Przeszukaj forum
Pokazywanie wyników dla tagów 'roboty mobilne'.
Znaleziono 2 wyniki
-

Mechanik TEAM - Szkolne Koło Robotyczne przy ZSM w Rzeszowie
MechanikTEAM opublikował temat w Koła Naukowe
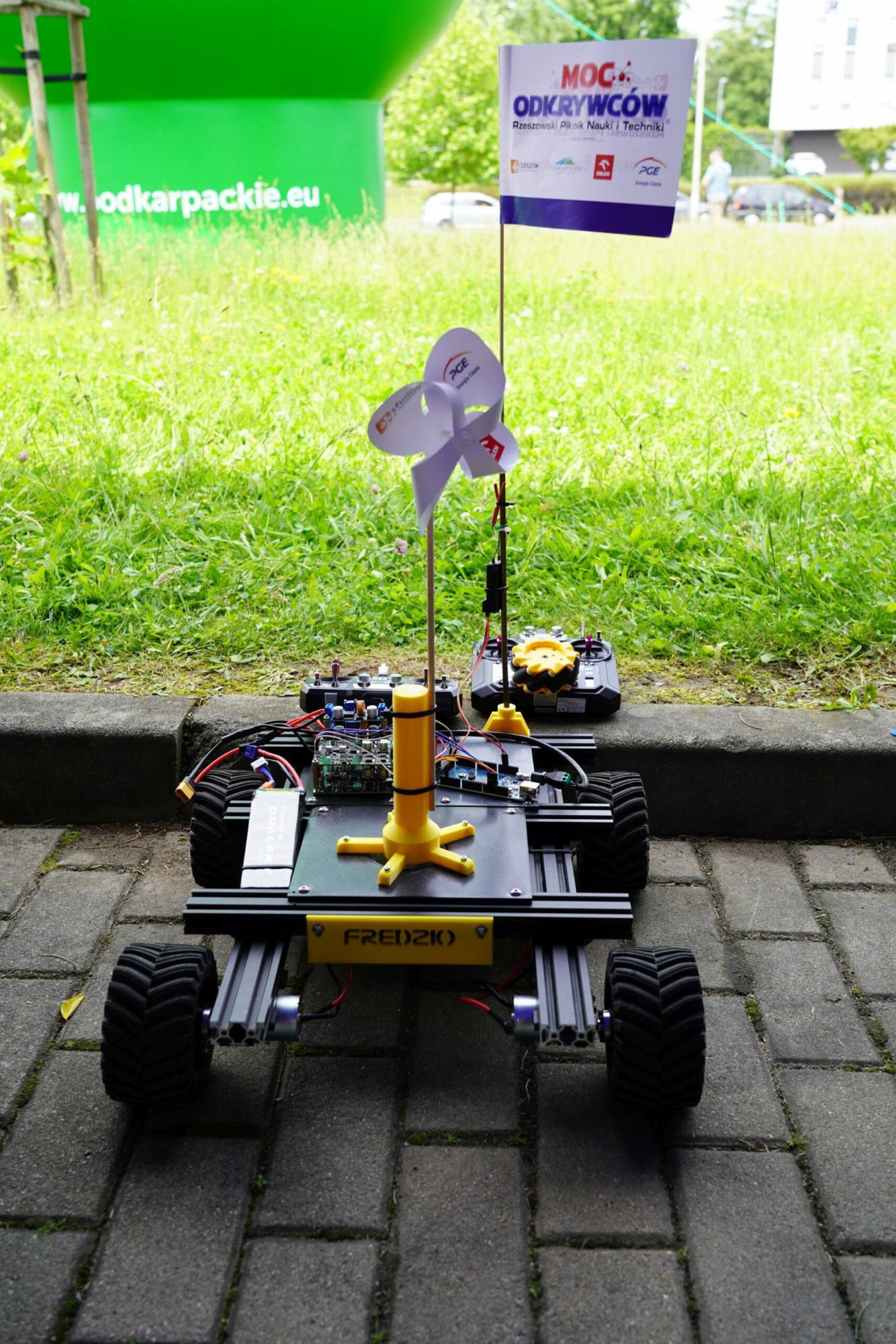
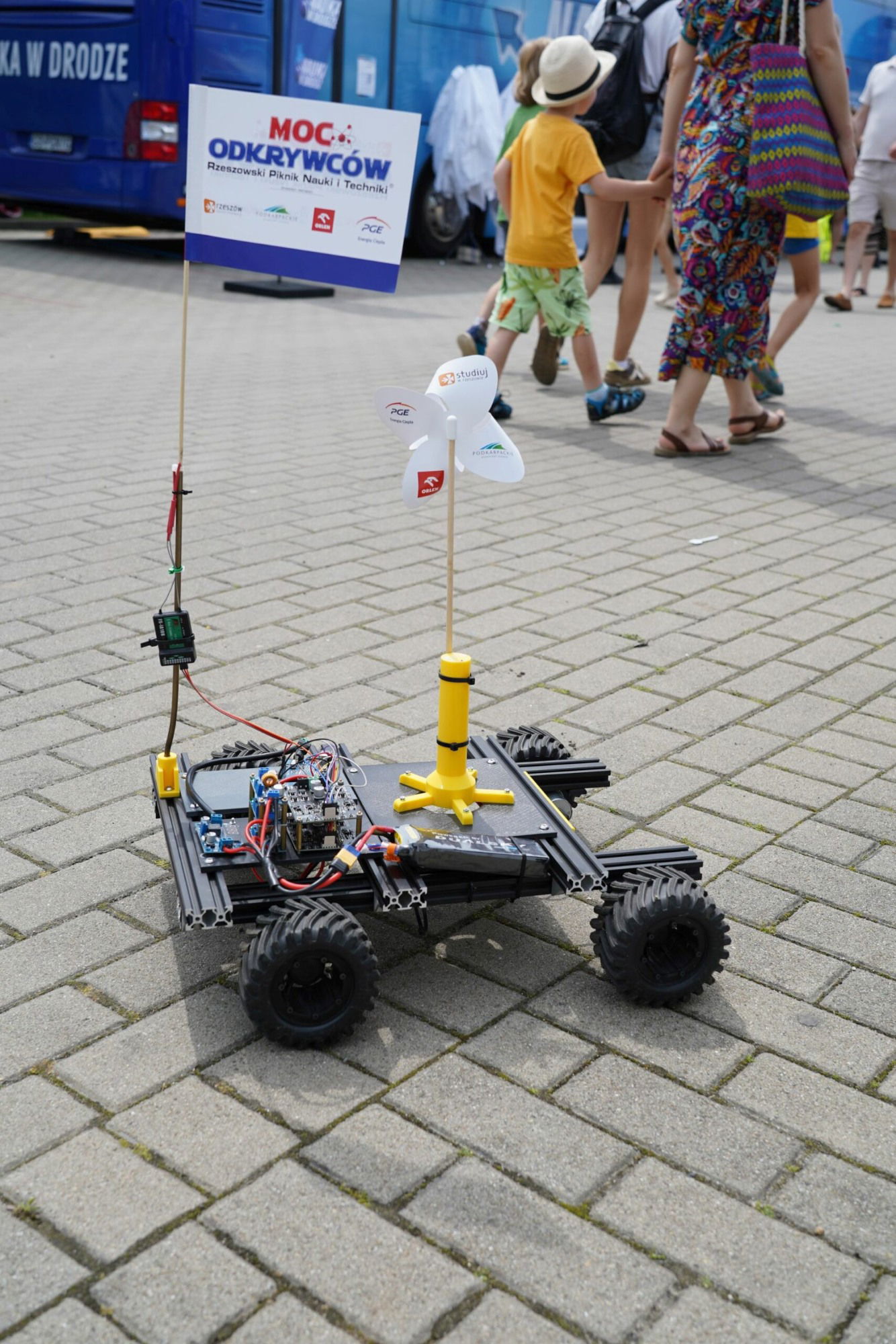
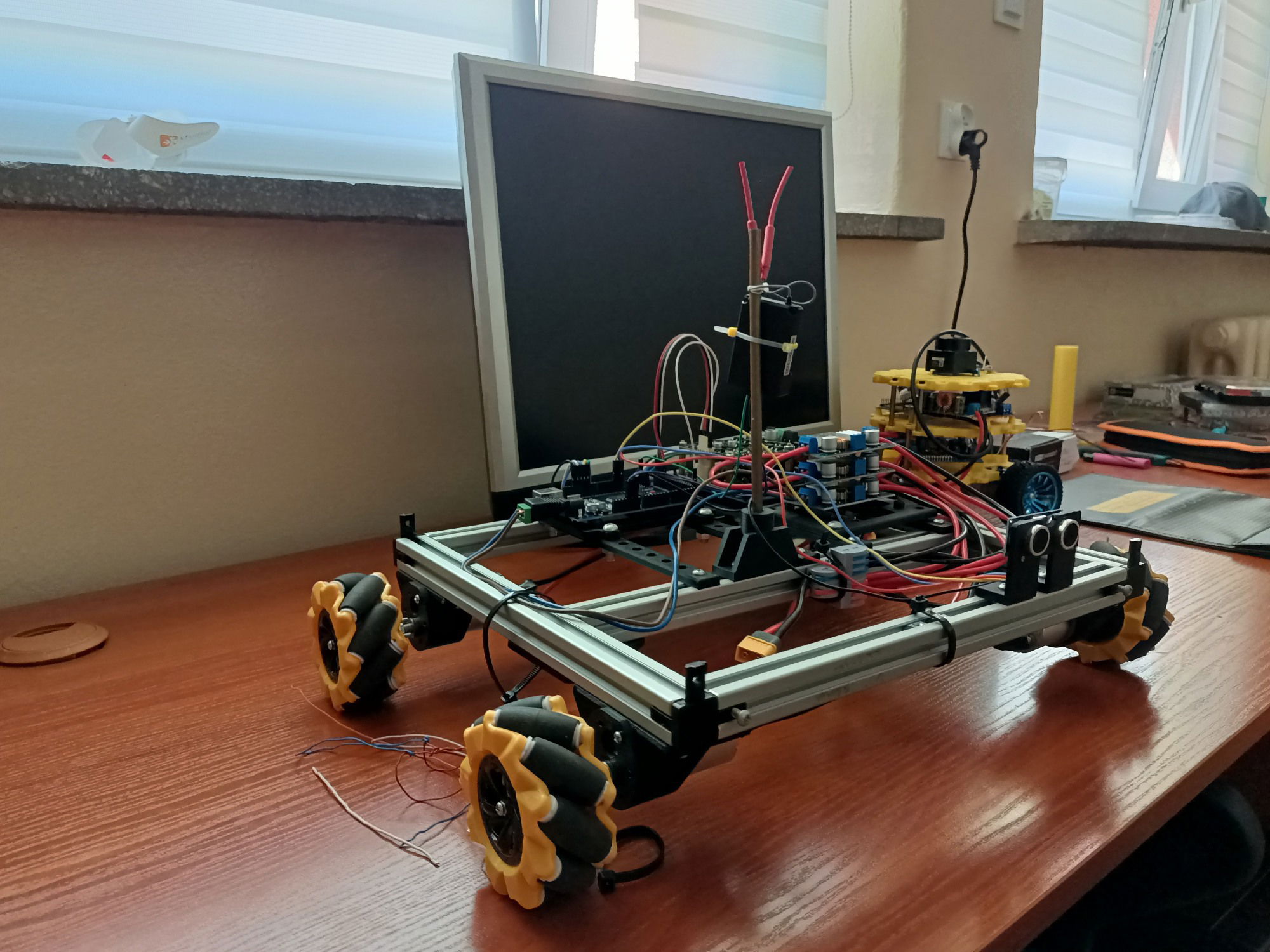
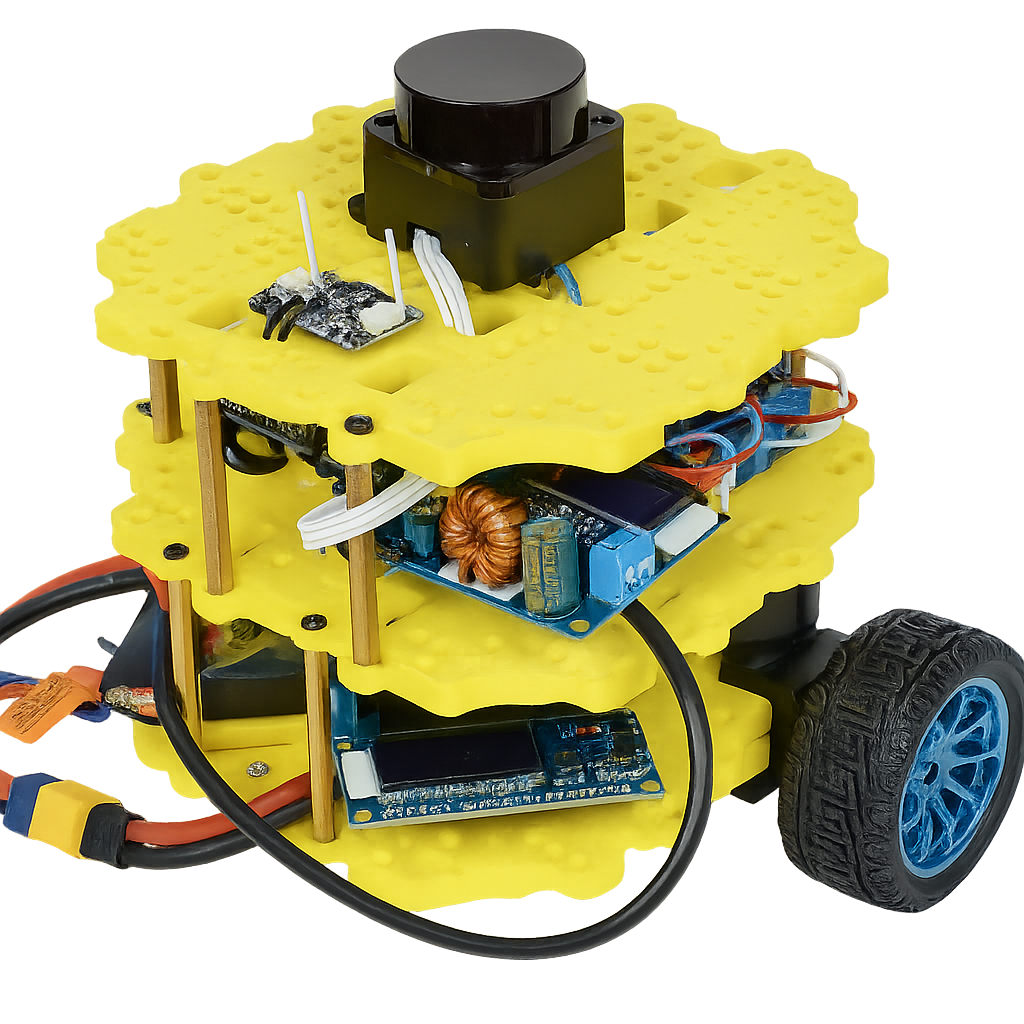
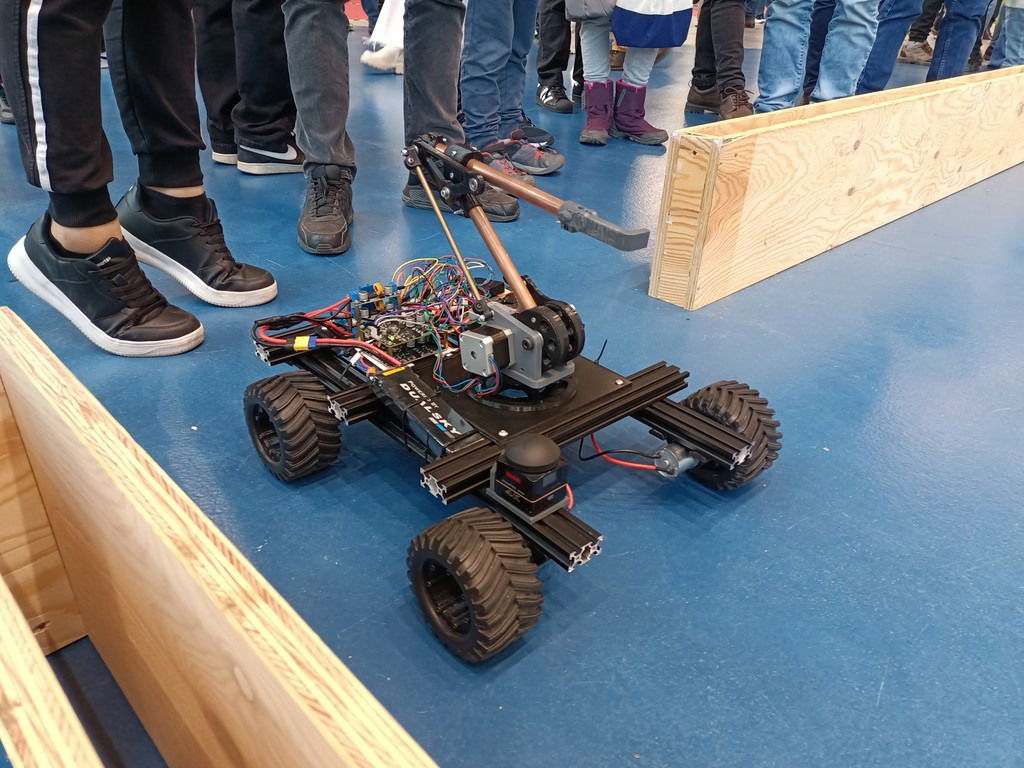
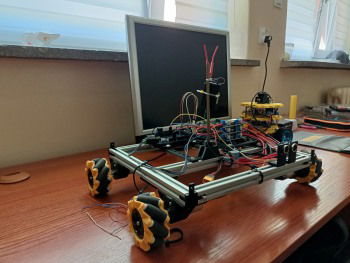
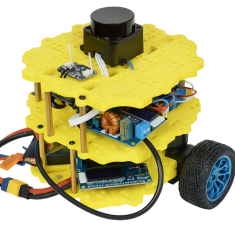
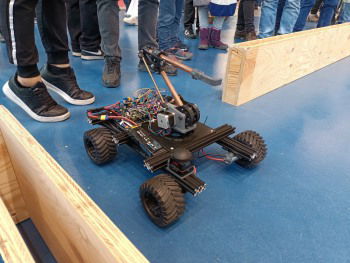
Cześć! Szkolne Koło Robotyczne „Mechanik TEAM” powstało na początku roku szkolnego 2024/2025 w Zespole Szkół Mechanicznych w Rzeszowie. Choć oficjalnie działa dopiero od niedawna, jego korzenie sięgają wcześniejszych działań uczniów szkoły. Zakładając konto na Forbocie chcemy podzielić się z Wami naszymi pomysłami, dokonaniami . Postaramy się przedstawić i zaprosić do śledzenia naszych poczynań. Logo Szkolnego Koła Robotycznego Mechanik TEAM Logo