Przeszukaj forum
Pokazywanie wyników dla tagów 'Magnetometr'.
Znaleziono 4 wyniki
-
Dzień dobry, Zwracam się z prośbą o pomoc w celu dobrania czujnika analogowego pomiaru natężenia pola magnetycznego. Moja aplikacja składa się ze zwykłej taśmy samoprzylepnej magnetycznej, cechuje się ona udźwigiem do 60g/cm2. Ostatnio zakupiłem moduł z czujnikiem halla KY-035, lecz pole magnetyczne jest zbyt małe dla niego i na wyjściu odczytuję różnicę max 0.2V przy całkowitym przyłożeniu do taśmy. Czy mógłbym prosić o dobór czujnika, który lepiej pasowałby do mojej aplikacji? Aplikacja robota jeżdżącego po linii magnetycznej. Robot dosyć sporych rozmiarów 3 kołowy. Z góry dziękuję za każdą pomoc.
-
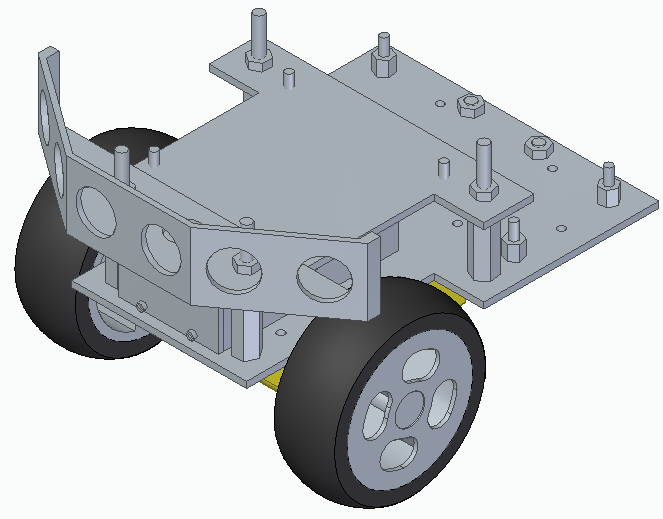
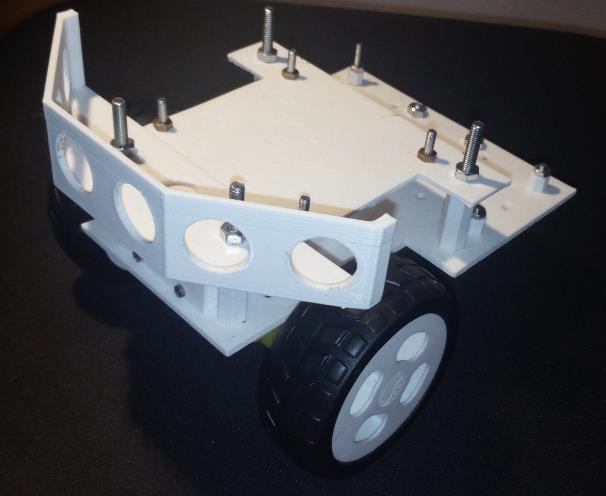
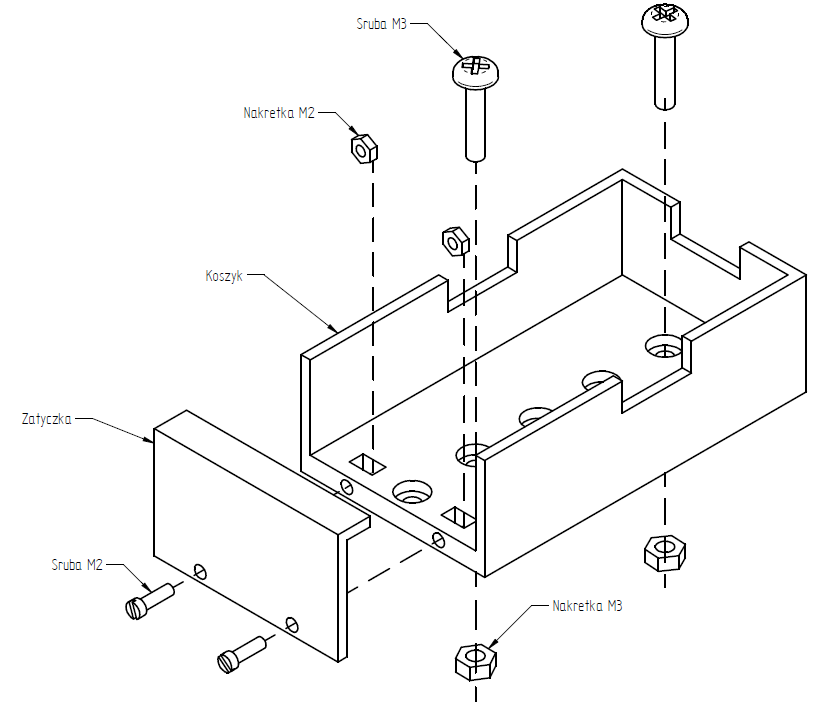
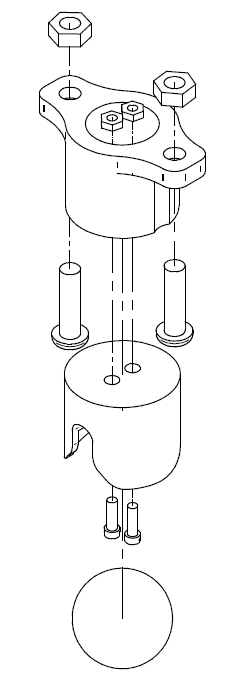
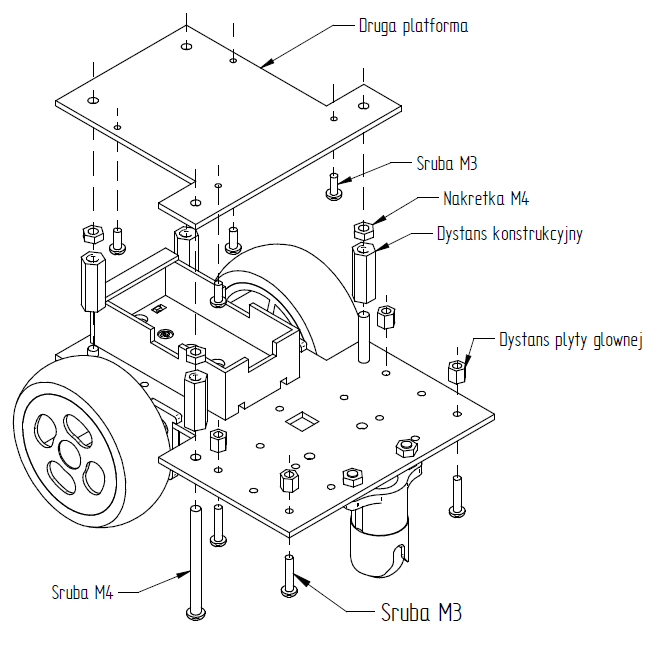
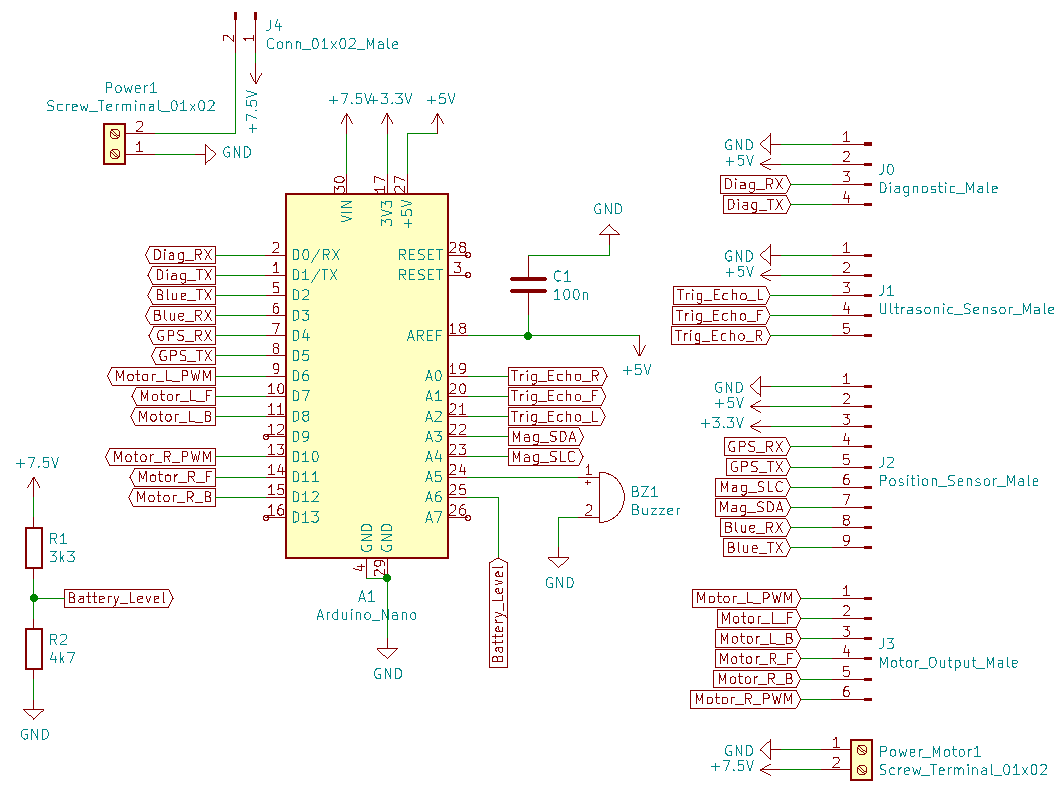
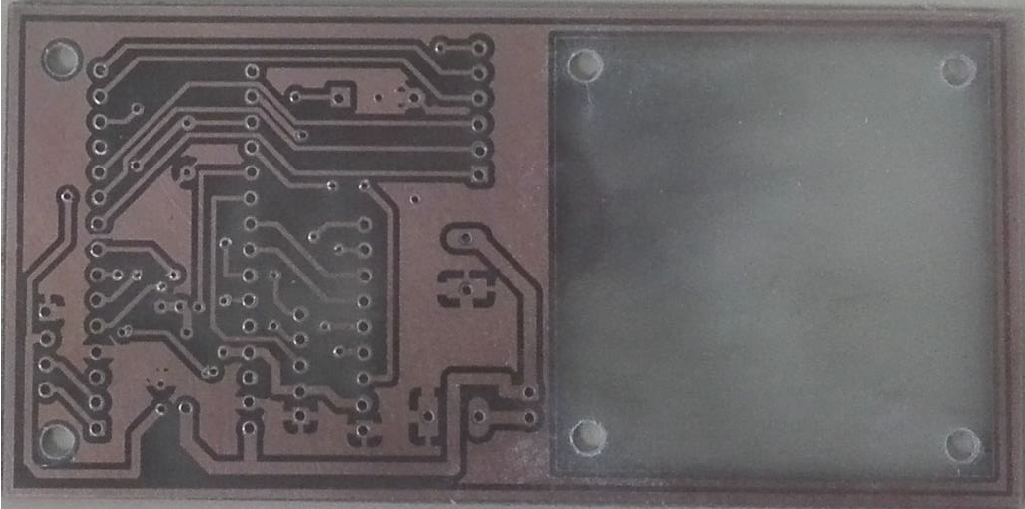
