Przeszukaj forum
Pokazywanie wyników dla tagów 'mistakes'.
Znaleziono 2 wyniki
-
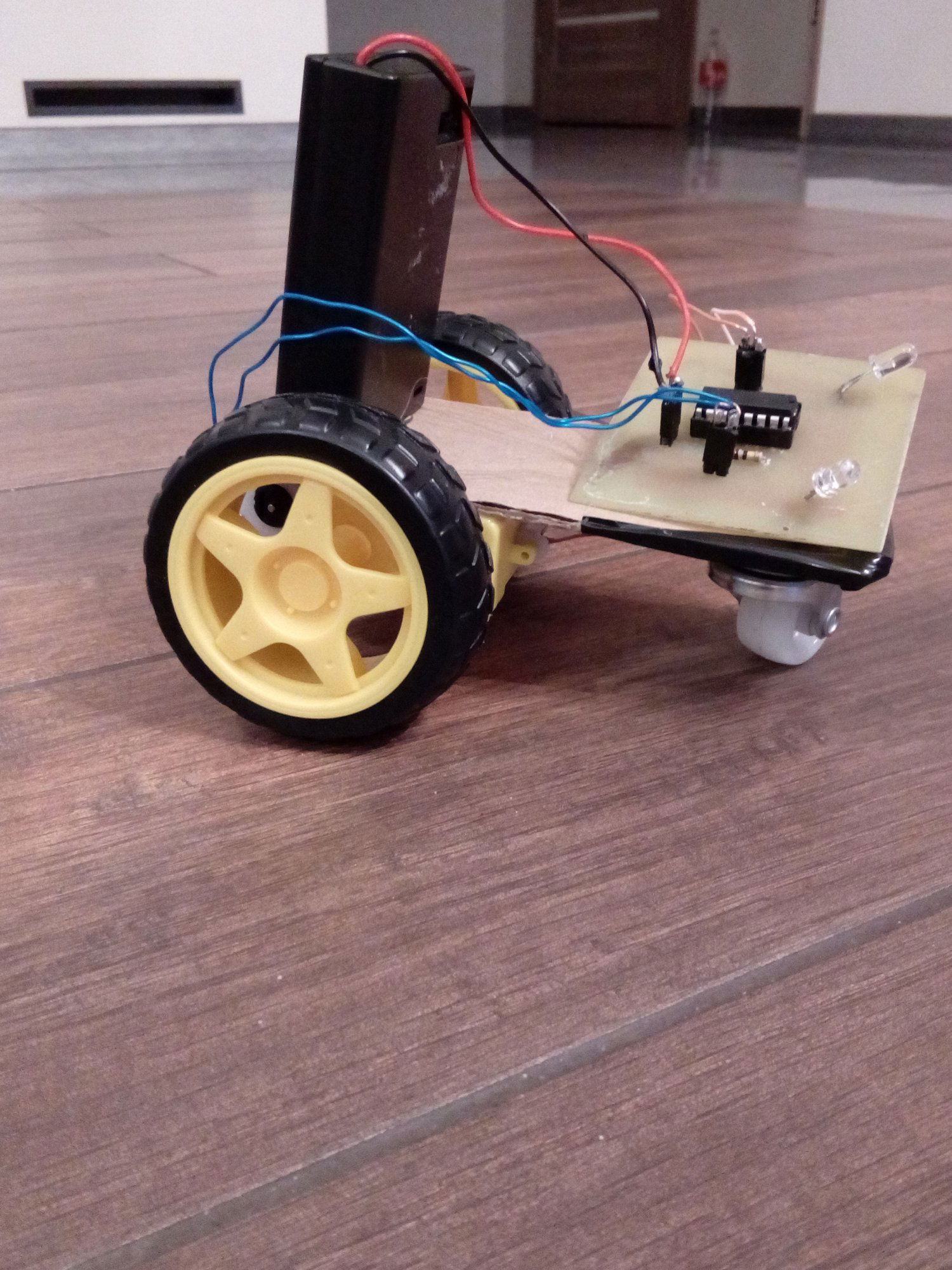
Jakiś czas temu próbowałem już zbudować światłoluba, jedna z moich nieudolnych prób pojawiła się w jednym z postów na forum. Ale wiele nieudanych prób nie satysfakcjonowało mnie. Aż w końcu powstał robot, nad którym pracowałem około miesiąca. Jego właśnie opisuję tutaj. Podwozie powstało z kartonu, który wkrótce zostanie zastąpiony czymś twardszym. Nic szczególnego. Jednak chciałem, aby zajmowało jak najmniej miejsca. Zastosowałem pewien układ silników, który przy moich silnikach Dagu był najkorzystniejszy. Wybrałem te silniki, ponieważ była to najlepsza opcja kiedy je zamawiałem. Układ zmontowałem na wytrawionym przeze mnie PCB pochodzącej z tego miejsca. Trochę rzeczy zostało zniszczone. Rozmiar podwozia (bez kół) to 14x6 cm. Największym sukcesem jest to, że działa nie topiąc pojemnika na baterie. Może nie jest to najładniejszy robot na forum, jest niczym przysłowiowy ,,odgrzewany kotlet", ale jestem z niego bardzo dumny. Nad wyglądem popracuję w najbliższych dniach, napiszę o tym w postach poniżej .


