Przeszukaj forum
Pokazywanie wyników dla tagów 'Koło Naukowe'.
Znaleziono 4 wyniki
-
Cześć! Jesteśmy świeżo powstałym kołem naukowym działającym na Politechnice Poznańskiej, założonym w celu zrzeszania miłośników mechaniki, elektroniki, robotyki i każdego, kogo interesują roboty w każdym tego słowa znaczeniu. Naszymi obecnymi projektami są rozwiązania, w których staramy się łączyć wszystkie te dziedziny w praktyce. Aktualnie na warsztacie mamy dwa główne przedsięwzięcia: 1. Wielozadaniowa Platforma Modułowa. To nasz projekt flagowy. Tworzymy od zera autorskiego robota opartego na koncepcji łatwo wymiennych modułów. Dzięki jednolitemu systemowi złączy możemy błyskawicznie zmieniać konfigurację sprzętu w zależności od potrzeb. 2. Mechatroniczna Tiara Przydziału. Zbudowaliśmy interaktywne urządzenie, które pomaga niezdecydowanym kandydatom podjąć tę trudną decyzję i (po odpowiedniej "analizie") automatycznie przydziela ich na jeden z 4 kierunków na naszym Wydziale Inżynierii Mechanicznej (WIM). Jako że dopiero się rozkręcamy, postanowiliśmy założyć konto na Forbocie, żeby czerpać inspirację od bardziej doświadczonych twórców i od czasu do czasu pochwalić się naszymi postępami. Jesteśmy bardzo ciekawi Waszych opinii – zwłaszcza na temat koncepcji naszej platformy modułowej! Będziemy wdzięczni za wszelkie rady, konstruktywną krytykę i wymianę doświadczeń. Pozdrawiamy, Ekipa Robo Forge Tutaj znajdziecie więcej informacji o nas: https://roboforgepp.my.canva.site/
-
- 1
-

-
- Koło Naukowe
- mechatronika
- (i 2 więcej)
-
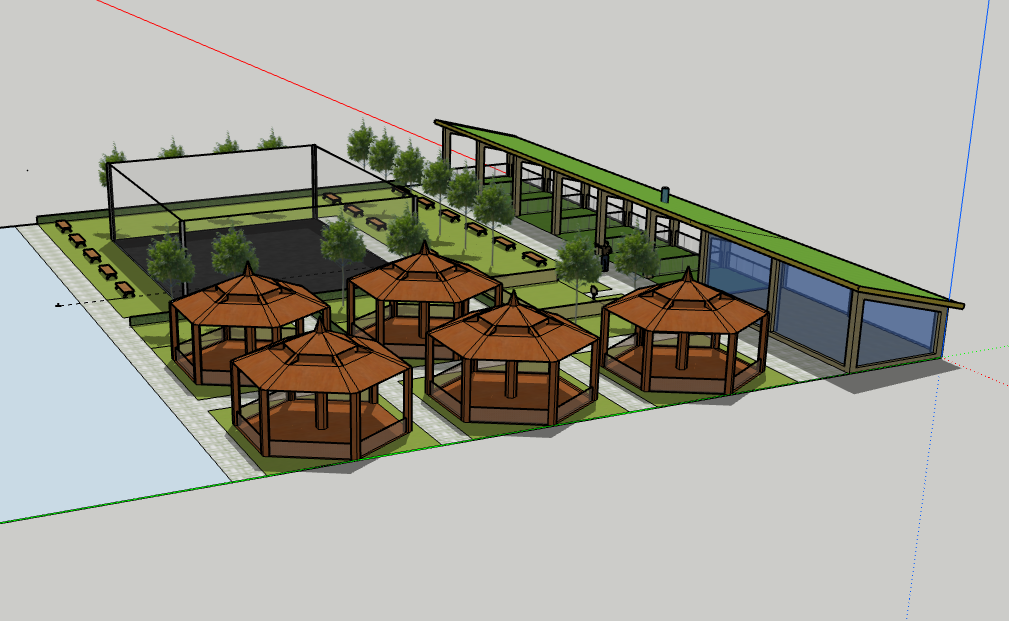
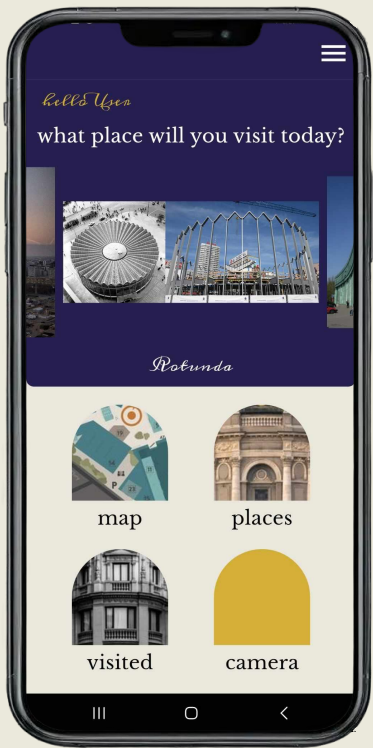
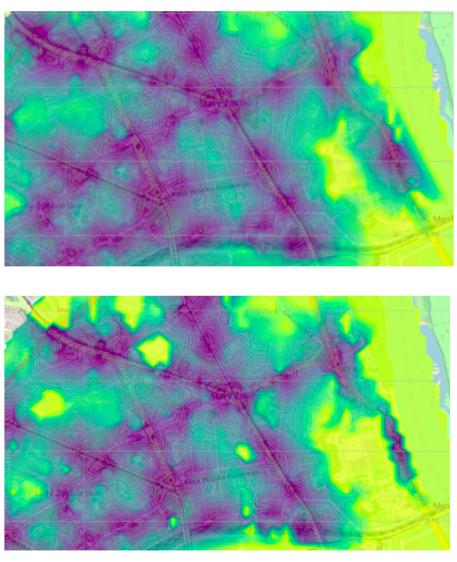
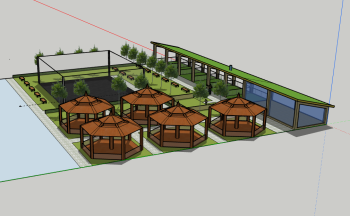
 Cześć! Jesteśmy międzywydziałowym kołem naukowym z Politechniki Warszawskiej zajmującym się tematyką inteligentnych miast. Istniejemy od 2016 r. i zrzeszamy ok. 40 osób z ~10 wydziałów PW. Logo MKN Smart City Pracujemy w interdyscyplinarnych zespołach realizując projekty związane m.in. z użyciem IoT w miastach, zrównoważonym transportem, zagospodarowaniem przestrzennym, informatyzacją miasta i otwartymi danymi. Realizujemy projekty hardwareowe, programistyczne, społeczne, naukowe i popularyzujące naukę. Bierzemy udział w różnych targach i wydarzeniach oraz organizujemy własny cykl wydarzeń popularyzujących ideę smart cities we współpracy z międzynarodowymi partnerami. Przykładowe projekty: Hydroponika Projekt modułowej szklarni do aeroponicznej uprawy roślin w miastach w pełni zautomatyzowany sposób. Jest ona wyposażona w czujniki IoT, które pozwolą na precyzyjne kontrolowanie warunków