Przeszukaj forum
Pokazywanie wyników dla tagów 'laser'.
Znaleziono 4 wyniki
-
Interaktywna zabawka dla kotów gwarantująca zabawę w każdej chwili, żaden kot nie oprze się uciekającej czerwonej kropce. Jest to niewielkie pudełeczko z wbudowanym modułem wifi i banalnie prostą obsługą. Główne funkcje: sterowanie dowolnym urządzeniem z przeglądarką internetową. losowe ruchy lasera o zmiennej prędkości. ustawianie czasu jak długo ma działać. ustawianie harmonogramów automatycznego włączenia. regulacja jasności lasera. regulacja zakresu ruchu i prędkości lasera. możliwość sterowania z dowolnego miejsca na świecie przez internet. sterowanie za pomocą google asystenta. prosta konfiguracja. Zabawka może być zasilana dowolną ładowarką od telefonu, może to być również powerbank. Przy pierwszym uruchomieniu zabawki, zostanie uruchomiona nowa sieć wifi ..::LASERCAT::.. wystarczy połączyć się z nią i wskazać naszą sieć domową, a po zrestartowaniu urządzenie automatycznie podłączy się do niej i już możemy korzystać z zabawki. Z tyłu znajduje się wejście zasilania micro USB, jak w telefonie oraz przycisk. Krótkie wciśnięcie to włączenie/wyłączenie lasera, przytrzymanie przez 3 sek. powoduje rozłączenie obecnej sieci wifi i uruchomienie ponownej konfiguracji. Gdy urządzenie jest już podłączone do naszej sieci wifi to po wpisaniu adresu zabawki w przeglądarce internetowej zobaczymy panel sterujący: Zastosowany laser jest małej mocy, taki sam jak w innych tego typu zabawkach czy bazarkowych wskaźnikach. Dodatkowo dla bezpieczeństwa jest możliwość ustawienia mocy świecenia lasera od 0% do 100%. Pozostałe ustawienia pozwolą dostosować zakres ruchów do miejsca w którym znajduje się zabawka i określić czy kropka ma się poruszać tylko po podłodze, czy częściowo wchodzić na ścianę co może dostarczyć dodatkowej frajdy dla kota. Schemat jest bardzo prosty: Widok płytki PCB: Jak zwykle w garażowym zaciszu metodą "żelazkową" - elektronicy używają żelazka zdecydowanie częściej jak ich partnerki - powstaje mała płytka. Płytka