Przeszukaj forum
Pokazywanie wyników dla tagów 'Robotyka'.
Znaleziono 60 wyników
-
O nas SKN Robotyków to Studenckie Koło Naukowe działające przy Instytucie Obrabiarek i Technologii Budowy Maszyn, na Wydziale Mechanicznym Politechniki Łódzkiej. Skupiamy głównie studentów kierunków okołorobotycznych (Automatyka i Robotyka, Mechatronika, ale również Informatyka). Czym się zajmujemy? Naszą główną specjalizacją jest budowa bezzałogowych statków powietrznych (BSP) – od niewielkich wielowirnikowców, po platformy transportowe i konstrukcje typu VTOL, które startują pionowo, a następnie przechodzą w lot poziomy z wydajnością samolotu. Oprócz dronów rozwijamy projekty z zakresu robotyki mobilnej, automatyki oraz systemów autonomicznych m.in. roboty typu linefollower, systemy detekcji i śledzenia obiektów, a także rozwiązania wykorzystujące analizę dźwięku i obrazu w czasie rzeczywistym. W swoich projektach wykorzystujemy m.in.: mikrokontrolery i systemy wbudowane, technologie druku 3D oraz materiały kompozytowe (carbon), systemy autonomicznej nawigacji i sterowania BSP, przetwarzanie sygnałów (dźwięk, obraz, dane z czujników). Bierzemy regularny udział w krajowych i międzynarodowych zawodach robotycznych oraz dronowych, a także organizujemy wewnętrzne warsztaty i szkolenia dla nowych członków. Co do tej pory zrobiliśmy? Naszym największym dotychczasowym sukcesem jest udział w Droniadzie 2026, czyli największych polskich zawodach dla entuzjastów bezzałogowych statków powietrznych, które w tym roku odbyły się po raz pierwszy na szczeblu międzynarodowym. Efektem naszej pracy były dwa pierwsze miejsca w konkurencjach „Sztafeta" (VTOL) oraz „Ogień i Woda", trzecie miejsce w konkurencji „Last Mile", a także nagroda specjalna za perfekcyjny lot BSP VTOL. Wcześniej dwa lata z rzędu nasze roboty typu linefollower brały udział na międzynarodowych zawodach OpenRobotics w Porto, gdzie zdominowały rywalizację, zdobywając pierwsze miejsca we wszystkich kategoriach, w których wystartowały. Aktualnie pracujemy nad mobilnym systemem wykrywania i śledzenia dronów. Projekt dofinansowany w ramach ministerialnego programu „Studenckie koła naukowe tworzą innowacje". Gdzie jest więcej informacji? Facebook: SKN Robotyków | Łódź | Facebook Instagram: https://www.instagram.com/sknrobotykow Strona WWW: https://robotycy.p.lodz.pl/ Zachęcamy do śledzenia naszej działalności oraz kontaktu. Z chęcią odpowiemy na wszystkie pytania!

-
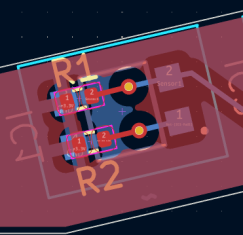
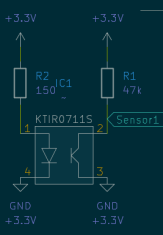
Cześć, ostatnio skończyłem robić PCB do mojej listwy czujników koloru. Po polutowaniu i pomierzeniu czujnik nie działa. Na załączonych zdjęciach przesyłam schemat, schemat PCB, screenshot całego PCB i zdjęcie na którym widać że diody się świecą. Próbowałem świecić latarką, świecić dioda z pilota, zmieniać dynamicznie z czarnej powierzchni na białą i ani na odczycie z stm'a ani na mierniku nie widać zmiany albo widać jakąś leciutką zmianę typu z 3,3V na 3,2V, 3,15V, a na analogowym odczycie na live expressions odczyt sie nie zmienia na tyle znacząco żebym umiał stwierdzić czy działa czy nie. Czy może to być problem tego ze rezystor pull up ma za duża wartosc?


-
Koło Naukowe Systemów Pomiarowych i Automatyki & Badawczych Lotniczych Systemów Pomiarowych i Sterowania (KN SPA i BLSPS) działa przy Uniwersytecie Warszawskim oraz Politechnice Warszawskiej. Zrzeszamy studentów zainteresowanych nowymi technologiami, w szczególności bezzałogowymi systemami powietrznymi, czyli dronami, oraz ich zastosowaniami w różnych obszarach gospodarki i nauki. Naszym celem jest rozwijanie wiedzy i umiejętności związanych z nowoczesnymi technologiami oraz tworzenie przestrzeni do realizacji projektów studenckich i wymiany doświadczeń. Członkowie naszego koła biorą udział w wydarzeniach branżowych i konferencjach technologicznych. Uczestniczyliśmy m.in. w konferencji Arctic Frontiers 2026 w Tromsø w Norwegii oraz w targach technologicznych Drone World Expo 2026, gdzie mieliśmy okazję zapoznać się z najnowszymi rozwiązaniami w branży oraz nawiązać kontakty z przedstawicielami środowiska technologicznego. Działalność w kole naukowym daje studentom możliwość zdobywania doświadczenia w pracy projektowej, rozwijania zainteresowań technologicznych oraz poznawania praktycznych zastosowań nowych technologii. Członkowie koła mogą brać udział w projektach, warsztatach oraz wydarzeniach branżowych, a także rozwijać kompetencje związane z pracą zespołową i realizacją inicjatyw studenckich. Do koła mogą dołączyć studenci zainteresowani nowymi technologiami, dronami, projektami interdyscyplinarnymi oraz działalnością organizacyjną. Więcej informacji o działalności koła można znaleźć na naszych profilach w mediach społecznościowych oraz na stronie internetowej: https://knspaiblsps.pl

-
Jesteśmy drużynami robotycznymi z technikum w Krakowie i Zamościu. Drużyna to zespół uczniów, pasjonatów nowych technologii oraz doświadczonych mentorów, których łączy wspólna pasja, ciekawość świata i chęć nieustannego rozwoju. Każdy członek wnosi coś wyjątkowego – drużyna dzieli się na podzespoły: mechaników, elektryków, programistów oraz zespół brandingowy odpowiedzialny za wizerunek i promocję. Nad każdą grupą czuwa mentor – osoba najbardziej doświadczona w danej dziedzinie, wspierająca młodszych kolegów wiedzą i praktyką. Od 8 lat budujemy roboty na różne zawody robotyczne takie jak: -First Robotic Competition, (zdobyliśmy Imagery i Creativity Award) -European Rover Challenge, (uczestniczyliśmy w finałach) -First Tech Challenge, (zostaliśmy wyróżnieni Creativity Award) -World Robot Olimpiad, (wygraliśmy finał w kategorii Future Innowators) -CanSat. Nasze social media: Facebook Instagram Tiktok

-
Cześć! Jesteśmy Kołem Naukowym Absolute Edge działającym przy Wydziale Mechatroniki Politechniki Warszawskiej. Realizujemy projekty z zakresu bezzałogowej robotyki mobilnej. Choć nasze koło powstało nieco ponad 8 miesięcy temu - to już według wielu daliśmy się we znaki zarówno lokalnie na Politechnice Warszawskiej, jak i wśród innych studenckich zespołów dronowych. Budujemy działające konstrukcje, tworzymy oprogramowanie i testujemy rozwiązania w realnych warunkach — od prototypów po gotowe systemy. Dzielimy się technicznie na zespoły: programistyczny, mechaniczny oraz elektroniczny. Pracujemy w małych, zwinnych podzespołach, co pozwala szybko testować rozwiązania. Jesteśmy wszechstronnie aktywnym kołem, które mocno się rozwija. Naszymi celami przewodnimi jest osiąganie sukcesów w olimpiadach krajowych oraz międzynarodowych. Wierzymy, że chęć działania, która nas łączy pozwoli nam na osiąganie coraz to wyższych pułapów! Nasze projekty i dotychczasowa aktywność: We wrześniu 2025r. wzięliśmy udział w konkurencji Droniada Hydrolab, gdzie nasza konstrukcja skutecznie i powtarzalnie pobrała próbkę wody i przetransportowała ją do labolatorium - w najkrótszym czasie. Dzięki temu zajęliśmy 2 miejsce w tymże konkursie. Projekt ten chcemy stale rozwijać, by finalnie mógł stać się mobilną stacją badawczą, mierzącą parametry wody. Wrzesień 2025 - drugie miejsce w konkurencji Droniada Hydrolab W październiku 2025 wzięliśmy udział forum gospodarczym - "Krynica Forum", gdzie uczestniczyliśmy w wielu panelach dotyczących prowadzenia biznesu, podatków, prezentacji, konkurencji rynkowej, bezpieczeństwa narodowego. Wydarzenie to pozwoliło nam zebrać dużo wartościowych kontaktów. Ponadto odnieśliśmy sukces w konkursie inicjatyw studenckich, gdzie zdobyliśmy 3 miejsce prezentując pomysł na przywrócenie krajowej zdolności produkcji dronów — odpowiedź na wyzwanie uzależnienia od zagranicznych łańcuchów dostaw. Październik 2025 - Krynica Forum 7 i 8 października można nas było zobaczyć na Targach Kół Naukowych "KONIK PW", gdzie nasze stoisko było mocno widoczne, od razu po wejściu do Gmachu Głównego. Prezentowaliśmy tam nasze projekty - te które się już udało skończyć, ale także te, które są obecnie tworzone. W rekrutacji do naszego koła zgłosiło się na początkowym etapie już ponad 30 osób, co znacznie poprawi z czasem nasze możliwości organizacyjne. Październik 2025 - Targi Kół Naukowych "KONIK PW" W listopadzie uczestniczyliśmy w międzynarodowych Targach przetwórstwa oraz druku 3D - "Formnext 2025" odbywających się we Frankfurcie nad Menem. Na targach zobaczyliśmy najnowsze technologie z branży addytywnej i przetwórstwa tworzyw. Porozmawialiśmy z wieloma wiodącymi firmami z branży, dzięki czemu będziemy mieli współprace i wsparcia rzeczowe dla koła. Listopad 2025 - targi Formnext Przyszłe projekty zapowiadają się naprawdę ambitnie! Już teraz przygotowywujemy się do zawodów międzynarodowych: 1) SUAS - dronów autonomicznych 2) UAS - dronów transportowych A także w większej ilości konkurencji krajowej Droniady! W obecnej chwili pracujemy nad: - projektem uniwersalnej stacji naziemnej do dronów - dronem transportowym o udźwigu powyżej 20 kg - dronem o zastosowaniu inspekcyjnym/patrolowym z wydłużonym czasem lotu - powyżej 75 min. - dronem "matką" przenoszącym małe drony beacony. Kontakt: email: [email protected] Instagram: https://www.instagram.com/knabsoluteedge/ Facebook: https://www.facebook.com/profile.php?id=61574625725432 lokalizacja: sala 727, Wydział Mechatroniki Politechniki Warszawskiej







-
- 2
-

-
- Koło Naukowe
- koła
- (i 3 więcej)
-
Niejednokrotnie tworząc różne roboty, maszyny oraz platformy terenowe, miałem do czynienia z łączeniem wielu modułów lub tworzenia prowizorycznych układów na płytkach uniwersalnych. Problem pojawiał się na tyle regularnie, że postanowiłem wykonać układ umożliwiający w zasadzie bezpośrednie podłączenie napędu oraz jego obsługę za pomocą modułu NRF24L01. Uniwersalny sterownik robotów to płytka oparta na Atmega328AU, która umożliwia sterowanie radiowe dwoma silnikami DC oraz 6 portami IO. Układ jest rozpoznawany przez komputer jako Arduino Nano, dzięki czemu jest wygodny w obsłudze oraz kompatybilny ze środowiskiem Arduino IDE. W PROJEKCIE WYKORZYSTANO MIĘDZY INNYMI: Mikrokontroler Atmega328P-AU, Złącze USB B SMD, Diody LED statusowe zielone 0603, Moduł radiowy NRF24L01, Złącza XT30 M, Złącza ARK 2pin 5mm, Oscylator 12MHz, Oscylator 16MHz, Stabilizator 3V3, Stabilizator 5V, PEŁNA LISTA KOMPONENTÓW BOM: FUNKCJE SPRZĘTOWE STEROWNIKA: ⦁ Wbudowane złącze zasilania XT30 przyjmujące maksymalnie 28V DC, ⦁ Złącze włącznika, ⦁ Wbudowane statusowe diody zasilania, ⦁ Konwertery napięcia 5V oraz 3,3V, ⦁ Listwę zasilającą 5V, ⦁ Przycisk reset, ⦁ Wbudowane dwa mostki H - BD62130AEFJ-E2, ⦁ Wyprowadzenie pod moduł nrf24l01, ⦁ 6 portów IO (2x PWM, 4x ADC, 1xI2C), ⦁ Komunikacja przez mini USB B, ⦁ Komunikacja przez SPI, ⦁ Komunikacja przez I2C, STEROWANIE SILNIKA DC: Obsługa silników szczotkowych odbywa się za pomocą dwóch zintegrowanych z PCB mostków H BD62130AEFJ-E2. Umożliwiają one pracę silników do 28V oraz 3A. Ich obsługa odbywa się po przez piny: ⦁ PD2 (Arduino port 2) – M1A, ⦁ PD3 (Arduino port 3) – M1B, ⦁ PD4 (Arduino port 4) – M2A, ⦁ PD7 (Arduino port 7) – M2B, PEŁEN SCHEMAT ELEKTRYCZNY: ZDJĘCIA ZMONTOWANEJ PCB: PODSUMOWANIE: Ten projekt bardzo usprawnił moją pracę oraz przyspieszył postępy nad innymi projektami. Głównie przez oszczędność czasu oraz wygodę w obsłudze i debbugowaniu problemów. W przyszłości planuję ponownie pochylić się nad tym sterownikiem, próbując zmniejszyć jego gabaryty oraz wyprowadzając więcej pinów mikrokontrolera.







- 4 odpowiedzi
-
- 6
-
-
- arduino nano
- Arduino IDE
- (i 3 więcej)
-
Mam problem z robotem 2WD. NRF działa, jak dam zamiast v wartość bezpośrednio 255 to też jedzie do przodu i do tyłu. Nie działa w momencie gdy wstawiam v, czytane z NRFa. Na razie chcę żeby chociaż to działało, potem będę się głowił nad skrętami. Jest tam trochę śmieci, gdyż usuwałem kod związany ze skręcaniem (chciałbym zmieniać prędkość każdego z kół w zależności od kierunku skrętu) Prosiłbym o pomoc. Zakres joysticka wynosi ok. 0-675. Środek w pkt ok. X:336, Y:335 Robot na arduino nano, nadajnik na uno. #include <SPI.h> #include <RF24.h> RF24 radio(9,8); const byte adres[6]="00001"; int v; //predkosc do przodu/tyłu int a; //predkosc obrotu struct Data{ int x; int y; }; void setup() { Serial.begin(9600); radio.begin(); radio.setPALevel(RF24_PA_HIGH); radio.setDataRate(RF24_250KBPS); radio.openReadingPipe(0, adres); radio.startListening(); pinMode(10, OUTPUT); //IN 1 pinMode(6, OUTPUT); //IN 2 pinMode(7, OUTPUT); //IN 3 pinMode(4, OUTPUT); //IN 4 pinMode(3, OUTPUT); //EN 1 2 pinMode(5, OUTPUT); //EN 3 4 } void loop() { bool kierunek=true; //true dla przodu, false dla tyłu bool zwrot=false; //true że zmienia kierunek, false że nie float v2, a2; int pwm1=0, pwm2=0; Data data; bool zwrot2=false; //true dla prawo, false dla lewo if(radio.available()) { radio.read(&data, sizeof(data)); v=data.x-338; if(v<0) { kierunek=false; v=-1*v; } a=data.y-338; if(a<-10) //skręt w lewo { zwrot=true; zwrot2=false; a=-1*a; } else if(a>10) //skręt w prawo { zwrot=true; zwrot2=true; } else { a=0; } int a2=map(a, 0, 350, 0, 250); int v2=map(v, 0, 350, 0, 255); pwm1=min(255, a); if(v<10) { analogWrite(3, 0); analogWrite(5, 0); digitalWrite(10, LOW); digitalWrite(6, LOW); digitalWrite(7, LOW); digitalWrite(4, LOW); } else if(kierunek==true) { analogWrite(3, v2); analogWrite(5, v2); digitalWrite(10, HIGH); digitalWrite(6, LOW); digitalWrite(7, HIGH); digitalWrite(4, LOW); } else if(kierunek==false) { analogWrite(3, v2); analogWrite(5, v2); digitalWrite(10, LOW); digitalWrite(6, HIGH); digitalWrite(7, LOW); digitalWrite(4, HIGH); } } else if(radio.available()==false) { pwm1=0; pwm2=0; analogWrite(3, pwm2); analogWrite(5, pwm1); digitalWrite(10, LOW); digitalWrite(6, LOW); digitalWrite(7, LOW); digitalWrite(4, LOW); Serial.print("Nie połączono"); } }
-

Mechanik TEAM - Szkolne Koło Robotyczne przy ZSM w Rzeszowie
MechanikTEAM opublikował temat w Koła Naukowe
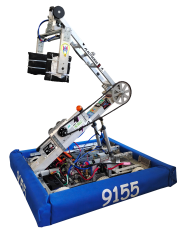
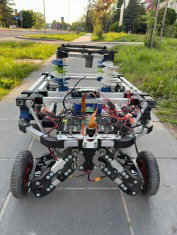
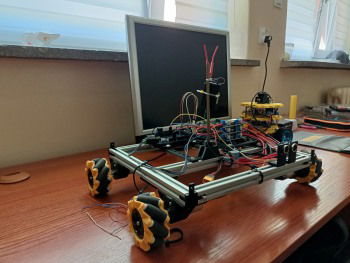
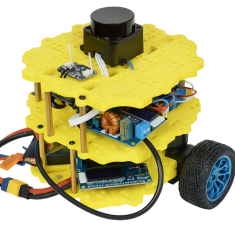
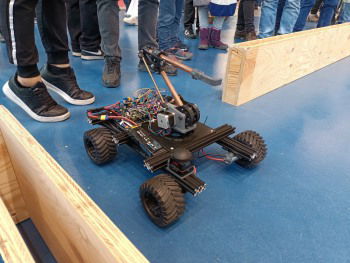
Cześć! Szkolne Koło Robotyczne „Mechanik TEAM” powstało na początku roku szkolnego 2024/2025 w Zespole Szkół Mechanicznych w Rzeszowie. Choć oficjalnie działa dopiero od niedawna, jego korzenie sięgają wcześniejszych działań uczniów szkoły. Zakładając konto na Forbocie chcemy podzielić się z Wami naszymi pomysłami, dokonaniami . Postaramy się przedstawić i zaprosić do śledzenia naszych poczynań. Logo Szkolnego Koła Robotycznego Mechanik TEAM Logo bynajmniej nie jest przypadkowe - to bardzo uproszczony szkic naszego pierwszego robota. O nas Jesteśmy grupą uczniów (aktualnie ok. 10 osób) uczęszczających do różnych klas Zespołu Szkół Mechanicznych w Rzeszowie. Łączy nas pasja do budowania robotów, elektroniki, mechaniki, projektowania 3D oraz dobrej zabawy. Działalność Uczestniczymy w konkursach, w których startują nasze roboty (lub w ramach nich są budowane) - np. X-Challenge 2024, "Naukolatek - nastoletni naukowiec" czy też I miejsce w IX edycji ogólnopolskiego Konkursu Młodych Inżynierów. Oczywiście bierzemy również udział w wydarzeniach promujących edukację i naukę - np. Moc Odkrywców 2025 czy w dniach otwartych naszej szkoły. Roboty Fredzio Nasza debiutancka konstrukcja — mobilny robot zdalnie sterowany zbudowany na bazie lekkich, ale wytrzymałych profili aluminiowych i napędzany czterema niezależnymi silnikami — miała swoją premierę podczas ogólnopolskich zawodów X-Challenge 2024 w kategorii Task Hunters. Choć nasz robot powstawał w zawrotnym tempie, przy bardzo ograniczonym budżecie i w warunkach dalekich od idealnych, postanowiliśmy podjąć wyzwanie. Budowa była pełna niespodzianek – od drobnych zwarć w układzie elektrycznym, przez poważną awarię w dniu zawodów, aż po spektakularną wywrotkę podczas próbnego przejazdu i złamane ramię w trakcie jednej z konkurencji. Mimo tych przeciwności nasza konstrukcja nie tylko wystartowała, ale również zajęła 10. miejsce w stawce kilkudziesięciu zespołów z całej Polski, co uważamy za ogromny sukces. Już teraz pracujemy nad nową, poprawioną wersją na kolejne zawody - powstaje Fredzio 2.0. Ragnar Pod względem budowy, robot bazuje na solidnym i lekkim szkielecie wykonanym z profili aluminiowych, co zapewnia zarówno wytrzymałość, jak i elastyczność w dalszej rozbudowie. Napędzany jest przez cztery niezależne silniki, z których każdy steruje osobnym kołem typu omniwheel – to właśnie one czynią tę konstrukcję wyjątkową. Zastosowanie omniwheels umożliwia robotowi pełną swobodę ruchu: może poruszać się nie tylko klasycznie – do przodu i do tyłu – ale także w bok, po skosie, a nawet obracać się wokół własnej osi. Co więcej, dzięki odpowiedniemu algorytmowi sterowania możliwe jest przesunięcie osi obrotu robota poza jego fizyczną podstawę – nawet o 30 cm. To oznacza, że maszyna może np. precyzyjnie okrążać obiekt znajdujący się przed nią bez potrzeby zmiany orientacji całej konstrukcji. Podobnie jak nasz wcześniejszy projekt – Fredzio – robot ten może być sterowany zdalnie, jednak tutaj poszliśmy o krok dalej. Dzięki zastosowaniu dodatkowych sensorów, możliwa jest również częściowa autonomia. Wyposażyliśmy go w ultradźwiękowy czujnik odległości oraz laserowy dalmierz, który pozwala wykrywać przeszkody nawet w promieniu do 12 metrów. W połączeniu z prostym, ale skutecznym algorytmem omijania przeszkód, robot potrafi samodzielnie analizować otoczenie i podejmować decyzje, np. o zmianie kierunku jazdy. Robot Autonomiczny Choć na pierwszy rzut oka ten niewielki robot może przypominać dziecięcą zabawkę, jego wnętrze skrywa zaskakująco zaawansowaną technologię. To efekt naszej pracy w ramach konkursu „Naukolatek” oraz projektu badawczego „Zastosowanie sztucznej inteligencji w nawigacji robotów”, którego celem było stworzenie robota zdolnego do samodzielnego poruszania się w nieznanym środowisku przy wykorzystaniu nowoczesnych algorytmów lokalizacji i planowania trasy. Pod tą niepozorną obudową znajduje się zestaw przemyślanych rozwiązań sprzętowych i programistycznych. Wyposażyliśmy robota m.in. w enkodery, czujnik położenia oraz LIDAR – system umożliwiający precyzyjne skanowanie otoczenia przy pomocy światła laserowego. Po stronie oprogramowania zdecydowaliśmy się na wykorzystanie ROS2 (Robot Operating System 2) – otwartoźródłowego frameworka powszechnie stosowanego w badaniach nad robotyką mobilną. Dzięki połączeniu danych z LIDAR-u i enkoderów możliwe było wdrożenie technologii SLAM (Simultaneous Localization and Mapping), która pozwala robotowi jednocześnie mapować otoczenie i określać własną pozycję w przestrzeni. W efekcie robot jest w stanie autonomicznie poruszać się po nieznanym terenie, wykrywać i omijać przeszkody, a także planować trasę do zadanego punktu z użyciem algorytmu A*. Pracownia W tym roku udało nam się pozyskać i wyremontować dwa pomieszczenia, w których ma teraz siedzibę nasze Koło. Są już meble, stoły, oświetlenie, ale wciąż urządzamy naszą pracownię. Kontakt Wszystkich zainteresowanych naszą działalnością zapraszamy do kontaktu - napisz wiadomość prywatną. WWW: mechanik.team Email: [email protected]