atmosferycznych, dzięki czemu można w niej uprawiać wiele gatunków roślin nietypowych dla klimatu miejsca, w którym urządzenie zostanie postawione. Projekt skupia się na zagadnieniach zrównoważonego rolnictwa, aeroponicznej uprawy roślin i zieleni w miastach. ARchitecture Aplikacja mobilna, z wykorzystaniem Fluttera, wyświetlająca w rozszerzonej rzeczywistości modele historycznych zabudowań. Celem projektu jest udostępnienie zainteresowanym osobom prostego narzędzia do ujrzenia dawnego wyglądu i kształtu znanego im na co dzień otoczenia. Projekt obejmuje techniki odwzorowywania budynków, nakładanie zabytkowej warstwy na istniejące modele i wykorzystanie AR. Makieta Projekt wywodzący się z ogólnostudenckiej inicjatywy na rzecz zamiany betonowego parkingu w atrakcyjną przestrzeń publiczną na kampusie PW. Celem działań jest stworzenie makiety modelowej oraz wykazanie, że nawet ograniczoną przestrzeń parkingu między dwoma Wydziałami PW można przekształcić w nowe miejsce do odpoczynku i integracji, bez konieczności całkowitej rezygnacji z jego dotychczasowej funkcji. Bariery przestrzenne Badanie trudności w codziennym poruszaniu się po mieście, z jakimi mierzą się różne grupy społeczne. Projekt rozwija aplikację opartą na open data, która analizuje rozmieszczenie barier fizycznych, wyznacza trasy dostosowane do potrzeb i wizualizuje dostępność architektoniczną. Laboratorium Smart Domu i Miasta Opracowanie i uruchomienie Laboratorium Smart Domu i Miasta w formie zestawu przenośnych stanowisk eksperymentalnych. Będzie ono dostępne dla studentów w ramach realizacji przedmiotów obowiązkowych i obieralnych oraz prac dyplomowych i badawczych. Studenci otrzymają możliwość zapoznania się z coraz popularniejszymi technologiami z kategorii inteligentnego domu i inteligentnego miasta, niezbędnymi do ich wdrożenia protokołami komunikacyjnymi oraz wykorzystywanymi w tym celu czujnikami i bramkami. Smart Cities with AFK We wrześniu 2024 r. nasze Koło rozpoczęło współpracę z Austriackim Forum Kultury przy ambasadzie Austrii. Wspólnie zainicjowaliśmy serię wydarzeń popularyzujących ideę inteligentnego projektowania przestrzeni, prezentując rozwiązania stosowane w Warszawie i Wiedniu. Możliwości dla studentów Oferujemy możliwość pracy w interdyscyplinarnych zespołach, dostęp do pokoju koła z kącikiem majsterkowicza i chill strefą oraz dużo spotkań integracyjnych i miłą, kameralną atmosferę. Jeśli interesujesz się tematyką inteligentnych miast i studiujesz na Politechnice warszawskiej to zapraszamy do dołączenia! Kontakt Więcej informacji o naszym kole można znaleźć na Facebooku oraz Instagramie.