bynajmniej nie jest przypadkowe - to bardzo uproszczony szkic naszego pierwszego robota. O nas Jesteśmy grupą uczniów (aktualnie ok. 10 osób) uczęszczających do różnych klas Zespołu Szkół Mechanicznych w Rzeszowie. Łączy nas pasja do budowania robotów, elektroniki, mechaniki, projektowania 3D oraz dobrej zabawy. Działalność Uczestniczymy w konkursach, w których startują nasze roboty (lub w ramach nich są budowane) - np. X-Challenge 2024, "Naukolatek - nastoletni naukowiec" czy też I miejsce w IX edycji ogólnopolskiego Konkursu Młodych Inżynierów. Oczywiście bierzemy również udział w wydarzeniach promujących edukację i naukę - np. Moc Odkrywców 2025 czy w dniach otwartych naszej szkoły. Roboty Fredzio Nasza debiutancka konstrukcja — mobilny robot zdalnie sterowany zbudowany na bazie lekkich, ale wytrzymałych profili aluminiowych i napędzany czterema niezależnymi silnikami — miała swoją premierę podczas ogólnopolskich zawodów X-Challenge 2024 w kategorii Task Hunters. Choć nasz robot powstawał w zawrotnym tempie, przy bardzo ograniczonym budżecie i w warunkach dalekich od idealnych, postanowiliśmy podjąć wyzwanie. Budowa była pełna niespodzianek – od drobnych zwarć w układzie elektrycznym, przez poważną awarię w dniu zawodów, aż po spektakularną wywrotkę podczas próbnego przejazdu i złamane ramię w trakcie jednej z konkurencji. Mimo tych przeciwności nasza konstrukcja nie tylko wystartowała, ale również zajęła 10. miejsce w stawce kilkudziesięciu zespołów z całej Polski, co uważamy za ogromny sukces. Już teraz pracujemy nad nową, poprawioną wersją na kolejne zawody - powstaje Fredzio 2.0. Ragnar Pod względem budowy, robot bazuje na solidnym i lekkim szkielecie wykonanym z profili aluminiowych, co zapewnia zarówno wytrzymałość, jak i elastyczność w dalszej rozbudowie. Napędzany jest przez cztery niezależne silniki, z których każdy steruje osobnym kołem typu omniwheel – to właśnie one czynią tę konstrukcję wyjątkową. Zastosowanie