została zabezpieczona przed utlenianiem lakierem PVB16. Całą robotę wykonuje tutaj tani i lubiany układ ESP8266, który posiada moduł WiFi. Dioda laserowa jest zasilana źródłem prądowym dodatkowo kluczowanym z PWM-a co pozwala płynnie regulować jasność od 0% do 100%. Skoro już bebechy mam, to teraz trzeba to wszystko złożyć w całość. Obudowę wykonałem ze sklejki wyciętej laserowo, składanej na wczepy palcowe. No to składamy: Dodanie serwomechanizmów do których przyczepiony jest laser. Oczywiście bez trytytki projekt by się nie udał No i sprzęt jest gotowy, ale co nam po sprzęcie jak on zupełnie nie wie co ma robić? Nie wie, że teraz trzeba machać tym laserkiem tak żeby kot ganiał w tę i we w tę Trzeba to wszystko zaprogramować. Uruchamiamy nasze ulubione IDE czyli Visual Studio Code z wtyczką PlatformIO i zaczynamy pisać program. Soft został napisany z wykorzystaniem Arduino Core, a na całość składa się kilka części: główny program sterujący silniczkami, wyznaczanie losowych ścieżek. serwer www, który udostępnia ładny panel sterowania. konfiguracja sieci WiFi z wykorzystaniem Captive Portal. multicast DNS. stworzenie strony www (html + css + javascript). obsługa komunikacji po websockecie. zdalne wgrywanie plików przez stronę www, np. zmiana wyglądu głównej strony. zdalna aktualizacja oprogramowania bez zbędnych kabli. W oczekiwaniu na gotowe oprogramowanie tester cierpliwie czeka. Panel sterujący dostępny z poziomu przeglądarki internetowej nie jest hostowany nigdzie na zewnątrz, całość znajduje się w zabawce, wykorzystałem bootstrapa plus kilka dodatkowych komponentów. Zastosowany mDNS pozwala połączyć się z urządzeniem wpisując w przeglądarce adres "lasercat.local" zamiast adresu IP. Niestety na chwilę obecną android nie wspiera tego typu rozwiązań, ale na iPhonach działa to bardzo dobrze. Na filmie mała prezentacja z trochę już wybawionym głównym testerem Elroyem a poniżej pokazano jak można włączyć zabawkę po prostu mówiąc do telefonu "Ok Google, włącz laser"


















-