Cześć! Jesteśmy międzywydziałowym kołem naukowym z Politechniki Warszawskiej zajmującym się tematyką inteligentnych miast. Istniejemy od 2016 r. i zrzeszamy ok. 40 osób z ~10 wydziałów PW. Logo MKN Smart City Pracujemy w interdyscyplinarnych zespołach realizując projekty związane m.in. z użyciem IoT w miastach, zrównoważonym transportem, zagospodarowaniem przestrzennym, informatyzacją miasta i otwartymi danymi. Realizujemy projekty hardwareowe, programistyczne, społeczne, naukowe i popularyzujące naukę. Bierzemy udział w różnych targach i wydarzeniach oraz organizujemy własny cykl wydarzeń popularyzujących ideę smart cities we współpracy z międzynarodowymi partnerami. Przykładowe projekty: Hydroponika Projekt modułowej szklarni do aeroponicznej uprawy roślin w miastach w pełni zautomatyzowany sposób. Jest ona wyposażona w czujniki IoT, które pozwolą na precyzyjne kontrolowanie warunków atmosferycznych, dzięki czemu można w niej uprawiać wiele gatunków roślin nietypowych dla klimatu miejsca, w którym urządzenie zostanie postawione. Projekt skupia się na zagadnieniach zrównoważonego rolnictwa, aeroponicznej uprawy roślin i zieleni w miastach. ARchitecture Aplikacja mobilna, z wykorzystaniem Fluttera, wyświetlająca w rozszerzonej rzeczywistości modele historycznych zabudowań. Celem projektu jest udostępnienie zainteresowanym osobom prostego narzędzia do ujrzenia dawnego wyglądu i kształtu znanego im na co dzień otoczenia. Projekt obejmuje techniki odwzorowywania budynków, nakładanie zabytkowej warstwy na istniejące modele i wykorzystanie AR. Makieta Projekt wywodzący się z ogólnostudenckiej inicjatywy na rzecz zamiany betonowego parkingu w atrakcyjną przestrzeń publiczną na kampusie PW. Celem działań jest stworzenie makiety modelowej oraz wykazanie, że nawet ograniczoną przestrzeń parkingu między dwoma Wydziałami PW można przekształcić w nowe miejsce do odpoczynku i integracji, bez konieczności całkowitej rezygnacji z jego dotychczasowej funkcji. Bariery przestrzenne Badanie trudności w codziennym poruszaniu się po mieście, z jakimi mierzą się różne grupy społeczne. Projekt