-
 Witam panowie, pilnie potrzebuję osoby która zbuduje dla mnie mini robota mobilnego zdalnie sterowanego z kamerką i mikrofonem. Proszę tylko o kontakt osoby które są w stanie zbudować takie urządzenie. Kontakt do mnie 729 797 649.
Witam panowie, pilnie potrzebuję osoby która zbuduje dla mnie mini robota mobilnego zdalnie sterowanego z kamerką i mikrofonem. Proszę tylko o kontakt osoby które są w stanie zbudować takie urządzenie. Kontakt do mnie 729 797 649. -
Witam wszystkich! Czy ktoś ma ochotę rozwijać platformy gąsienicowe i inne różne drony? Planuję zebrać zespół podobnie myślących ludzi i stworzyć firmę technologiczną, jest wiele planów i pomysłów, które chciałbym zrealizować)) Platforma gąsienicowa video





-

Początkujący Programowanie w Python. Podstawy dla początkujących
mcsw_02 opublikował temat w Artykuły użytkowników
Języki programowania przechodziły i nadal przechodzą ewolucję – od asemblerowych instrukcji, aż po złożone systemy abstrakcji pozwalające pisać kod bliższy ludzkiemu myśleniu niż mechanicznej logice procesora. Każdy etap tego rozwoju był ukierunkowany na zwiększenie intuicyjności i efektywności procesu programowania. Wraz z rozwojem technologii zaczęto też dążyć do tworzenia języków wysokopoziomowych, w których programista mógł skupić się na rozwiązywaniu problemów zamiast na szczegółach technicznych działania sprzętu. W tym kontekście narodził się Python - język, który łączy prostotę składni z potężnymi możliwościami, zyskując popularność wśród programistów na całym świecie. W tym artykule przedstawię Ci: Historię Pythona. Zastosowanie. Filozofię i Zen Pythona. Podstawową składnię i słowa kluczowe. Czy wiedziałeś, że nazwa języka nie nawiązuje do zwierzęcia, lecz do brytyjskiego serialu komediowego Monty Python’s Flying Circus? Źródło zdjęcia. Historia języka Python Historia sięga końca lat 80., kiedy Guido van Rossum, holenderski programista, rozpoczął prace nad nowym językiem, który miał być łatwiejszy w użyciu niż dostępne wówczas alternatywy. Van Rossum czerpał inspirację z języka ABC, ale chciał stworzyć narzędzie bardziej elastyczne i wszechstronne. W 1991 roku opublikował pierwszą wersję Pythona (0.9.0), który zawierał takie elementy jak obsługa wyjątków, funkcje i podstawowe typy danych: lista, słownik, łańcuchy znaków i inne. Python 2 (wydany w 2000 roku) oraz Python 3 (w 2008 roku) – przynosiły nowe funkcje i usprawnienia. Choć Python 2 przez wiele lat był szeroko stosowany, jego wsparcie zakończyło się w 2020 roku na rzecz Pythona 3. Python został stworzony, aby ułatwić programowanie i uczynić je bardziej intuicyjnym. Źródło zdjęcia. Zastosowanie języka Python Obecnie Python znajduje zastosowanie w różnych dziedzinach – od analizy danych i sztucznej inteligencji po tworzenie stron internetowych i automatyzację. Bogaty ekosystem bibliotek i funkcjonalności języka sprawiają, że Python dynamicznie się rozwija, pozostając jednym z kluczowych języków współczesnej informatyki. 1. MicroPython i CircuitPython Python, jako język o szerokim zastosowaniu, doczekał się licznych wersji i wariantów dostosowanych do różnych platform i urządzeń. Jednym z takich przykładów są MicroPython i CircuitPython – lekkie implementacje Pythona, przeznaczone do działania na mikrokontrolerach, takich jak ESP32 czy Raspberry Pi. Dzięki współczesnym technologiom możliwe jest programowanie mikrokontrolerów prostymi językami, takimi jak MicroPython. Źródło zdjęcia. 2. Sztuczna inteligencja Jednym z najważniejszych powodów, dla których Python zyskał tak dużą popularność w środowisku algorytmów sztucznej inteligencji, jest jego przejrzystość i prostota. Python oferuje szeroki wybór bibliotek i narzędzi wspierających uczenie maszynowe oraz sztuczną inteligencję, takich jak Tensorflow oraz Keras. Dzięki Pythonowi możecie zaprojektować własną architekturę konwolucyjnej sieci neuronowej lub zaimplementować różne algorytmy sztucznej inteligencji. Chciałbyś zaprojektować własną architekturę sieci neuronowej? Python się do tego nada! Źródło zdjęcia. 3. Analiza obrazów Dzięki Pythonowi można łatwo przetwarzać obrazy, tworzyć algorytmy do analizy wizualnej oraz integrować te rozwiązania z innymi aplikacjami. Przykładowo, OpenCV umożliwia implementację algorytmów do rozpoznawania twarzy, co znajduje zastosowanie w systemach bezpieczeństwa i monitoringu. Python oferuje biblioteki umożliwiające efektywną analizę obrazu. Źródło zdjęcia. Filozofia i Zen Pythona Przed rozpoczęciem nauki Pythona warto zapoznać się z jego filozofią, która przyświecała twórcom języka i społeczności programistycznej. Python został zaprojektowany z myślą o czytelności i prostocie. Te wartości są ujęte w Zen Pythona, czyli zestawie 19 zasad przewodnich sformułowanych przez Tima Petersa. Można je wyświetlić w konsoli Pythona, wpisując: import this Fragment Zen: Beautiful is better than ugly. Explicit is better than implicit. Simple is better than complex. Complex is better than complicated… Charakterystyka Pythona i narzędzia do pisania w Pythonie Python jest językiem interpretowanym, co oznacza, że jest wykonywany bezpośrednio przez interpreter, linia po linii, zamiast być kompilowanym do kodu maszynowego przed wykonaniem. Jest również dynamiczny. Nie wymaga deklarowania typu deklarowanej zmiennej. Istnieje kilka różnych podejść do pracy z Pythonem. Zależnie od osobistych preferencji oraz specyfiki projektu powinieneś dobrać narzędzie, które będzie Ci pasowało: Interaktywny interpreter: interaktywne programowanie i testowanie kodu w czasie rzeczywistym. Edytor tekstu: możliwe jest używanie klasycznych edytorów, takich jak Vim, Emacs, czy Nano. Notatnik typu Google Colab: to świetne połączenie skryptu, tekstu i wizualizacji w jednym miejscu. Wykorzystywany często do nauki programowania lub uczenia maszynowego. Zintegrowane Środowisko Programistyczne (IDE): środowiska takie jak Visual Studio Code oferują pełną integrację z Pythonem, wtyczki do debugowania i wsparcie w pisaniu kodu. Niezależnie jaką metodę wybierzesz, znajomość podstawowej składni jest niezbędna. Źródło zdjęcia. W tym artykule będę wykorzystywał Visual Studio Code. Instalacja Pythona została tu pominięta. Przystępując do poniższej treści, powinieneś już mieć zainstalowanego Pythona oraz skonfigurowany edytor tekstu lub ulubione IDE. Otwórzmy Terminal i włączmy interaktywny interpreter. Włączenie Terminala i interaktywnego interpretera. Terminal włącza się poprzez zakładkę lub skrót klawiszowy Ctrl + Shift + `. Po włączeniu należy wpisać komendę python. Podstawowa składnia i słowa kluczowe Składnia jest podstawowym elementem każdego języka programowania, ponieważ określa zasady, które rządzą tworzeniem poprawnego kodu. Przedstawię Ci najważniejsze funkcje i słowa kluczowe. Zrozumienie tych podstawowych elementów pomoże w efektywnym tworzeniu kodu, który jest nie tylko poprawny, ale także łatwy do zrozumienia i utrzymania. 1. Deklarowanie zmiennych i podstawowe operatory matematyczne Podobnie jak w innych językach programowania istnieje możliwość deklarowania zmiennych. Tak jak wspomniałem, Python jest językiem dynamicznym. Nie ma więc potrzeby podawania typu zmiennej. >>> a = 3 >>> b = 4.5 >>> c = 3.333 >>> a + b * c 17.9985 W Python występują podstawowe operatory matematyczne: Dodawanie: + Odejmowanie: - Mnożenie: * Dzielenie: / Reszta z dzielenia: % Potęgowanie: ** Dzielenie całkowite: // >>> 5 % 2 1 >>> 3 ** 4 81 >>> 10 // 3 3 Możemy zadeklarować łańcuch znaków (napis): >>> napis = "Hello Forbot!" >>> napis 'Hello Forbot!' Napisy możemy zawierać w cudzysłowie lub w apostrofie. Nie ma to znaczenia. Do zmiennej możemy przypisać wartość logiczną i wykonywać za pomocą niej operacje. >>> logika_1 = True >>> logika_2 = False >>> logika_1 + logika_2 1 >>> logika_1 * logika_2 0 Warto zauważyć, że True oraz False można reprezentować jako kolejno: 1 i 0. 2. Kontenery danych W Pythonie występują 4 główne kontenery danych: Lista (ang. list): deklaracja nawiasami kwadratowymi. Mutowalny (zmienny) kontener. Krotka (ang. tuple): deklaracja nawiasami okrągłymi. Niemutowalny (niezmienny) kontener. Zbiór (ang. set): deklaracja nawiasami klamrowymi. Niemutowalny, nieindeksowany i posortowany kontener. Jego główną zaletą jest usuwanie powtórzeń elementów. Słownik (ang. dictionary): deklaracja nawiasami klamrowymi. Nieindeksowany kontener, który zawiera pary klucz: wartość. Elementy w słowniku się nie powtarzają. Deklaracja kolejnych kontenerów danych: >>> lista = [1, 2, 'a', ['zagniezdzona', 'lista'], 3] >>> krotka = (1, 2, 'a', []) >>> zbior = {1, 3.14, 'abc'} >>> slownik = {"jablko":"czerwony", "marchewka":"pomaranczowy", "banan":"zolty"} Możemy odwołać się do elementów po indeksach w liście i krotce. W słowniku należy podać klucz, aby odwołać się do poszczególnej wartości. Przykłady odwołań: >>> lista[2] 'a' >>> krotka[1] 2 >>> slownik["jablko"] 'czerwony' 3. Skrypty i Hello World! Czas na skrypty. Stwórzmy plik main.py i wypiszmy w konsoli Hello World! korzystając z funkcji print(). Twój pierwszy program w Pythonie: Hello World! Jeżeli wszystko jest skonfigurowane dobrze, to w terminalu lub w konsoli powinien się wyświetlić napis Hello World! W Pythonie nie ma jawnie zadeklarowanej funkcji main(), jak w C/C++. Wszystkie polecenia piszemy z góry do dołu. Instrukcje wliczające się w pętle, instrukcje warunkowe i funkcje poprzedzamy wcięciem jednego tabulatora. Nie stosuje się średników na końcu instrukcji. 4. Instrukcje warunkowe Konstrukcja instrukcji warunkowych wygląda następująco: if warunek: instrukcje elif warunek_2: instrukcje else: instrukcje Po warunkach występuje dwukropek, który oznacza, że instrukcje poniżej tyczą się tego warunku. Dodatkowo przed instrukcjami występują wcięcia. Stwórzmy skrypt, który będzie sprawdzał, czy może istnieć trójkąt o podanych bokach. Należy także sprawdzić, czy podane wartości są poprawne, tj. Czy nie są ujemne lub zerowe. Instrukcje porównania logicznego obejmują operatory or oraz and. a = 5 b = 4 c = 6 if a <= 0 or b <= 0 or c <= 0: print("Blad! Wartosci sa niepoprawne!") elif a + b > c and a + c > b and b + c > a: print("Trojkat moze istniec") else: print("Trojkat NIE moze istniec") 5. Pętle Python posiada dwa rodzaje pętli: while warunek: dopóki warunek jest spełniony, instrukcje zawarte w pętli się wykonują. for element in zbior: instrukcje związane z pętlą wykonują się dla każdego elementu w zbiorze. Z obu pętli możemy wyjść poprzez zastosowanie komendy break lub przejść do następnej iteracji słowem continue. Zaletą pętli for w Pythonie jest bezpośrednie odwoływanie się do elementów w zbiorze. Dzięki temu nie musimy martwić się o indeksy i długość zbioru. Utwórzmy skrypt, który w pętli while będzie powtarzał potęgowanie, dopóki zmienna będzie mniejsza od stu. x = 2 while x < 100: x = x**2 Zastosujmy pętlę for do iterowania po liście. Jeżeli element w liście wyniesie 0, to zliczmy ją i na końcu podajmy ilość zer w tej liście. lista_liczb = [1, 2, 0, 56, 89, 0, -1, 12, 0] licznik_zer = 0 for liczba in lista_liczb: if liczba == 0: licznik_zer = licznik_zer + 1 print(licznik_zer) Jeżeli jednak potrzebujemy iteratora, to możemy zrobić to na dwa sposoby: Chcąc iterować po konkretnych liczbach, możemy zastosować poniższą składnię: for iterator in range(start, stop, krok) Stosujemy polecenie range(), które zawiera indeks początkowy, indeks końcowy oraz krok, z jakim iterator będzie przeskakiwał po kolejnych liczbach. Pętla wykona się w zakresie od start do stop-1. Potrzebując iteratora przy liście elementów możemy zastosować polecenie enumerate(): for iterator, element in enumerate(lista_elementow) Wtedy do zmiennej iterator zostanie wpisany aktualny indeks, a do zmiennej element aktualna wartość ze zbioru lista_elementow. Skrypt wypisujący w konsoli liczby od 0 do 9: for i in range(0, 10): print(i) 6. Funkcje Funkcje służą do zwiększenia czytelności kodu niejako chowając powtarzający się kod. Definicja funkcji z dwoma parametrami odbywa się zgodnie z poniższą składnią: def nazwa_funkcji(arg_1: typ, arg_2:typ) -> typ_zwracanej_zmiennej Strzałka i typ zwracannej zmiennej jest opcjonalny. Jeżeli nie musimy podawać argumentów do funkcji, to je też możemy pominąć. Przydatnym słowem kluczowym jest pass. Stosuje się go, jeżeli będziemy implementować funkcję, ale jeszcze nie chcemy budować jej ciała. Na zakończenie parę słów o komentarzach. Standardowym komentarzem jednowierszowym jest napis poprzedzony znakiem #. Komentarze wielowierszowe poprzedzamy i kończymy trzema znakami apostrofa (‘ ‘ ‘ komentarz ‘ ‘ ‘) lub cudzysłowami (“ “ “ komentarz “ “ “). W języku Python możemy dodać opis funkcji, umieszczając go na początku jej ciała w postaci tzw. docstringa. Aby to zrobić, należy otoczyć opis potrójnymi apostrofami (''') lub cudzysłowami ("""). def wylicz_pole(bok_1: int, bok_2: int) -> int: ‘’’tu bedzie opis funkcji wylicz_pole‘’’ pass def wylicz_prad(napiecie: float, rezystancja: float) -> float: prad = napiecie / rezystancja # wyliczenie pradu return prad aktualne_napiecie = 5.45 rezystancja = 1000 aktualny_prad = wylicz_prad(aktualne_napiecie, rezystancja) print(aktualny_prad) # wypisanie pradu Oprócz wszystkich wymienionych przeze mnie funkcji i słów kluczowych istnieje jeszcze wiele przydatnych elementów języka Python, takie jak lambda, with, yield. Gorąco zachęcam Cię do szczegółowego zapoznania się z tym językiem, bo znajdzie zastosowanie w wielu projektach. Podsumowanie Python to wszechstronny język programowania, który zyskał popularność dzięki swojej prostocie i czytelnej składni. Python jest używany w wielu dziedzinach, w tym w analizie danych, sztucznej inteligencji, web development i automatyzacji. Dzięki bogatej bibliotece standardowej oraz licznym zewnętrznym modułom Python jest idealnym narzędziem zarówno dla początkujących, jak i zaawansowanych programistów. Warto się z nim zapoznać, ponieważ jego elastyczność i wsparcie społeczności sprawiają, że jest jednym z najważniejszych języków programowania na świecie.







