Przeszukaj forum
Pokazywanie wyników dla tagów 'CAD'.
Znaleziono 5 wyników
-
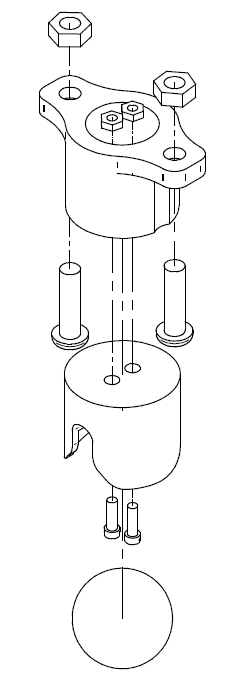
Mam obudowę składającą się z trzech podstawowych elementów Potrzebuję aby część która jest na spodzie była narzędziem wycinającą tę opaskę w środku. Problem polega na tym że nie umiem na etapie edycji wycentrować obiektów tak aby były pasowne jak na powyższej grafice. Efektem tego jest to że mam pewne niezerowe przesunięcie. Czy jest jakieś polecenie, zbiór poleceń które pozwoli na automatyczne wyrównanie wszystkich komponentów? tu widać że jest nie wielkie przesunięcie, do tej pory próbowałem to przesuwać narzędziem move ale jakoś ciężko trafić z wszystkimi osiami.

-
Cześć, używał może ktoś CAD'a mechanicznego "BeckerCAD 12 3D Pro". Proszę nie pomyśleć, że to zakamuflowana forma krypto-reklamy, po prostu zainteresowała mnie ta wersja oprogramowania. Tutaj link do oferty firmy Softmaker dla tego CAD'a: https://www.softmaker.com/pl/beckercad A tutaj link do strony producenta: https://www.mut.de/beckercad.html Zainteresowały mnie opcje symulacji 3D, eksport do formatu AutoCAD'a oraz generowanie STL z modelu, a także duża liczba gotowych modeli do pobrania w sieci. Chciałbym używać tego CAD'a do projektowania prostych wydruków dla drukarki 3D (przeważnie jakieś obudowy do układów elektronicznych). Ma ktoś może doświadczenie z tym CAD'em i mógłby się podzielić opiniami na jego temat. Z góry dziękuję i pozdrawiam.
