Przeszukaj forum
Pokazywanie wyników dla tagów 'Sumo'.
Znaleziono 6 wyników
-
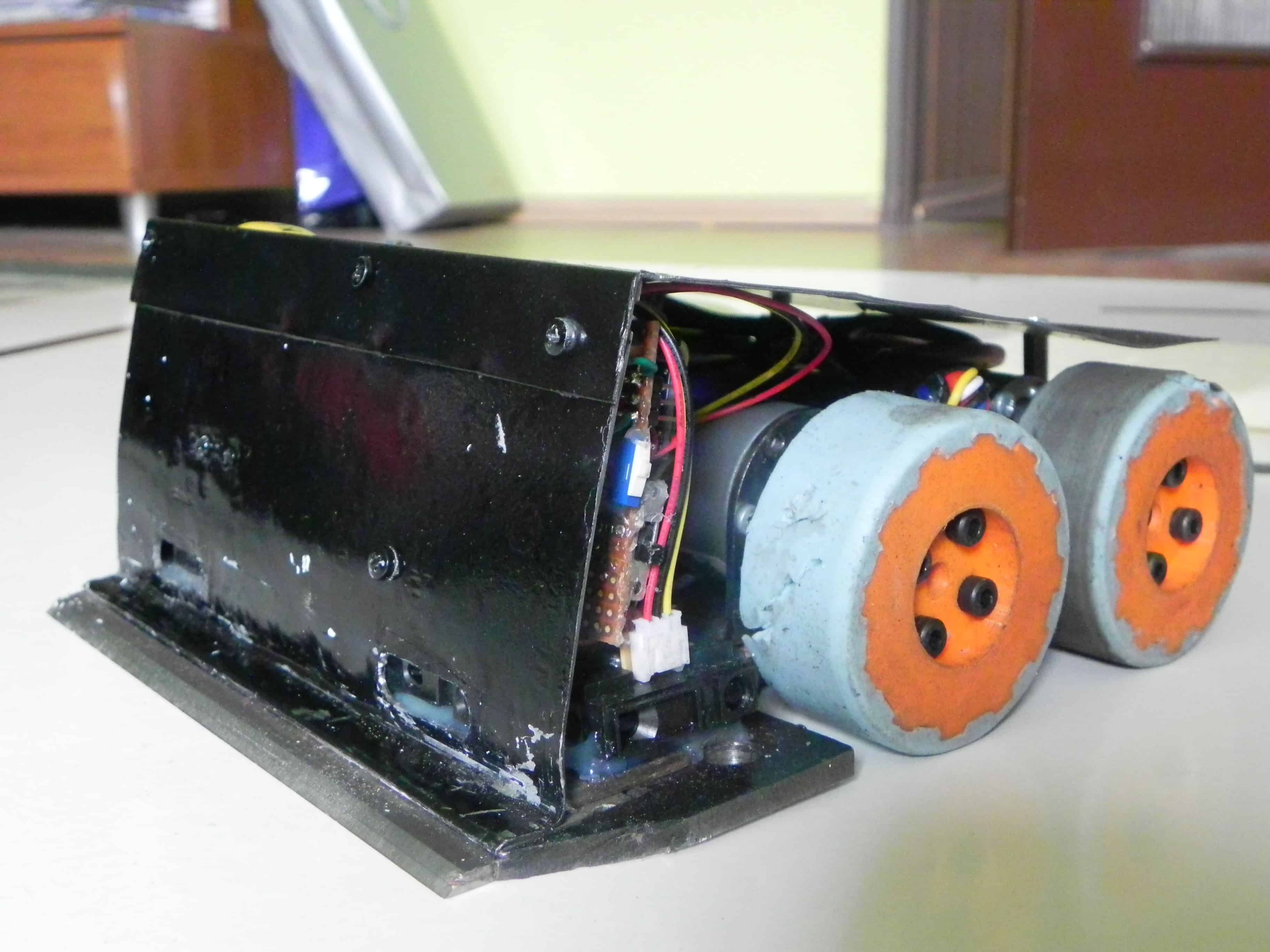
Od dość dawna na Forbocie nie pojawił się żaden nowy robot klasy Sumo. Dlatego postanowiłem opisać swoją konstrukcję, która debiutowała na Robocompie 2015. Konstrukcja mechaniczna: Efektem prac nad robotem klasy Standard Sumo jest robot o nazwie Puszek. Mieści się on w wymiarach 20x20cm i wadze 3kg. Jego podwozie stanowi stalowa blacha o grubości 5mm. Z przodu umieszczony jest nóż ze stali HSS, który powinien wytrzymać starcia z innymi robotami. Koła mają średnicę 55mm i składają się z wydrukowanych felg i opon odlanych z silikonu. Dzięki miękkiemu silikonowi uzyskana została dość dobra przyczepność, jednak opony takie łatwo ulegają uszkodzeniom i po pewnym czasie wymagają wymiany. Każde koło napędzane jest osobnym silnikiem Robotus Titan. Zasilane są one z LiPo 4s 3.3Ah. Jednak mimo napięcia wyższego niż znamionowe, silniki są zbyt słabe, żeby robot nawiązał równą walkę z dużo mocniejszymi konstrukcjami. Niestety podczas składania okazało się, że robot będzie zbyt ciężki, dlatego blacha stanowiąca podwozie została nawiercona, co widać na zdjęciu poniżej: Elektronika: Mózgiem robota jest Arduino Mini, czyli popularna Atmega328p. Odpowiada ona za odczyty 4 czujników przeciwnika Sharp GP2Y0A21YK0F, 2 czujników linii KTIR0711S oraz odpowiednie wysterowanie silników poprzez mostki oparte na półmostkach BTS7960B. Są to najtańsze mostki H z ebay, o teoretycznie wystarczającej mocy. Jak do tej pory wszystko jest z nimi ok. Cała elektronika zasilana jest poprzez stabilizator LM7805, który wymagał założenia dodatkowego radiatora. Za odpowiednie wysterowanie silników odpowiada regulator typu P, którego sygnałem wejściowym jest błąd obliczany na podstawie odczytów z czujników przeciwnika, natomiast wyjściem jest sygnał PWM oraz kierunek obrotów silników. Kilka filmików z YT nagranych w Łodzi przez użytkownika ps19: Osiągnięcia: 1. I miejsce Robocomp 2015 2. II miejsce SumoChallenge 2015 W przyszłości planuje stworzyć konstrukcję na dużo mocniejszych silnikach, z którą będę mógł się również pokazać i powalczyć w Wiedniu.