- 2 odpowiedzi
-
- 1
-
-
- Programownie
- python
- (i 2 więcej)
-
Pneumatyka odgrywa kluczową rolę w dzisiejszym przemyśle, będąc podstawą wielu systemów automatyzacji, robotyki oraz procesów produkcyjnych. Zrozumienie zasad działania układów pneumatycznych nie tylko pomaga w projektowaniu wydajnych i niezawodnych systemów, ale również otwiera drzwi do innowacyjnych rozwiązań technicznych. Pneumatyka znajduje zastosowanie w branżach, gdzie kluczowe znaczenie ma szybkie i niezawodne działanie systemów, a także tam, gdzie użycie energii elektrycznej lub hydraulicznej jest mniej efektywne, lub niebezpieczne. Jednym z narzędzi, które mogą Ci przybliżyć pneumatykę oraz jej zastosowanie jest program FluidSIM pozwalający na symulację schematów i systemów pneumatyki, hydrauliki i elektryki. W tym artykule przedstawię Ci: Do czego służy pneumatyka? Czym jest FluidSIM? Funkcjonalności FluidSIM. Komponenty dostępne w FluidSIM. Przykład symulacji. Pneumatyka to ciekawa i względnie łatwa dziedzina, która może urozmaicić wiele twoich projektów! Źródło zdjęcia. Do czego służy pneumatyka? Pneumatyka to dziedzina inżynierii, która zajmuje się wykorzystaniem sprężonego powietrza do wykonania pracy mechanicznej. Stosuje się ją w różnych branżach do napędzania, sterowania i automatyzacji procesów. Na liniach produkcyjnych znajdziemy maszyny przemysłowe, którymi mogą być prasy pneumatyczne korzystające z powietrza do generowania siły przy docisku. Roboty przemysłowe korzystają z pneumatycznych przyssawek, którymi podnoszą i transportują elementy produkcyjne. Technologia sprężonego powietrza znajduje zastosowanie w wielu branżach. Poniżej przedstawiam ciekawe i praktyczne zastosowanie pneumatyki: 1) Pneumatyczne mięśnie, które poruszają się kołami. Miękka robotyka to dział robotyki, który zajmuje się tworzeniem robotów przy użyciu rozciągliwych materiałów. W tej dziedzinie bardzo użyteczna jest pneumatyka, dzięki której można poruszać kończynami robotów. Grupa badawcza Mazzeo stworzyła miękkiego robota mobilnego wykorzystującego powietrze do napędzania kół w robocie. Robot jest w całości elastyczny, co sprawia, że nie ma żadnych sztywnych części, dzięki czemu może bezpiecznie upadać z wysokości. Mobilny robot pneumatyczny. Źródło zdjęcia. 2) Miękki robot wydrukowany w 3D. Podobnym zastosowaniem robotyki miękkiej jest wykorzystanie jej przy stworzeniu czworonożnego robota kroczącego. Zespół z Uniwersytetu Kalifornijskiego w San Diego zastosował pneumatykę w zginaniu kończyn robota, który potrafi poruszać się po nierównym terenie. Pneumatyczny robot kroczący. Źródło zdjęcia. 3) Roboty przemysłowe z pneumatycznymi przyssawkami. Pneumatykę chętnie stosuje się w robotyce przemysłowej. Roboty wyposażone w przyssawki pneumatyczne precyzyjnie podnoszą i przenoszą elementy, dzięki zastosowaniu sprężonego powietrza. Robot może efektywnie manipulować ładunkami o różnych kształtach. Robot przemysłowy wyposażony w przyssawki pneumatyczne. Źródło zdjęcia. 4) Siłowniki pneumatyczne Jednym z najpopularniejszych zastosowań pneumatyki jest zastosowanie sprężonego powietrza w siłownikach pneumatycznych. Poprzez doprowadzenie lub odprowadzenie powietrza do odpowiedniej komory w konstrukcji tego urządzenia, siłownik wykonuje liniowy ruch mechaniczny, co można wykorzystać do manipulacji obiektami lub generacją siły nacisku. Siłowniki to bardzo ważne elementy wykorzystywane w rozwiązaniach pneumatycznych. Źródło zdjęcia. Pneumatyka umożliwia konstrukcji takich jak elastyczne roboty kroczące czy mobilne. W przemyśle pozwala na precyzyjne manipulowanie obiektami za pomocą przyssawek pneumatycznych. Istotnym elementem pracy z takimi urządzeniami jest także symulacja tych systemów. Jednym z narzędzi, które służy do symulacji układów pneumatycznych jest FluidSIM. Czym jest FluidSIM? Jest to oprogramowanie od Festo, które służy do symulacji układów pneumatycznych, hydraulicznych i elektrycznych. Dzięki niemu możemy zaprojektować i zasymulować układ pneumatyczny ze sterowaniem elektrycznym. Oprogramowanie jest bardzo proste i intuicyjne. Jednym z głównych atutów programu jest jego przejrzysty interfejs i metoda projektowania oparta na symbolach, które można łatwo łączyć, tworząc funkcjonalne układy. To sprawia, że FluidSIM jest idealnym narzędziem zarówno dla początkujących, którzy dopiero uczą się zasad działania systemów pneumatycznych i elektrycznych, jak i dla bardziej zaawansowanych użytkowników, chcących szybko prototypować swoje rozwiązania. Program FluidSIM dysponuje szeregiem elementów, których zachowanie można symulować. Źródło logo Festo: FluidSIM Pneumatics V 4.0. Ponadto elementy dostępne w oprogramowaniu posiadają zmienne parametry. Pozwala to na symulację rzeczywistych parametrów urządzeń. Funkcjonalności FluidSIM W artykule opisano funkcjonalności związane z wersją czwartą oprogramowania. FluidSIM oferuje nie tylko możliwość rysowania schematów, ale także ich symulację, co pozwala na pełne testowanie zaprojektowanych układów. Symulację można zatrzymywać i wykonywać krok po kroku. W parametrach symulacji dostępna jest zmiana kolorystyki niektórych elementów (kolor linii ze sprężonym powietrzem/bez, kolor wskazań elementów pod napięciem, kolor próżni). Oprócz tego można modyfikować szybkość symulacji i kompatybilność z Siemens LOGO!Soft. Parametry symulacji. Przykład prostej symulacji. Zgodnie z kolorystyką możemy założyć, że linie, które symbolizują przewody pneumatyczne, są pod ciśnieniem. Po załączeniu zaworu rozdzielającego powietrze znalazło się w komorze siłownika, skutkując wysunięciem tłoczyska. Podczas symulacji istnieje możliwość zapisywania stanów urządzeń w poszczególnych chwilach. Umożliwia to State Diagram. Wygenerowany podczas symulacji diagram funkcyjny. Diagramy funkcyjne można rysować ręcznie za pomocą Functional diagram. Przykład narysowanego diagramu funkcyjnego. Możliwa jest konfiguracja i zmiana parametrów elementów i urządzeń. Oprócz tego w oknie konfiguracyjnym dostosujemy zewnętrzne obciążenia oraz profile siły. Konfiguracja siłownika. W prawym dolnym rogu okna jest widoczny podgląd elementu po zmianie. Parametry siłownika. Znajdziemy tutaj między innymi średnicę tłoka, kąt montażu lub pozycję początkową tłoka. Ustawienie parametrów jest ważne pod kątem testu układu, gdy chcemy zaimplementować rozwiązanie z określonymi urządzeniami. To oczywiście nie są wszystkie dostępne funkcjonalności programu. Oprogramowanie oferuje również materiały edukacyjne na temat pneumatyki oraz wiele więcej, w tym bogatą bibliotekę komponentów. Komponenty FluidSIM FluidSIM oferuje bogaty zestaw urządzeń i komponentów, które umożliwiają tworzenie oraz testowanie zaawansowanych układów. Poniżej znajdziesz listę elementów, które mogą okazać się przydatne podczas projektowania. 1. Źródła oraz elementy związane z doprowadzaniem powietrza. Źródła oraz elementy zasilające w FluidSIM zapewniają dostęp do sprężonego powietrza oraz jego odpowiednie przygotowanie. Dzięki temu możliwe jest tworzenie kompletnych układów, które można następnie odwzorować w rzeczywistych warunkach. Źródło sprężonego powietrza. Zespół przygotowania powietrza. Zespół przygotowania powietrza. Filtr. Chłodnica. Dostępne elementy źródła zasilania pneumatycznego i elementy pokrewne. 2. Urządzenia wykonawcze Pneumatyczne urządzenia wykonawcze to elementy układów pneumatycznych, które przekształcają energię sprężonego powietrza na ruch mechaniczny. Odpowiadają za realizację określonych czynności, takich jak przesuwanie, podnoszenie, dociskanie czy obracanie elementów. Siłownik pneumatyczny jednostronnego działania ze sprężyną. Siłownik pneumatyczny dwustronnego działania. Silnik pneumatyczny o dwóch kierunkach przepływu. Dostępne elementy wykonawcze. Należy pamiętać, że można zmieniać parametry urządzeń i elementów. Na przykład siłownik jednostronnego działania ze sprężyną można przekształcić na dwustronnego działania bez sprężyny i na odwrót. 3. Zawory Istnieje wiele zaworów pneumatycznych, które mają zastosowanie w pneumatyce. Jedne z najpopularniejszych to rozdzielające, dławiąco zwrotne i logiczne. FluidSIM je implementuje i umożliwia za ich pomocą sterowanie pośrednie układami. Zawór rozdzielający 3/2. Zawór dławiąco zwrotny. Zawór podwójnego sygnału (logiczne AND). Część dostępnych zaworów. Dostępnych jest o wiele więcej. Podobnie jak elementy wykonawcze zawory są w pełni konfigurowalne. Konfiguracja zaworu rozdzielającego. 4. Układy elektryczne FluidSIM oferuje symulację elektrycznych układów sterowania. Biblioteka symboli zawarta w programie zawiera bogatą kolekcję elementów, takich jak: przyciski, sensory, przekaźniki, styki, a nawet sterownik PLC oraz regulator PID. Zasilanie elektryczne. Generator funkcyjny. Przycisk. Cewka elektryczna. Moduł logiczny (coś w rodzaju PLC). Regulator PID. Jak widzisz, istnieje wiele elementów i modułów, z których możesz skorzystać. Każdy z nich pełni określoną rolę i może zostać użyty do budowy złożonych symulacji. Kluczem jest ich odpowiednie połączenie i wykorzystanie, aby stworzyć coś funkcjonalnego i interesującego. Zastanówmy się, jak połączyć te moduły w spójną całość i stwórzmy symulację pewnego układu. Przykład symulacji Stwórzmy uproszczoną symulację obrabiarki detali. Urządzenia ma działać z następującym algorytmem: Urządzenie po włączeniu nie wykonuje żadnych ruchów. Po wciśnięciu przycisku START rozpoczyna się proces obrabiania. Jeżeli w którymkolwiek momencie działania algorytmu zostanie wciśnięty przycisk STOP, to wszystkie urządzenia się wyłączają. Siłownik dociska detal do stołu. Po dociśnięciu detalu włącza się silnik elektryczny i zaczyna obrabiać detal. 3 sekundy po załączeniu silnika rozpoczyna się proces wyłączania. W tym momencie wyłącza się silnik. Po 2 sekundach od wyłączenia silnika siłownik wraca na swoją początkową pozycję. Jeżeli masz dostęp do FluidSIM, to spróbuj wykonać taki układ i przeprowadzić kilka symulacji. Jedno z rozwiązań problemu. Powyżej znajduje się jedno z możliwych rozwiązań tego zadania. Po wciśnięciu przycisku START załączy się stycznik K1 podtrzymujący cały proces oraz cewkę K2, która załącza siłownik pneumatyczny. Siłownik ma dwie pozycje. Pozycja ‘A’ to pozycja początkowa, a ‘B’ to pozycja końcowa. Dojazd tłoczyska do pozycji ‘B’ powoduje załączenie się styku ‘B’, który jest stykiem wyłącznika drogowego, co powoduje dołączenie zasilania na silnik. Silnik zaczyna się obracać i obrabiać materiał. W tym momencie załącza się czasówka K3, która po 3 sekundach rozwiera styk NC K3. W rezultacie silnik się zatrzyma. W tym samym czasie zwiera się styk NO K3, który załącza przekaźnik czasowy K4. Ten odlicza 2 sekundy i po tym czasie tłok wraca do swojej pierwotnej pozycji przez rozwarcie styku NC K4 w układzie po lewej stronie. Jeżeli wciśniemy przycisk STOP podczas działania układu, to cały proces zakończy się przed jego ukończeniem. Przykład działania rozwiązania. Podsumowanie Pneumatyka jest kluczową dziedziną inżynierii, mającą szerokie zastosowanie w automatyce przemysłowej, robotyce oraz wielu innych branżach. Współczesne narzędzia, takie jak FluidSIM, umożliwiają modelowanie i testowanie układów pneumatycznych, hydraulicznych i elektrycznych bez potrzeby fizycznej budowy prototypów. Dzięki temu można nie tylko sprawdzać poprawność działania projektów, ale także optymalizować je pod kątem wydajności i oszczędności energii. Warto pamiętać, że nauka symulacji i projektowania w FluidSIM to nie tylko sposób na lepsze zrozumienie pneumatyki, ale także doskonała okazja do rozwijania umiejętności inżynierskich.



































-
- 1
-

-
- automatyka
- Robotyka
- (i 2 więcej)
-
Mój projekt to robot/samochód na module esp32 zawierający kamerę internetową ESP32 CAM. Popularny moduł kamery postanowiłem umieścić na serwomechaniźmie sterowanym zdalnie. Rzecz która moim zdaniem wyróżnia mojego robota jest pilot który tak samo jak robot jest zbudowany na module esp32 ale w wersji Wemos d1, mam na myśli to że większość projektów znalezionych przeze mnie w Internecie do sterowania robotem wykorzystuje telefon co jest prostszym ale mniej dla mnie ekscytującym rozwiązaniem. Początkowo robot miał mieć na swoim pokładzie dobrze znane arduino uno i moduł nrf24 jednak moje umiejętności programistyczne nie pozwoliły mi na wykorzystanie tego Modułu. Prób było wiele jednak za każdym razem nie potrafiłem sparować ze sobą tych dwóch modułów. Nie odpuściłem i postanowiłem wykorzystać właśnie Esp32 na którym już za pierwszym razem wszystko poszło zgodnie z planem. Do komunikacji między modułami wykorzystuję ESP-NOW. Do sterowania silnikami pojazdu użyłem popularnego sterownika silników DC , natomiast do zasilania wykorzystuję 3 ogniwa Lion 3,7V. Poniżej znajduje się kod do zaprogramowania robota : #include <ESP32Servo.h> #include <analogWrite.h> // Samochód na esp 32 sterowany zdalnie // Napęd na 4 koła // Autor: Patryk #include <esp_now.h> #include <WiFi.h> //prawy silnik int enableRightMotor=22; int rightMotorPin1=16; int rightMotorPin2=17; //Lewy silnik int enableLeftMotor=23; int leftMotorPin1=18; int leftMotorPin2=19; int buz = 13; int pos; #define MAX_MOTOR_SPEED 100 const int PWMFreq = 1000; const int PWMResolution = 8; const int rightMotorPWMSpeedChannel = 4; const int leftMotorPWMSpeedChannel = 5; #define SIGNAL_TIMEOUT 1000 //maksymalny czas oczekiwania na sygnał unsigned long lastRecvTime = 0; const int SERVO_PIN = 26 ;// ESP32 pin GPIO26 connected to servo motor Servo servoMotor; struct PacketData { byte xAxisValue; byte yAxisValue; byte xAxisValue2; byte yAxisValue2; byte switchPressed; byte switchPressed2; }; PacketData receiverData; bool throttleAndSteeringMode = false; // funkcja realizowana gdy sygnał jest dostępny void OnDataRecv(const uint8_t * mac, const uint8_t *incomingData, int len) { if (len == 0) { return; } memcpy(&receiverData, incomingData, sizeof(receiverData)); String inputData ; inputData = inputData + "values " + receiverData.xAxisValue + " " + receiverData.yAxisValue + " " + receiverData.switchPressed+ " " + receiverData.xAxisValue2 + " " + receiverData.yAxisValue2 + " " + receiverData.switchPressed2; Serial.println(inputData); simpleMovements(); lastRecvTime = millis(); } void simpleMovements() { if (receiverData.yAxisValue >= 175) //do przodu>= 175 { rotateMotor(MAX_MOTOR_SPEED, MAX_MOTOR_SPEED); } else if (receiverData.yAxisValue <= 75) //do tyłu { rotateMotor(-MAX_MOTOR_SPEED, -MAX_MOTOR_SPEED); } else if (receiverData.xAxisValue >= 175) //prawo { rotateMotor(-MAX_MOTOR_SPEED, MAX_MOTOR_SPEED); } else if (receiverData.xAxisValue <= 75) //lewo { rotateMotor(MAX_MOTOR_SPEED, -MAX_MOTOR_SPEED); } else //Stop { rotateMotor(0, 0); } } void rotateMotor(int rightMotorSpeed, int leftMotorSpeed) { if (rightMotorSpeed < 0) { digitalWrite(rightMotorPin1,LOW); digitalWrite(rightMotorPin2,HIGH); } else if (rightMotorSpeed > 0) { digitalWrite(rightMotorPin1,HIGH); digitalWrite(rightMotorPin2,LOW); } else { digitalWrite(rightMotorPin1,LOW); digitalWrite(rightMotorPin2,LOW); } if (leftMotorSpeed < 0) { digitalWrite(leftMotorPin1,LOW); digitalWrite(leftMotorPin2,HIGH); } else if (leftMotorSpeed > 0) { digitalWrite(leftMotorPin1,HIGH); digitalWrite(leftMotorPin2,LOW); } else { digitalWrite(leftMotorPin1,LOW); digitalWrite(leftMotorPin2,LOW); } ledcWrite(rightMotorPWMSpeedChannel, abs(rightMotorSpeed)); ledcWrite(leftMotorPWMSpeedChannel, abs(leftMotorSpeed)); } void setUpPinModes() { pinMode(enableRightMotor,OUTPUT); pinMode(rightMotorPin1,OUTPUT); pinMode(rightMotorPin2,OUTPUT); pinMode(buz, OUTPUT); pinMode(enableLeftMotor,OUTPUT); pinMode(leftMotorPin1,OUTPUT); pinMode(leftMotorPin2,OUTPUT); servoMotor.attach(SERVO_PIN); //sygnał pwm do sterowania szybkoscią samochodu ledcSetup(rightMotorPWMSpeedChannel, PWMFreq, PWMResolution); ledcSetup(leftMotorPWMSpeedChannel, PWMFreq, PWMResolution); ledcAttachPin(enableRightMotor, rightMotorPWMSpeedChannel); ledcAttachPin(enableLeftMotor, leftMotorPWMSpeedChannel); rotateMotor(0, 0); } void setup() { setUpPinModes(); pos=90; Serial.begin(115200); WiFi.mode(WIFI_STA); // ESP-NOW if (esp_now_init() != ESP_OK) { Serial.println("Error initializing ESP-NOW"); return; } esp_now_register_recv_cb(OnDataRecv); } void loop() { if(receiverData.switchPressed == true){ digitalWrite(buz, HIGH); }else{ digitalWrite(buz, LOW); } //sygnał nieznaleziony unsigned long now = millis(); if ( now - lastRecvTime > SIGNAL_TIMEOUT ) { rotateMotor(0, 0); } servoMotor.write(pos); if(pos<180){ if(receiverData.yAxisValue2>150){ pos++; delay(20); } } if(pos>0){ if(receiverData.yAxisValue2<120){ pos--; delay(20); } } } Mamy robota to teraz czas na kamerę tutaj wykorzystałem już gotowy kod który pozwoli na wyświetlenie obrazu w przeglądarce internetowej. Jedyne co trzeba zrobić to podłączyć się do tego samego Internetu co mamy kamerę i wpisać tam adres IP podany w porcie szeregowym Arduino IDE po wgraniu kodu.Cameraesp32.zip Teraz zajmiemy się pilotem który na swoim pokładzie ma tak jak wspomniałem wcześniej esp32 Wemos d1 mini, dwa joysticki analogowe oraz 5 diod(cztery większe sygnalizują kierunki poruszania robota a jedna mała pomarańczowa, czy robot jest podłączony). Poniżej podrzucam kod: // Pilot do samochodu z użyciem esp32 d1 mini // sterowany joystickiem // Autor: Patryk //esp32 1.0.6 wersja wymagana //WEMOS D1 MINI ESP32 #include <esp_now.h> #include <WiFi.h> #define Gdioda 4 #define Hdioda 27 #define Pdioda 22 #define Ldioda 16 #define ON 17 #define X_AXIS_PIN 33 #define Y_AXIS_PIN 34 #define X_AXIS_PIN2 32 #define Y_AXIS_PIN2 35 #define SWITCH_PIN 26 #define SWITCH_PIN2 25 uint8_t receiverMacAddress[] = {0x3C,0x71,0xBF,0x11,0x70,0x70}; //AC:67:B2:36:7F:28 struct PacketData { byte xAxisValue; byte yAxisValue; byte xAxisValue2; byte yAxisValue2; byte switchPressed; byte switchPressed2; }; PacketData data; int mapAndAdjustJoystickDeadBandValues(int value, bool reverse) { if (value >= 2200) { value = map(value, 2200, 4095, 127, 254); } else if (value <= 1800) { value = map(value, 1800, 0, 127, 0); } else { value = 127; } if (reverse) { value = 254 - value; } return value; } // callback when data is sent void OnDataSent(const uint8_t *mac_addr, esp_now_send_status_t status) { Serial.print("\r\nLast Packet Send Status:\t "); Serial.println(status); Serial.println(status == ESP_NOW_SEND_SUCCESS ? "Message sent" : "Message failed"); if(status == 0){ digitalWrite(ON, HIGH); }else{ digitalWrite(ON, LOW); } } void setup() { Serial.begin(115200); WiFi.mode(WIFI_STA); // Init ESP-NOW if (esp_now_init() != ESP_OK) { Serial.println("Error initializing ESP-NOW"); return; } else { Serial.println("Succes: Initialized ESP-NOW"); } esp_now_register_send_cb(OnDataSent); esp_now_peer_info_t peerInfo; memcpy(peerInfo.peer_addr, receiverMacAddress, 6); peerInfo.channel = 0; peerInfo.encrypt = false; if (esp_now_add_peer(&peerInfo) != ESP_OK) { Serial.println("Failed to add peer"); return; } else { Serial.println("Succes: Added peer"); } pinMode(SWITCH_PIN, INPUT_PULLUP); pinMode(SWITCH_PIN2, INPUT_PULLUP); pinMode(Gdioda, OUTPUT); pinMode(Hdioda, OUTPUT); pinMode(Pdioda, OUTPUT); pinMode(Ldioda, OUTPUT); pinMode(ON, OUTPUT); } void loop() { data.xAxisValue = mapAndAdjustJoystickDeadBandValues(analogRead(X_AXIS_PIN), false); data.yAxisValue = mapAndAdjustJoystickDeadBandValues(analogRead(Y_AXIS_PIN), false); data.xAxisValue2 = mapAndAdjustJoystickDeadBandValues(analogRead(X_AXIS_PIN2), false); data.yAxisValue2 = mapAndAdjustJoystickDeadBandValues(analogRead(Y_AXIS_PIN2), false); data.switchPressed = false; data.switchPressed2 = false; if(mapAndAdjustJoystickDeadBandValues(analogRead(X_AXIS_PIN), false) <100){ digitalWrite(Gdioda, HIGH); }else{ digitalWrite(Gdioda, LOW); } if(mapAndAdjustJoystickDeadBandValues(analogRead(X_AXIS_PIN), false) >150){ digitalWrite(Hdioda, HIGH); }else{ digitalWrite(Hdioda, LOW); } if(mapAndAdjustJoystickDeadBandValues(analogRead(Y_AXIS_PIN), false) <100){ digitalWrite(Pdioda, HIGH); }else{ digitalWrite(Pdioda, LOW); } if(mapAndAdjustJoystickDeadBandValues(analogRead(Y_AXIS_PIN), false) >150){ digitalWrite(Ldioda, HIGH); }else{ digitalWrite(Ldioda, LOW); } if (digitalRead(SWITCH_PIN) == LOW) { data.switchPressed = true; } if (digitalRead(SWITCH_PIN2) == LOW) { data.switchPressed2 = true; } esp_err_t result = esp_now_send(receiverMacAddress, (uint8_t *) &data, sizeof(data)); if (result == ESP_OK) { Serial.println("Sent with success"); } else { Serial.println("Error sending the data"); } if (data.switchPressed == true) { delay(500); } else { delay(50); } } Do pilota zrobiłem własną płytkę pcb więc czemu miałbym się nią nie podzielić. Niżej podrzucam plik gerber do płytki Gerber_esp32-pilot_PCB_esp32-pilot_2025-03-09.zip Napisane kody są oczywiście wgrywane do esp32 za pomocą Arduino IDE, bardzo ważną rzeczą którą muszę podkreślić jest to że do skompilowania tych kodów potrzebujemy bibliotekę płytek esp32 w wersji nie najnowszej a 1.0.6 ponieważ w nowszych wersjach nie ma niektórych zawartych w kodzie funkcji. Na sam koniec podrzucam parę zdjęć z początkowej fazy projektu jeszcze na czystym mostku H bez płytki pcb. Jestem otwarty na jakiekolwiek pytania dotyczące projektu.