rozwija aplikację opartą na open data, która analizuje rozmieszczenie barier fizycznych, wyznacza trasy dostosowane do potrzeb i wizualizuje dostępność architektoniczną. Laboratorium Smart Domu i Miasta Opracowanie i uruchomienie Laboratorium Smart Domu i Miasta w formie zestawu przenośnych stanowisk eksperymentalnych. Będzie ono dostępne dla studentów w ramach realizacji przedmiotów obowiązkowych i obieralnych oraz prac dyplomowych i badawczych. Studenci otrzymają możliwość zapoznania się z coraz popularniejszymi technologiami z kategorii inteligentnego domu i inteligentnego miasta, niezbędnymi do ich wdrożenia protokołami komunikacyjnymi oraz wykorzystywanymi w tym celu czujnikami i bramkami. Smart Cities with AFK We wrześniu 2024 r. nasze Koło rozpoczęło współpracę z Austriackim Forum Kultury przy ambasadzie Austrii. Wspólnie zainicjowaliśmy serię wydarzeń popularyzujących ideę inteligentnego projektowania przestrzeni, prezentując rozwiązania stosowane w Warszawie i Wiedniu. Możliwości dla studentów Oferujemy możliwość pracy w interdyscyplinarnych zespołach, dostęp do pokoju koła z kącikiem majsterkowicza i chill strefą oraz dużo spotkań integracyjnych i miłą, kameralną atmosferę. Jeśli interesujesz się tematyką inteligentnych miast i studiujesz na Politechnice warszawskiej to zapraszamy do dołączenia! Kontakt Więcej informacji o naszym kole można znaleźć na Facebooku oraz Instagramie.




-
- 1
-
-
- Koło Naukowe
- IoT
- (i 1 więcej)
-
Cześć! Jesteśmy Kołem Naukowym Absolute Edge działającym przy Wydziale Mechatroniki Politechniki Warszawskiej. Realizujemy projekty z zakresu bezzałogowej robotyki mobilnej. Choć nasze koło powstało nieco ponad 8 miesięcy temu - to już według wielu daliśmy się we znaki zarówno lokalnie na Politechnice Warszawskiej, jak i wśród innych studenckich zespołów dronowych. Budujemy działające konstrukcje, tworzymy oprogramowanie i testujemy rozwiązania w realnych warunkach — od prototypów po gotowe systemy. Dzielimy się technicznie na zespoły: programistyczny, mechaniczny oraz elektroniczny. Pracujemy w małych, zwinnych podzespołach, co pozwala