-
Witajcie, kolejne pytanie. Czy tinkercad to oprogramowanie CAD?
-
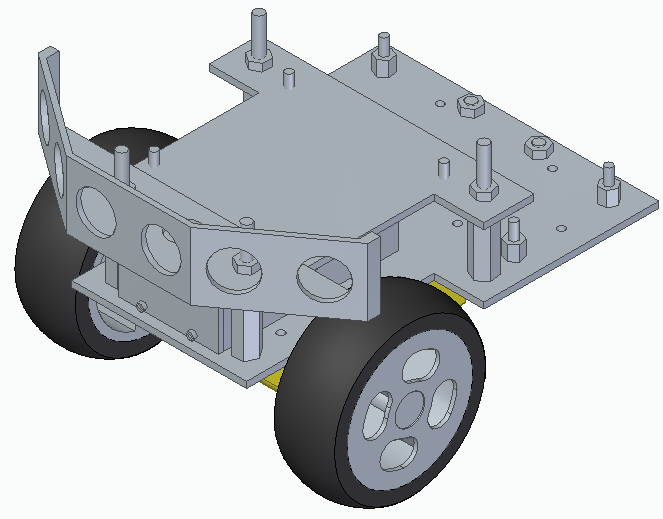
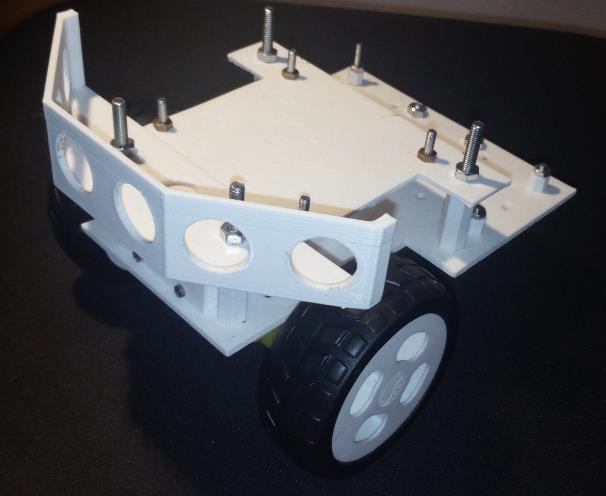
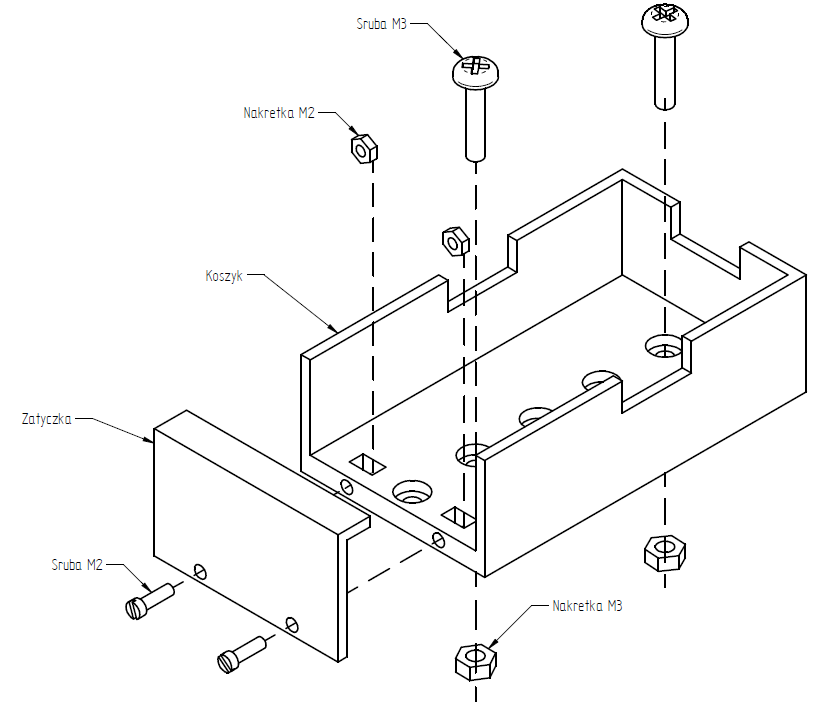
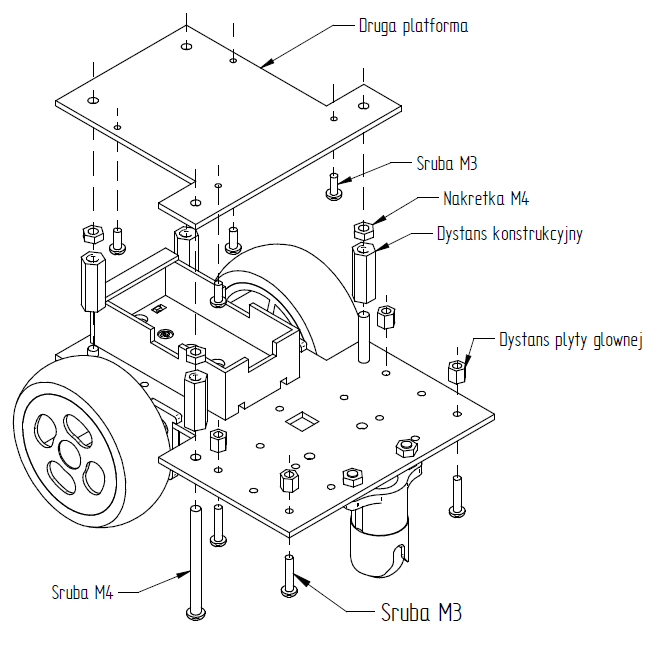
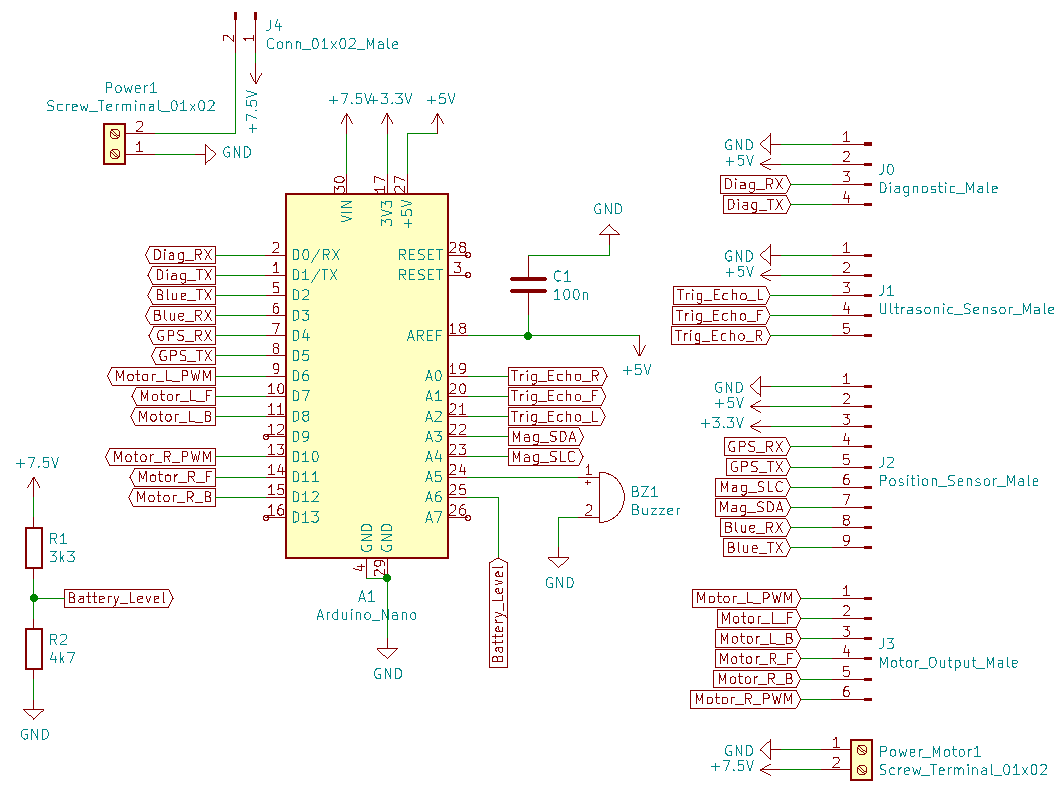
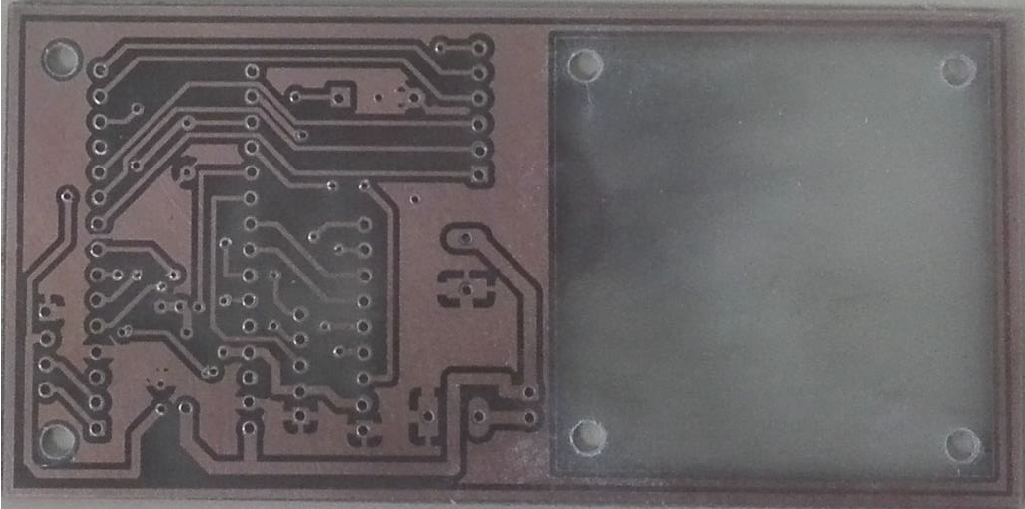
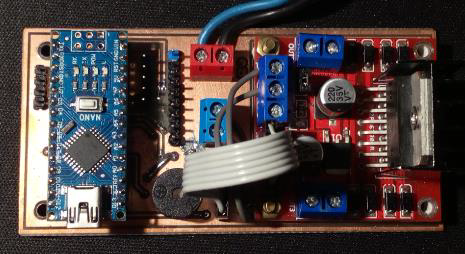
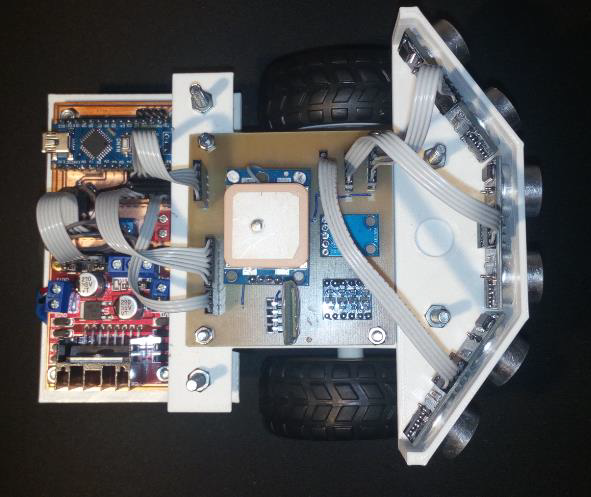
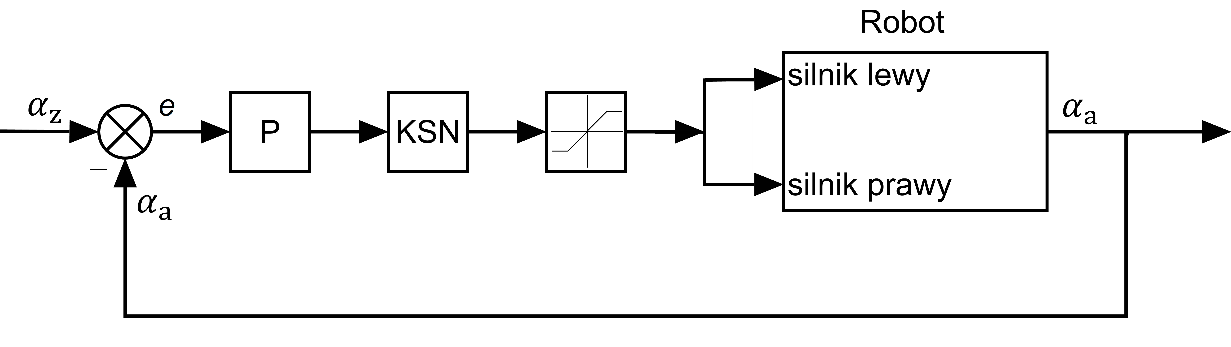
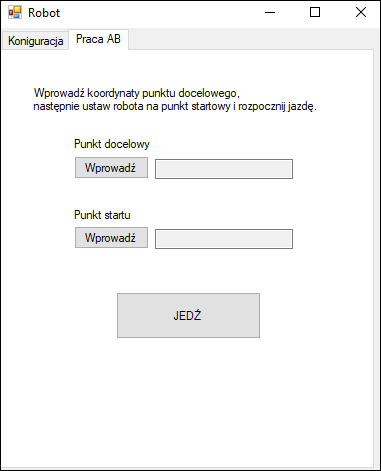
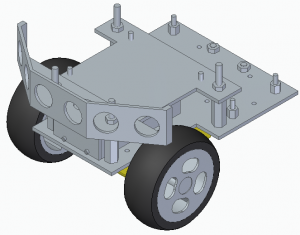
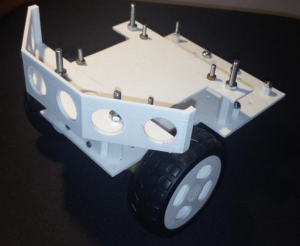
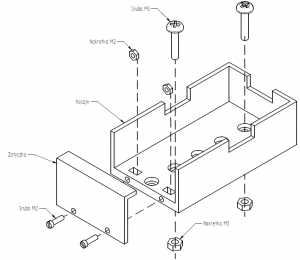
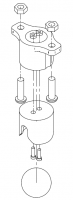
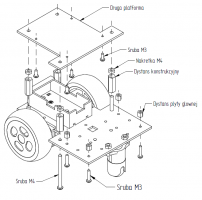
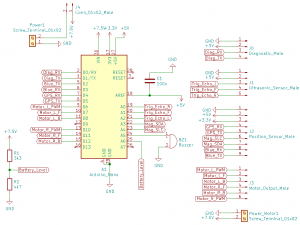
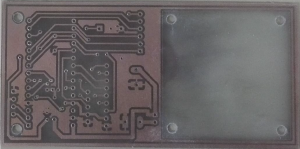
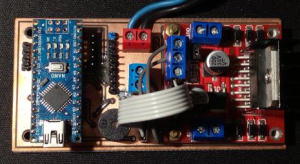
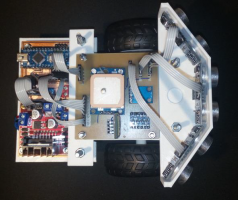
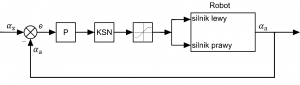
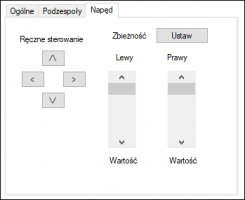
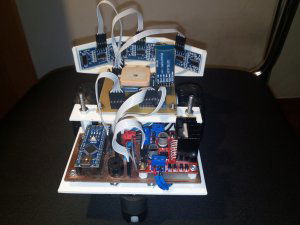