-
Witam. Mam problem z odbiornikiem z shielda z kursu robotyki. Gdy naciskam na pilocie jakiś przycisk odbiornik nie reaguje. Pilot działa na kamerce. Przeglądałem forum i nie mam tego pilota: https://botland.com.pl/piloty/7395-pilot-uniwersalny-z-kodowaniem-rc5-5900804048374.html Sprawdziłem napięcie na czujniku i jest ładnie 5v. #define TSOP_PIN 3 #include <RC5.h> RC5 rc5(TSOP_PIN); //Informacja o podłączeniu odbiornika TSOP //Zmienne dla RC5 byte address; byte command; byte toggle; void setup() { Serial.begin(9600); } void loop() { //Jeśli odebrano komendę if (rc5.read(&toggle, &address, &command)) { Serial.print("A:"); Serial.print(address); Serial.print(" K:"); Serial.print(command); Serial.print(" T:"); Serial.println(toggle); } }
-
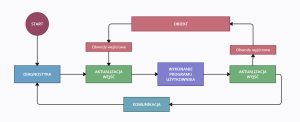
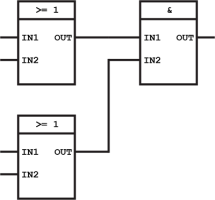
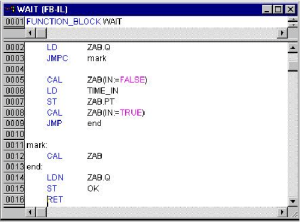
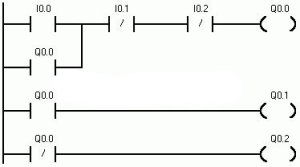
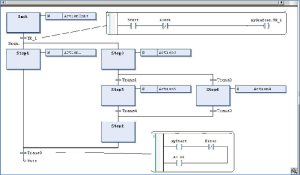
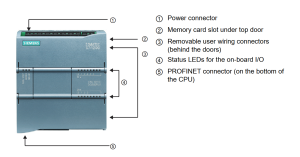
Ciężko sobie wyobrazić świat bez fabryk. Praktycznie wszystko, co nas otacza zostało stworzone z części wyprodukowanych na liniach produkcyjnych, które są coraz bardziej zautomatyzowane. Pozwala to na coraz większą produkcję w coraz krótszym czasie. Jednym z głównych urządzeń współczesnej automatyzacji i automatyki jest sterownik PLC. Szafy sterownicze mogą zawierać sterowniki PLC, które sterują często całymi systemami produkcyjnymi. Źródło zdjęcia. PLC oznacza Programmable Logic Controller co po polsku tłumaczy się jako Sterownik swobodnie programowalny. Jak sama nazwa wskazuje to urządzenie służy do sterowania różnymi procesami. Można go swobodnie programować za pomocą kilku standaryzowanych języków. Kiedyś dominowały układy stycznikowo-przekaźnikowe. One i połączenia między nimi zostały zastąpione jednym, względnie małym urządzeniem - sterownikiem PLC. Jest to rozwiązanie mniej skomplikowane, a w przypadku naprawdę złożonych systemów tańsze. Źródło zdjęcia. Zasada działania sterownika PLC Pętla programowa sterownika to kluczowe pojęcie podczas projektowania algorytmów na sterowniki PLC. Nie wolno go pominąć, bo ta wiedza jest niezbędna do pisania poprawnie działających algorytmów sterowania. Pętlę programową najprościej przedstawić w schemacie blokowym: Cykl programowy PLC. Trzeba go znać! Po Starcie wykonywana jest diagnostyka sterownika. Sprawdzane jest, czy wszystkie elementy sterownika działają poprawnie. Jeżeli na tym etapie coś nie zadziała, to jest to sygnalizowane odpowiednim komunikatem. Aktualizacja wejść następuje na podstawie analizy obwodów wejściowych z obiektu. Na tym etapie sterownik sprawdza, czy np. przycisk jest wciśnięty. Wykonywanie programu użytkownika to proces wykonywania instrukcji, które programista zaprojektował i wgrał do sterownika PLC. Aktualizacja wyjść, czyli inaczej wysterowanie odpowiednich wyjść na podstawie programu i nowych stanów wejść. Sterownik działa na obwody wyjść, które działają na obiekt, np. załączany jest stycznik, który steruje silnikiem. Komunikacja polega na rozmowie PLC z innymi urządzeniami, np. z pulpitami operatorskimi (HMI). Pętla się zamyka. Dlaczego zapamiętanie pętli programowej jest ważne? Wiele funkcji w sterowniku PLC korzysta z tego aspektu, więc żeby zrozumieć jak one działają trzeba najpierw poznać cykl pracy sterownika. Sztandarowym przykładem jest wykrycie zbocza narastającego lub opadającego. Cały cykl pracy sterownika PLC praktycznie trwa 5 - 20 ms. Ten czas może się różnić w zależności od sterownika PLC. Jak zbudowany jest sterownik PLC? Najważniejsze elementy, z których zbudowany jest praktycznie każdy sterownik to: Procesor - mózg urządzenia. Wejścia i wyjścia cyfrowe - działają w logice binarnej. Wyjścia mogą być tranzystorowe i przekaźnikowe. Wejścia i wyjścia analogowe - jeżeli trzeba odczytać wartość wyjściową z potencjometru i przekazać ją dalej, to ten element jest niezbędny do tych operacji. Elementy komunikacyjne - np. Port Ethernet. Służą do przesyłania informacji pomiędzy PLC a innymi urządzeniami. Sterowniki są często modułowe. Rozszerzenia portów I/O (input/output), modułów komunikacyjnych itp. możemy dokładać jak klocki. Sterowniki firmy SIEMENS cieszą się ogromną popularnością. Źródło zdjęcia. Sterowniki PLC muszą spełniać standardy i normy, które zapewnią niezawodność i bezpieczeństwo całego systemu. Jest to rozbudowane urządzenie, które posiada wiele funkcji i jest (często) proste w programowaniu i debugowaniu. Warto nadmienić, że istnieje kolosalna różnica między mikrokontrolerem a sterownikiem PLC. Mikrokontroler może być użyty w PLC. Jest on wtedy mózgiem całego urządzenia. Sterownik PLC może oferować o wiele więcej od pojedynczego mikrokontrolera. Zresztą użycie sterownika PLC spełniającego wiele norm będzie o wiele wygodniejsze od tworzenia sterownika od podstaw korzystając z uC. Taki zabieg zapewnia integralność wszystkich systemów przykładowo na hali produkcyjnej. Korzystając ze sterownika PLC mamy pewność, że inni automatycy także będą umieli naprawiać i konserwować maszynę lub system, który zaprojektowaliśmy. Zastosowanie sterowników PLC PLC możemy spotkać wszędzie tam, gdzie trzeba w jakiś sposób sterować jakimś obiektem. Sterownik swobodnie programowalny może służyć do sterowania: światłami sygnalizacyjnymi na skrzyżowaniu, ruchomymi schodami lub drzwiami obrotowymi w galerii handlowej, maszyną przemysłową, np. prasą hydrauliczną, całą fabryką! Ostatni podpunkt nie jest przesadzony. Bez sterowników PLC dzisiejsze fabryki nie byłyby tak efektywne, jakie są. Jeżeli marzysz o zbudowaniu fabryki nie ruszając się z domu, to powinieneś zainteresować się programem Factory I/O. Nie jest to darmowy program, niemniej daje ogromne możliwości. Na podstawie posiadanego sterownika PLC można zasymulować działanie ogromnych linii produkcyjnych, a nawet manipulatorów przemysłowych. Przykład PLC SIEMENS SIMATIC Na wyróżnienie zasługuje seria SIMATIC firmy SIEMENS, a w szczególność generacja S7. Sterownik SIEMENS SIMATIC S7-1200 jest szeroko rozpowszechnionym sterownikiem, który jest wykorzystywany w wielu branżach. Budowa i wygląd S7-1200. Źródło zdjęcia. W wersji CPU 1214C możemy liczyć na 14 wejść, 10 wyjść i 2 wejścia analogowe. Sterownik można programować w programie TIA Portal (Totally Integrated Automation Portal), w językach typu LD, FBD, ST, o których będzie mowa później. EATON EASYE4 Ciekawym sterownikiem jest EasyE4 Eaton. Posiada on 8 wejść cyfrowych i 4 wyjścia przekaźnikowe. Dodatkowo posiada wyświetlacz, na który możemy również wyświetlać informacje. EATON EASY E4 to tak naprawdę przekaźnik programowalny z cechami PLC! Nazywam go PLC jako uogólnienie i dlatego, że spełnia wiele cech pełnoprawnych sterowników. Warto go przytoczyć jako ciekawostkę i coś wartego uwagi w kontekście tanich i prostych rozwiązań. Mały sterownik PLC. Wyróżnia go prostota. Źródło zdjęcia. Warto o nim wspomnieć, ponieważ jest to idealne rozwiązanie dla prostych i mniej skomplikowanych aplikacji, jak i dla początkujących. Był to PLC, na którym uczyłem się programować i wspominam go bardzo dobrze za prostą obsługę, możliwość wybrania podstawowych języków programowania, jak i za możliwość rozbudowy o wiele modułów rozszerzeń. Sterownik jest względnie tani, a oprogramowanie easySoft oferuje 4 języki: LD, FBD, ST i EDP. Obsługa, programowanie i konfiguracja tego urządzenia jest bardzo prosta i to największy atut tego sterownika. Jak programować sterowniki PLC? Tak jak w przypadku zwykłych języków programowania, korzysta się z IDE. W świecie sterowników najczęściej każdy sterownik ma specjalny program, za pomocą którego można zaprojektować oprogramowanie. Oprócz dwóch wcześniej przeze mnie przytoczonych można również wymienić program GX Developer za pomocą którego można programować sterowniki firmy Mitsubishi. Wiele programów odznacza się ciekawymi i unikatowymi funkcjami. W GX Developer można skorzystać z języka SFC - graficznego języka, który charakteryzuje się przejrzystością napisanego programu. Dodatkowo software daje możliwość zaprogramowania specjalnej funkcji bezpieczeństwa EMERGENCY_OFF, która powoduje powrót do samego początku programu. Wszystkie sterowniki mają jeden wspólną cechę - języki programowania. Języki to nieodłączny element oprogramowania. Źródło zdjęcia. Języki programowania sterowników PLC Języki programowania w automatyce przemysłowej definiuje norma IEC 61131-3, która wyróżnia pięć oficjalnych języków, za pomocą których powinny być programowane sterowniki. Opracowana została przez Międzynarodową Elektrotechniczną Komisję Normalizacyjną (IEC). Jest powszechnie stosowana w globalnym przemyśle. Standard gwarantuje współdziałanie różnych systemów automatyki poprzez wprowadzenie jednolitych zasad programowania. Wyróżnia się 5 języków: 1. Ladder logic (LD lub LAD. Po polsku Język Drabinkowy/Logika Drabinkowa) - najpopularniejszy, graficzny język programowania sterowników PLC. Jego nazwa wzięła się od charakterystycznego wyglądu. Symbole określające wejścia, wyjścia i bloki funkcyjne są ustawione na szeregu poziomych szczebli między dwoma pionowymi szynami, co przypomina drabinę. Program wykonywany jest równolegle od lewej do prawej zgodnie z pętlą programową. Język drabinkowy. Najpopularniejszy język programowania PLC. Źródło zdjęcia. 2. Function block diagram (FBD) - graficzny język, w którym używa się bloków, które odpowiadają za poszczególne instrukcje. Działa na podobnych zasadach co schematy budowane za pomocą bramek logicznych. Język FBD. Jest wygodny w użyciu przy względnie małych programach. Źródło zdjęcia. 3. Sequential function chart (SFC) - ostatni język graficzny wymieniony w normie. Składa się z kroków, do których przypisana jest jakaś akcja. Jeżeli w tym kroku zostanie spełniony ustalony warunek (tzw. tranzycja), to przechodzi się do kolejnego kroku. Oprócz tego każdy program napisany w tym języku musi mieć warunek początkowy, od którego rozpoczyna się cały algorytm. Istnieje możliwość pisania programów, w których kilka kroków może przebiegać równolegle. Do akcji w krokach można wykorzystać język LAD. Język SFC. Bardzo przejrzysty i czytelny język, który można mieszać z językiem LAD. Źródło zdjęcia. 4. Structured text (ST lub STX) - wysokopoziomowy, tekstowy język programowania bazujący na Pascalu. Język posiada pętle, instrukcje warunkowe i funkcje typu pierwiastek kwadratowy i sinus. Język ST. Pozwala implementować skomplikowane algorytmy w zwięzłej formie. Źródło zdjęcia. 5. Instruction list (IL) - niskopoziomowy, tekstowy język oparty na assemblerze. Język IL. Źródło zdjęcia. Jeżeli nauczysz się któregoś z powyższych języków, to programowanie większości sterowników nie powinno Ci sprawić problemów. Wtedy pozostaje tylko kwestia nauczenia się środowiska programistycznego dla konkretnego sterownika. Dodatkowo mogą wystąpić inne symbole reprezentujące zmienne lub dodatkowe funkcje nieoferowane w innych środowiskach. Jak nauczyć się programowania PLC? Oczywistym krokiem jest wybranie się na studia na kierunku automatyka i robotyka/mechatronika. Tam najprawdopodobniej podczas laboratoriów będziesz miał okazję zaprogramować sterownik niejednego producenta. Samoucy mają ciężej. Branża automatyki, a w szczególności sterowników PLC jest dość zamknięta na początkujących. Środowiska do programowania PLC mogą kosztować bardzo dużo, a same sterowniki, sprzęt i narzędzia jeszcze więcej. Bardzo dobrze o tym mówi niemiecki youtuber Jakob Sagatowski w jego filmie o szalonym koszcie programowania PLC. Jest wiele różnych opcji i dróg, które można wybrać. Istnieje wiele kursów i książek na temat programowania PLC. Jeżeli ktoś chciałby spróbować swoich sił w symulacjach programowania PLC, to istnieją takie strony jak plcsimulator. Nie jest to najwyższych lotów symulator, ale sprawdza się w testowaniu na szybko różnych pomysłów. Innym rozwiązaniem jest pobranie TIA PORTAL jako TRIAL lub kupienie taniego sterownika z oprogramowaniem. Z tanich rozwiązań warto wziąć pod uwagę EasyE4 lub Arduino OPTA. Nauka PLC może być trudna, ale też bardzo wynagradzająca. Sterowniki używa się wszędzie i one rządzą dzisiejszymi fabrykami i maszynami. Źródło zdjęcia. Arduino OPTA Zakończę ciekawostką, że Arduino przy współpracy z firmą Finder wydało sterownik PLC. Arduino OPTA występuje w trzech wersjach: Arduino Opta Lite Arduino Opta RS485 - wyposażony w dodatkowy interfejs półdupleksowej łączności RS485 Arduino Opta WiFi - wyposażony w układ komunikacji WiFi / Bluetooth Low Energy (BLE) Na tym sterowniku równolegle mogą pracować skrypt z Arduino IDE i głównego programu PLC, np. w języku ST. Arduino OPTA. Źródło zdjęcia. Podsumowanie Przedstawiłem Ci wiedzę na temat sterowników PLC w pigułce. Pamiętaj, że to dopiero początek. W trakcie nauki natrafisz na takie wątki jak teoria sterowania, regulacja/regulatory, modelowanie procesów i nawet Przemysł 4.0 lub IoT. Bez sterowników PLC nasz świat nie wyglądałby tak jak teraz a poznanie ich na pewno przyda się w niejednej branży.