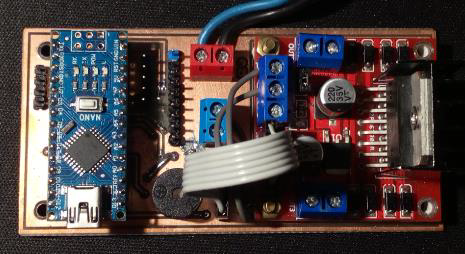
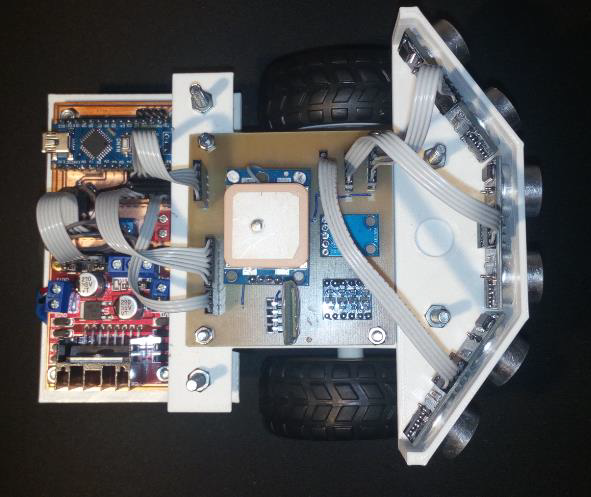
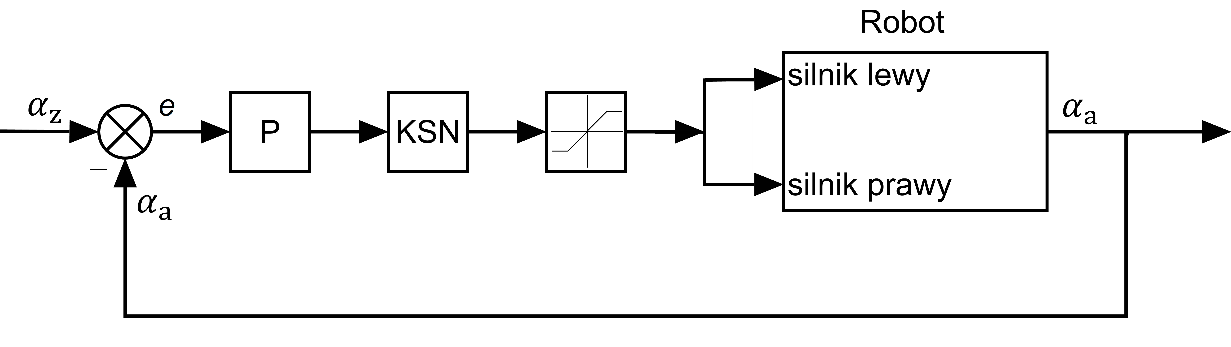
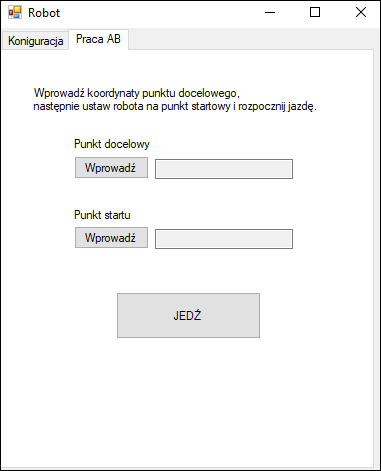
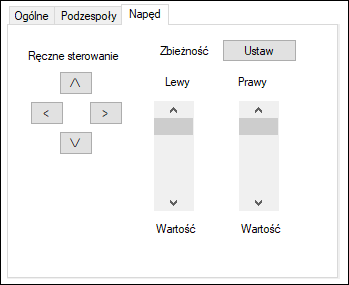
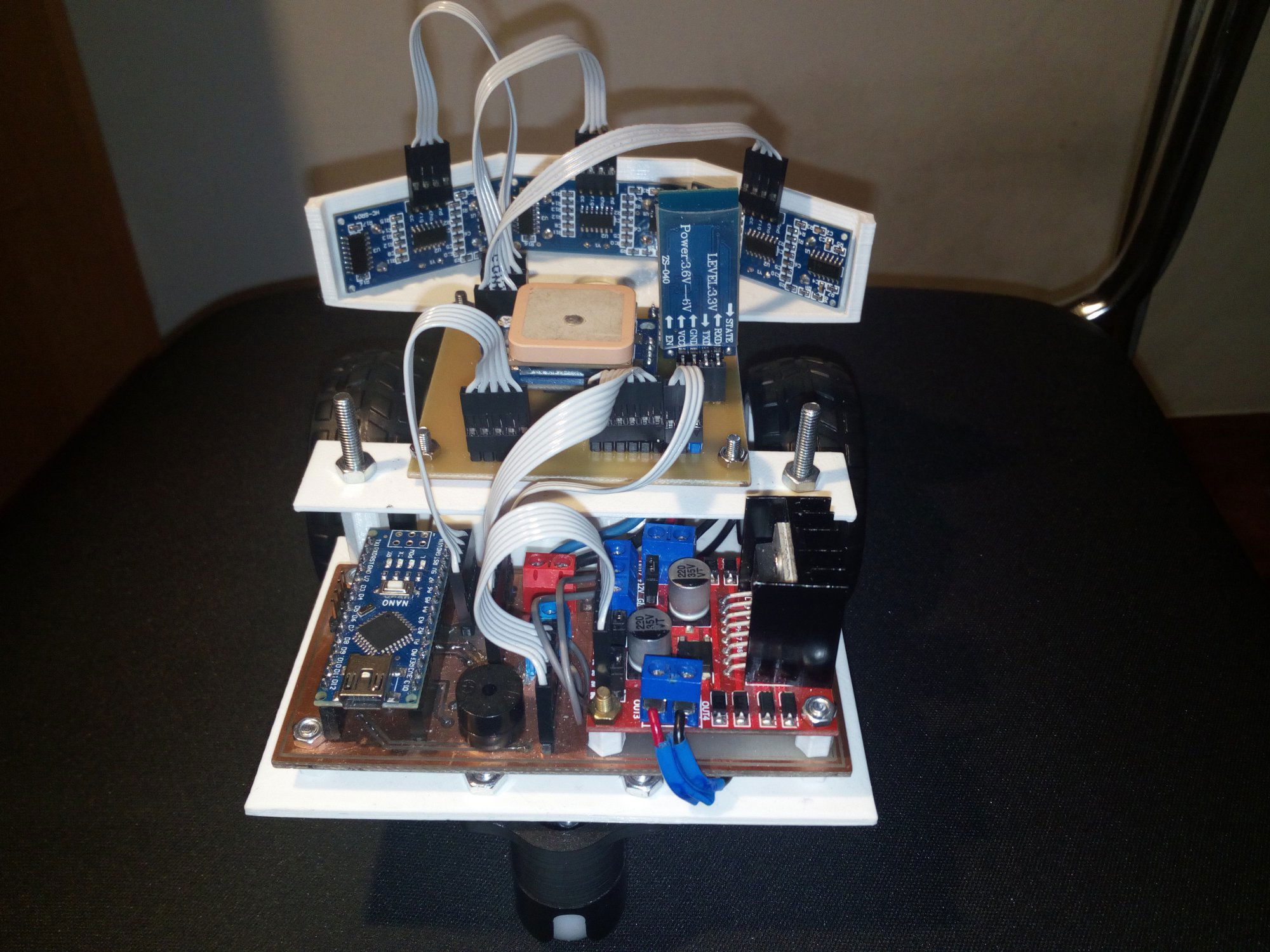
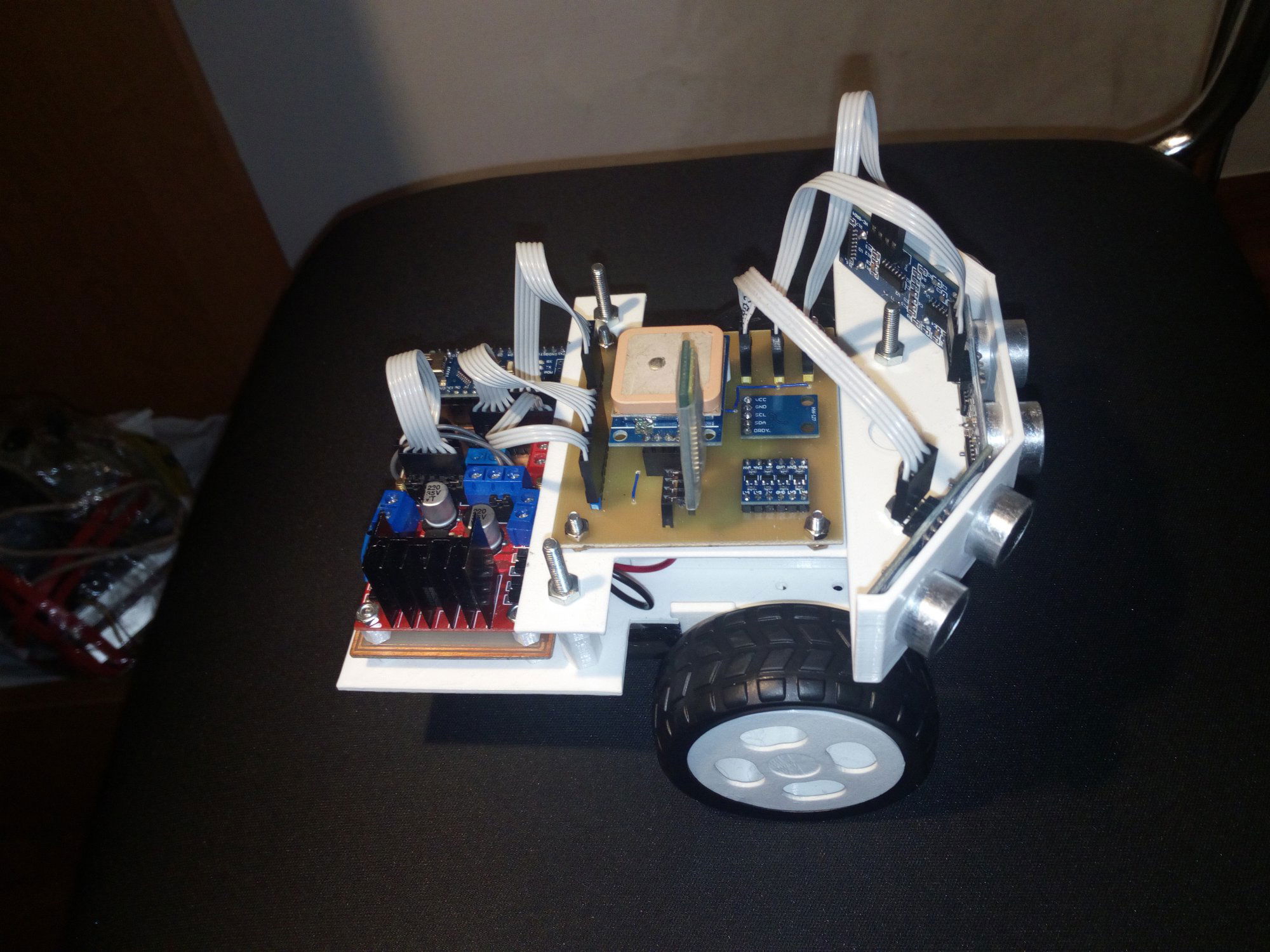
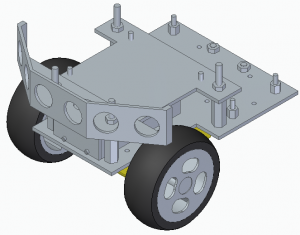
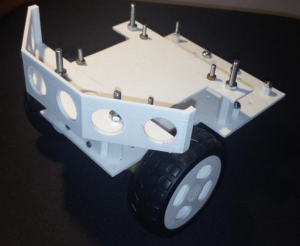
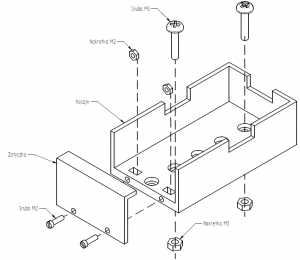
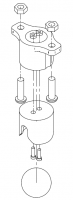
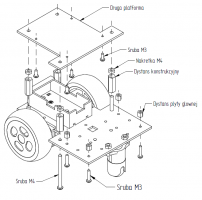
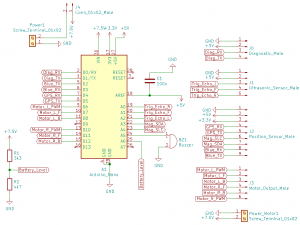
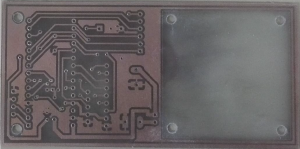
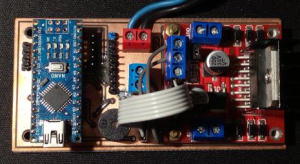
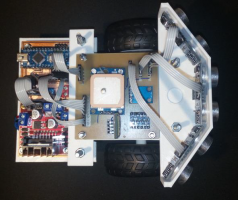
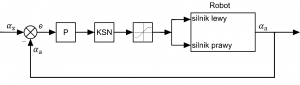
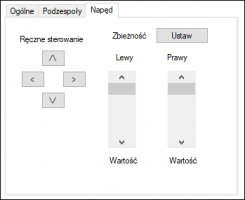
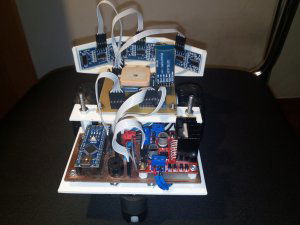
Autonomiczny robot mobilny z nawigacją GSP W życiu każdego studenta przychodzi monet, kiedy musi się spiąć i zrobić pracę inżynierską. Jako, że większość proponowanych tematów przez uczelnię