Sprzedam części pod ploter laserowy CO2 100W
rafiix opublikował temat w Sprzedam/Kupię/Zamienię/Praca
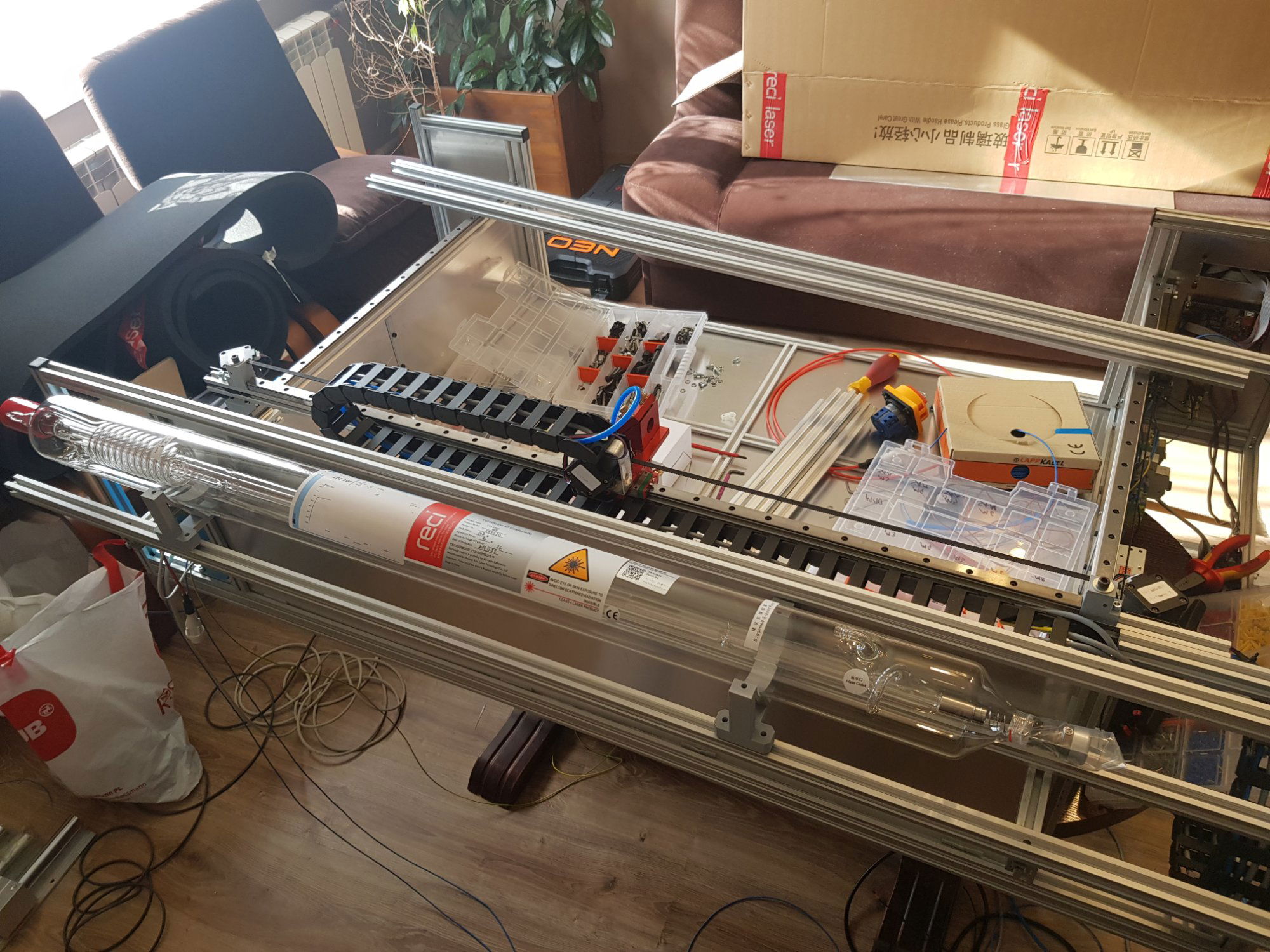
Witam, Mam do sprzedania elementy plotera laserowego. Budowę tego plotera rozpocząłem w 2020r ale tak na prawdę nigdy go nie skończyłem (niestety zabrakło czasu). W między czasie miałem na głowie jeszcze przeprowadzkę, więc konstrukcja widoczna na zdjęciach została rozebrana i czekała aż znowu będę miał miejsce na tego typu projekty. Nie chcę, by wszystko to dalej leżało i się kurzyło, więc chętnie sprzedałbym komuś cały zestaw. W skład zestawu wchodzi: - Tuba laserowa firmy RECI 100W (Nigdy nie odpalona/Nie zalana czynnikiem chłodzącym) - Zasilacz Cloudray DY13 - Profile V-slot 20x20 + kilka 20x40 (Dorzucam wszystkie jakie mam, więc znacznie więcej niż na samej widocznej konstrukcji) - Prowadnice liniowe HIWIN (prawdopodobnie podróbki) + łożyska MGN15CH (oryginały) - Głowicę laserową pod soczewkę z regulacją skupienia - Zestaw zwierciadeł i soczewkę - 2x Mocowanie zwierciadeł (3pkt regulacja) - Okulary ochronne (Dostałem w gratisie do Tuby) - mAmperomierz panelowy - Pełno gratisów (Prowadniki kablowe, silniki, różne elementy mechaniczne) Za cały powyższy zestaw chciałbym 3tys zł, czyli tyle ile jest warta sama tuba laserowa. Niestety faktury nie wystawię, więc jest to zestaw typowo dla hobbysty, który chciałby sobie stworzyć taki ploter w swoim warsztacie Odbiór tylko osobisty ze względu na ilość gratów (Tychy/Oświęcim). Ewentualnie możemy się spotkać gdzieś w połowie drogi (do 100km) - ale wszystko do dogadania Pozdrawiam

-
Dzień dobry! Zdecydowałam się na post na forum, poieważ mam problem ze zrobioną w Inkscape grafiką wektorową. Wykonałam 36 symboli-grafik w jednym osobnym pliku i później wkleiłam je w ramkę w drugim pliku. Plik otwiera się, działa i może być prawidłowo zapisywany w różnych formatach, jednak w samym oprogramowaniu do lasera Universal część symboli znika lub wyświetla się w nieprawidłowym kolorze, albo tylko częściowo, a części w ogóle nie widać. Ujednolicałam już kolor na 255 B, 0 R, 0 G(do graweru i tak był ustawiony laser. Nie wiem co może być przyczyną, już dość dużo takich rzeczy robiłam, a zdarzyło mi się to pierwszy raz. Czy ktoś miał może taki kłopot i wie co zrobić? Dziękuję z góry za pomoc.