- 8 odpowiedzi
-
- 4
-
-
- plc
- automatyka
- (i 1 więcej)
-
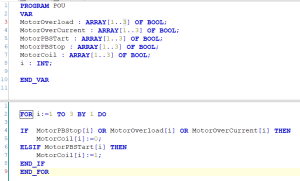
 Przychodzę z pewnym problemem z którym borykam się już od jakiegoś czasu, związanym z mobilnym robotem. Ma to być robot wyposażony w wiele czujników, w tym: 4 czujniki odległości HC-SR04P, listwa z czujnikami odbiciowymi QTR-8A, IMU ICM-20948, 4 przyciski ("ala czujniki dotyku"), LIDAR, kamera, enkodery kwadraturowe. Do odbierania danych z czujników oraz do sterowania silnikami chcę wykorzystać Arduino Mega lub giga r1(niby jest szybyszy ale nie wykorzystuje się jego potencjału jak ię tworzy kod na arduino ide). Dane z Arduino będą przekazywane poprzez kabel usb do Raspberry Pi 4, na którym będzie ROS, oraz do którego podłączone będą LIDAR i kamera. Mam problem głównie z doborem silników do tego robota z powodu konieczności wyposażenia każdego silnika w enkoder. Wszystkie silniki, na jakie natrafiłem, były wyposażone w enkodery inkrementalne (co wymaga 2 pinów do obsługi jednego enkodera). Z tego, co sprawdziłem, aby obsłużyć enkodery, potrzebne są przerwania a arduino potrzebuję czasu aby wszystkie obsłużyć. Poniżej znajduje się kod, który napisałem, aby pomóc sobie przy doborze silników . Orientacyjna masa robota będzie wynosić około 6 kg(dla 4 kół), a koła, które chcę wykorzystać, mają średnicę 10 cm. Ilość kół wpłynie na moment potrzebny do silnika oraz ilość enkoderów. Ma być to robot autonomiczny a więc jeśli zastosuję 4 silniki, zamierzam użyć kół mecanum; jeśli 2, to zwykłe koła i jedno z przodu swobodne; jeśli 3, to koła omnikierunkowe. Dla 4 zwykłych kół nie znalazłem macierzy. #include <stdio.h> int main() { // Deklaracja zmiennych double V, M, N, X=1.5 /* odwrotnosc sprawnosci */, D, g=9.81, u=0.9 /* wspolczynik tarcia */, a=1 /* przyspieszenie liniowe */, t, O; // Wprowadzanie wartości zmiennych printf("Podaj wartość M: "); // masa scanf("%lf", &M); printf("Podaj wartość N: "); // Ilosc kol scanf("%lf", &N); printf("Podaj wartość D :"); // Srednica kola scanf("%lf", &D); printf("Podaj wartość V: "); // Predkosc liniowa scanf("%lf", &V); // Obliczenia zgodnie z podanymi wzorami t = (X * (((u * M * g) + (M * a)) * D) / (2*N)) * 10.19716; // Wymagany moment(z przelicznkiem z Nm na kgfcm) O = X*(2 * V / D) * 9.5493; // Predkosc obrotowa(z przelicznikiem z rad/s na rpm) // Wyświetlenie wyników printf("Wartość t wynosi: %lf\n", t); printf("Wartość O wynosi: %lf\n", O); return 0; } W kodzie nie uwzględniłem kąta równi pochyłej bo robot ma się poruszać po płaskiej powierzchni.Mam także wątpliwości co do współczynnika tarcia, - czy mam wziąć pod uwagę tarcie toczene, czy statyczne.Jeżeli macie także jakieś porady do innych rzeczy związanych z tym robotem będe wdzięczny za podpowiedź i pomoc.
Przychodzę z pewnym problemem z którym borykam się już od jakiegoś czasu, związanym z mobilnym robotem. Ma to być robot wyposażony w wiele czujników, w tym: 4 czujniki odległości HC-SR04P, listwa z czujnikami odbiciowymi QTR-8A, IMU ICM-20948, 4 przyciski ("ala czujniki dotyku"), LIDAR, kamera, enkodery kwadraturowe. Do odbierania danych z czujników oraz do sterowania silnikami chcę wykorzystać Arduino Mega lub giga r1(niby jest szybyszy ale nie wykorzystuje się jego potencjału jak ię tworzy kod na arduino ide). Dane z Arduino będą przekazywane poprzez kabel usb do Raspberry Pi 4, na którym będzie ROS, oraz do którego podłączone będą LIDAR i kamera. Mam problem głównie z doborem silników do tego robota z powodu konieczności wyposażenia każdego silnika w enkoder. Wszystkie silniki, na jakie natrafiłem, były wyposażone w enkodery inkrementalne (co wymaga 2 pinów do obsługi jednego enkodera). Z tego, co sprawdziłem, aby obsłużyć enkodery, potrzebne są przerwania a arduino potrzebuję czasu aby wszystkie obsłużyć. Poniżej znajduje się kod, który napisałem, aby pomóc sobie przy doborze silników . Orientacyjna masa robota będzie wynosić około 6 kg(dla 4 kół), a koła, które chcę wykorzystać, mają średnicę 10 cm. Ilość kół wpłynie na moment potrzebny do silnika oraz ilość enkoderów. Ma być to robot autonomiczny a więc jeśli zastosuję 4 silniki, zamierzam użyć kół mecanum; jeśli 2, to zwykłe koła i jedno z przodu swobodne; jeśli 3, to koła omnikierunkowe. Dla 4 zwykłych kół nie znalazłem macierzy. #include <stdio.h> int main() { // Deklaracja zmiennych double V, M, N, X=1.5 /* odwrotnosc sprawnosci */, D, g=9.81, u=0.9 /* wspolczynik tarcia */, a=1 /* przyspieszenie liniowe */, t, O; // Wprowadzanie wartości zmiennych printf("Podaj wartość M: "); // masa scanf("%lf", &M); printf("Podaj wartość N: "); // Ilosc kol scanf("%lf", &N); printf("Podaj wartość D :"); // Srednica kola scanf("%lf", &D); printf("Podaj wartość V: "); // Predkosc liniowa scanf("%lf", &V); // Obliczenia zgodnie z podanymi wzorami t = (X * (((u * M * g) + (M * a)) * D) / (2*N)) * 10.19716; // Wymagany moment(z przelicznkiem z Nm na kgfcm) O = X*(2 * V / D) * 9.5493; // Predkosc obrotowa(z przelicznikiem z rad/s na rpm) // Wyświetlenie wyników printf("Wartość t wynosi: %lf\n", t); printf("Wartość O wynosi: %lf\n", O); return 0; } W kodzie nie uwzględniłem kąta równi pochyłej bo robot ma się poruszać po płaskiej powierzchni.Mam także wątpliwości co do współczynnika tarcia, - czy mam wziąć pod uwagę tarcie toczene, czy statyczne.Jeżeli macie także jakieś porady do innych rzeczy związanych z tym robotem będe wdzięczny za podpowiedź i pomoc. -
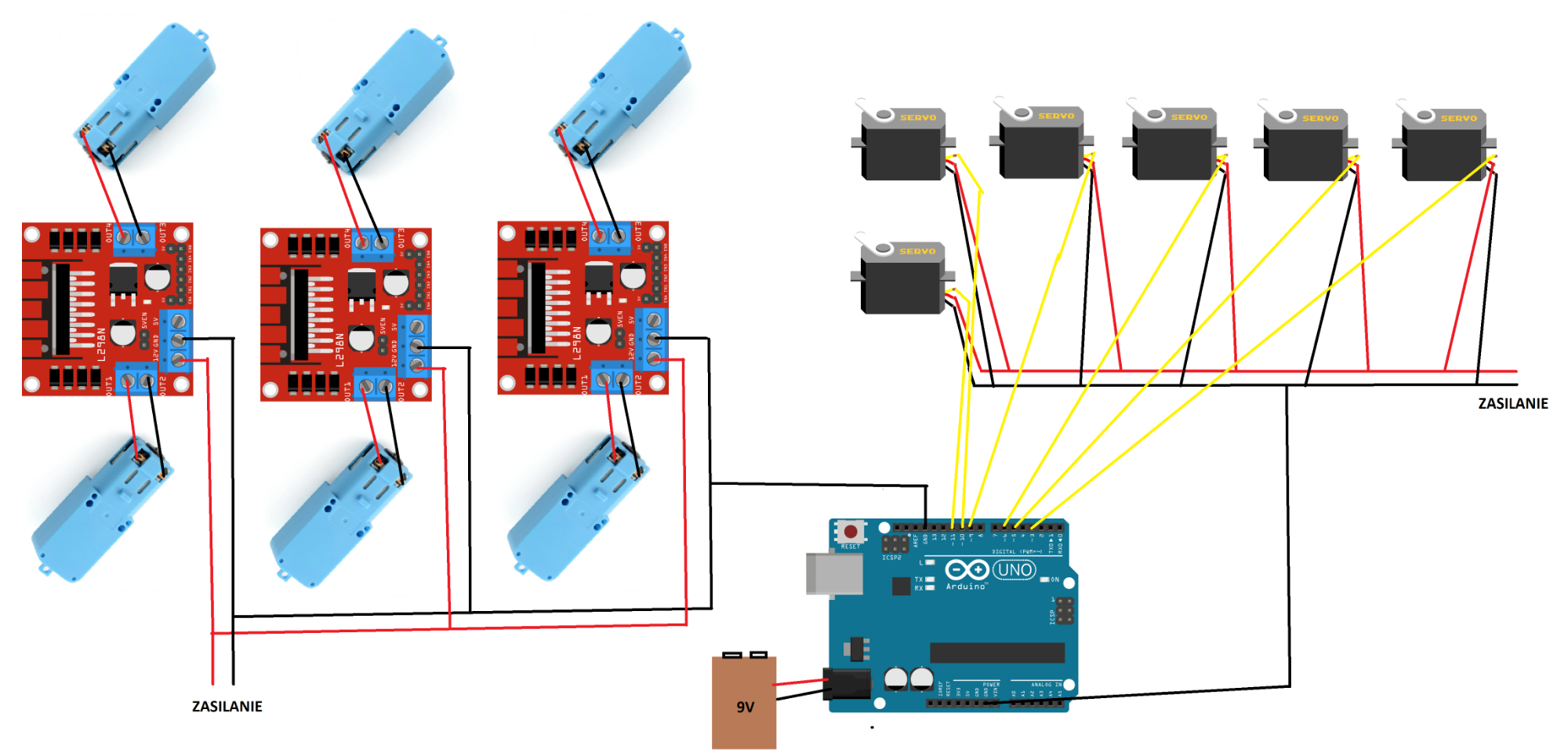
Mam problem z podłączeniem do arduino mega modułu HC-06, w moim układzie mam 2 silniki i jeszcze będę musiał dodać 6 serwomechanizmów co zajmie mi wszystkie piny PWM a mój moduł bluetooth z jakiegoś powodu działa tylko na pinach 2-13. Jak to naprawić? #include <SoftwareSerial.h> #define BT_TX 0 #define BT_RX 1 SoftwareSerial bt(BT_TX, BT_RX); char x; void setup() { dht.begin(); pinMode(2,OUTPUT); pinMode(4,OUTPUT); pinMode(5,OUTPUT); pinMode(7,OUTPUT); bt.begin(9600); } void loop() { digitalWrite(3,255); digitalWrite(6,255); if(bt.available()){ x = bt.read(); bt.println(x); } if(x == 'B'){ digitalWrite(4,HIGH); digitalWrite(5,HIGH); } else if(x == 'F'){ digitalWrite(2,HIGH); digitalWrite(7,HIGH); } else if(x == 'L'){ digitalWrite(2,HIGH); digitalWrite(5,HIGH); } else if(x == 'R'){ digitalWrite(7,HIGH); digitalWrite(4,HIGH); } else if(x == 'S'){ digitalWrite(2,LOW); digitalWrite(4,LOW); digitalWrite(5,LOW); digitalWrite(7,LOW); } delay(100); }
-
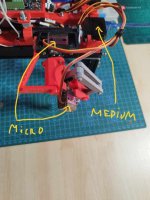
Cześć, zbudowałem robota kroczącego składającego się z 12 serw. 4x serwo typu medium (Power HD HD-1160A z plastikowymi przekładniami) i 8x serwo typu micro (MG-90S z metalowymi przekładniami), serwa zasilane są battery Packiem (4x bateria AA 1,5V) 6V oraz Arduino mega, które zasilam 5V. Po wykonaniu dwóch kroków robot się zapada i serwa medium się wyłączają (serwa umieszczone na ramie robota) a serwa micro działają i wykonują dalsze ruchy nogi. Podejrzewam, że problem leży przy zasilaniu robota, battery pack dodaje masy do robota i może być niezbyt optymalnym źródłem prądu. Po podłączeniu woltomierza, miernik pokazywał ~5V zamiast wymaganego 6V. Drugim problemem mogą być serwera medium, jakich używam, przy 6V ruch obrotowy serwa wynosi 2,7 kg*cm a serwa micro nogi mają 2,2 kg*cm również przy 6V. Po ściągnięciu battery packa, robot działał dobrze do pewnego momentu, gdy się zawalił, serwa przestały być „naprężone” co wynikało by z braku odpowiedniego zasilania. Czy ktoś z Was wie, gdzie może leżeć przyczyna problemu? Z góry dziękuje. Film z działania robota oraz zdjęcie nogi w załącznkiu poniżej:
.thumb.gif.c2c9bb5f5555557ab50711a524a00ad6.gif)
-
Cześć, chcemy przedstawić wam projekt robota kroczącego Honey Badger. Na początek powiemy krótko o tym kim jesteśmy, naszej historii i czym się zajmujemy, następnie przedstawimy naszą najnowszą konstrukcję. Od razu dodamy, że jeśli będziecie mieli jakieś pytania to śmiało zadawajcie je w komentarzach - postaramy się na wszystkie odpowiedzieć MAB Robotics założyliśmy z myślą o komercjalizacji technologii robotów mobilnych i technologii napędowych dla robotyki w 2019. Sam pomysł i prace nad budową robotów kroczących rozpoczęliśmy już w trakcie studiów na Politechnice Poznańskiej gdy byliśmy członkami koła naukowego KN Mechatron. Pierwszy prototyp robota pokazał, że tego typu konstrukcje, w niektórych warunkach mają lepsze możliwości ruchowe niż dotychczas najpopularniejsze na lądzie roboty jeżdżące. Z pomocą dr inż. Krzysztofa Walasa (wykładowcy robotyki na Politechnice Poznańskiej), zdobyliśmy finansowanie z Akademickiego Inkubatora PP i w efekcie w 2019 roku powstała spółka MAB Robotics. Rok później zainwestował w nas fundusz inwestycyjny YouNick Mint co pozwoliło na przejście ze studenckiego projektu w firmę zajmującą się zaawansowanymi pracami badawczo rozwojowymi w obszarze robotyki i rozpoczęcie działań związanych z komercjalizacją opracowanych technologii. Dużą motywacją do działań był udział i nagrody jakie zdobywaliśmy w zawodach robotycznych w Polsce i za granicą - głównie w kategorii freestyle. Z naszymi robotami byliśmy m.in. na RoboticArena we Wrocławiu, Trójmiejskim Turnieju Robotów w Gdańsku, Sumo Challenge w Łodzi, Robomaticon w Warszawie, ROBOCOMP w Krakowie czy Robot Challenge w Pekinie. Niemal wszędzie zdobywaliśmy nagrody, zawsze poznawaliśmy ciekawych ludzi i gromadziliśmy bezcenne doświadczenie. Dziś pracujemy nad systemem inspekcyjnym, którego jedną z części jest robot Honey Badger. System rozwijany jest z myślą o prowadzeniu prac inspekcyjnychi serwisowych wewnątrz podziemnych sieci jakie występują pod ulicami każdego miasta. Obecnie wykorzystywane technologie, oparte najczęściej o jeżdżące platformy nie pozwalają dostać się wszędzie, mają stosunkowo niewielki zasięg i są drogie w użyciu. Dzięki przejściu z kół na nogi roboty MAB Robotics będą w stanie wejść niemal w każde miejsce, niosąc na grzbiecie sensory analizujące stan techniczny instalacji oraz narzędzia umożliwiające wykonywanie drobnych prac naprawczych od wewnątrz - pozwala to ograniczyć wykopy i prace drogowe w na ulicach miast. Teraz ta, pewnie ciekawsza część dotycząca technologii, którą zaczniemy od krótkiej prezentacji najnowszego robota: Zaprezentowany robot Honey Badger posiada 12 stopni swobody - po 3 na każdą z nóg. Napędy zbudowane są z silnika bezszczotkowego, przekładni planetarnej i sterownika silnika MD80. Taki rodzaj napędu dostarcza wystarczającego momentu obrotowego aby unieść robota i jednocześnie zapewnia wysoką dynamikę umożliwiającą np. podskoki. Istotnym aspektem jest wirtualna podatność napędu realizowana przez sterowanie impedancyjne. Dzięki odpowiedniemu sterowaniu, silnik symuluje dynamikę sprężyny. Korpus robota jest wodo i pyłoszczelny, dzięki czemu robot może pracować w trudnym środowisku nieprzyjaznym dla elektroniki - utrudnia to jednak chłodzenie układów. Wewnątrz znajduje się komputer sterujący lokomocją robota oraz dodatkowa jednostka umożliwiająca przetwarzanie danych z sensorów takich jak np. kamera głębi lub lidar. W korpus wbudowana jest również bateria, moduł komunikacyjny, moduł zarządzania energią i AHRS. Cała konstrukcja mechaniczna i wszystkie moduły elektroniczne zostały zaprojektowane przez zespół MAB. Elementy mechaniczne wykonane są metodami obróbki CNC aluminium i włókna węglowego dla elementów przenoszących obciążenia oraz druku 3D dla elementów stylistycznych oraz nieprzynoszących dużych obciążeń jak np. prowadniki przewodów wewnątrz korpusu. Wymiary robota to 0.25-0.5x0.4x0.6 [m] (HxWxL), a jego masa to 10kg. Robot ma gabaryty niewielkiego psa lub dużego kota, zależnie od preferencji Robot do swojej pracy wykorzystuje kilka sensorów. W napędy wbudowane są enkodery zwracające pozycję kątową napędu oraz elektronika, która pozwala na estymację momentu obrotowego generowanego przez napęd - wiemy dzięki temu z jaką siłą stopa robota naciska na podłoże. Dodatkowo, moduł AHRS wewnątrz korpusu wskazuje pozycję kątową oraz pozwala określić przemieszczenia i prędkości korpusu względem świata. Podstawą oprogramowania jest firmware mikrokontrolerów we wszystkich modułach robota. Odpowiada m.in. za sterowanie silnikami, kontrolę zasilania oraz komunikację między układami - napisany jest w języku C, na platformie STM32. Następny poziom to software sterujący pracą robota - tutaj liczone jest jak robot ma poruszać nogami by podążać w wyznaczonym kierunku z zadaną prędkością zachowując równowagę. Najwyższy poziom to oprogramowania wyznacza ścieżkę ruchu robota, analizuje otoczenie i interpretuje polecenia operatora. Dwa ostatnie poziomy wykorzystują ROS2 co bardzo ułatwia pracę i daje wiele możliwości, wykorzystujemy tutaj C++. Na zakończenie ostatni filmik Mamy nadzieję, że temat jest dla was ciekawy, trochę dowiedzieliście się z tego krótkiego wpisu i zmotywowaliśmy was do dalszej (lub rozpoczęcia) pracy z robotami. Jeśli macie pytania to chętnie na nie odpowiemy! Serdecznie zapraszamy: - do zwiedzenia naszej strony internetowej: MAB Robotics, - na nasz kanał na YouTube, gdzie wrzucamy dłuższe filmy, - na nasze social media: instagram, facebook i twitter.


- 7 odpowiedzi
-
- 19
-
-
-
 Dzień dobry, Sprzedam platformę jezdną pod robota Dagu Wild Thumper 6WD wraz z silnikami z przekładnią 75:1. Do tego dorzucam sterownik do silników MDD20A od firmy Cytron. Również załączam w zestawie ramię zasilane dwoma serwami 9g sg90 i czujnik ultradźwiękowy HC-SR04. Idealna podstawa pod programowanie jezdnego robota, wystarczy dorzucić rasberry czy inną płytkę oraz zasilanie i mamy gotowego robota. Wszystko jest porzadnie podłączone i połączone. Wyprowadziłem również opcje montażu baterii LiPo poprzez zwykły Plug-In. Dorzucam również GRATIS dwa dodatkowe koła. Cena jaka mnie interesuje to 1400 zł. Mogę wystawić poprzez platformę sprzedażową. W innym wypadku płatność tylko i wyłącznie z góry. Pozdrawiam!
Dzień dobry, Sprzedam platformę jezdną pod robota Dagu Wild Thumper 6WD wraz z silnikami z przekładnią 75:1. Do tego dorzucam sterownik do silników MDD20A od firmy Cytron. Również załączam w zestawie ramię zasilane dwoma serwami 9g sg90 i czujnik ultradźwiękowy HC-SR04. Idealna podstawa pod programowanie jezdnego robota, wystarczy dorzucić rasberry czy inną płytkę oraz zasilanie i mamy gotowego robota. Wszystko jest porzadnie podłączone i połączone. Wyprowadziłem również opcje montażu baterii LiPo poprzez zwykły Plug-In. Dorzucam również GRATIS dwa dodatkowe koła. Cena jaka mnie interesuje to 1400 zł. Mogę wystawić poprzez platformę sprzedażową. W innym wypadku płatność tylko i wyłącznie z góry. Pozdrawiam!





-
Witam Mam pytanie odnośnie doboru części do robota. Sytuacja wygląda tak mam zakupione podwodzie do robota z kołami mecanum, silnikami DC z przekładnią jeden do 1:48, Napięcie zasilania 3V-6V, Pobór prądu 170 mA. W robocie mam zamiar użyć Arduino i sterować nim z telefonu przez Bluetooth. Pytanie pierwsze: Czy jeśli chce użyć sterowników L298N do sterowania silnikami to potrzebuję jakiś przetwornic step down, żeby nie spalić silników i sterowników, jeżeli wymagane źródło napięcia okazałoby się większe niż 6V? Pytanie drugie: Jakiego źródła zasilania najlepiej użyć do tego przedsięwzięcia? Pytanie Trzecie: Jakiego modułu Bluetooth użyć do tego najlepiej (chodzi mi o to żeby sterować silnikami z telefonu)? Widziałem że większość projektów z Arduino, bo korzysta z HC-05. Czy HC-05 to dobory wybór dla laika?
-
Cześć, niedawno zacząłem budowę łazika z napędem na 6 kół (każde z nich skrętne, stąd 6 serw), całość będzie drukowana w 3D i sterowana przez Arduino Uno. Podczas projektowania obwodu napotkałem problem dotyczący zasilania, poniżej wklejam schemat (bez połączenia przewodów sygnałowych do L298N). Silniki to mocniejsze odpowiedniki tych małych żółtych silników. Producent podaje napięcie 3V-6V (sam myślałem żeby je troszkę zwiększyć, ponieważ w moim układzie będą dość mocno obciążone) a pobór prądu to (przy zatrzymanym wale) do 1,2A. Dlatego wybrałem takie sterowniki. Serwa to Tower Pro MG90S (są to serwa typu micro). A do sterowania całością planuję użyć Arduino Uno. I tu pojawia się problem ponieważ L298N mają spadek napięcia 2V. Więc akumulator/bateria 6V odpada. Myślałem nad tym żeby serwa osobno były zasilane z 4x AA. A silniki z 6x AA. Tylko czy z takich 6 baterii można pobrać max ok. 7A. A z 4 do ok. 5. Do silników można było by użyć też jakiś ogniw, takich jak np. w bateriach do laptopów. Pozostaje jeszcze zasilanie Arduino. Jak wy byście to rozwiązali? Mnie najbardziej przekonują baterie. Z góry dziękuje za pomoc Filip
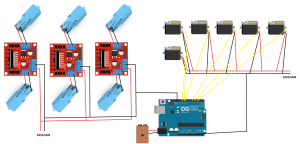
-
Robot który zbudowałem na sobotnie zawody okazało się że w losowych momentach na trasie przestaje jechać. Zatrzymuje się na kilka sekund i czasem rusza znowu a czasem słychać tylko pyknięcie, robot minimalnie drgnie i dalej się zawiesza. Podczas tych zawieszeń diody rx, tx i wbudowana przestają migać, świeci się dioda ON oraz diody sygnalizujące prawidłowy przepływ prądu w 2 miejscach na 2 płytkach. Zwykle pomaga reset ale muszę rozwiązać problem jak najszybciej bo zawody są już w tą sobotę a muszę jeszcze przeprowadzić testy. Więcej o robocie: Typowa konstrukcja z dwoma kołami z tyłu i platformą z 8 czujnikami z przodu Silniki to polulu hp micro z przekładnią file:///C:/Users/Admin/Downloads/Photo-1.jpeg1:10 Zasilane akumulatorem lipo 500mah 11,1V po stabilizatorze na 6V Użyty jest sterownik silników 2-kanałowy sparkfun Algorytm to zwykły PID (po odkryciu problemu zredukowany do samego P i sprawdzony, problem raczej nie leży po stronie programu) Sprawdziłem: po podpięciu przez kabel (bez akumulatora) - działa gdy koła są w powietrzu- działa gdy zablokuję koła- działa gdy zablokuję koła i przyłożę do podłoża czujniki- nie działa PS testy powyżej są dla bardzo niskiej prędkości, około 25% maksymalnej prędkości silników. Po zwiększeniu zadanej prędkości silniki kompletnie odmawiają współpracy.