nie wpadło w obszar moich zainteresowań, a już od jakiegoś czasu chciałem „pobawić się” w budowę robota z GPS to właśnie taki temat zaproponowałem promotorowi i bez problemów został zaakceptowany (kierunek – AiR). Potem jak się okazało nie był to do końca dobry pomysł z uwagi na problemu w testowaniu GPS – testy przypadły głównie na styczeń – a więc w tym roku deszcze itp. a nawigację trzeba jednak testować na dworze. To tyle tytułem wstępu a teraz do bardziej praktycznych zagadnień. Robot z założenie miał być 2 kołowy + jedno koło wleczone, posiadać moduł bluetooth do wstępnej kalibracji i wpisywaniu współrzędnych, sterowany za pomocą Arduino Nano (w tym przypadku klon), a jego zmysłami poznawania świata miał być: moduł GPS Neo-6m, magnetometr oraz 3 czujniki ultradźwiekowe z przodu do wykrywania przeszkód. Przeszukałem pełno gotowych platform mobilnych ale żadna mi do końca nie pasowała, a że od niedawna byłem właścicielem drukarki 3D to postanowiłem zaprojektować własną i wydrukować z PLA. Projekt owej platformy zrobiłem w środowisku CAD w programie Solid Edge i wyglądał tak jak poniżej. Składa się z 2 platform oraz miejsca na czujniki ultradźwiękowe: dolna na arduino, sterownik i akumulator, a górna na pozostałe podzespoły. Jak widać pokusiłem się o zamodelowanie również felg do już gotowych kół – okazało się że mają efekt „ósemkowania” co uniemożliwiało prostą jazdę. Koło wleczone zastąpiłem jednak Ball Caster'em, ponieważ te które użyłem miało straszne luzy i również powodowało samoczynną jazdę po łuku. A tak prezentuje się już wydrukowana i złożona platforma: Jako że wszystko było zamodelowane w CAD’zie to mogłem porobić rysunki złożeniowe rodem jak z sklepów meblowych (może projektowanie mechaniczne to dobry pomysł na artykuł ) Kolejnym krokiem było zrobienie elektroniki. Aby wyglądało to w miarę estetyczniej to pokusiłem się o zrobienie płytki PCB – projekt w KiCad'zie a potem termotransferem na laminat (tam gdzie Arduino to płytka dwustronna, a tam gdzie moduły jedno) Jeszcze tylko zasilanie – Li-Pol 2s firmy Redox (pomocny w ogarnięciu tego tematu był artykuł na Forbocie – wielkie dzięki za kompendium wiedzy w pigułce) i możemy zaczynać programować – a to dla mnie było największym wyzwaniem. Wrzuciłbym kod ale to jest 700 linijek napisanych raczej łopatologicznie więc tylko ja się w nim odnajduję Jak byście mieli jakieś pytania odnośnie działania jakiejś części to podrzucę i postaram się wyjaśnić. Jako, że byłem na AiR no to fajnie by było wrzucić jakiś nawet prosty regulator – zdecydowałem się na Proporcjonalny a układ regulacji wygląda następująco: (KSN – kompensacja strefy nieczułości) Działał on dosyć dobrze, im robot "był dalej" od zadanego kontu tym szybciej obracał się a im bliżej tym zwalniał, zaś przeregulowanie było znikome. Gotowy robot prezentuje się tak: Niestety wszystko nie było takie piękne i proste, a to niektóre napotkane problemy Magnetometr praktycznie nie działał. Wskazywał azymut w przedziale może z 0-15o. Powodem było pole magnetyczne wytwarzane przez magnesy silników. Google jednak nie znały odpowiedzi co zrobić z tym faktem więc testowałem po kolei różne warianty i tak o to idealnym rozwiązaniem okazało się umieszczenie silników w stalowe rurki. Z powody złych warunków na dworze testowanie robota nie było zawsze możliwe. Arduino też nie wyrabiał jak dostawał tyle danych (GPS okazał się bardzo obciążający – w momencie kiedy dostawał pakiet danych to Ardu zaczęło wariować). GPS i bluetooth nie mogły działać w tym samym momencie więc nie miałem możliwości zdalnie dowiedzenia się co robot w danej chwili „miał na myśli”. Generalnie to wszystko działało ale osobno: jak testowałem unikanie przeszkód i ustawianie się na dany kąt to była gitara. Dołożyłem do tego GPS to raz działało a raz nie – jak wspomniałem po dostaniu pakietu danych zaczynał wariować przez chwilę. W planach mam zamianę Ardu na STM32 i spróbowanie ponownie ruszyć temat. Dodatkowo napisałem prostą aplikację w C#, która komunikowała się z robotem przez bluetooth i można było łatwiej testować podzespoły i wprowadzać współrzędne. Praca została obroniona na 5 więc było warto poświęcić nad tym dużo czasu. Zapraszam do komentowania





- 9 odpowiedzi
-
- 12
-

-
- GPS
- Magnetometr
- (i 2 więcej)
-
Witam. Za pomocą magnetometru (np.HMC5883L) muszę obliczać azymut (jak kompas), ale magnetometr może nie być równoległy do ziemi, bo będzie zamontowany w samolocie. W Internecie znalazłem wzory na to, ale jest napisane, że te wzory działają tylko, jeżeli magnetometr jest ustawiony równolegle do ziemi. Znalazłem również wzory wykorzystujące magnetometr i akcelerometr, pozwalające na obliczanie kierunku względem północy bez względu na to, czy magnetometr jest równoległy do ziemi. Czy istnieje sposób obliczania azymutu bez względu na orientację bez użycia akcelerometru, tylko magnetometru?