szybko testować rozwiązania. Jesteśmy wszechstronnie aktywnym kołem, które mocno się rozwija. Naszymi celami przewodnimi jest osiąganie sukcesów w olimpiadach krajowych oraz międzynarodowych. Wierzymy, że chęć działania, która nas łączy pozwoli nam na osiąganie coraz to wyższych pułapów! Nasze projekty i dotychczasowa aktywność: We wrześniu 2025r. wzięliśmy udział w konkurencji Droniada Hydrolab, gdzie nasza konstrukcja skutecznie i powtarzalnie pobrała próbkę wody i przetransportowała ją do labolatorium - w najkrótszym czasie. Dzięki temu zajęliśmy 2 miejsce w tymże konkursie. Projekt ten chcemy stale rozwijać, by finalnie mógł stać się mobilną stacją badawczą, mierzącą parametry wody. Wrzesień 2025 - drugie miejsce w konkurencji Droniada Hydrolab W październiku 2025 wzięliśmy udział forum gospodarczym - "Krynica Forum", gdzie uczestniczyliśmy w wielu panelach dotyczących prowadzenia biznesu, podatków, prezentacji, konkurencji rynkowej, bezpieczeństwa narodowego. Wydarzenie to pozwoliło nam zebrać dużo wartościowych kontaktów. Ponadto odnieśliśmy sukces w konkursie inicjatyw studenckich, gdzie zdobyliśmy 3 miejsce prezentując pomysł na przywrócenie krajowej zdolności produkcji dronów — odpowiedź na wyzwanie uzależnienia od zagranicznych łańcuchów dostaw. Październik 2025 - Krynica Forum 7 i 8 października można nas było zobaczyć na Targach Kół Naukowych "KONIK PW", gdzie nasze stoisko było mocno widoczne, od razu po wejściu do Gmachu Głównego. Prezentowaliśmy tam nasze projekty - te które się już udało skończyć, ale także te, które są obecnie tworzone. W rekrutacji do naszego koła zgłosiło się na początkowym etapie już ponad 30 osób, co znacznie poprawi z czasem nasze możliwości organizacyjne. Październik 2025 - Targi Kół Naukowych "KONIK PW" W listopadzie uczestniczyliśmy w międzynarodowych Targach przetwórstwa oraz druku 3D - "Formnext 2025" odbywających się we Frankfurcie nad Menem. Na targach zobaczyliśmy najnowsze technologie z branży addytywnej i przetwórstwa tworzyw. Porozmawialiśmy z wieloma wiodącymi firmami z branży, dzięki czemu będziemy mieli współprace i