Autonomiczny robot mobilny z nawigacją GSP W życiu każdego studenta przychodzi monet, kiedy musi się spiąć i zrobić pracę inżynierską. Jako, że większość proponowanych tematów przez uczelnię nie wpadło w obszar moich zainteresowań, a już od jakiegoś czasu chciałem „pobawić się” w budowę robota z GPS to właśnie taki temat zaproponowałem promotorowi i bez problemów został zaakceptowany (kierunek – AiR). Potem jak się okazało nie był to do końca dobry pomysł z uwagi na problemu w testowaniu GPS – testy przypadły głównie na styczeń – a więc w tym roku deszcze itp. a nawigację trzeba jednak testować na dworze. To tyle tytułem wstępu a teraz do bardziej praktycznych zagadnień. Robot z założenie miał być 2 kołowy + jedno koło wleczone, posiadać moduł bluetooth do wstępnej kalibracji i wpisywaniu współrzędnych, sterowany za pomocą Arduino Nano (w tym przypadku klon), a jego zmysłami poznawania świata miał być: moduł GPS Neo-6m, magnetometr oraz 3 czujniki ultradźwiekowe z przodu do wykrywania przeszkód. Przeszukałem pełno gotowych platform mobilnych ale żadna mi do końca nie pasowała, a że od niedawna byłem właścicielem drukarki 3D to postanowiłem zaprojektować własną i wydrukować z PLA. Projekt owej platformy zrobiłem w środowisku CAD w programie Solid Edge i wyglądał tak jak poniżej. Składa się z 2 platform oraz miejsca na czujniki ultradźwiękowe: dolna na