-

[STM32][MPU9250][AK8963] Problem z odczytem danych z magnetometru
fasolus opublikował temat w Mikrokontrolery
Cześć. Mam mały problem z modułem MPU9250, a konkretniej AK8963 (Magnetometr). Odczyt wartości zmierzonych przez akcelerometr i żyroskop nie sprawiły mi większych problemów i wszystko działa prawidłowo. Sprawa skomplikowała się kiedy zechciałem odczytać wartości zmierzone przez magnetometr. Ogólnie komunikacja z magnetometrem działa prawidłowo (WHO_AM_I itd.). Problem polega na tym, że po odczytaniu wartości z rejestrów HXL, HXH... cały czas otrzymuję wartość -1 dla każdej osi. Fragment kodu z inicjalizacją magnetometru: MPU9250_Error_code MPU9250_Magnetometer_Configuration(I2C_HandleTypeDef *I2Cx, struct MPU9250 *DataStructure) { uint8_t Byte_temp = 0x00; uint8_t Bytes_temp[3] = {0}; DataStructure->Magnetometer_addres = 0x0C << 1; // Case 2: Disable the I2C master interface Byte_temp = 0x00; if( HAL_I2C_Mem_Write(I2Cx, DataStructure->Device_addres, MPU9250_USER_CTRL, 1, &Byte_temp, 1, 1000) != HAL_OK ) { //HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin); return MPU9250_Magnetometer_Config_FAIL; } // Case 3: Enable the bypass multiplexer Byte_temp = 0x02; if( HAL_I2C_Mem_Write(I2Cx, DataStructure->Device_addres, MPU9250_INT_PIN_CFG, 1, &Byte_temp, 1, 1000) != HAL_OK ) { //HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin); return MPU9250_Magnetometer_Config_FAIL; } // Case 1: Is device connected ? if( HAL_I2C_IsDeviceReady(I2Cx, DataStructure->Magnetometer_addres, 1, 1000) != HAL_OK ) { //HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin); return MPU9250_Magnetometer_Config_FAIL; } // Case 2: Who am i test if( HAL_I2C_Mem_Read(I2Cx, DataStructure->Magnetometer_addres, MPU9250_WIA, 1, &Byte_temp, 1, 1000) != HAL_OK ) { //HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin); return MPU9250_Init_FAIL; } if( Byte_temp != 0x48 ) { //HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin); return MPU9250_Init_FAIL; } // Case 4: Setup to fuse ROM access mode and 16-bit output Byte_temp = 0x1F; if( HAL_I2C_Mem_Write(I2Cx, DataStructure->Magnetometer_addres, MPU9250_CNTL1, 1, &Byte_temp, 1, 1000) != HAL_OK ) { //HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin); return MPU9250_Magnetometer_Config_FAIL; } HAL_Delay(100); // Case 5: Read from the fuse ROM sensitivity adjustment values if( HAL_I2C_Mem_Read(I2Cx, DataStructure->Magnetometer_addres, MPU9250_ASAX | 0x80, 1, Bytes_temp, 3, 1000) != HAL_OK ) { //HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin); return MPU9250_Magnetometer_Config_FAIL; } DataStructure->Magnetometer_ASAX = ( ( (Bytes_temp[0] - 128) * 0.5 ) / 128 ) + 1; DataStructure->Magnetometer_ASAY = ( ( (Bytes_temp[1] - 128) * 0.5 ) / 128 ) + 1; DataStructure->Magnetometer_ASAZ = ( ( (Bytes_temp[2] - 128) * 0.5 ) / 128 ) + 1; // Case 6: Reset to power down mode Byte_temp = 0x00; if( HAL_I2C_Mem_Write(I2Cx, DataStructure->Magnetometer_addres, MPU9250_CNTL1, 1, &Byte_temp, 1, 1000) != HAL_OK ) { //HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin); return MPU9250_Magnetometer_Config_FAIL; } // Case 7: Enable continuous mode 2 and 16-bit output Byte_temp = 0x16; if( HAL_I2C_Mem_Write(I2Cx, DataStructure->Magnetometer_addres, MPU9250_CNTL1, 1, &Byte_temp, 1, 1000) != HAL_OK ) { //HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin); return MPU9250_Magnetometer_Config_FAIL; } HAL_Delay(100); return MPU9250_Magnetometer_Config_OK; } Fragment kodu z odczytaniem zmierzonych wartości: MPU9250_Error_code MPU9250_Read_Magnetometer(I2C_HandleTypeDef *I2Cx, struct MPU9250 *DataStructure) { uint8_t Bytes_temp[7] = { 0x00 }; if( HAL_I2C_Mem_Read(I2Cx, DataStructure->Magnetometer_addres, MPU9250_HXL | 0x80, 1, Bytes_temp, 7, 1000) != HAL_OK ) { //HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin); return MPU9250_Read_Magnetometer_FAIL; } DataStructure->Magnetometer_X = Bytes_temp[0] | Bytes_temp[1] << 8; DataStructure->Magnetometer_Y = Bytes_temp[2] | Bytes_temp[3] << 8; DataStructure->Magnetometer_Z = Bytes_temp[4] | Bytes_temp[5] << 8; return MPU9250_Read_Magnetometer_OK; }