-
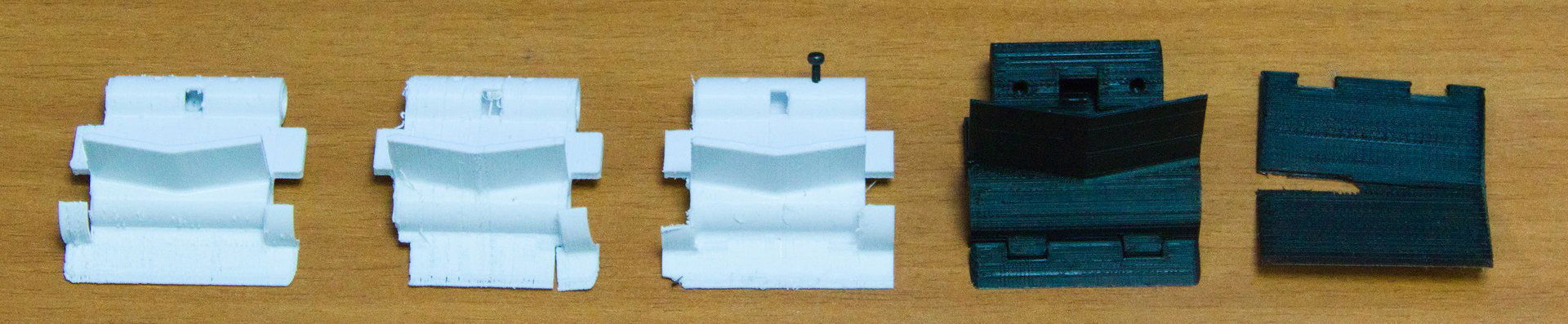
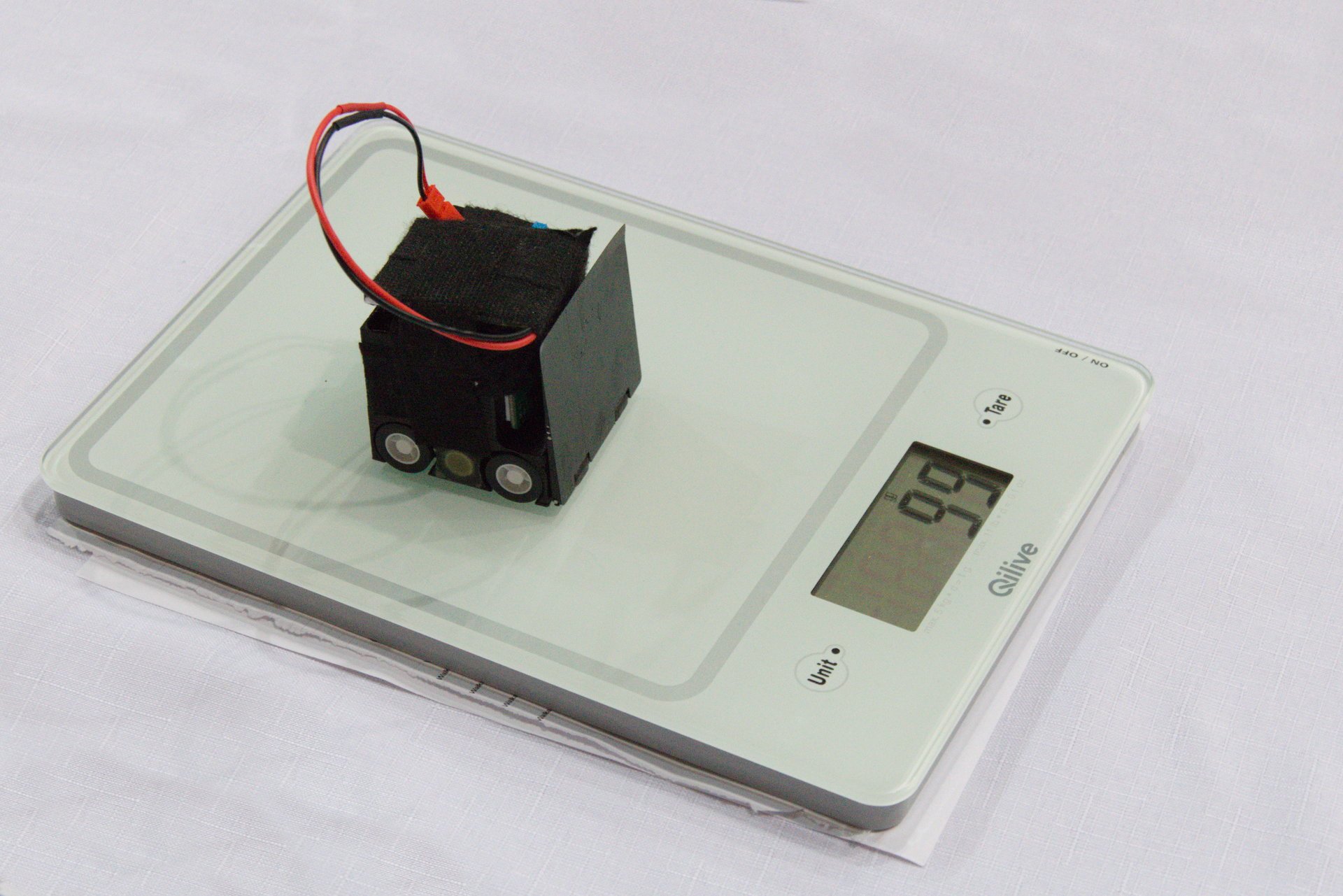
Zgodnie z nazwą ten robot nie miał powstać. Jego historia zaczyna się w maju 2019 roku. Został mi wtedy przyznany przez Wydział Elektroniki Mikrosystemów i Fotoniki Politechniki Wrocławskiej grant na realizację robota kategorii nanosumo. Postawiłem sobie jako deadline na pierwszy działający prototyp Robocomp 2019. Wtedy myślałem że to dużo czasu. Niestety koła zębate biurokracji wolne są, Digikey nie miało kluczowej części a na mój brak czasu i problemy z nim zarządzaniem już na łamach tego forum narzekałem. Złożyło się to na brak funkcjonalnej wersji czegokolwiek na tydzień przed konkursem. Na szczęście w zamówieniu było trochę modułów a w moich szufladach jeszcze więcej. No i druk 3d uratował dzień jak zawsze: Jako napęd robota posłużyły cztery silniki sub-micro 26:1. Cztery silniki dają sporą mechaniczną przewagę w *sumo ponieważ pozwalają na przeniesienie przez koła praktycznie całej masy robota, a jak wiadomo Td = µN. Do tego zamontowałem opadający pług który dociążyłem około połowy wysokości metalową ośką 1mm co podniosło jego środek ciężkości. Okazał się bardzo skuteczny, szczególnie przeciwko robotowi z stałym pługiem dość daleko od ziemi z którym walczyłem w półfinale. Aby ciężar wyniósł jak