR pozwalające na podgląd w nocy możliwość wgrywania i odtwarzania dowolnych plików audio opcja "Text To Speach" duży 10 litrowy zbiornik na karę detekcja pustego zbiornika harmonogram automatycznego podawania karmy Pierwszym etapem i najtrudniejszym było wykonanie niezawodnego mechanizmu podającego karmę. Przetestowałem kilka rozwiązań: podajnik ślimakowy mechanizm koszykowy zasuwa podajnik tłokowy - to rozwiązanie sprawdziło się świetnie Układ podający powstał z ogólnodostępnych elementów PCV Niżej widok od tyłu pokazujący montaż tłoka Na filmie pokazana jest idea pracy mechanizmu, były to pierwsze próby ze słabszym serwomechanizmem. Ostatecznie został wymieniony na L360, a ruch obrotowy samego serwa zastąpiony ruchem "po łuku - przód, tył" co pozwoliło zapobiec ewentualnemu zakleszczeniu się karmy. Mechanizm - film Kolejnym etapem było wykonanie dodatkowej elektroniki obsługującej: 2 serwa do kamery 1 serwo podające karmę wzmacniacz audio czujnik odbiciowy IR czujnik zbliżeniowy Dodatkową wyzwaniem było przerobienie zwykłej kamery na kamerę NoIR, w tym celu zdemontowałem układ optyczny i delikatnie usunąłem filtr podczerwony. Poniżej wygląd matrycy po zdemontowaniu tych elementów. Po ponownym zamontowaniu soczewki, kamera działała już prawidłowo przy oświetleniu podczerwonym. Poniżej widok od spodu: Główne oprogramowanie sterujące sprzętem zostało napisane w pythonie, a interfejs użytkownika w PHP, na raspberry pi jest postawiony serwer www razem z mysql, tak więc jest to mały potworek do karmienia kotów. Sterowanie odbywa się przez stronę www, co wyeliminowało pisanie dedykowanej aplikacji na każdy z systemów osobno. Na koniec kilka dodatkowych zdjęć