wsparcia rzeczowe dla koła. Listopad 2025 - targi Formnext Przyszłe projekty zapowiadają się naprawdę ambitnie! Już teraz przygotowywujemy się do zawodów międzynarodowych: 1) SUAS - dronów autonomicznych 2) UAS - dronów transportowych A także w większej ilości konkurencji krajowej Droniady! W obecnej chwili pracujemy nad: - projektem uniwersalnej stacji naziemnej do dronów - dronem transportowym o udźwigu powyżej 20 kg - dronem o zastosowaniu inspekcyjnym/patrolowym z wydłużonym czasem lotu - powyżej 75 min. - dronem "matką" przenoszącym małe drony beacony. Kontakt: email: [email protected] Instagram: https://www.instagram.com/knabsoluteedge/ Facebook: https://www.facebook.com/profile.php?id=61574625725432 lokalizacja: sala 727, Wydział Mechatroniki Politechniki Warszawskiej







-
- 2
-
-
- Koło Naukowe
- koła
- (i 3 więcej)
-

Mechanik TEAM - Szkolne Koło Robotyczne przy ZSM w Rzeszowie
MechanikTEAM opublikował temat w Koła Naukowe
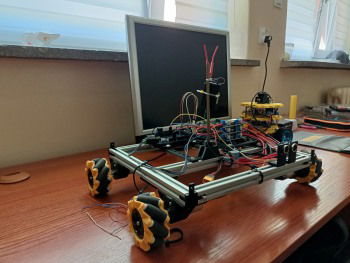
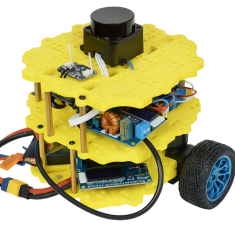
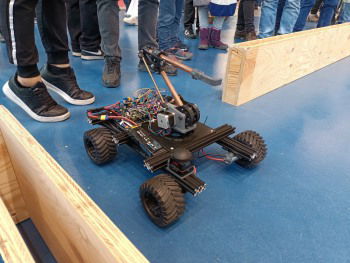
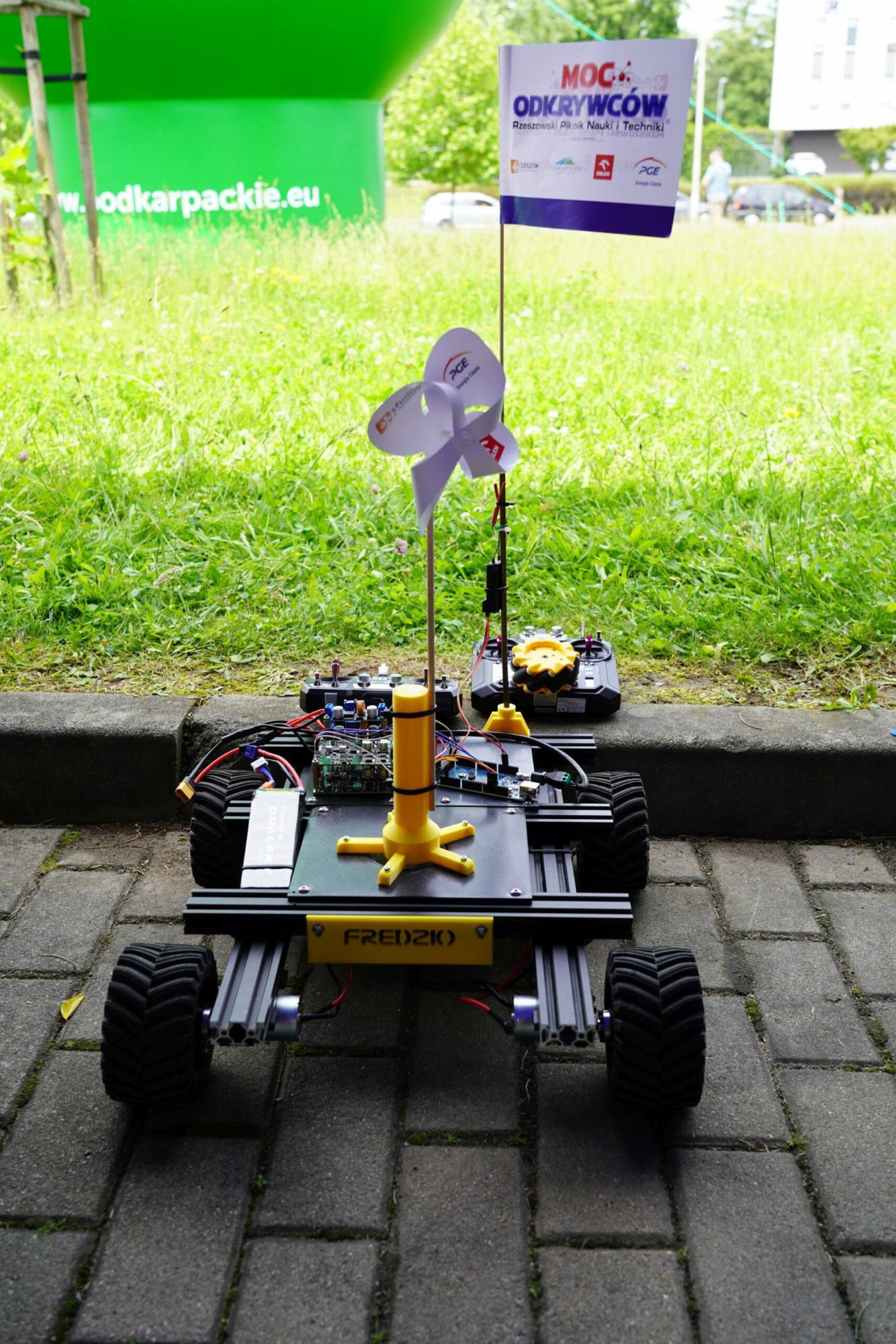
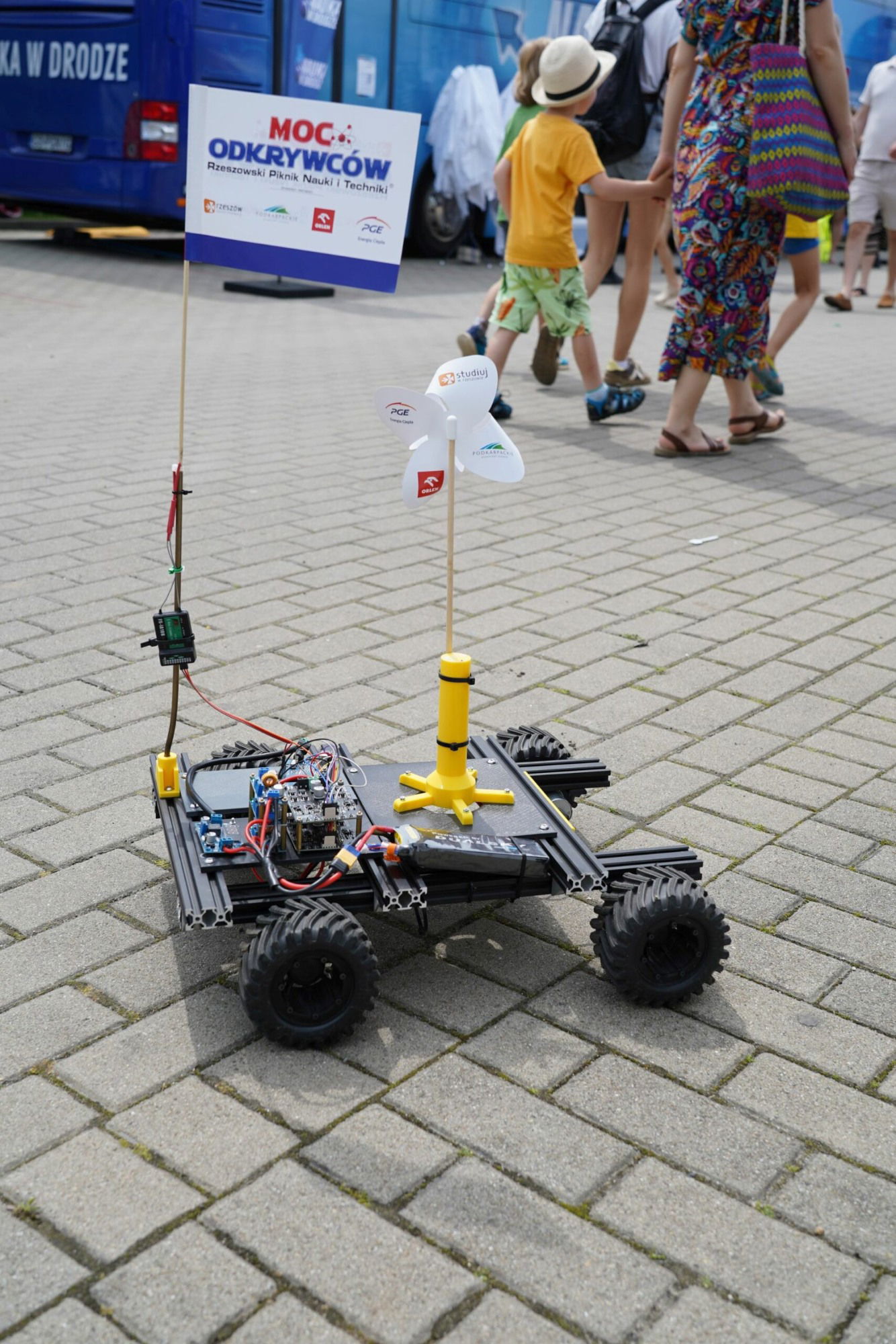
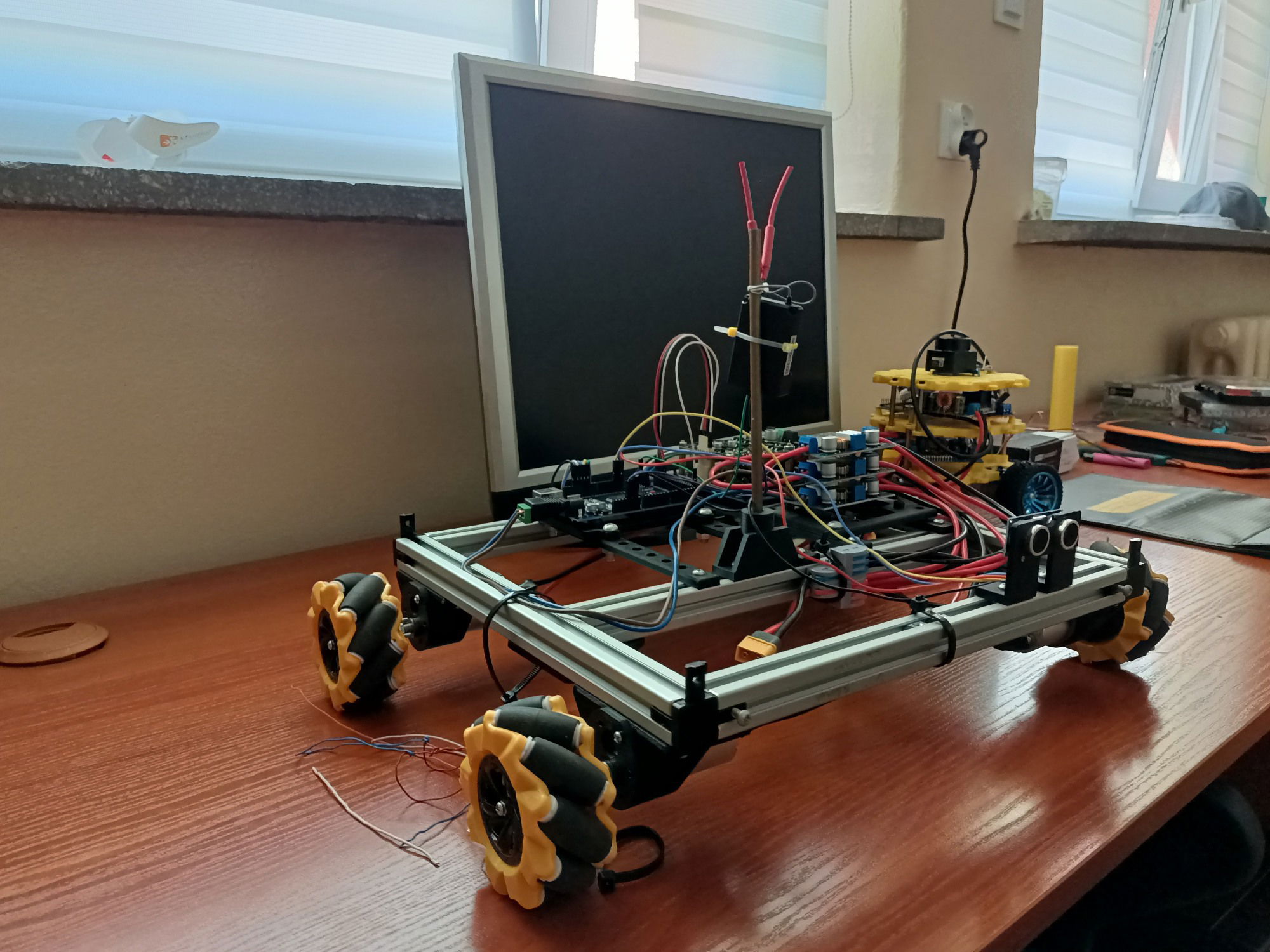
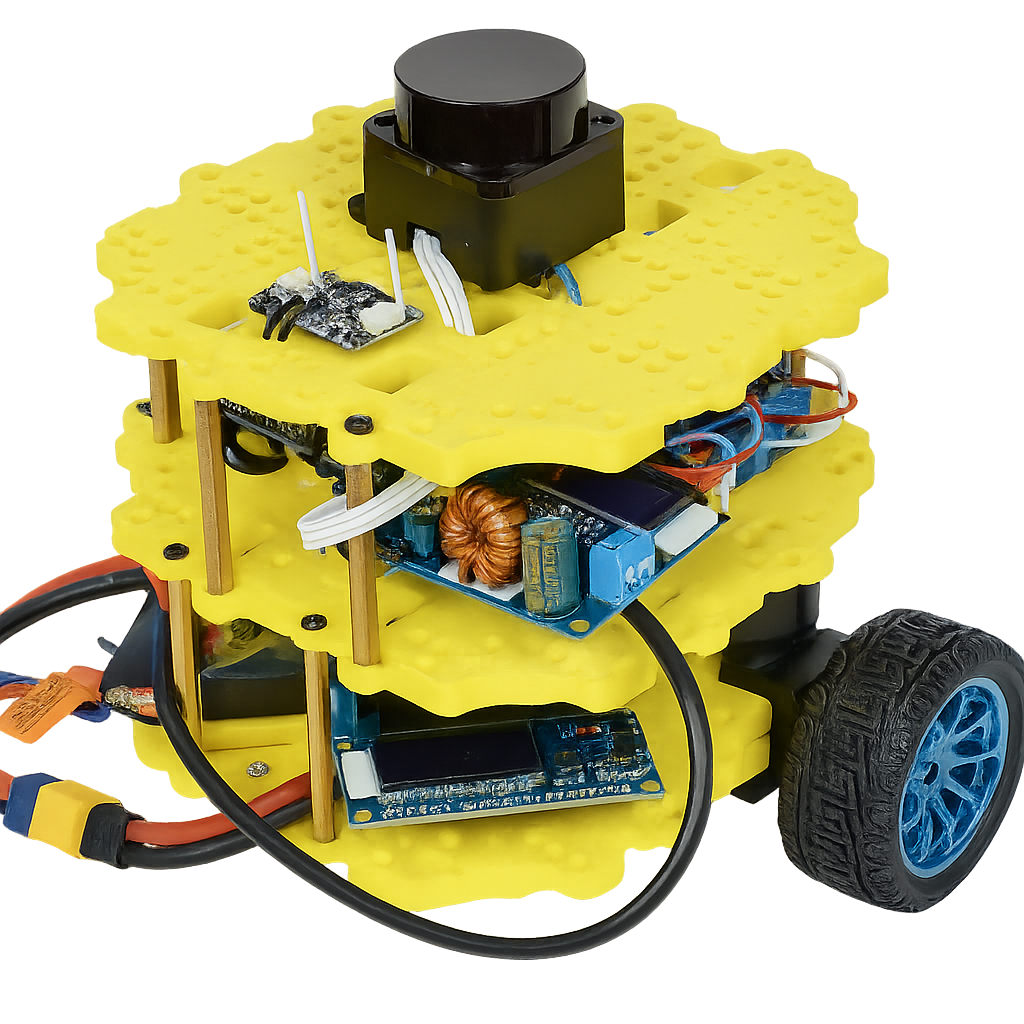
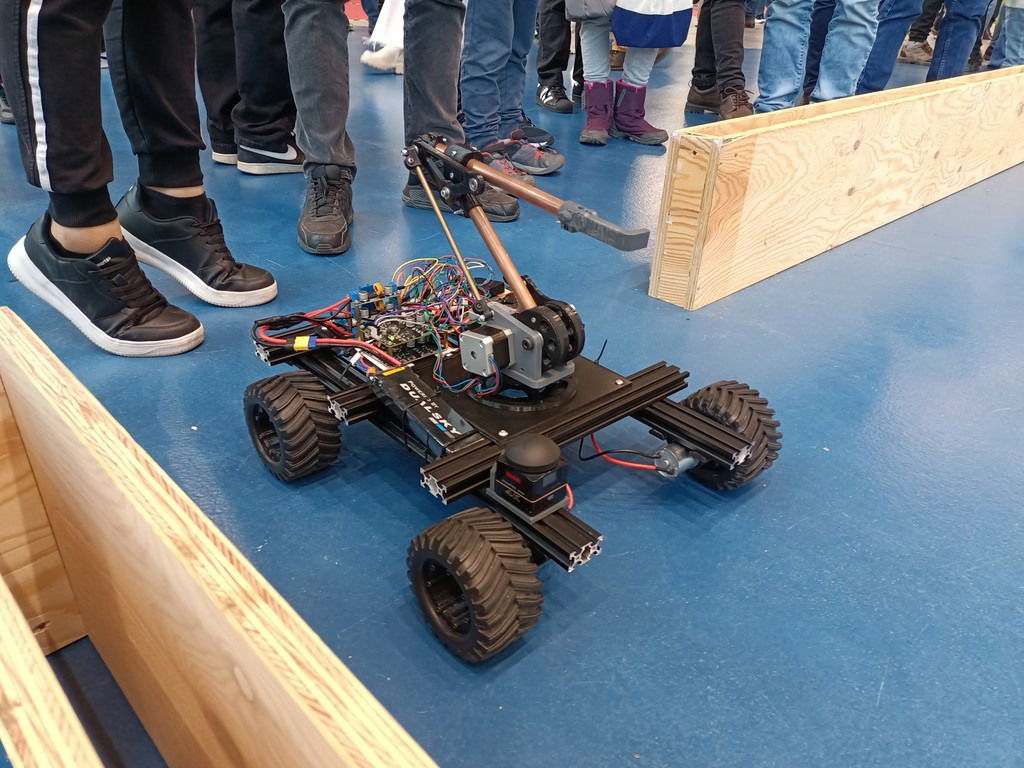
Cześć! Szkolne Koło Robotyczne „Mechanik TEAM” powstało na początku roku szkolnego 2024/2025 w Zespole Szkół Mechanicznych w Rzeszowie. Choć oficjalnie działa dopiero od niedawna, jego korzenie sięgają wcześniejszych działań uczniów szkoły. Zakładając konto na Forbocie chcemy podzielić się z Wami naszymi pomysłami, dokonaniami . Postaramy się przedstawić i zaprosić do śledzenia naszych poczynań. Logo Szkolnego Koła Robotycznego Mechanik TEAM Logo bynajmniej nie jest przypadkowe - to bardzo uproszczony szkic naszego pierwszego robota. O nas Jesteśmy grupą uczniów (aktualnie ok. 10 osób) uczęszczających do różnych klas Zespołu Szkół Mechanicznych w Rzeszowie. Łączy nas pasja do budowania robotów, elektroniki, mechaniki, projektowania 3D oraz dobrej zabawy. Działalność Uczestniczymy w konkursach, w których startują nasze