arduino, sterownik i akumulator, a górna na pozostałe podzespoły. Jak widać pokusiłem się o zamodelowanie również felg do już gotowych kół – okazało się że mają efekt „ósemkowania” co uniemożliwiało prostą jazdę. Koło wleczone zastąpiłem jednak Ball Caster'em, ponieważ te które użyłem miało straszne luzy i również powodowało samoczynną jazdę po łuku. A tak prezentuje się już wydrukowana i złożona platforma: Jako że wszystko było zamodelowane w CAD’zie to mogłem porobić rysunki złożeniowe rodem jak z sklepów meblowych (może projektowanie mechaniczne to dobry pomysł na artykuł ) Kolejnym krokiem było zrobienie elektroniki. Aby wyglądało to w miarę estetyczniej to pokusiłem się o zrobienie płytki PCB – projekt w KiCad'zie a potem termotransferem na laminat (tam gdzie Arduino to płytka dwustronna, a tam gdzie moduły jedno) Jeszcze tylko zasilanie – Li-Pol 2s firmy Redox (pomocny w ogarnięciu tego tematu był artykuł na Forbocie – wielkie dzięki za kompendium wiedzy w pigułce) i możemy zaczynać programować – a to dla mnie było największym wyzwaniem. Wrzuciłbym kod ale to jest 700 linijek napisanych raczej łopatologicznie więc tylko ja się w nim odnajduję Jak byście mieli jakieś pytania odnośnie działania jakiejś części to podrzucę i postaram się