najbliżej 100g w robocie umieściłem około 30 nakrętek M5 bo akurat były pod ręką. Początkowo silnikami miał sterować chiński moduł opisywany jako mini-L298N do którego dokumentacja prawdopodobnie nie istnieje ale po tym jak nie zadziałał od ręki wymieniłem go na 2x Pololu DRV8838. Prawdopodobnie źle go podłączyłem (autopsja w planach) przez co na jednym silniku nie działała praca w tył. Zostało to "rozwiązane" programowo. Sercem robota było Arduno Pro Micro (wybrane ze względu na to że leżało pod ręką) zasilane przez przetwornicę step-up do USB poddaną subtelnej modyfikacji kombinerkami z pojedynczej celi LiPo (która zasilała też mostek H bezpośrednio). No i ostatecznie jedyna ciekawa rzecz w tym robocie - VL53L1X-SATEL - breakouty do świetnych czujników odległości TOF od ST. Zdążyłem tylko wstępnie ogarnąć ich możliwości ale wydają sioę bardzo obiecujące. Niestety zupełnie nie widziały robota przeciwnika (wydrukowanego 3D) w finale, przyczyny zostaną zbadane. Kod powstał w autobusie do Krakowa i strefie dla zawodników. Jest napisany w bardzo nieeleganckim Arduino C++. Jego logika składa się z 3 if-ów. Działa. W "najbliższym" czasie powinny się pojawić worklog do nanosumo bo tam planuję sporo ciekawsze rozwiązania jak customowe elastyczne PCB. Pewnie jeszcze tu wrócę i trochę poprawię.