roboty (lub w ramach nich są budowane) - np. X-Challenge 2024, "Naukolatek - nastoletni naukowiec" czy też I miejsce w IX edycji ogólnopolskiego Konkursu Młodych Inżynierów. Oczywiście bierzemy również udział w wydarzeniach promujących edukację i naukę - np. Moc Odkrywców 2025 czy w dniach otwartych naszej szkoły. Roboty Fredzio Nasza debiutancka konstrukcja — mobilny robot zdalnie sterowany zbudowany na bazie lekkich, ale wytrzymałych profili aluminiowych i napędzany czterema niezależnymi silnikami — miała swoją premierę podczas ogólnopolskich zawodów X-Challenge 2024 w kategorii Task Hunters. Choć nasz robot powstawał w zawrotnym tempie, przy bardzo ograniczonym budżecie i w warunkach dalekich od idealnych, postanowiliśmy podjąć wyzwanie. Budowa była pełna niespodzianek – od drobnych zwarć w układzie elektrycznym, przez poważną awarię w dniu zawodów, aż po spektakularną wywrotkę podczas próbnego przejazdu i złamane ramię w trakcie jednej z konkurencji. Mimo tych przeciwności nasza konstrukcja nie tylko wystartowała, ale również zajęła 10. miejsce w stawce kilkudziesięciu zespołów z całej Polski, co uważamy za ogromny sukces. Już teraz pracujemy nad nową, poprawioną wersją na kolejne zawody - powstaje Fredzio 2.0. Ragnar Pod względem budowy, robot bazuje na solidnym i lekkim szkielecie wykonanym z profili aluminiowych, co zapewnia zarówno wytrzymałość, jak i elastyczność w dalszej rozbudowie. Napędzany jest przez cztery niezależne silniki, z których każdy steruje osobnym kołem typu omniwheel – to właśnie one czynią tę konstrukcję wyjątkową. Zastosowanie omniwheels umożliwia robotowi pełną swobodę ruchu: może poruszać się nie tylko klasycznie – do przodu i do tyłu – ale także w bok, po skosie, a nawet obracać się wokół własnej osi. Co więcej, dzięki odpowiedniemu algorytmowi sterowania możliwe jest przesunięcie osi obrotu robota poza jego fizyczną podstawę – nawet o 30 cm. To oznacza, że maszyna może np. precyzyjnie okrążać obiekt znajdujący się przed nią bez potrzeby zmiany orientacji całej konstrukcji. Podobnie jak nasz wcześniejszy projekt – Fredzio – robot ten może