wyjaśnić. Jako, że byłem na AiR no to fajnie by było wrzucić jakiś nawet prosty regulator – zdecydowałem się na Proporcjonalny a układ regulacji wygląda następująco: (KSN – kompensacja strefy nieczułości) Działał on dosyć dobrze, im robot "był dalej" od zadanego kontu tym szybciej obracał się a im bliżej tym zwalniał, zaś przeregulowanie było znikome. Gotowy robot prezentuje się tak: Niestety wszystko nie było takie piękne i proste, a to niektóre napotkane problemy Magnetometr praktycznie nie działał. Wskazywał azymut w przedziale może z 0-15o. Powodem było pole magnetyczne wytwarzane przez magnesy silników. Google jednak nie znały odpowiedzi co zrobić z tym faktem więc testowałem po kolei różne warianty i tak o to idealnym rozwiązaniem okazało się umieszczenie silników w stalowe rurki. Z powody złych warunków na dworze testowanie robota nie było zawsze możliwe. Arduino też nie wyrabiał jak dostawał tyle danych (GPS okazał się bardzo obciążający – w momencie kiedy dostawał pakiet danych to Ardu zaczęło wariować). GPS i bluetooth nie mogły działać w tym samym momencie więc nie miałem możliwości zdalnie dowiedzenia się co robot w danej chwili „miał na myśli”. Generalnie to wszystko działało ale osobno: jak testowałem unikanie przeszkód i ustawianie się