-

Budowa pierwszego robota typu LineFollower - jakie rady?
mechas opublikował temat w Zupełnie zieloni
Siemanko! Przychodzę do was z takim tematem. Wraz z kolegą planujemy zbudować pierwszego robota, którym ma być linefollower. Jak wspomniałem będzie to pierwszy nasz projekt tego typu no i właśnie. Czy macie jakieś rady dla nowicjuszy? Na co uważać, co polecacie itd. Jeśli chodzi o uC myślałem nad STM32F7 lub G4, ale narazie to tylko plany. Jestem otwarty na sugestie i chętnie pogadam z bardziej doświadczonymi. Pozdroo -
 Witam, Jestem w 8 klasie (co pewnie da się wyczuć ) i robię robota, który omijałby przeszkody i wracał na trasę z wykorzystaniem HC-SR04 i MPU-6050. Używam też shielda od forbota, omawianego w kursie robotyki. Nieruchomy czujnik działa prawidłowo, ale kiedy obraca się na serwie, w pozycjach około prostopadłych do tylnej osi daje odczyt 0 cm. Pozostałe odczyty są poprawne, samo podłączenie czujnika też jest w porządku, bo działa bardzo dobrze będąc nieruchomym. Założenie jest takie, żeby czujnik zamontowany na serwie wykonywał pomiary odległości wokół robota, a następnie aby serwo obróciło się tam, gdzie odległość była najmniejsza (to pozwala cały czas monitorować najbliższą przeszkodę). Cały ,,układ" jest bardzo prosty, w zasadzie można go zreplikować w 5 minut i potestować z moim kodem. Poza tym, zamieszczony plik .zip to minutowy film, który pokazuje zarówno ruchy serwa, jak i odczyty podawane na port szeregowy (Forobot nie pozwala na przesyłanie .mp4). Cały kod zdaje się działać dobrze, jedynym problemem jest to, że pomiary bywają zerowe, co sprawia, że czujnik zachowuje się bez sensu. Myślałem nad dodaniem prostego warunku: ,,Jeżeli zmierzona odległość byłaby mniejsza od minimalnej i jednocześnie większa od zera, wtedy zapisujemy ją jako nową minimalną wartość". W moim kodzie wyglądałoby to tak: if (odleglosci[x] < min_odleglosc && odleglosci[x] > 0) min_odleglosc = odleglosci[x]; Niestety, w tym przypadku robot zupełnie nie wykrywałby przeszkód bezpośrednio naprzeciwko niego, bo otrzymywałby tam pomiary 0 cm (rysunek w załącznikach). Czy ktoś wie, jak naprawić kod/elektronikę? Z góry dziękuję za pomoc. Połączenia czujnik - Arduino: Vcc - 5V Gnd - Gnd trig - D8 echo - D7 //w przod - (R_DIR, 1), (L_DIR, 0). Min. predkosc silnikow to 20 w funkcji Left- i Rightmotor. RightMotor - słabszy //w accelerate dodac zczytywanie obecnej v i porownywac z poprzednia v, plynnie zwalniac //tak naprawde wystarcza dwie zmienne: aktualna_odleglosc i max_odleglosc. Jezeli aktualna_odleglosc > max_odleglosc, staje sie max_odleglosc. Jesli nie, w ogole jej nie potrzebujemy #define L_PWM 5 #define L_DIR 4 #define R_PWM 6 #define R_DIR 9 #define PWM_MAX 165 #define v_min 20 #define trig 8 #define echo 7 #define SERWO_PIN 11 #include <Servo.h> Servo serwo; float odleglosc; float LeftMotorMargin = 5; int max_odleglosc_global = 0; int min_odleglosc_global = 100; int min_odleglosc = 100; int max_odleglosc = 0; int odleglosci [20]; int powtorzenia = 0; int v_previous = 0; int j, x; int do_usuniecia = 0; int poprzedni_kat_serwa; int czestotliwosc_obrotu_serwa = 18; int int_numer_pomiaru; void LeftMotor (int v)//funkcja sterująca silnikiem lewym z jednym argumentem, prędkością. { if (v>0) //jeżeli podana wartość jest dodatnia { v+=LeftMotorMargin; v = map(v,0,100,0,PWM_MAX);//zmieniamy wartość podaną w programie na PWM digitalWrite (L_DIR, 0);//wyznaczamy kierunek - do przodu analogWrite (L_PWM, v);//PWM równy temu, co wyznaczył uzytkownik } else//jeżeli podana liczba jest ujemna { v = abs(v);//zamieniamy liczbę na dodatnią v+=LeftMotorMargin; //v = v - LeftMotorMargin; v = map(v,0,100,0,PWM_MAX);//zmieniamy podaną wartość na PWM digitalWrite (L_DIR, 1);//wyznaczamy kierunek - do tyłu analogWrite (L_PWM, v);//PWM równy temu, co wyznaczył użytkownik } } void RightMotor (int v)//analogiocznie do lewego silnika { if (v>0) { v = map(v,0,100,0,PWM_MAX); digitalWrite (R_DIR, 1); analogWrite (R_PWM, v); } else { v = abs(v); v = map(v,0,100,0,PWM_MAX); digitalWrite (R_DIR, 0); analogWrite (R_PWM, v); } } void stopMotors()//zatrzymanie silników { analogWrite(L_PWM, 0); analogWrite(R_PWM,0); } void accelerate (int v)//funkcja na płynne przyspieszanie i zwalnianie { if (abs(v)<20)//jeżeli podana liczba jest mniejsza niż 20 { v=20; //prędkość równa się 20 (unikamy prędkości zbyt małych, by ruszyć). } Serial.println (v); if (v>v_previous)//jeżeli przyspieszamy { for (int i = v_previous; i<v; i++)//zacznij od poprzedniej wartości, zwiększaj do wyznaczonej do wyznaczonej { RightMotor(i);//do przodu LeftMotor(i); delay(50); } } if (v<v_previous)//jeżeli zwalniamy { for (int i=v_previous; i>v; i--)//zacznij od wartości poprzedniej, zmniejszaj do wyznaczonej { RightMotor(i); LeftMotor(i); delay(50); } } v_previous = v;//zapisz obecną wartość jako wyznaczoną } float pomiar_odleglosci () { float odleglosc, czas; digitalWrite (trig, LOW); delayMicroseconds (2); digitalWrite (trig, HIGH); delayMicroseconds (10); digitalWrite (trig, LOW); czas = pulseIn (echo, HIGH); odleglosc = czas / 58; return odleglosc; } void serwo_right () { min_odleglosc = 100; for (int i = poprzedni_kat_serwa; i>0; i--) { serwo.write(i); delay(10); //czujnik wychyla sie w prawo, resetujemy min_odleglosc } poprzedni_kat_serwa = serwo.read(); } void serwo_left () { odleglosci[x] = pomiar_odleglosci (); Serial.println ("odleglosc prawa"); Serial.println (x); Serial.println (odleglosci[x]); x++;//wykonujemy pierwszy pomiar (w innym wypadku miałby on miejsce dopiero po wychyleniu serwa o czestotliwosc_obrotu_serwa, czyli 18 stopni) for (int i = poprzedni_kat_serwa; i<=180; i++) { //posuwamy sie az do skrajnie lewego wychylenia (zaczynamy ze skrajnie prawego) if (x>180/czestotliwosc_obrotu_serwa) x=0; //jezeli wykonalismy pelen cykl pomiarow resetujemy ich licznik if (j>=czestotliwosc_obrotu_serwa)//kiedy czujnik skrecil o kat podany jako czestotliwosc_pomiaru (kiedy trzeba wykonac pomiar) { j=0; //resestujemy licznik umozliwiajacy wykonanie pomiaru co czestotliwosc_pomiaru odleglosci[x] = pomiar_odleglosci();//wykonujemy pomiar if (odleglosci[x]>max_odleglosc)//jezeli aktualna odleglosc jest wieksza od zapisanej jako najwieksza odleglosc, staje sie nowa najwieksza odlegloscia max_odleglosc = odleglosci[x]; if (odleglosci[x]<min_odleglosc)//jezeli aktualna odleglosc jest mniejsza od zapisanej jako najmniejsza odleglosc min_odleglosc = odleglosci[x]; if (i < 90)//kiedy czujnik jest wychylony w lewo { Serial.println ("odleglosc prawa");//wypisujemy aktualna odleglosc Serial.println (x); Serial.println (odleglosci[x]); }else //kiedy czujnik jest wychylony w prawo { Serial.println ("odleglosc lewa"); //wypisujemy aktualna odleglosc Serial.println (x); Serial.println (odleglosci[x]); } x++; //zwiekszamy licznik pomiarow } //Serial.print ("Kat serwa = "); opcjonalnie mozna odkomentowac, pozwala zobaczyc kat serwa //Serial.println (serwo.read()); serwo.write(i);//przesuwamy serwo j++;//zmieniamy licznik przesuniec, dzieki temu mozemy robic pomiary kiedy osiognie wartosc = czestotliwosc_pomiaru delay(10); } poprzedni_kat_serwa = serwo.read();//zapisujemy obecny kat obrotu jako poprzedni_kat_serwo, co pomaga w wykonywaniu innych obrotow } void serwo_mid ()//kierujemy serwo do pozycji prostopadlej do tylnej do osi { if (poprzedni_kat_serwa > 90)//jezeli serwo jest zwrocone w lewo { for (int i = poprzedni_kat_serwa; i>90; i--)//zmniejszamy, czyli idziemy do prawej { serwo.write(i); } }else //kiedy serwo jest zwrocone w lewo { for (int i = poprzedni_kat_serwa; i<90; i++)//zwiekszamy, czyli idziemy do lewej { serwo.write(i); } } poprzedni_kat_serwa = serwo.read();//zapisujemy obecny kat obrotu jako poprzedni_kat_serwo, co pomaga w wykonywaniu innych obrotow } void zadany_obrot (int kat)//obrot serwa do zadanego katu { if (poprzedni_kat_serwa > kat)//jezeli zadany kat jest na prawo od obecnego { for (int i = poprzedni_kat_serwa; i>kat; i--)//skrecamy serwo w prawo { serwo.write(i); } }else //jezeli zadany kat jest na lewo od obecnego { for (int i = poprzedni_kat_serwa; i<kat; i++)//skrecamy serwo w lewo { serwo.write(i); } } poprzedni_kat_serwa = serwo.read();//zapisujemy obecny kat obrotu jako poprzedni_kat_serwo, co pomaga w wykonywaniu innych obrotow } int numer_pomiaru ()//zczytujemy tablice odleglosci[] (wyniki pomiarow) i szukamy tego, ktory jest najmniejszy { for (int i = 0; i <180/czestotliwosc_obrotu_serwa; i++)//przeszukujemy wszystkie pomiary { if (odleglosci[i] == min_odleglosc)//jezeli odleglosc o numerze 'i' jest najmniejsza { return i;//zwracamy numer pomiaru } } } float pomiar_odleglosci_serwo()//uzywamy trzech wyzej opisanych funkcji do zrobienia pomiaru odleglosci { serwo_right(); serwo_left(); serwo_mid(); return min_odleglosc; } void setup() { //definicja pinow, start komunikacji pinMode(L_DIR, OUTPUT); pinMode(R_DIR, OUTPUT); pinMode(L_PWM, OUTPUT); pinMode(R_PWM, OUTPUT); pinMode (trig, OUTPUT); pinMode (echo, INPUT); serwo.attach(SERWO_PIN); Serial.begin (9600); serwo_mid(); } void loop() { //wypisywanie wynikow pomiarow w porcie szeregowym Serial.println ("Pomiar odleglosci"); min_odleglosc_global = pomiar_odleglosci_serwo();//sprawdzamy odleglosci od przeszkod wokol robota delay(1000); int_numer_pomiaru = numer_pomiaru();//znajdujemy najmniejszy pomiar Serial.println ("numer pomiaru"); Serial.println (int_numer_pomiaru); Serial.println ("min_odleglosc"); Serial.println (min_odleglosc_global); delay(1000); Serial.println ("zadany obrot"); zadany_obrot(int_numer_pomiaru*czestotliwosc_obrotu_serwa);//obracamy serwo do kata, na ktorym byl najmniejszy pomiar Serial.println ("kat"); Serial.println (int_numer_pomiaru*czestotliwosc_obrotu_serwa); } film z dzialania robota.zip
Witam, Jestem w 8 klasie (co pewnie da się wyczuć ) i robię robota, który omijałby przeszkody i wracał na trasę z wykorzystaniem HC-SR04 i MPU-6050. Używam też shielda od forbota, omawianego w kursie robotyki. Nieruchomy czujnik działa prawidłowo, ale kiedy obraca się na serwie, w pozycjach około prostopadłych do tylnej osi daje odczyt 0 cm. Pozostałe odczyty są poprawne, samo podłączenie czujnika też jest w porządku, bo działa bardzo dobrze będąc nieruchomym. Założenie jest takie, żeby czujnik zamontowany na serwie wykonywał pomiary odległości wokół robota, a następnie aby serwo obróciło się tam, gdzie odległość była najmniejsza (to pozwala cały czas monitorować najbliższą przeszkodę). Cały ,,układ" jest bardzo prosty, w zasadzie można go zreplikować w 5 minut i potestować z moim kodem. Poza tym, zamieszczony plik .zip to minutowy film, który pokazuje zarówno ruchy serwa, jak i odczyty podawane na port szeregowy (Forobot nie pozwala na przesyłanie .mp4). Cały kod zdaje się działać dobrze, jedynym problemem jest to, że pomiary bywają zerowe, co sprawia, że czujnik zachowuje się bez sensu. Myślałem nad dodaniem prostego warunku: ,,Jeżeli zmierzona odległość byłaby mniejsza od minimalnej i jednocześnie większa od zera, wtedy zapisujemy ją jako nową minimalną wartość". W moim kodzie wyglądałoby to tak: if (odleglosci[x] < min_odleglosc && odleglosci[x] > 0) min_odleglosc = odleglosci[x]; Niestety, w tym przypadku robot zupełnie nie wykrywałby przeszkód bezpośrednio naprzeciwko niego, bo otrzymywałby tam pomiary 0 cm (rysunek w załącznikach). Czy ktoś wie, jak naprawić kod/elektronikę? Z góry dziękuję za pomoc. Połączenia czujnik - Arduino: Vcc - 5V Gnd - Gnd trig - D8 echo - D7 //w przod - (R_DIR, 1), (L_DIR, 0). Min. predkosc silnikow to 20 w funkcji Left- i Rightmotor. RightMotor - słabszy //w accelerate dodac zczytywanie obecnej v i porownywac z poprzednia v, plynnie zwalniac //tak naprawde wystarcza dwie zmienne: aktualna_odleglosc i max_odleglosc. Jezeli aktualna_odleglosc > max_odleglosc, staje sie max_odleglosc. Jesli nie, w ogole jej nie potrzebujemy #define L_PWM 5 #define L_DIR 4 #define R_PWM 6 #define R_DIR 9 #define PWM_MAX 165 #define v_min 20 #define trig 8 #define echo 7 #define SERWO_PIN 11 #include <Servo.h> Servo serwo; float odleglosc; float LeftMotorMargin = 5; int max_odleglosc_global = 0; int min_odleglosc_global = 100; int min_odleglosc = 100; int max_odleglosc = 0; int odleglosci [20]; int powtorzenia = 0; int v_previous = 0; int j, x; int do_usuniecia = 0; int poprzedni_kat_serwa; int czestotliwosc_obrotu_serwa = 18; int int_numer_pomiaru; void LeftMotor (int v)//funkcja sterująca silnikiem lewym z jednym argumentem, prędkością. { if (v>0) //jeżeli podana wartość jest dodatnia { v+=LeftMotorMargin; v = map(v,0,100,0,PWM_MAX);//zmieniamy wartość podaną w programie na PWM digitalWrite (L_DIR, 0);//wyznaczamy kierunek - do przodu analogWrite (L_PWM, v);//PWM równy temu, co wyznaczył uzytkownik } else//jeżeli podana liczba jest ujemna { v = abs(v);//zamieniamy liczbę na dodatnią v+=LeftMotorMargin; //v = v - LeftMotorMargin; v = map(v,0,100,0,PWM_MAX);//zmieniamy podaną wartość na PWM digitalWrite (L_DIR, 1);//wyznaczamy kierunek - do tyłu analogWrite (L_PWM, v);//PWM równy temu, co wyznaczył użytkownik } } void RightMotor (int v)//analogiocznie do lewego silnika { if (v>0) { v = map(v,0,100,0,PWM_MAX); digitalWrite (R_DIR, 1); analogWrite (R_PWM, v); } else { v = abs(v); v = map(v,0,100,0,PWM_MAX); digitalWrite (R_DIR, 0); analogWrite (R_PWM, v); } } void stopMotors()//zatrzymanie silników { analogWrite(L_PWM, 0); analogWrite(R_PWM,0); } void accelerate (int v)//funkcja na płynne przyspieszanie i zwalnianie { if (abs(v)<20)//jeżeli podana liczba jest mniejsza niż 20 { v=20; //prędkość równa się 20 (unikamy prędkości zbyt małych, by ruszyć). } Serial.println (v); if (v>v_previous)//jeżeli przyspieszamy { for (int i = v_previous; i<v; i++)//zacznij od poprzedniej wartości, zwiększaj do wyznaczonej do wyznaczonej { RightMotor(i);//do przodu LeftMotor(i); delay(50); } } if (v<v_previous)//jeżeli zwalniamy { for (int i=v_previous; i>v; i--)//zacznij od wartości poprzedniej, zmniejszaj do wyznaczonej { RightMotor(i); LeftMotor(i); delay(50); } } v_previous = v;//zapisz obecną wartość jako wyznaczoną } float pomiar_odleglosci () { float odleglosc, czas; digitalWrite (trig, LOW); delayMicroseconds (2); digitalWrite (trig, HIGH); delayMicroseconds (10); digitalWrite (trig, LOW); czas = pulseIn (echo, HIGH); odleglosc = czas / 58; return odleglosc; } void serwo_right () { min_odleglosc = 100; for (int i = poprzedni_kat_serwa; i>0; i--) { serwo.write(i); delay(10); //czujnik wychyla sie w prawo, resetujemy min_odleglosc } poprzedni_kat_serwa = serwo.read(); } void serwo_left () { odleglosci[x] = pomiar_odleglosci (); Serial.println ("odleglosc prawa"); Serial.println (x); Serial.println (odleglosci[x]); x++;//wykonujemy pierwszy pomiar (w innym wypadku miałby on miejsce dopiero po wychyleniu serwa o czestotliwosc_obrotu_serwa, czyli 18 stopni) for (int i = poprzedni_kat_serwa; i<=180; i++) { //posuwamy sie az do skrajnie lewego wychylenia (zaczynamy ze skrajnie prawego) if (x>180/czestotliwosc_obrotu_serwa) x=0; //jezeli wykonalismy pelen cykl pomiarow resetujemy ich licznik if (j>=czestotliwosc_obrotu_serwa)//kiedy czujnik skrecil o kat podany jako czestotliwosc_pomiaru (kiedy trzeba wykonac pomiar) { j=0; //resestujemy licznik umozliwiajacy wykonanie pomiaru co czestotliwosc_pomiaru odleglosci[x] = pomiar_odleglosci();//wykonujemy pomiar if (odleglosci[x]>max_odleglosc)//jezeli aktualna odleglosc jest wieksza od zapisanej jako najwieksza odleglosc, staje sie nowa najwieksza odlegloscia max_odleglosc = odleglosci[x]; if (odleglosci[x]<min_odleglosc)//jezeli aktualna odleglosc jest mniejsza od zapisanej jako najmniejsza odleglosc min_odleglosc = odleglosci[x]; if (i < 90)//kiedy czujnik jest wychylony w lewo { Serial.println ("odleglosc prawa");//wypisujemy aktualna odleglosc Serial.println (x); Serial.println (odleglosci[x]); }else //kiedy czujnik jest wychylony w prawo { Serial.println ("odleglosc lewa"); //wypisujemy aktualna odleglosc Serial.println (x); Serial.println (odleglosci[x]); } x++; //zwiekszamy licznik pomiarow } //Serial.print ("Kat serwa = "); opcjonalnie mozna odkomentowac, pozwala zobaczyc kat serwa //Serial.println (serwo.read()); serwo.write(i);//przesuwamy serwo j++;//zmieniamy licznik przesuniec, dzieki temu mozemy robic pomiary kiedy osiognie wartosc = czestotliwosc_pomiaru delay(10); } poprzedni_kat_serwa = serwo.read();//zapisujemy obecny kat obrotu jako poprzedni_kat_serwo, co pomaga w wykonywaniu innych obrotow } void serwo_mid ()//kierujemy serwo do pozycji prostopadlej do tylnej do osi { if (poprzedni_kat_serwa > 90)//jezeli serwo jest zwrocone w lewo { for (int i = poprzedni_kat_serwa; i>90; i--)//zmniejszamy, czyli idziemy do prawej { serwo.write(i); } }else //kiedy serwo jest zwrocone w lewo { for (int i = poprzedni_kat_serwa; i<90; i++)//zwiekszamy, czyli idziemy do lewej { serwo.write(i); } } poprzedni_kat_serwa = serwo.read();//zapisujemy obecny kat obrotu jako poprzedni_kat_serwo, co pomaga w wykonywaniu innych obrotow } void zadany_obrot (int kat)//obrot serwa do zadanego katu { if (poprzedni_kat_serwa > kat)//jezeli zadany kat jest na prawo od obecnego { for (int i = poprzedni_kat_serwa; i>kat; i--)//skrecamy serwo w prawo { serwo.write(i); } }else //jezeli zadany kat jest na lewo od obecnego { for (int i = poprzedni_kat_serwa; i<kat; i++)//skrecamy serwo w lewo { serwo.write(i); } } poprzedni_kat_serwa = serwo.read();//zapisujemy obecny kat obrotu jako poprzedni_kat_serwo, co pomaga w wykonywaniu innych obrotow } int numer_pomiaru ()//zczytujemy tablice odleglosci[] (wyniki pomiarow) i szukamy tego, ktory jest najmniejszy { for (int i = 0; i <180/czestotliwosc_obrotu_serwa; i++)//przeszukujemy wszystkie pomiary { if (odleglosci[i] == min_odleglosc)//jezeli odleglosc o numerze 'i' jest najmniejsza { return i;//zwracamy numer pomiaru } } } float pomiar_odleglosci_serwo()//uzywamy trzech wyzej opisanych funkcji do zrobienia pomiaru odleglosci { serwo_right(); serwo_left(); serwo_mid(); return min_odleglosc; } void setup() { //definicja pinow, start komunikacji pinMode(L_DIR, OUTPUT); pinMode(R_DIR, OUTPUT); pinMode(L_PWM, OUTPUT); pinMode(R_PWM, OUTPUT); pinMode (trig, OUTPUT); pinMode (echo, INPUT); serwo.attach(SERWO_PIN); Serial.begin (9600); serwo_mid(); } void loop() { //wypisywanie wynikow pomiarow w porcie szeregowym Serial.println ("Pomiar odleglosci"); min_odleglosc_global = pomiar_odleglosci_serwo();//sprawdzamy odleglosci od przeszkod wokol robota delay(1000); int_numer_pomiaru = numer_pomiaru();//znajdujemy najmniejszy pomiar Serial.println ("numer pomiaru"); Serial.println (int_numer_pomiaru); Serial.println ("min_odleglosc"); Serial.println (min_odleglosc_global); delay(1000); Serial.println ("zadany obrot"); zadany_obrot(int_numer_pomiaru*czestotliwosc_obrotu_serwa);//obracamy serwo do kata, na ktorym byl najmniejszy pomiar Serial.println ("kat"); Serial.println (int_numer_pomiaru*czestotliwosc_obrotu_serwa); } film z dzialania robota.zip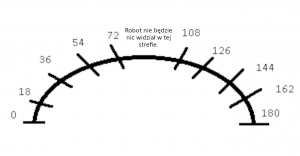