być sterowany zdalnie, jednak tutaj poszliśmy o krok dalej. Dzięki zastosowaniu dodatkowych sensorów, możliwa jest również częściowa autonomia. Wyposażyliśmy go w ultradźwiękowy czujnik odległości oraz laserowy dalmierz, który pozwala wykrywać przeszkody nawet w promieniu do 12 metrów. W połączeniu z prostym, ale skutecznym algorytmem omijania przeszkód, robot potrafi samodzielnie analizować otoczenie i podejmować decyzje, np. o zmianie kierunku jazdy. Robot Autonomiczny Choć na pierwszy rzut oka ten niewielki robot może przypominać dziecięcą zabawkę, jego wnętrze skrywa zaskakująco zaawansowaną technologię. To efekt naszej pracy w ramach konkursu „Naukolatek” oraz projektu badawczego „Zastosowanie sztucznej inteligencji w nawigacji robotów”, którego celem było stworzenie robota zdolnego do samodzielnego poruszania się w nieznanym środowisku przy wykorzystaniu nowoczesnych algorytmów lokalizacji i planowania trasy. Pod tą niepozorną obudową znajduje się zestaw przemyślanych rozwiązań sprzętowych i programistycznych. Wyposażyliśmy robota m.in. w enkodery, czujnik położenia oraz LIDAR – system umożliwiający precyzyjne skanowanie otoczenia przy pomocy światła laserowego. Po stronie oprogramowania zdecydowaliśmy się na wykorzystanie ROS2 (Robot Operating System 2) – otwartoźródłowego frameworka powszechnie stosowanego w badaniach nad robotyką mobilną. Dzięki połączeniu danych z LIDAR-u i enkoderów możliwe było wdrożenie technologii SLAM (Simultaneous Localization and Mapping), która pozwala robotowi jednocześnie mapować otoczenie i określać własną pozycję w przestrzeni. W efekcie robot jest w stanie autonomicznie poruszać się po nieznanym terenie, wykrywać i omijać przeszkody, a także planować trasę do zadanego punktu z użyciem algorytmu A*. Pracownia W tym roku udało nam się pozyskać i wyremontować dwa pomieszczenia, w których ma teraz siedzibę nasze Koło. Są już meble, stoły, oświetlenie, ale wciąż urządzamy naszą pracownię. Kontakt Wszystkich zainteresowanych naszą działalnością zapraszamy do kontaktu - napisz wiadomość prywatną. WWW: mechanik.team Email: [email protected]