na dany kąt to była gitara. Dołożyłem do tego GPS to raz działało a raz nie – jak wspomniałem po dostaniu pakietu danych zaczynał wariować przez chwilę. W planach mam zamianę Ardu na STM32 i spróbowanie ponownie ruszyć temat. Dodatkowo napisałem prostą aplikację w C#, która komunikowała się z robotem przez bluetooth i można było łatwiej testować podzespoły i wprowadzać współrzędne. Praca została obroniona na 5 więc było warto poświęcić nad tym dużo czasu. Zapraszam do komentowania





- 9 odpowiedzi
-
- 12
-

-
- GPS
- Magnetometr
- (i 2 więcej)
-
Cześć, jakiś czas temu w firmie w której pracuję wspomniałem, że przydałby się "MATLAB"+"Simulink" do prototypowania i symulacji nowych projektów. Nie liczyłem, że będzie jakiś odzew. Ku mojemu zdumieniu w zeszłym tygodniu dostałem płytkę DVD z komercyjną wersją programu "Polymath" (wersja 2.20 pod WindowsXP). Oto link do strony producenta tego oprogramowania: https://www.polymath-software.com/ Zainstalowałem tą wersję na jakimś starym laptopie z Windows XP i przyjrzałem się przykładowym projektom. Z tego co zobaczyłem ten program ma importy/eksporty do Matlab'a i dość rozbudowane moduły do wizualizacji danych. Czy ktoś z Was używał może tego programu i mógłby się podzielić doświadczeniami? Pozdrawiam