omniwheels umożliwia robotowi pełną swobodę ruchu: może poruszać się nie tylko klasycznie – do przodu i do tyłu – ale także w bok, po skosie, a nawet obracać się wokół własnej osi. Co więcej, dzięki odpowiedniemu algorytmowi sterowania możliwe jest przesunięcie osi obrotu robota poza jego fizyczną podstawę – nawet o 30 cm. To oznacza, że maszyna może np. precyzyjnie okrążać obiekt znajdujący się przed nią bez potrzeby zmiany orientacji całej konstrukcji. Podobnie jak nasz wcześniejszy projekt – Fredzio – robot ten może być sterowany zdalnie, jednak tutaj poszliśmy o krok dalej. Dzięki zastosowaniu dodatkowych sensorów, możliwa jest również częściowa autonomia. Wyposażyliśmy go w ultradźwiękowy czujnik odległości oraz laserowy dalmierz, który pozwala wykrywać przeszkody nawet w promieniu do 12 metrów. W połączeniu z prostym, ale skutecznym algorytmem omijania przeszkód, robot potrafi samodzielnie analizować otoczenie i podejmować decyzje, np. o zmianie kierunku jazdy. Robot Autonomiczny Choć na pierwszy rzut oka ten niewielki robot może przypominać dziecięcą zabawkę, jego wnętrze skrywa zaskakująco zaawansowaną technologię. To efekt naszej pracy w ramach konkursu „Naukolatek” oraz projektu badawczego „Zastosowanie sztucznej inteligencji w nawigacji robotów”, którego celem było stworzenie robota zdolnego do samodzielnego poruszania się w nieznanym środowisku przy wykorzystaniu nowoczesnych algorytmów lokalizacji i planowania trasy. Pod tą niepozorną obudową znajduje się zestaw przemyślanych rozwiązań sprzętowych i programistycznych. Wyposażyliśmy robota m.in. w enkodery, czujnik położenia oraz LIDAR – system umożliwiający precyzyjne skanowanie otoczenia przy pomocy światła laserowego. Po stronie oprogramowania zdecydowaliśmy się na wykorzystanie ROS2 (Robot Operating System 2) – otwartoźródłowego frameworka powszechnie stosowanego w badaniach nad robotyką mobilną. Dzięki połączeniu danych z LIDAR-u i enkoderów możliwe było wdrożenie technologii SLAM (Simultaneous Localization and Mapping), która pozwala robotowi jednocześnie mapować otoczenie i określać własną pozycję w przestrzeni. W efekcie robot jest w stanie autonomicznie poruszać się po nieznanym terenie, wykrywać i omijać przeszkody, a także planować trasę do zadanego punktu z użyciem algorytmu A*. Pracownia W tym roku udało nam się pozyskać i wyremontować dwa pomieszczenia, w których ma teraz siedzibę nasze Koło. Są już meble, stoły, oświetlenie, ale wciąż urządzamy naszą pracownię. Kontakt Wszystkich zainteresowanych naszą działalnością zapraszamy do kontaktu - napisz wiadomość prywatną. WWW: mechanik.team Email: [email protected]



-
Cześć, jestem tutaj nowy. Zbieram obecnie materiały odnośnie mojej pracy dyplomowej związanej z analizą modeli współpracy robotów mobilnych. Czy ktoś z Was pisał lub interesuje się tym zagadnieniem i zna jakieś ciekawe materiały na ten temat? Byłbym bardzo wdzięczny za jakiekolwiek wskazówki. Pozdrawiam