.thumb.png.36d86fa35623fe419f817ecb9fd4e65f.png)
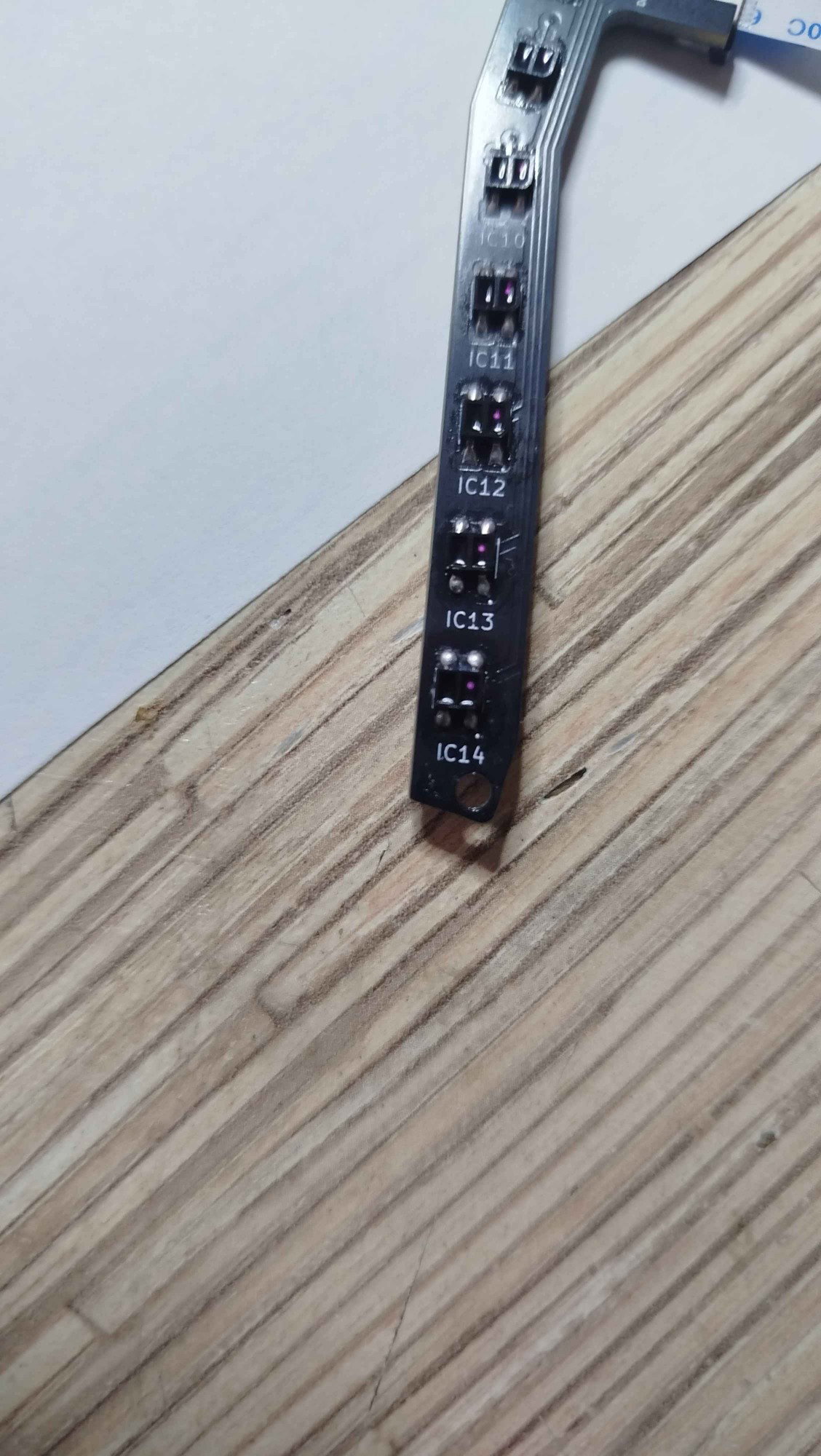

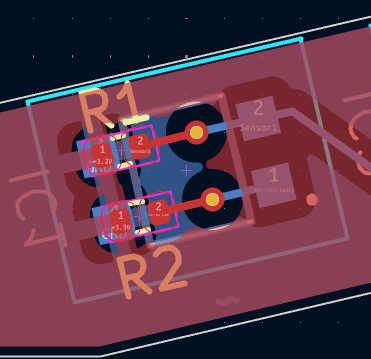
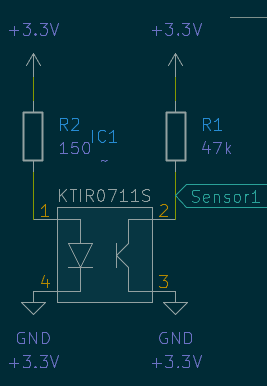






















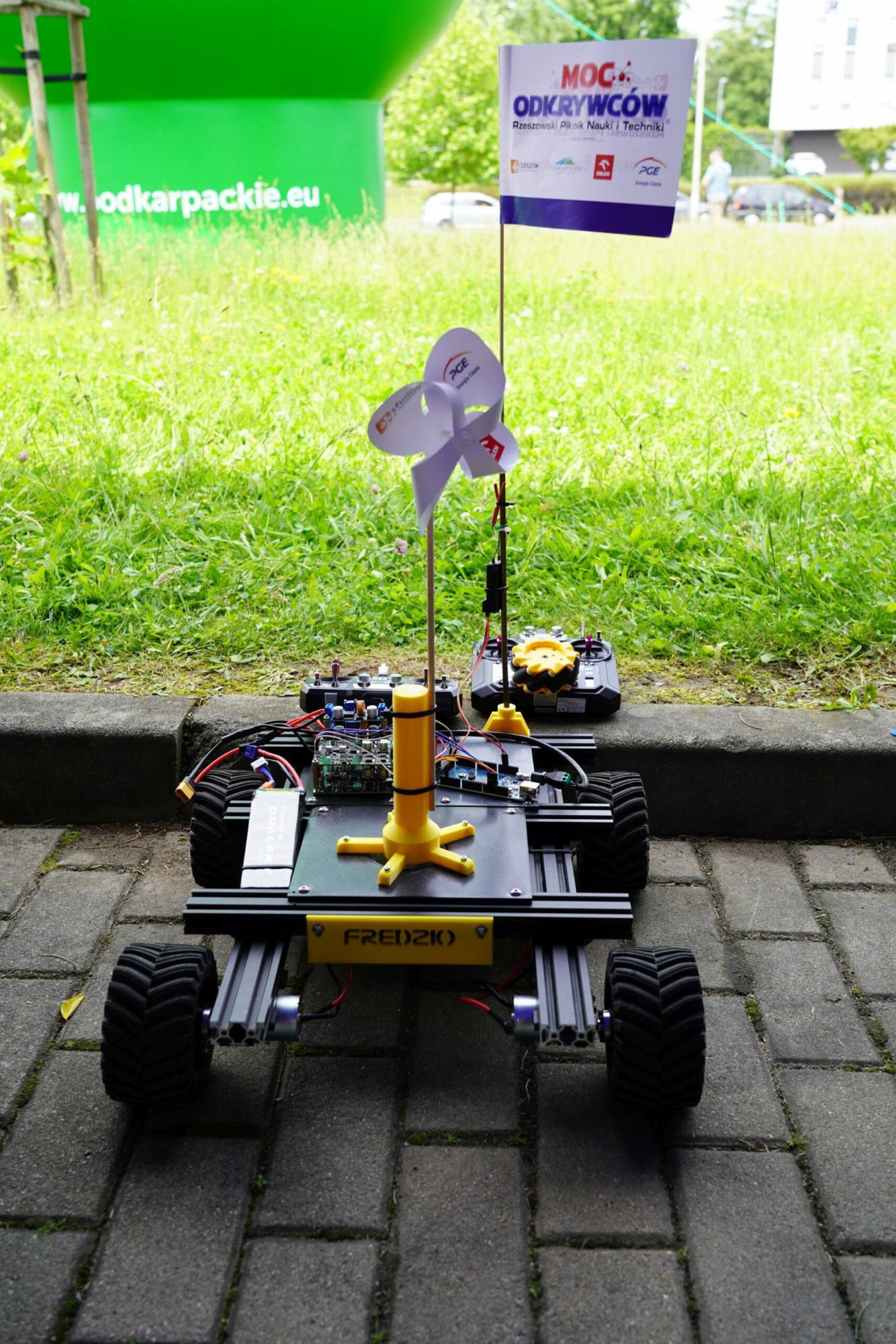
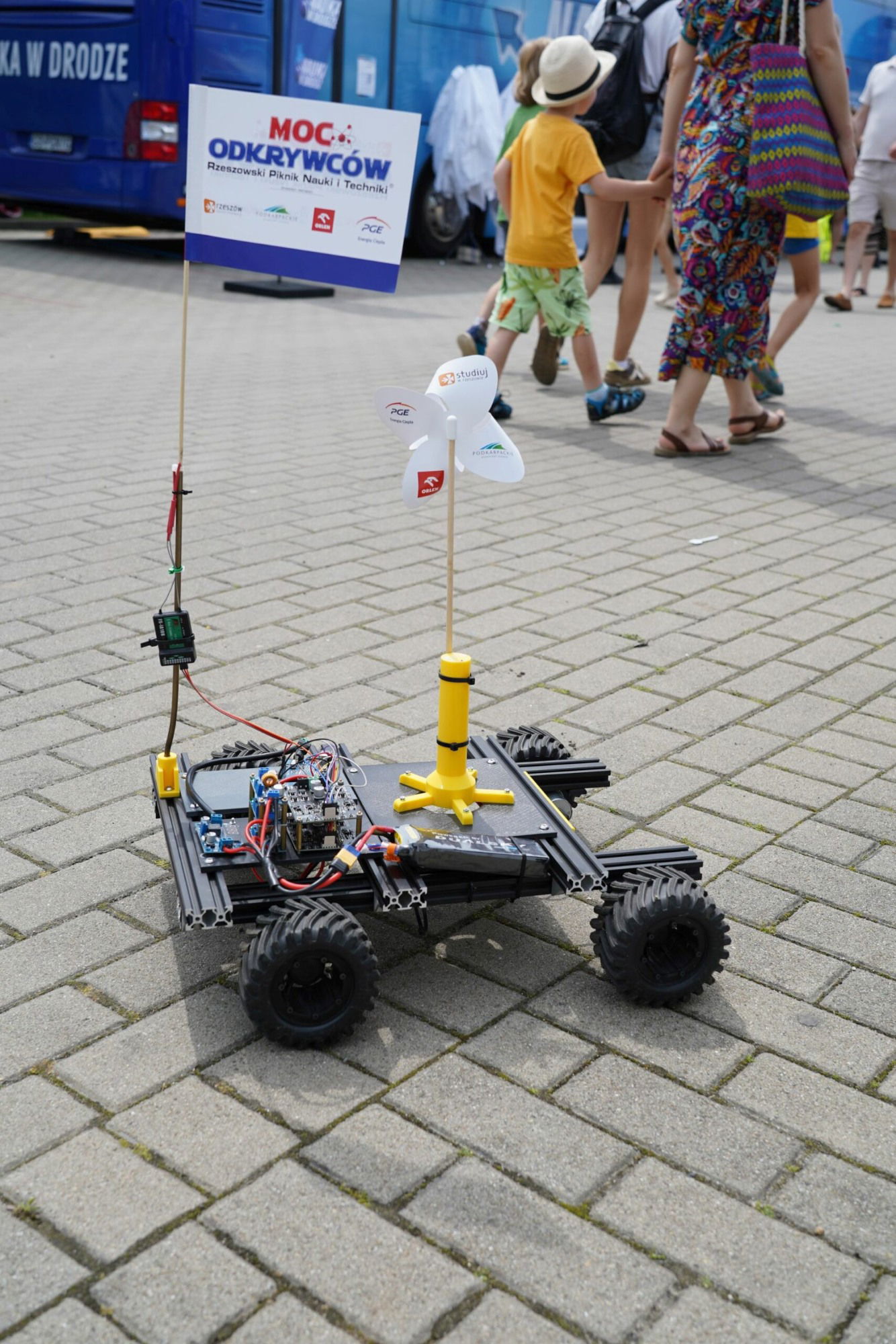

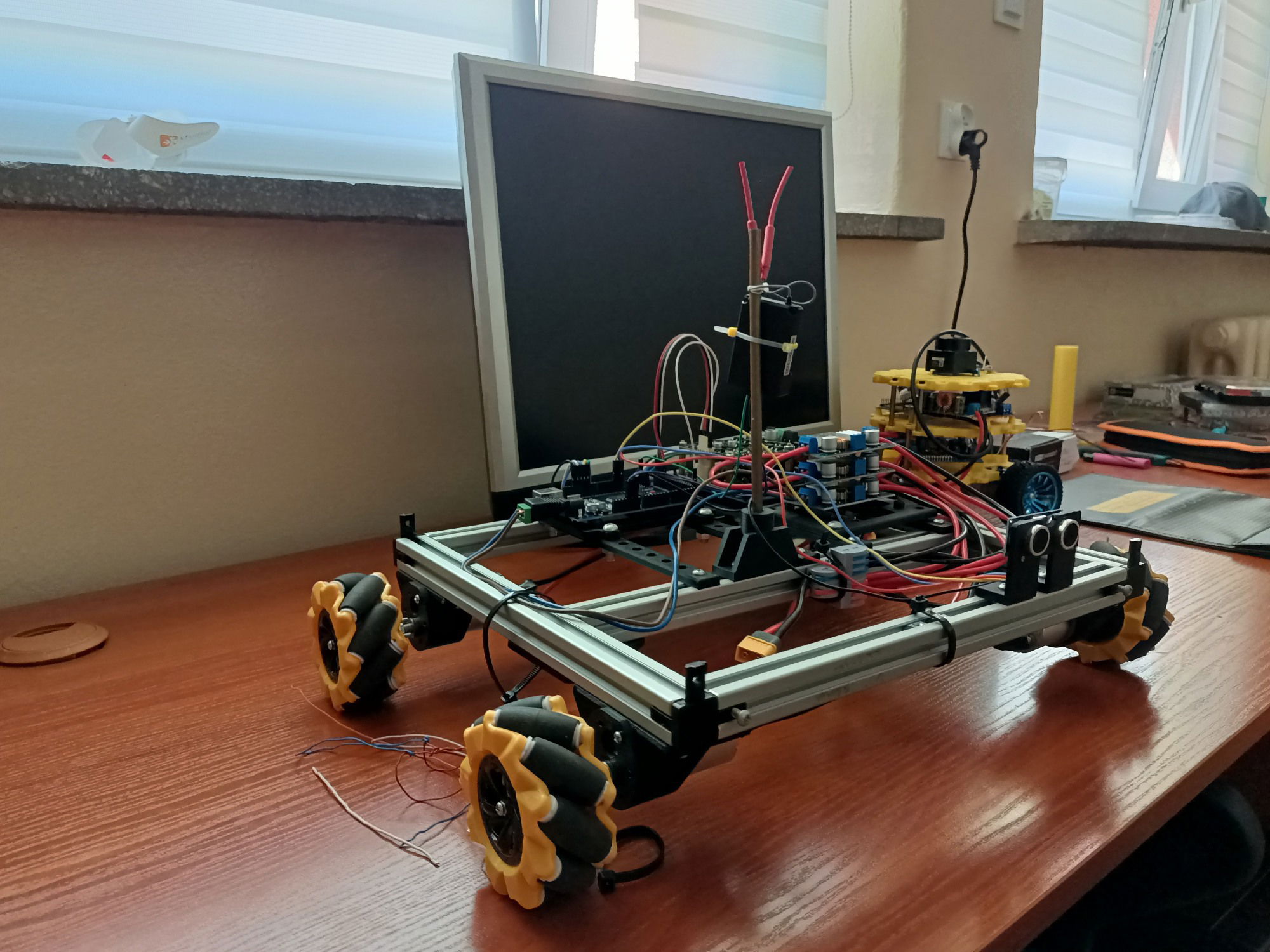
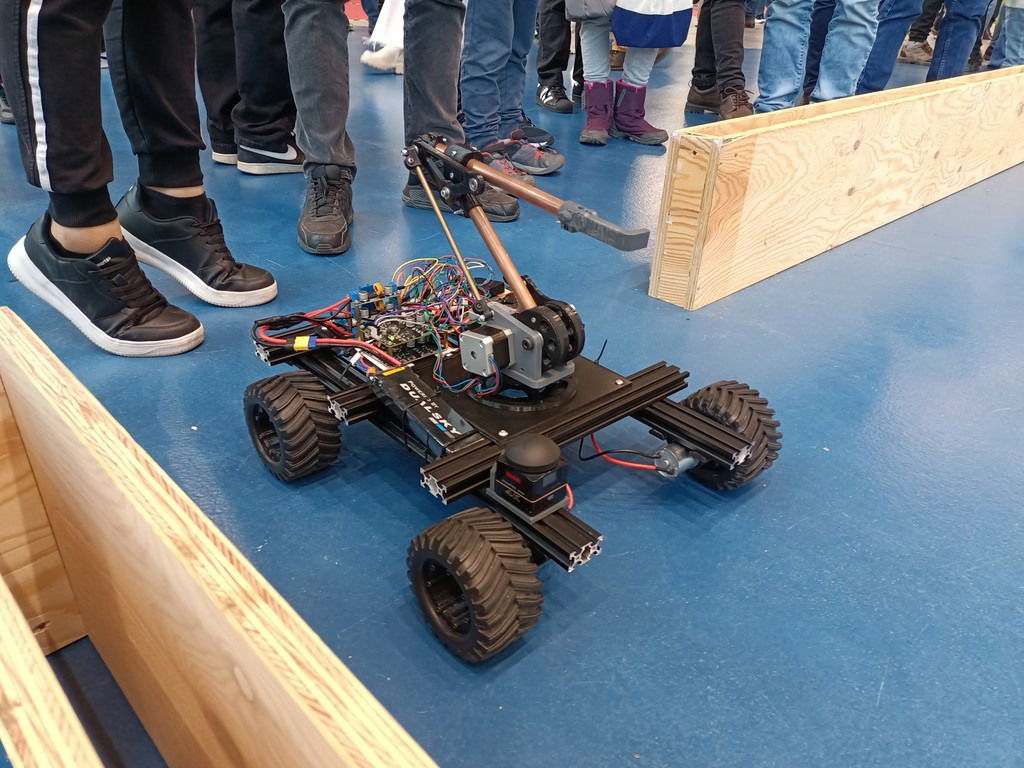