-
Anusiak: Robot stworzony w większości z aluminium, metalowe przekładnie, widły wykonane z linijek metalowych blokowane dźwigniami poruszanymi serwem- otwierają się za pomocą sprężyn. Program najprostszy z możliwych napisany w Bascomie. Koła toczone z rury stalowej, oklejone gumą. Elektronika: uC- ATMEGA16 2x SHARP 150cm 2x SHARP 80cm 4x TRCT5000 sterowanie silników-przekaźniki Mechanika: silniki 4x GRAUPNER SPEED 480 RACE 7,2V przekładnie planetarne z wkrętarek serwo Zasilanie: pakiet 1s 3000mAh pakiet 3s 500mAh Kilka fotek:

-
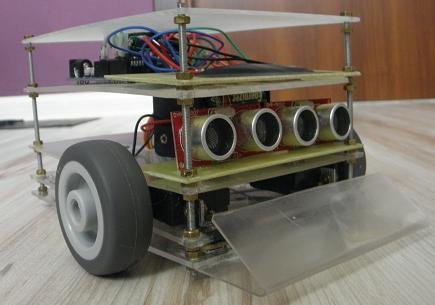
Witam serdecznie Jest to moje pierwsze dzieło. Robocik nazywa się SUMOPIECH. Jego serce to Arduino Duemilanowe. Jako czyjniki linii zostały użyte TCRT5000L, natomiast jako czujniki odległości DYP-ME007. Niestety robot zasilany jest paluszkami ale planuje zakupic akumulatorek. Jako napęd wykorzystane dwa przerobione serwa TURNIGY 1160A o momencie obrotowym 2,1 kg/cm. Oprogramowanie jest napisane w środowisku przystosowanym do Arduino. Bardzo łatwe do napisania dla początkującego. Oto kilka fotek: A oto filmik jak robot działa: __________ Komentarz dodany przez: Treker Dodałem brakujący załącznik.