-
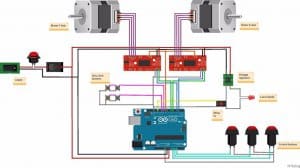
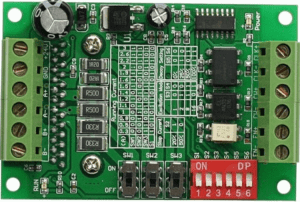
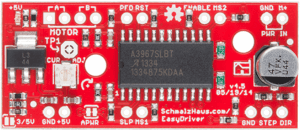
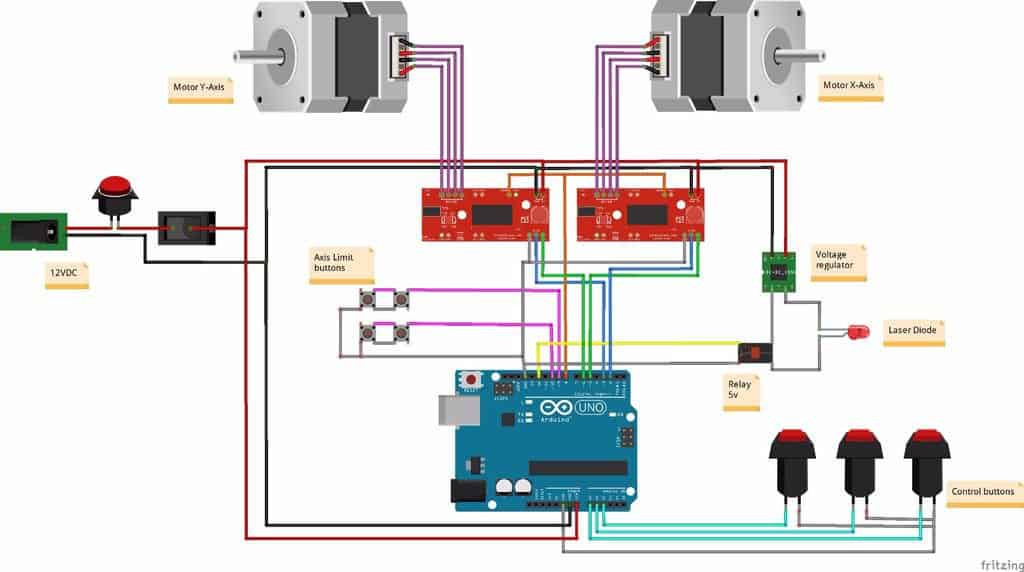
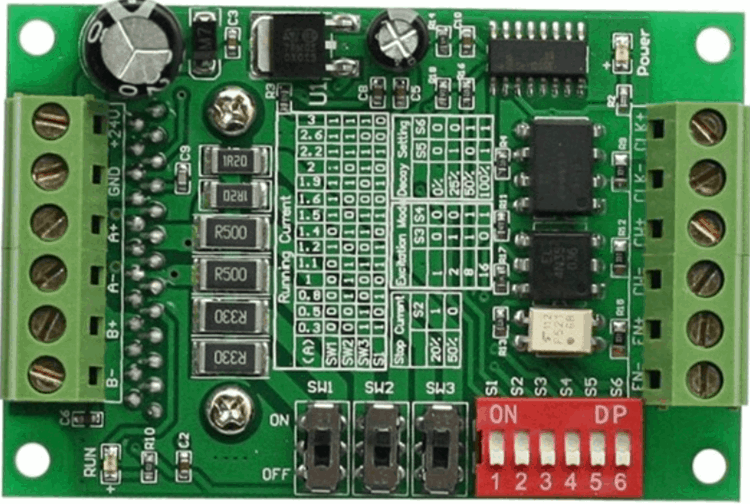
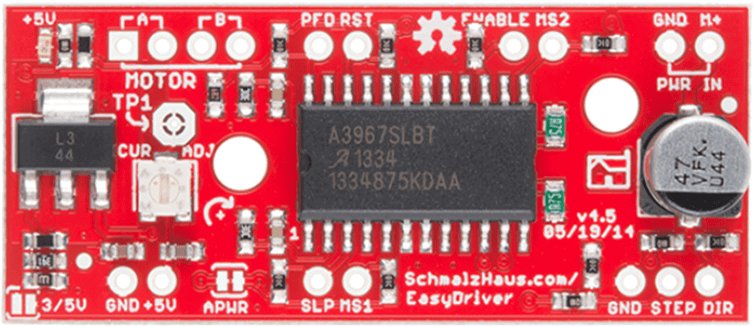
Cześć wszystkim. Postanowiłem zbudować grawerkę laserową z instrukcji ze strony instructables. Zakupiłem wszystkie części zgodnie z opisem. Zmontowałem wszystkie mechaniczne części oraz ramę, pozostaje więc już jedynie podłączenie elektroniki. Schemat podany przez autora wygląda następująco: I tu pojawia się pierwszy problem, mianowicie sterowniki silników krokowych na schemacie są inne od sterowników użytych przez autora (oraz podanych w liście części). Te które występują na schemacie to najprawdopodobniej Easy Driver: Natomiast w liście części występuje sterownik TB6560 3A: Problem polega więc na tym, że nazwy wejść różnią się na obu sterownikach i nie wiem w jaki sposób podłączyć sterownik TB6560 mając informacje o podłączeniu sterownika Easy Driver (ze schematu). Przeczytałem kurs elektroniki z forum oraz przejrzałem ten dotyczący programowania Arduino lecz nie znalazłem informacji, które pozwoliłyby rozwikłać mi ten problem. Innych wątków dotyczących tego zagadnienia także nie znalazłem, a forum zostało mi polecone na uczelni (studia niezwiązane z elektroniką). Byłbym wdzięczny za wskazanie dalszej drogi. Nie mam doświadczenia z elektroniką w związku z czym chciałbym jeszcze spytać w jaki sposób można zaopatrzyć się w przewody? W internecie znalazłem jedynie przewody męskie, żeńskie itp. Czy jeśli mam na przykład podłączyć elementy odległe o 80cm to mam połączyć kilka takich przewodów, czy też lepiej kupić na długość przewód w sklepie elektrycznym? Dzięki za przeczytanie i pomoc