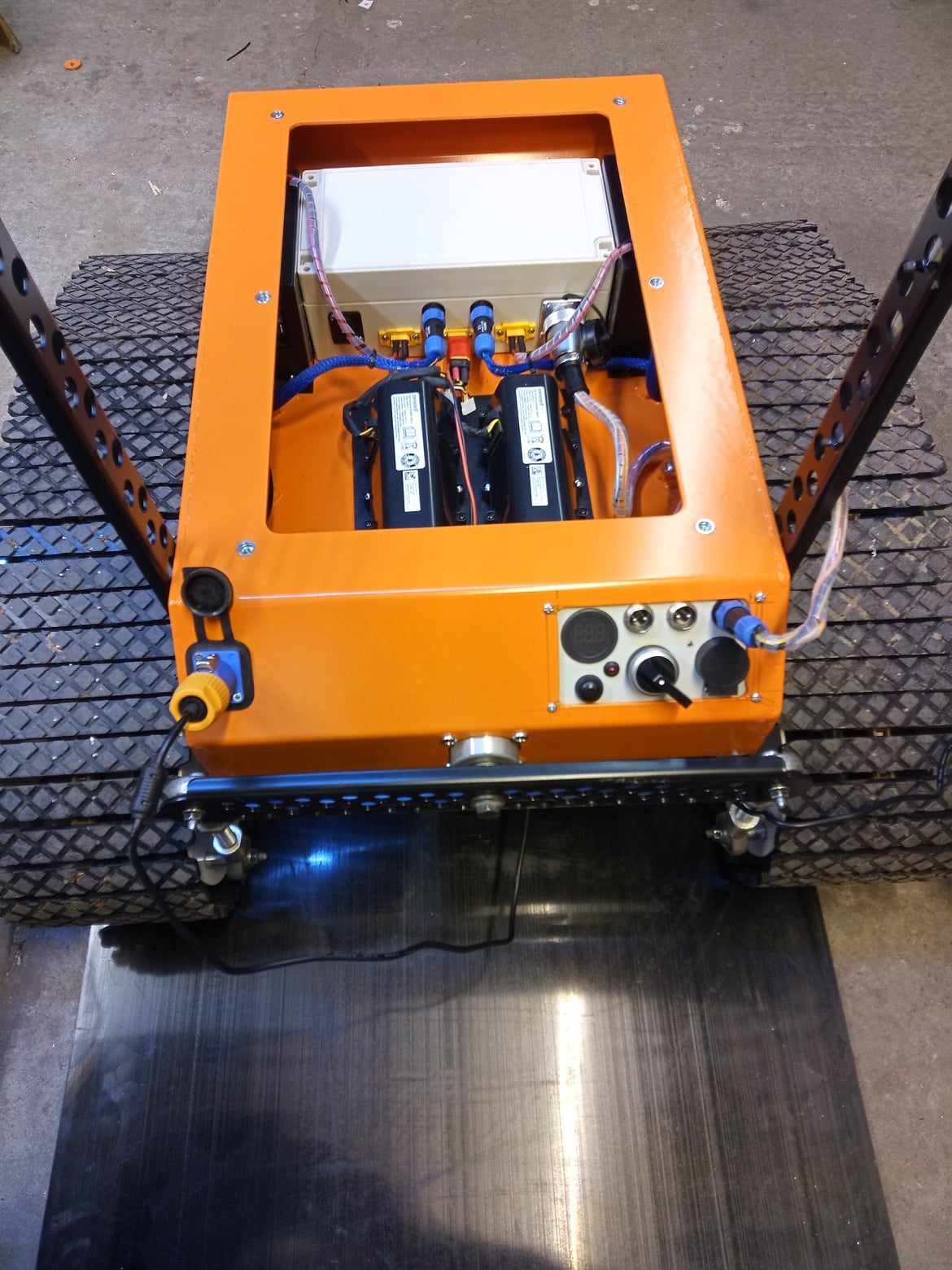
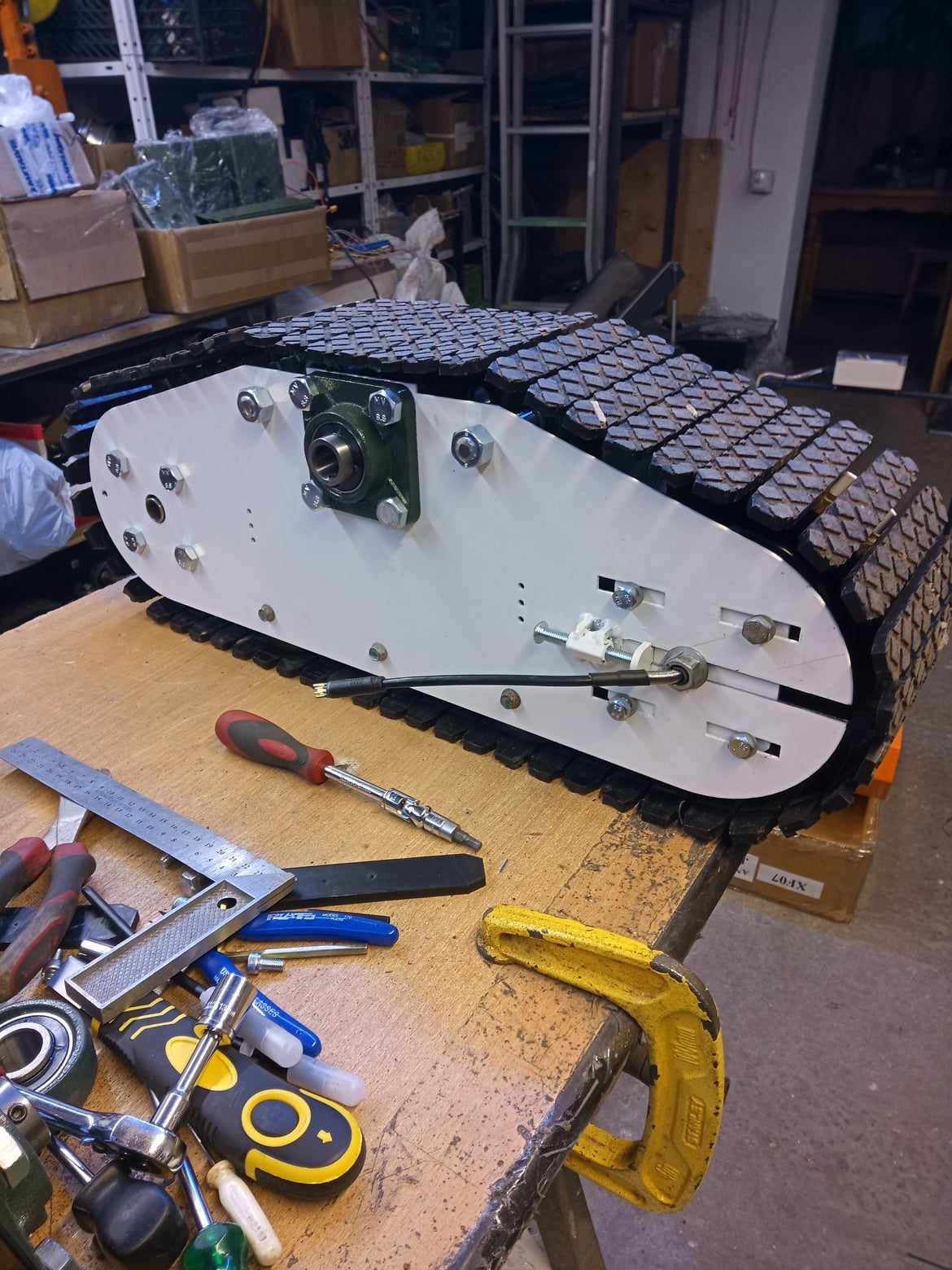
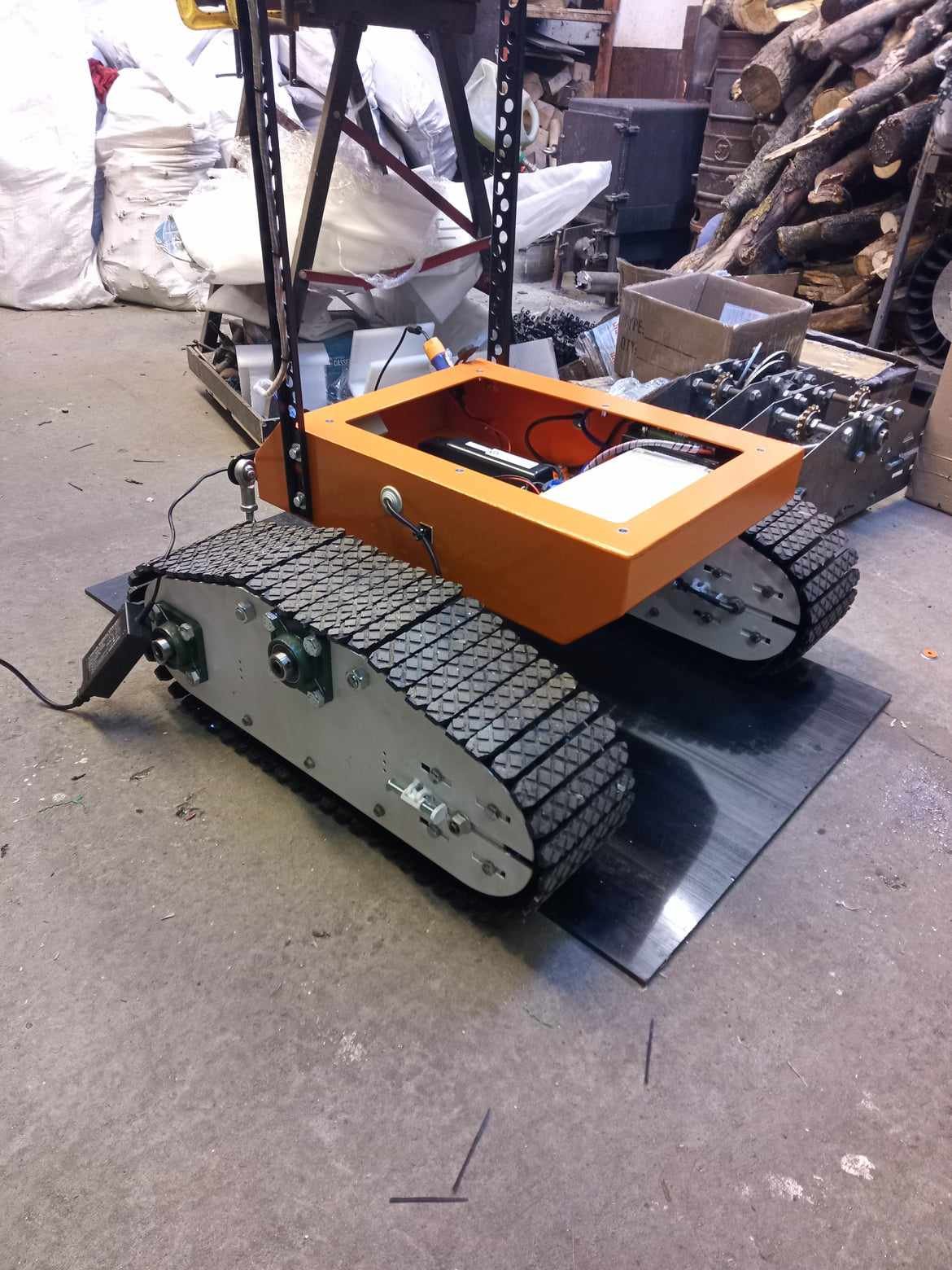






































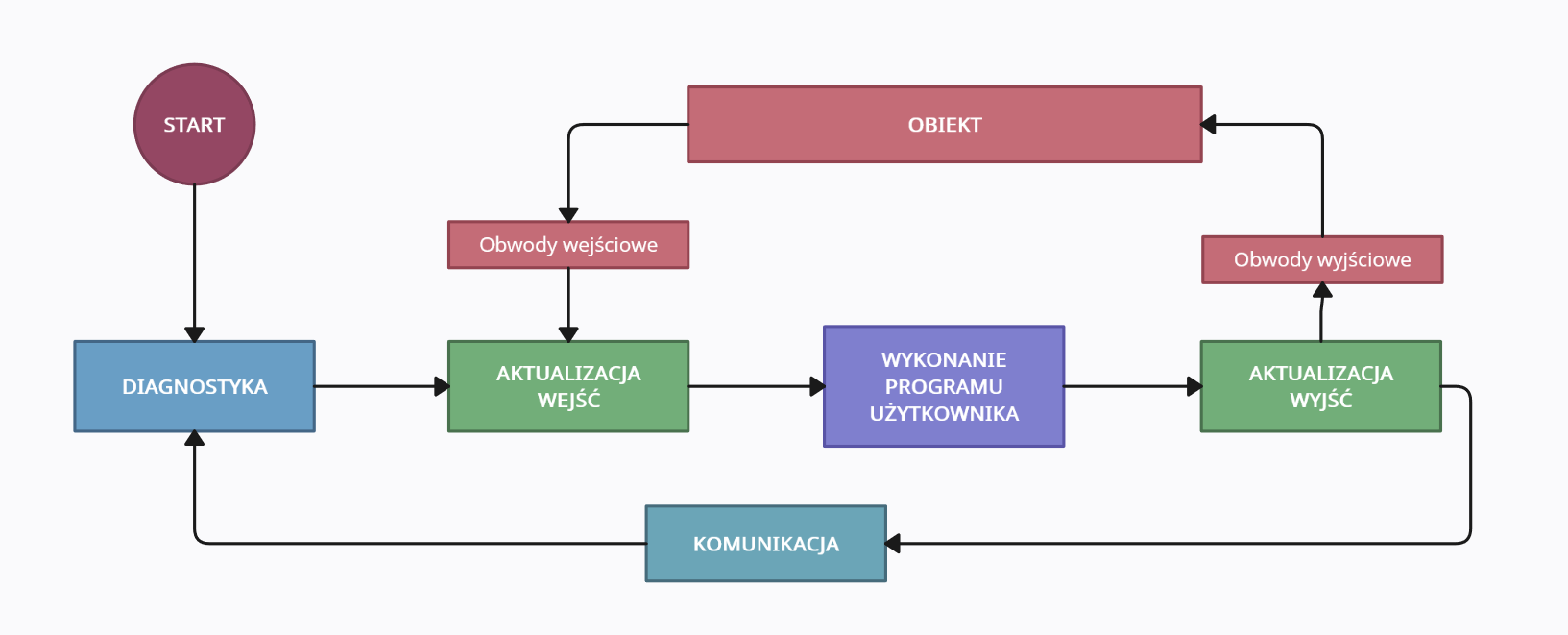


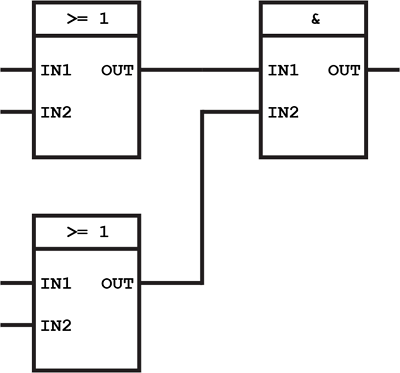
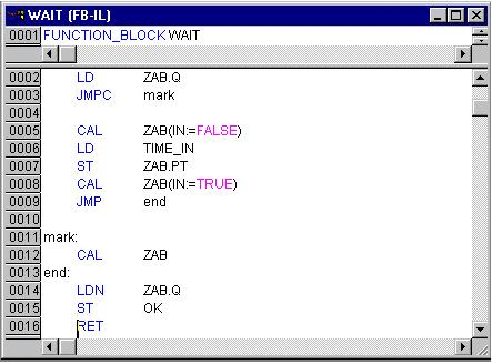
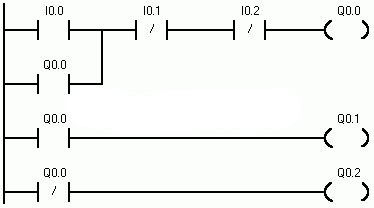
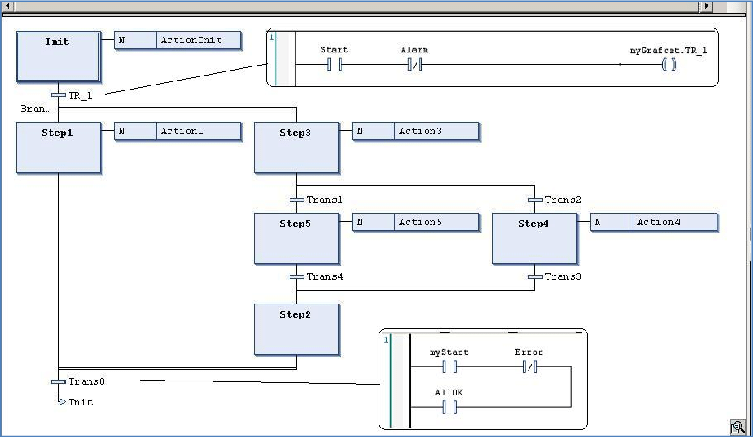
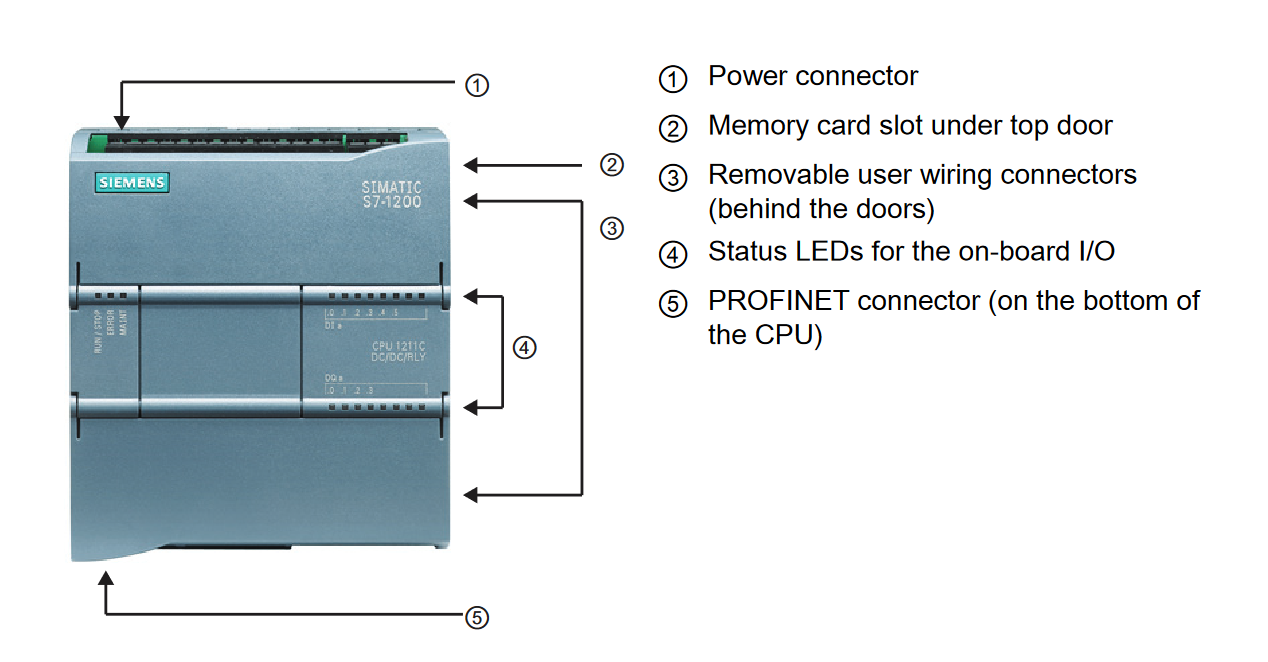

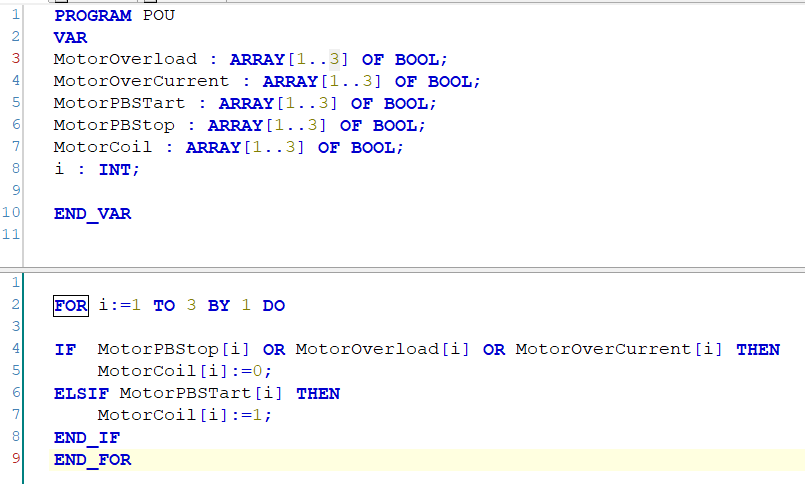

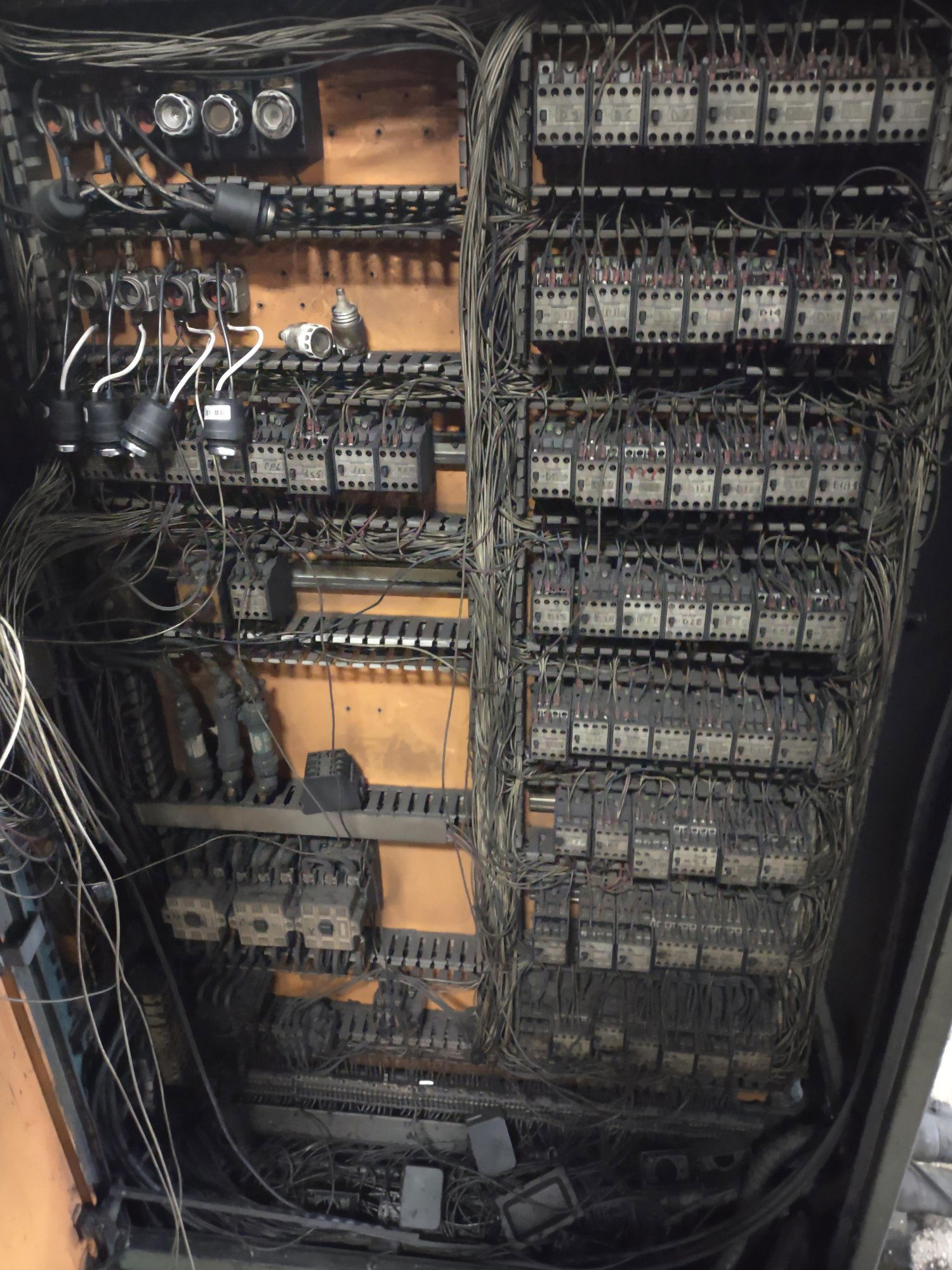



.gif.a32f88659a4becb301069b028c6ac40e.gif)