-
Chciałbym Wam przedstawić robota klasy sumo - Rico. Wielu z Was miała przyjemność zobaczyć go podczas zawodów CybAiRBOT w Poznaniu, bądź też na filmikach. ➡️Elektronika: Jedna z bardziej udanych rzeczy w robocie, tu należy się mega pochwała dla użytkownika nes86, któremu udało się upakować wszystko w wymiarach 6x8cm. Na płytce znajdują się (główne elementy): - Przetwornica liniowa, - Procesor - ATmega1280 - wybrany, aby mieć 16 wejść przetwornika ADC, - Dwa mostki vnh, dodatkowo chłodzone miedzianymi radiatorami, - Tsop - do startowania robota, - Potencjometr, diody led, wyświetlacz LCD 2x8 znaków. To tak po krótce. Dodatkowo z części elektronicznych na robocie znalazły się: - 10 czujników Sharpa GP2D12, - Czujniki linii - CNY70, Robot był wykonywany wspólnie z użytkownikiem nes86, o to rendery z programu Autodesk Inventor: Do startowania robota służyły pokazywane wcześniej piloty użytkownika nes86: ➡️Zasilanie: Dwa pakiety Dualsky 800mAh 11,1V, co daje w sumie 22,2V. ➡️Silniki: Sztuk 4, przy 24V mają około 500 obrotów, ich mocy nie będziemy zdradzać 😉 ➡️Obudowa + koła + kliny: Obudowa wykonana z czarnej plexi 8 i 3 mm - dodatkowo wzmacnianej laminatem. Niestety pomysł z pleksi okazał się maksymalnie chybiony. O ile łatwo i tanio mogliśmy wyciąć sobie obudowę, to materiał okazał się zbyt kruchy i zaznaliśmy kilku pęknięć 😉 Koła aluminiowe toczone specjalnie pod robota. Kliny wykonane z zawiasów, metalowych linijek Topexa 😉 Wszystkie elementy metalowe zostały pomalowane proszkowo na czarno. Oto jak robot wyglądał na kilka dni przed zawodami: I elektronika: Wybaczcie jakość zdjęć, ale na chwilę obecną lepszych nie posiadam. Jeśli chodzi o same zawody to o ile dzień wcześniej na ringu zachowywał się bezbłędnie to na zawodach miał trochę problemów. Zdaję sobie sprawę, że opis jest nieco lakoniczny, proszę więc Was o pytania, które z pewnością uzupełnią opis. Robot zajął pierwsze miejsce w klasyfikacji konstrukcji sumo na zawodach Robotic Arena 2010 oraz Sumo Challenge 2010!

-
Witam wszystkich forumowiczów:) Postanowiłem zaprezentować jednego z moich robotów z kategorii Sumo Standard. Jest to Konieczko (młodszy z moich dwóch robotów). Charakterystyka: Elektronika: - schemat i płytka mojej produkcji - uC AT89C2051 - proszę się nie śmiać 🤣 - mostek-H -brak (zastępują go przekaźniki) - czujniki linii CNY70 (aktualnie nie sprawne po walce w Wiedniu z Cedronem 🙂 ) - przedni czujnik Sharp 1500mm - 2 boczne czujniki Sharp 100-800mm Zasilanie: - do tej pory były 2xPb 6V 1,3Ah - aktualnie pakiety 7,2V 1600mAh + 11,1V 2200mAh (jeszcze nie testowane na zawodach) Mechanika: - silniki + przekładnie z wkrętarek - koła stal + guma - obudowa spawana z aluminium - pokrywa z siatki stalowej Niżej kilka fotek i filmik

-
Witam Was! Chciałbym w paru słowach opowiedzieć o swoim robocie klasy sumo budowanym na tegoroczne zawody w Poznaniu. Pierwszym, głownym i najwazniejszym priorytetem było to aby robot w ogóle wystartował w zawodach... czyli przeszedl eliminacje 🙂. Robota robilem sam bez sponsorów i bez wspołpracy z kimkolwiek (kola naukowe itd). Robot wyniósł ok 400 zl - tak mi sie wydaje. W zasadzie wszystko robilem sam - nie kupowalem gotowych modułów - czujniki Sharpa byly tylko oryginalne. Napęd robota to cztery silniki i przedładnie z wkretarek z Tesco 😉 Obudowa aluminiowa. Zasilanie silnikow to jeden akumulator 3,7V Li-Po ze sklepu modelarskiego, zasilanie elektroniki to 11,1 V akumulator modelarski Li-Po. Steruje tym Atmega32. Czyjnik linii zrobiony z 4x CNY70 i komparatorow:). Sterowanie silnikami przez mostek typu H na MOSFETach. Czujniki zblizeniowe Sharpa - te wieksze 🙂 Ale tylko dwa... Zawodow nie wygralem bo 🙂 - byli lepsi 🙂 - silniki z Tesco - tylko dwa czujniki zblizeniowe Ale zabawa była suuuper - mowie Wam 😃 - jestem bardzo zadowolony 🙂 Poniżej kilka zdjęć 🙂 Na youtubie jest kilka filmikow z testow mojego robota.. to jeden z nich 🙂 -> http://pl.youtube.com/watch?v=3j-1M2WUv6U Eliminacje: Sparingi: Testy na zawodach - ogolna zabawa 🙂 Pozdrawiam serdecznie!